
摩擦式提升机发生钢丝绳滑移的原因和预防措施
2020-11-05 02:57:52杜向阳王秀平赏龙军冯卓炜
安全 2020年10期
杜向阳 王秀平 赏龙军 冯卓炜
(浙江省应急管理科学研究院,浙江 杭州 310012)
0 引言
多绳摩擦式提升机由于结构紧凑、提升速度快、提升深度不受卷筒容绳量限制等优点,被广泛应用于金属非金属地下矿山的立井提升中。同时,摩擦式提升机是依靠主提升钢丝绳与摩擦轮之间的摩擦力进行传动,完成对物体和人员的升降任务。提升钢丝绳搭放在主导轮上,提升容器悬挂在两端。当电机主导轮转动时,主导轮上的摩擦衬垫与钢丝绳之间的摩擦力便带动钢丝绳随着主导轮一起转动,从而实现容器上升或下降。这要求钢丝绳与衬垫之间不应有相对滑动,但提升过程中可能会出现衬垫摩擦系数降低、超载、制动力矩调整不合理等,这些均可能造成工作时产生滑动,引发一系列重大事故[1],不仅会影响矿井的正常生产,甚至还会造成财产损失和人员伤亡。
依照《金属非金属矿山在用摩擦式提升机安全检测检验规范》AQ 2021-2008,对摩擦式提升机开展定期检测,是一种真实反映提升机运行安全状况并能够及时发现钢丝绳滑移等安全隐患,保障摩擦式提升机安全运行的有效手段。
1 提升机概况及检测设备
2019年12月,检测机构对浙江兰溪某萤石矿企业在用的落地式多绳摩擦式提升机进行了定期检测,该提升机安装于地面,为该矿竖井提升作业人员和物料的关键设备,也是矿山生产的咽喉要道。其技术参数,见表1。

表1 落地式多绳摩擦式提升机技术参数表Tab.1 Technical parameters of floor type multi rope friction hoist
该提升机系统组成示意图[2](如下图),其中首绳4根,光面重要用途钢丝绳,型号为6×19S+FC,直径22mm,使用时间2年,钢丝绳实际磨损量为2.1%,重量共计2.45t;尾绳2根,直径30mm,重量共2.52t;空载罐笼重量6.8t,重载罐笼重量12.7t,平衡锤重量9.5t,罐笼和平衡锤分别悬挂在钢丝绳的上下两端,尾绳用来保证提升罐笼的平衡性;罐笼允载矿车2辆,物料和矿车重量共计5.9t,经计算最大静张力差32.7kN。

图 落地式摩擦式提升机系统的组成Fig. Composition of floor type friction hoist
检测专用设备采用了某大学下属单位开发的矿用机电设备无线多参数测试仪,型号为CDD11W(A),并经过计量校准,检测精度有效且可溯源。该设备打破了传统有线数据传输方式,采用短距离(≤20m(无中继)和≤40m(有中继))无线传输,使得测试时不用再考虑传感器的数据线被卷入测试对象的旋转部件的风险,且因无数据线的牵绊,可以让检测人员与测试对象保持更远的距离,作业位置更加安全便捷,更加适合于井下硐室中的检测作业。
2 钢丝绳滑移情况
检测人员在测试完成制动器液压曲线、正常运行速度曲线,并验算制动力矩满足安全要求后,对提升机进行了空罐状态下的安全制动测试。为测试提升机的制动减速度,将速度传感器滚轮紧贴在制动盘上,尽力保持与摩擦轮外径相同的位置,同时,从司机操作台的紧停按钮电接点回路上,取出同步的220V交流电压,目的是可以在按钮动作时,电压阶跃的脉冲前沿作为安全制动的记时起点,确保制动减速度的测试精度。考虑到配重侧重量大于罐笼侧重量,类似于提升重载的工况,可获得大制动减速度,故安全制动测试采用罐笼由井口按提升物料的速度(6.1m/s)下放运行方式。
当罐笼与配重在井筒内相遇时,按下紧停按钮使安全控制回路动作,对提升机实施安全制动。观察钢丝绳滑移情况,同时记录图1所示4、5位置2个编码器反馈的高度值。由于罐笼在井口位置时,2个编码器同时清零,且摩擦轮与天轮外径相同,故在钢丝绳与摩擦轮间不出现滑移的情况下,2个编码器反馈高度值是基本一致。
按照设定程序实施安全制动后,目测钢丝绳滑移明显,2个编码器高度差距较大,超出提升机控制误差设定值,导致提升机故障报警,制动减速度超过5m/s2。
经过2次试验,结果基本一致,见表2。
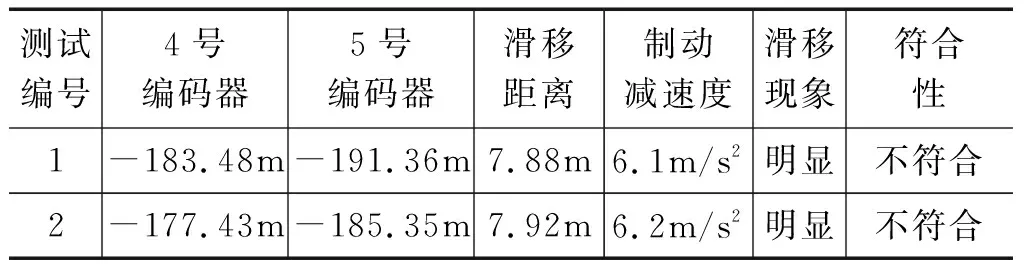
表2 测试结果表Tab.2 Test result
按照《金属非金属矿山在用摩擦式提升机安全检测检验规范》AQ 2021-2008判定规则,出现钢丝绳滑移现象、安全制动减速度超过5m/s2,均属于A类不符合项[3],检测人员可直接判定该提升机安全性能为“不合格”。
3 滑移及制动减速度超差原因分析
为了尽快消除提升机现存的安全隐患,帮助企业尽快恢复生产,检测人员和企业维护人员一起,对滑移现象及制动过快的情况开展了原因分析。
根据欧拉原理可知:T1>T2时,T1=T2eμα。
式中:
T1—重载侧钢丝绳的拉力,N;
T2—轻载侧钢丝绳的拉力,N;
μ—钢丝绳与主导轮衬垫间的摩擦因数;
α—钢丝绳在主动轮上的围包角;
e—自然对数的底,取值2.718。
摩擦轮两侧钢丝绳的拉力差为:T1-T2=T2(eμα-1)。
其中:左边表示主导轮两侧钢丝绳的张力差值,张力差值驱使钢丝绳产生相对滑动。右边表示钢丝绳与摩擦衬垫间的摩擦力,摩擦力会阻止钢丝绳产生相对主导轮滑动。工作中,若T1-T2>T2(eμα-1),则钢丝绳将发生滑动[4]。由此可以看出,导致钢丝绳产生滑移的影响因素主要有摩擦轮两侧钢丝绳张力差、钢丝绳与摩擦轮衬垫材料之间的摩擦系数及钢丝绳与摩擦轮的包角。
通过对系统各组成部件的观察,查阅安全设计专篇关于提升机选型验算以及钢丝绳、液压站等质量证明文件后,研判得出造成本案钢丝绳滑移的主要原因如下:
(1)钢丝绳表面存在油膜:由于提升钢丝绳选用型号为6×19S+FC光面重要用途钢丝绳(表明涂油型),绳芯含油量较多,即使在安装时清洗了钢丝绳表面油膜,但在运行过程中钢丝绳受力挤压,仍会将绳芯内的油自内而外渗出,在表面形成了油膜。企业虽然在钢丝绳表面涂抹了增摩脂,因表面油膜的存在,增摩脂与油膜混合后,反而降低了钢丝绳与摩擦轮间的摩擦系数。
(2)首绳长度不一致导致4根绳的受力不一:钢丝绳运行一段时间后,由于受力及材质的差异,导致4根钢丝绳的伸长率不一致,且超出张紧器的调节长度范围后,使得较长钢丝绳的张力不足,降低了钢丝绳与摩擦轮间的静摩擦力。
造成安全制动减速度超差的原因,经过分析还是因安全制动时钢丝绳发生滑移,在摩擦轮上形成的系统转动惯量发生变化所致:在安全制动时,如钢丝绳与摩擦轮间未发生滑移时,钢丝绳与摩擦轮上形成的系统转动惯量是一致的;但当钢丝绳与摩擦轮间出现滑移时,它们之间的动摩擦力远小于滑移前静摩擦力,致使原有通过静摩擦力而加于摩擦轮上的罐笼、配重及钢丝绳的转动惯量大幅度减少,从而在作用于摩擦轮上的制动力相同情况下,制动时间明显缩短而造成减速度大幅增大。
4 解决问题
在上述原因分析的基础上,考虑到现实存在的问题及减少后期维护强度等因素,企业采用了如下整改措施:
(1)更换4根首绳:在经过强度验算满足要求后,选择了内芯含油量较少的镀锌异形股重要用途钢丝绳,型号为6V×21+FC(表面不涂油);在挂绳前,用柴油清洗钢丝绳表面油膜。
(2)用柴油清洗干净摩擦轮、天轮、导向轮绳槽残余的含油增摩脂。
(3)对液压平衡装置进行检查保养,确保设备工作状态可靠[5];调整4根钢丝绳长度,保证钢丝绳液压平衡装置油缸长度满足张力调节的范围。
经过上述处理后,检测人员按照前次安全制动测试方法,对该提升机进行了2次测试,结果完全达到预期效果,具体数据,见表3。表3中显示的滑移距离应是摩擦轮与天轮绳槽直径误差所致,实质上钢丝绳无滑移。
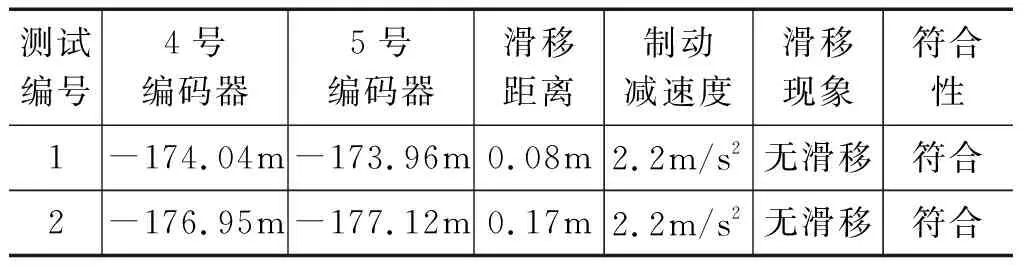
表3 整改后测试结果表Tab.3 Test results after rectification
5 建议
(1)多绳摩擦式提升机使用单位应重视对钢丝绳的选型,除了考虑钢丝绳受力满足安全系数要求外,还要考虑钢丝绳使用过程中表面油膜的形成,建议选择表面不涂油型钢丝绳。
(2)应加强对摩擦式提升机的维护保养,在钢丝绳使用一定时间后,及时清洗钢丝绳表面油膜,确保钢丝绳与摩擦轮的摩擦系数在任何运行工况下,均能满足不滑移的要求。
(3)应加强对提升机维护人员的能力培养,掌握多绳摩擦式提升机的系统构造及运行原理,明确日常检查内容和定期维护内容,确保设备安全性能始终处于受控状态。
(4)在发现钢丝绳滑移情况时,应立即停止运行,查明原因并解决后,方能再次投入使用。
(5)严格遵守定期检测制度,以全面地掌握提升机安全性能状态。
6 结论
在任何运行工况下,确保钢丝绳与摩擦轮间不能出现任何滑移,是多绳摩擦式提升机安全运行的重要保障指标。通过上文中对特定案例中钢丝绳滑移原因分析及问题的解决,可以看出使用企业应该落实专人掌握一定深度的摩擦式提升机运行机理,避免钢丝绳选型错误的类似事项发生,减少损失。同时,由于摩擦式提升机控制系统较为复杂且安全保障措施较为全面,使用企业应该加强对维护保养力量的培养,严格落实日常保养制度,满足提升机处于正常运行状态的能力要求,以充分发挥摩擦式提升机的优势,为企业高效、安全的生产提供有力保障。
猜你喜欢
能源与环保(2022年9期)2022-10-25 11:10:46
山东冶金(2022年4期)2022-09-14 09:00:00
电子乐园·上旬刊(2022年5期)2022-04-09 21:19:35
石油商技(2021年1期)2021-03-29 02:36:04
山东煤炭科技(2019年5期)2019-06-06 02:39:38
制造技术与机床(2017年2期)2017-05-04 04:17:25
新疆钢铁(2016年4期)2016-05-25 00:37:38
山西煤炭(2015年4期)2015-12-20 11:36:20
机械研究与应用(2015年4期)2015-05-11 07:58:02
机电产品开发与创新(2014年6期)2014-03-11 16:42:57
