平行流交叉口行人过街控制策略研究
2020-10-31 03:29:02安实,宋浪,王健,杨璐
交通运输系统工程与信息 2020年5期
安 实,宋 浪,王 健,杨 璐
(哈尔滨工业大学交通科学与工程学院,哈尔滨150090)
0 引 言
随着城市交通拥堵日益严重,非常规交叉口的容量优势越发明显,使得其理论研究更加重要.目前研究热点之一是连续流交叉口(Continuous Flow Intersection, CFI),CFI 相对于其他非常规交叉口,容量提升更加明显.与CFI 类似的另一种移位左转(Displaced Left-Turn,DLT)设计是平行流交叉口(Parallel Flow Intersection,PFI),由Parsons[1]提出,理论上能够提升约1 倍容量[2].Dhatrak[3]等研究结果表明,CFI和PFI通行能力相近,但因PFI左转停车次数多于CFI,导致左转通行能力低于CFI.安实[4]等结合车辆运行特征,对信号控制相位方案进行改进,重新制定PFI 控制策略,使得所有流向车流最多停车一次,降低约70%延误,相对于CFI 停车次数更少.
综上,PFI 具有良好的操作性能,但研究集中于机动车通行,没有考虑行人过街需求,仅适用以机动车出行为主的地区.为使PFI能够更好地在我国运用,解决行人过街是必不可少的.鲜有学者针对PFI行人过街问题进行研究,但一些适用于常规交叉口的行人过街模式,也适用于PFI等非常规交叉口,如行人专用相位,Tao[5]等便将行人专用相位应用在CFI控制中.常规交叉口可采用行人信号提前,人车共用相位,行人二次过街等措施保障行人过街,人行横道施划也有双向混行和左右分道.为更符合实际交通运行需要,协调好PFI行人过街与机动车通行,保证行人过街安全显得尤为重要.
本文探讨PFI行人过街问题,行人信号配时只与主信号控制有关,行人过街采用左右分道的过街形式.与其他学者提出的PFI机动车控制策略相比,安实[4]等提出的策略能够降低50%以上停车次数,而延误降低和容量提升幅度相似.本文在安实的研究基础上,结合算例说明本文行人过街控制策略与安实[4]等提出的机动车控制策略相结合效益更优.
1 基本概念及人车冲突机理分析
1.1 基本概念
图1 为PFI 布局示意图,在进口道上设置辅信号交叉口,左转车道右置,将对向一部分出口车道插入直行车道和左转车道之间,称为移位左转(DLT)车道.左转车流在主信号交叉口左转驶入DLT 车道到达辅信号交叉口,利用可穿越间隙或者信号控制驶入对向出口车道,避免左转和直行在主信号交叉口发生冲突,实现主信号交叉口放行一条道路直行车流的同时,放行另一条道路左转车流.信号相位如图2 所示,其他辅信号相位设计与辅信号WI 类似,各相位控制的放行车流如图1所示.
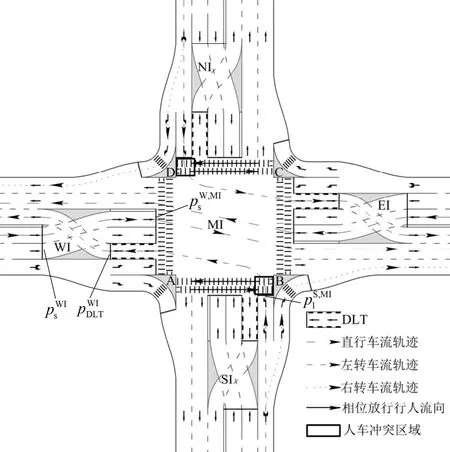
图1 平行流交叉口布局示意图Fig.1 Layout of parallel flow intersection
为方便模型构建,统一对模型参数及变量进行解释,如表1和表2所示.
为保证车辆不二次停车,主辅信号相位差满足条件为
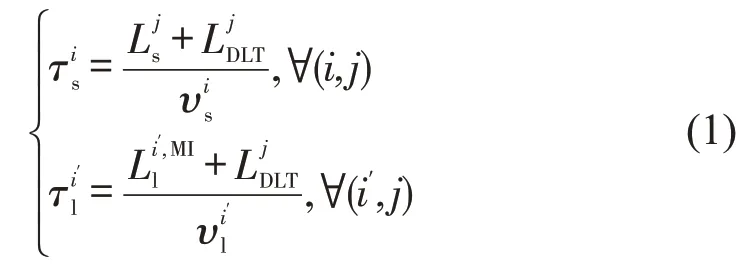
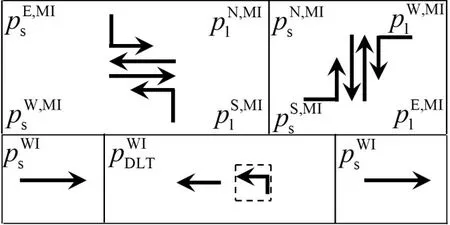
图2 信号相位方案Fig.2 Signal phase scheme
1.2 人车冲突机理分析
交通法规规定,机动车遇行人正在通过人行横道时,应停车让行,但因执法不严等,使两者在冲突点为寻找间隙穿越的交替穿插过程[6],两相位信号控制方案下经典的人车共用相位过街模式便是如此.行人与右转车流冲突通过设置导流岛避免对信号配时造成影响.本文仅探讨行人与同一相位放行的左转车流冲突,冲突区域如图1 所示.在放行东西直行车流的同时,放行南北左转车流,此时从A 往B 及从B 往A 的行人与南进口左转车流在冲突区域的运行规律是一个抢行博弈的过程,具体分析如下.
(1)从A往B,如图3(a)所示.结合图1可知,南进口左转车辆在主信号停车线等候排队,行人在A侧等候排队.t2时刻,南进口左转绿灯启亮放行左转车辆,此时行人从A侧待行区出发到达(t3)冲突区域前以饱和流率排队等候.当车流出现可穿越间隙时(t5),行人阻断车流,开始穿过冲突区域.接着,当行人流出现可穿越间隙时,机动车阻断行人流穿过冲突区域,行人排队等候.不断循环这个博弈过程,直到左转相位结束.一般t4-7/t2-7值较小,为保证行人通行安全,同时考虑到t4-7时段车流为非饱和流,将左转相位早闭,使t4-7时段完全供行人通行.或者让行人在南进口主信号左转相位结束时(t7)才开始穿过冲突区域,并在下一相位东进口左转冲突车流到达冲突区域前安全离开路口,需将东进口主信号左转相位迟起
(2)从B 往A(机动车抢先),如图3(b)所示.从B往A的行人在B侧等候排队,左转车辆在主信号停车线后等候排队,两者都紧靠冲突区域,绿灯启亮,两者抢行先后不同,运行规律也存在差异.机动车抢先的情形,在t2时刻,机动车先行通过冲突区域,行人依然排队等候.当车流出现可穿越间隙时(t4),行人阻断车流开始通过冲突区域,然后机动车再寻找可穿越间隙阻断行人流,循环这个博弈过程.一般t3-7时段较短,行人穿过冲突区域后,无法在下一相位开始前安全到达A 侧,存在一定安全隐患.
(3)从B 往A(行人抢先),如图3(c)所示.t2时刻,行人抢先通过冲突区域,机动车继续排队等候,人行横道饱和流率相对行人到来流率来说非常大,使t2-3时段很快结束;机动车可以很快寻找到可穿越间隙(t4),阻断行人流,循环这个抢行博弈过程.t5-7时段同样短,此时段放行的行人一样无法安全到达A侧.因此,考虑行人信号提前或者左转绿灯迟起,使得t2-3时段供行人通行.由图1可知,只要行人穿过冲突区域,在接下来的人行横道上与放行车辆没有冲突.
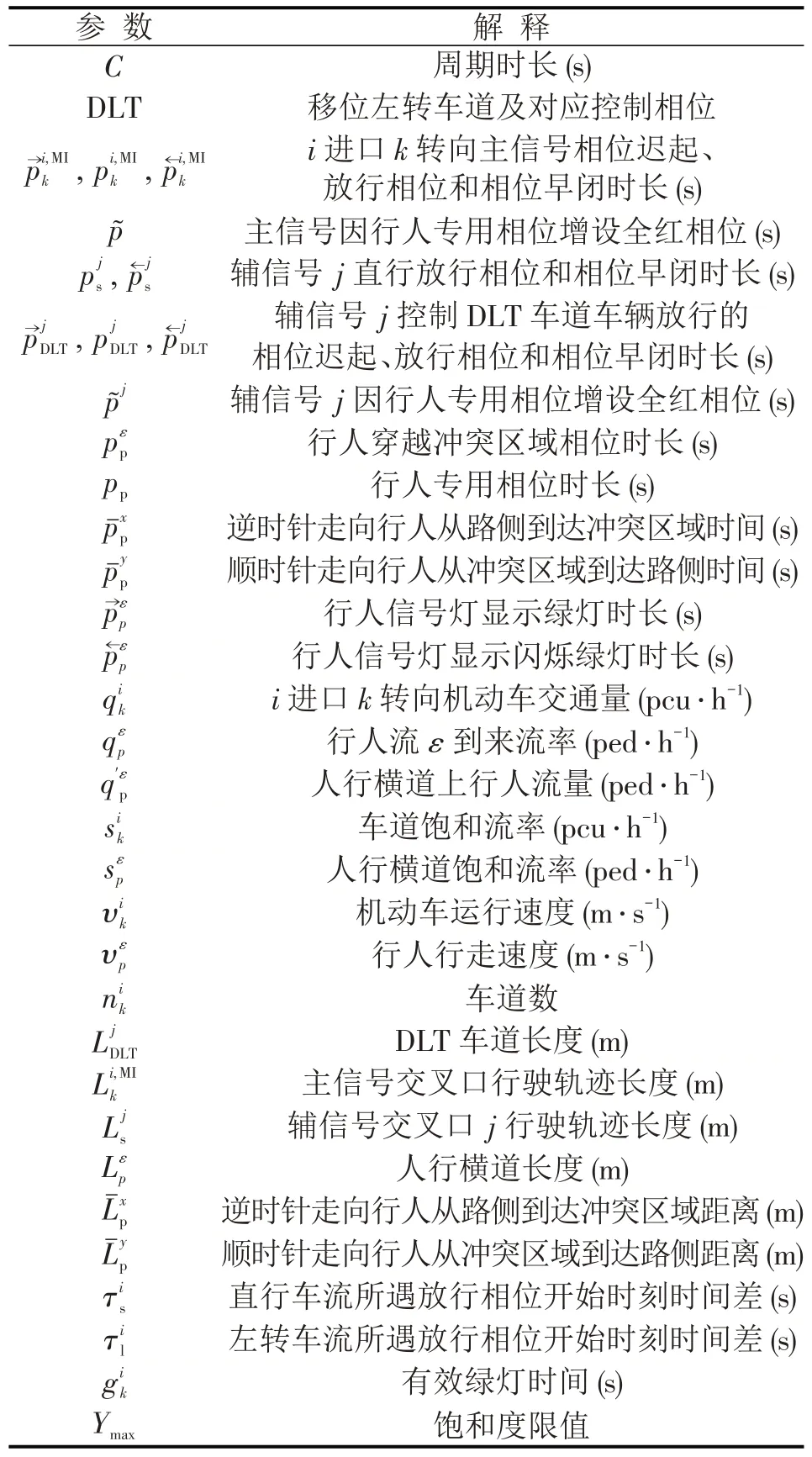
表1 参数释义Table 1 Parameter definition
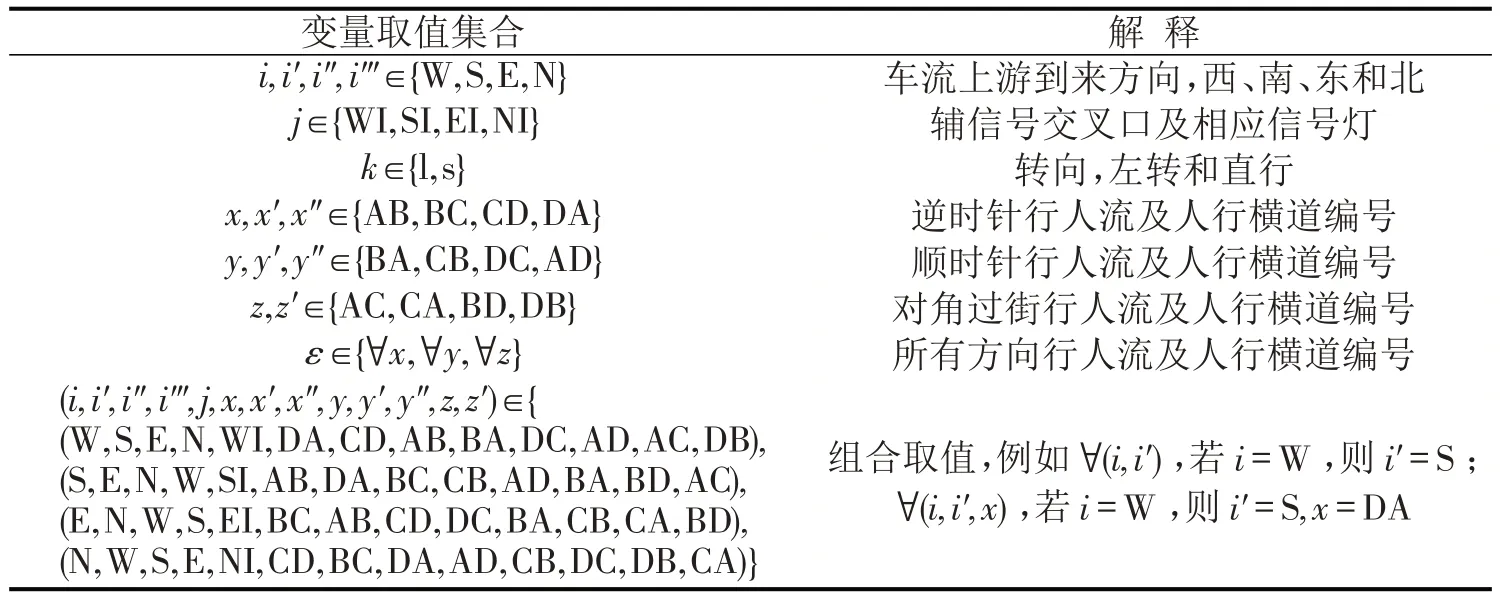
表2 变量集合Table 2 Variable set
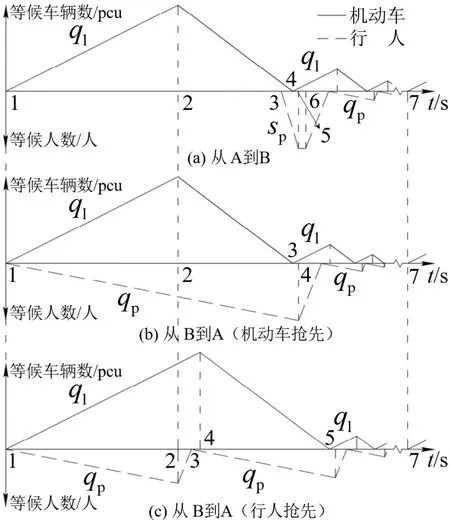
图3 冲突区域运行规律Fig.3 Operation law of conflict area
2 人车搭接相位过街模式
2.1 控制策略
根据1.2节分析,PFI信号相位设计方案如图4所示,其他辅信号、行人相位设计与辅信号WI、南进口区域行人相位类似.图4中竖向不同线形之间存在相互关系,机动车相位方案设置参考文献[4],本文只研究行人信号及其与主信号关系.
如图5所示,主信号直行相位开始时刻,同时启亮从B往A的行人信号绿灯,当行人穿过冲突区域后,主信号左转相位开始,此时行人继续行走离开交叉口而从A往B的行人在主信号直行相位开始之后,间隔一定时间,从A侧出发经时间到达冲突区域前,此时左转相位刚好结束,行人使用冲突区域路权,在下一个相位放行的左转车流到达冲突区域前,行人已经安全穿过冲突区域,相位为.行人和左转车流在时间上错开使用冲突区域,保证行人安全过街,同时也最大限度降低对机动车通行的影响.
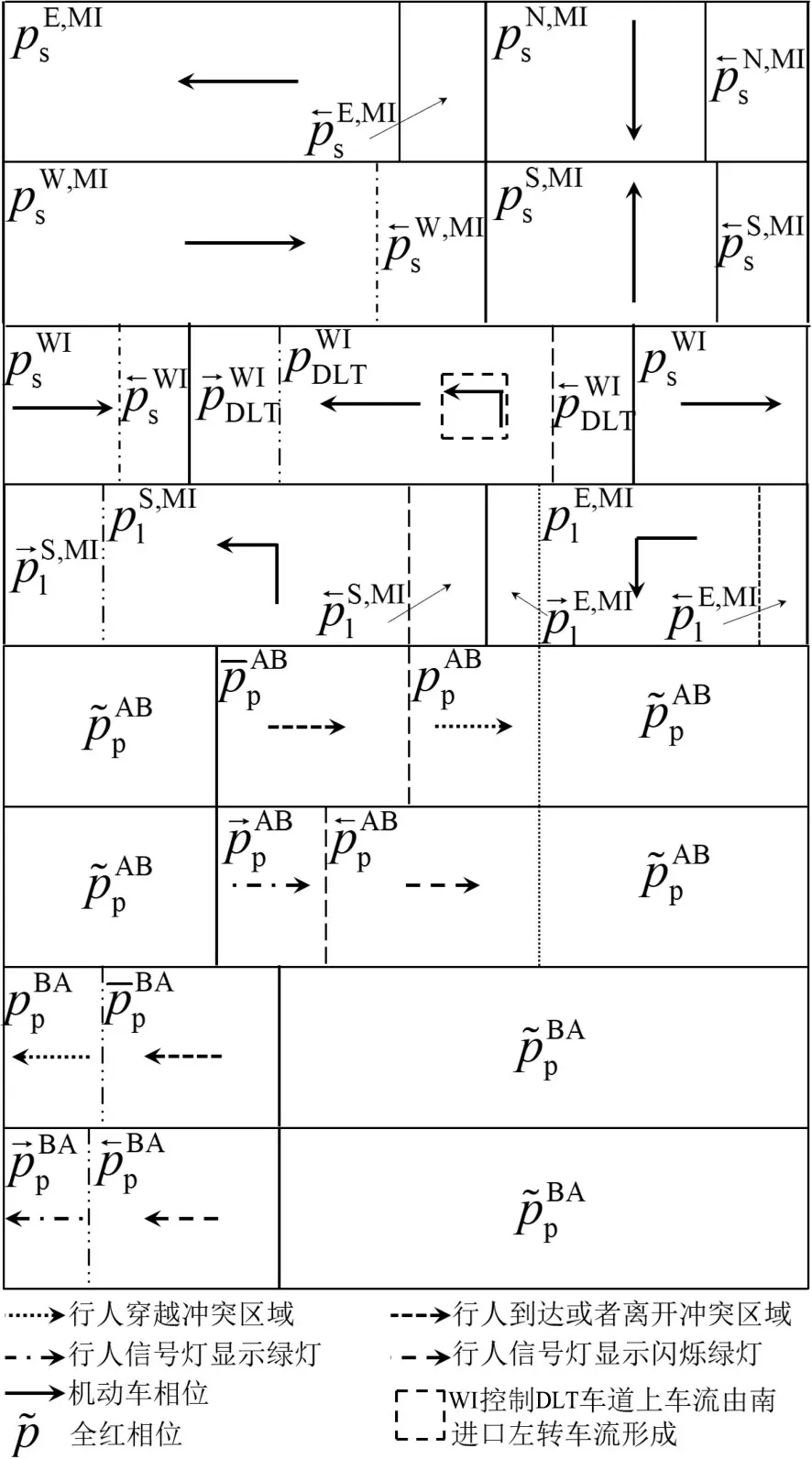
图4 信号相位方案Fig.4 Signal phase scheme
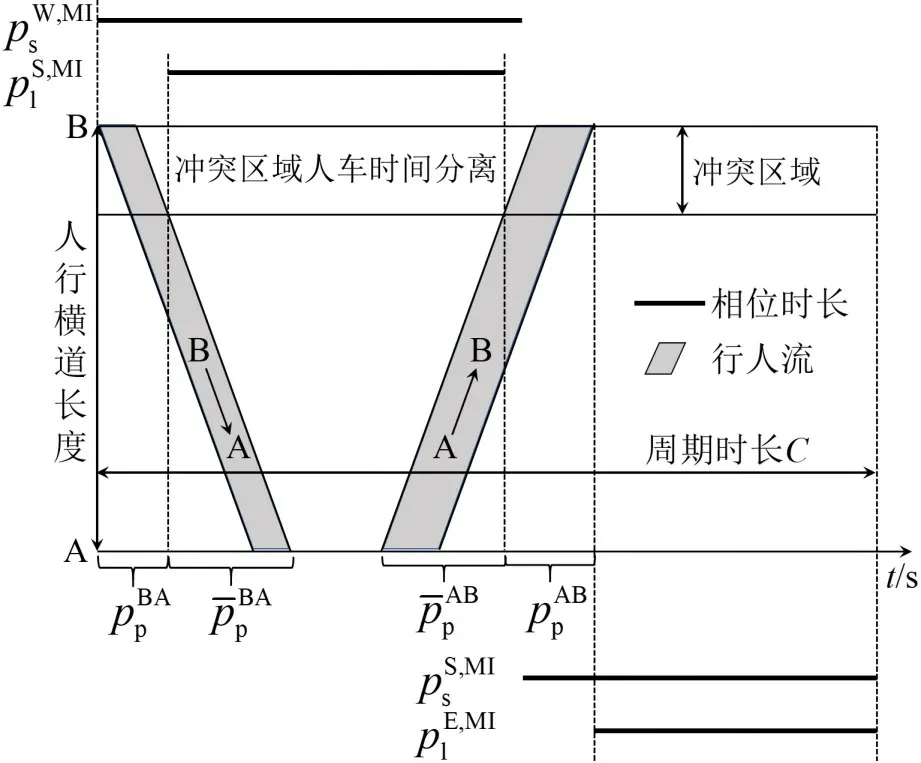
图5 冲突区域时空分布Fig.5 Spatial and temporal distribution of conflict areas
结合图4,存在等式关系为
上述探讨的行人信号是为协调人车信号配时,避免人车冲突,而行人过街信号灯显示的相位方案由绿灯和闪烁绿灯组成,所以需要对其进行重新设计,即
2.2 模型构建
主信号直行和左转相位约束为

从A 往B 的行人必须在本相位直行绿灯启亮后,才能从A侧出发前往冲突区域,同时必须在左转相位结束时,到达冲突区域并通过.从B 往A 的行人穿过冲突区域后,必须在下一直行相位开始前离开路口.存在约束为
行人过街信号灯闪烁绿灯时间计算公式为
行人过街还存在非饱和约束,即
人行横道AB 上的行人流由从A 往B,从A 往C经B绕行和从D往B经A绕行的行人流组成;人行横道BA 上的行人流由从B 往A,从B 往D 经A绕行和从C往A经B绕行的行人流组成.人行横道上的行人流量计算公式为
式(8)右端第2 项和第3 项为行人选择此条人行横道绕行的比例与对角过街需求的乘积.
将式(2)~式(8)组合变形,有
由图4可知,有
采用HCM2000[4]计算交叉口延误为
在保证行人安全过街的前提下,以车均延误最小化为目标,构建优化模型为

模型还需考虑非饱和约束,相位时长约束,非负约束,以及PFI 机动车控制所需满足的约束,即式(14)约束条件中第2~第4个.由式(14)可知,优化变量为主信号直行,左转相位时长及早闭时间,本文考虑了行人信号配时,但没有增加模型的变量数,且通过约束等价变换降低了计算复杂度.式(14)需满足下一直行相位绿灯启亮时,行人流x已穿过直行进口车道前的人行横道区域;否则,需采用二次过街,令行人提前到达冲突区域左侧排队等候以满足要求,进而需调整信号配时.
3 行人专用相位过街模式
行人专用相位是在原有机动车相位方案的基础上,增加一个行人相位,此相位禁止机动车通行.根据是否允许行人对角穿行,行人专用相位过街模式分为两种.本文探讨允许对角穿行的行人专用相位过街模式,为使所有转向车辆最多停车一次,需将辅信号全红相位置于辅信号直行相位之前.约束条件修正为
构建优化模型为
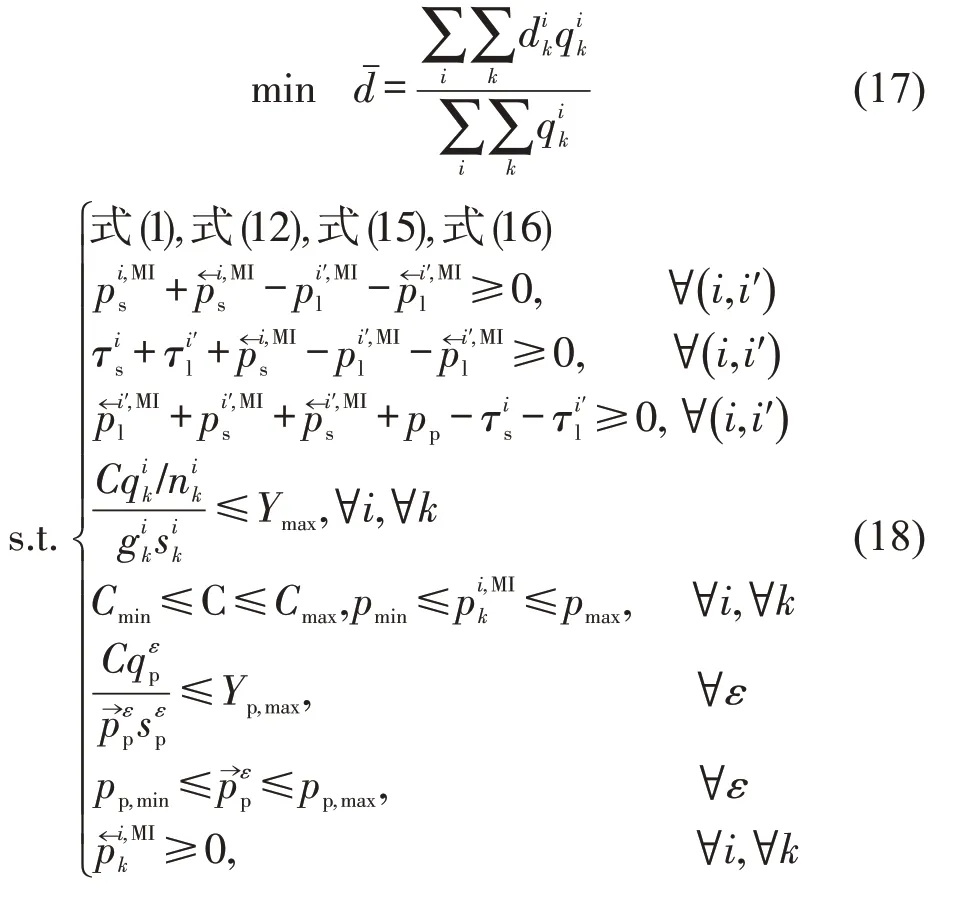
式(18)中第4 个约束条件与式(14)不同,这是因行人专用相位导致周期改变,从而改变机动车控制所需满足的约束条件.式(18)在原有变量的基础上,只增加一个行人专用相位时长优化变量.
4 算例分析
4.1 基本参数
以图1 交叉口为例,为便于分析,假设各进口道几何设置相同.相关参数如下:Cmax=150 s.
4.2 数值实验
为评价不同负荷下交叉口的交通运行状况,设计5 种机动车流量输入方案,行人过街需求为比较4种交叉口控制策略车均延误变化.计算结果如表3所示.
从表3可以看出,传统交叉口处于高饱和交通状态时,即流量方案Ⅰ和Ⅱ,两种行人过街模式下的PFI 完全能满足其通行需求,分别降低73.8%、50.3%的车均延误,交通效益提升明显.随着交通需求继续增加,流量方案Ⅲ中,PFI 能够满足其通行需求,但传统交叉口设计已经过饱和,这体现了PFI 容量优势.交通需求进一步增大时,流量方案Ⅳ中,行人专用相位过街模式处于过饱和交通状态,说明行人专用相位对PFI 的容量损失严重,此时人车搭接相位依然能满足其通行需求.对比人车搭接相位过街模式与不考虑行人过街的PFI 车均延误的变化,在多数交通场景下两者相差不大,但因人车搭接相位过街模式下行人过街占用左转通行资源,遇交叉口交通需求特别大,左转比例高的情形,会导致其过饱和,如方案Ⅳ.
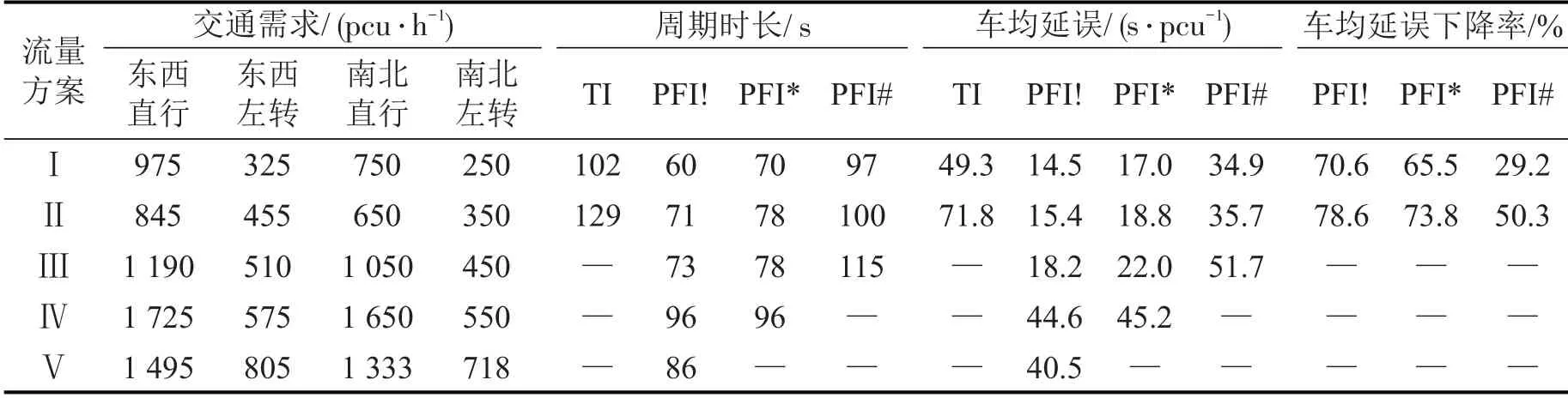
表3 流量方案及实验结果Table 3 Flow scheme and experimental results
4.3 敏感性分析
固定周期90 s 下机动车通行能力变化如图6所示.行人过街需求较小时,人车搭接相位过街模式下,行人占用的是机动车自身控制约束下未被左转车辆使用的左转迟起相位,故通行能力不受行人需求影响,交叉口道路资源得到充分利用,这也是本文选择在安实[4]等基础上研究的原因,两者结合效益更优.左转迟起相位不能满足行人过街需求时,行人会占用机动车通行资源,从而降低通行能力.
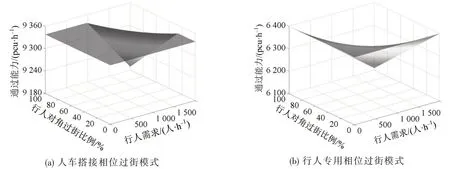
图6 行人对通行能力的影响Fig.6 Pedestrian impact on capacity
由图6 可知,两种过街模式下,行人需求变化导致机动车通行能力变化幅度分别不超过2%、5%,但行人专用相位过街模式对PFI 容量损失更为严重.
5 结 论
本文解决了平行流交叉口行人过街问题,使其更加符合实际交通运行需要.在两种行人过街模式下发现,行人需求变化对交叉口通行能力的影响很小,但行人过街模式的不同导致交叉口延误差异较大;结果显示人车搭接相位过街模式效益更佳,适用范围更广.本文仅研究了4 个进口道皆设置为移位左转车道的情形,可进一步探讨部分进口道设置,或者在T型交叉口设置的情形.
猜你喜欢
太原科技大学学报(2022年6期)2022-12-26 12:53:08
警察技术(2022年3期)2022-06-22 06:06:24
新传奇(2021年32期)2021-09-22 09:59:20
小天使·四年级语数英综合(2021年3期)2021-05-10 02:46:28
海峡姐妹(2020年8期)2020-08-25 09:30:30
中国人民公安大学学报(自然科学版)(2019年3期)2019-10-23 04:00:40
E动时尚·科学工程技术(2019年4期)2019-09-10 16:43:57
电子制作(2019年10期)2019-06-17 11:45:04
小小艺术家(2018年5期)2018-07-01 17:05:42
小天使·四年级语数英综合(2015年4期)2015-04-20 11:30:23