车辆荷载特性影响下的碰撞时间分布规律
2020-10-31 03:30:32方志纯简注清涂辉招施能艺
交通运输系统工程与信息 2020年5期
王 颖,方志纯,简注清,涂辉招*,施能艺
(1.同济大学道路与交通工程教育部重点实验室,上海201804;2.福建省交通规划设计院有限公司,福州350000;3.香港理工大学土木与环境工程系,香港999077)
0 引 言
碰撞时间(Time-To-Collision, TTC)是开发避撞系统常用的潜在冲突风险替代指标,指两车发生冲突时,两车保持原有速度差,从当前时刻至潜在冲突发生的时间段[1].TTC 与跟驰场景下车辆类型、超速和超重等车辆荷载特性密切相关.跟驰行为能够描述在限制超车的单车道上行驶车队中相邻两车之间的相互作用[2],Pipes[3]率先引入车辆跟驰的概念,并将其定义为“驾驶员高效且安全跟驰前车的决策”.确定跟驰场景的指标和方法很多,其中,《美国道路通行能力手册》规定当车头时距小于等于5.00 s 时,车辆处于跟驰状态[4],得到广泛应用.
前后车车速[5-6]、航向角[7]、行驶工况[8]、荷载特性[8]等均会对TTC 特性产生影响.张琼[5]利用自然驾驶数据,进行换道时前后车车速影响下的TTC特性分析;王畅等[6]进行前后车车速及车速差影响下的TTC 特性研究;刘庆华等[7]考虑前后车航向角、运行轨迹等要素对TTC 特性进行研究;Chen等[8]考虑车重、行驶工况、天气设计仿真算法,建立综合考虑TTC和安全制动距离的行车安全报警系统.传统交通监测技术多获取除荷载特性外的实时交通信息,如车辆通过监测断面时刻、速度等.关于车辆荷载影响下的TTC 分布规律研究,有待实测数据驱动开展进一步研究.动态称重(Weigh-In-Motion,WIM)技术,是一组含有传感器和软件的电子仪器,不仅可以捕获车辆经过监测断面时刻、速度、轴重、轴数信息,还可以通过测量动态轮胎压力来估算行驶车的荷载特性信息.因此,WIM技术能够在不中断交通运行的情况下,获取特定地点融合荷载特性的交通流数据,为分析荷载特性对TTC分布的影响提供支撑.
通常采用1.50~10.00 s 的TTC 值进行潜在冲突风险评估研究,但TTC阈值[9-10]及划分标准[10-11]不完全统一.Nobukawa 等[9]选择10.00 s 作为TTC 阈值分析高速公路变道场景中大型卡车驾驶员的后向间隙接受特性.Hirst 等[10]选择10.00 s 作为TTC阈值,认为TTC在0.00~1.00 s 内为高风险,1.00~3.00 s 内为低风险.Pirinccioglu 等[11]将TTC 值介于0.00~1.00 s定义为高风险,1.00~1.50 s定义为中等风险,1.50~2.00 s 定义为低风险.本文将TTC 在0.00~1.00 s划分为高风险,1.00~3.00 s划分为低风险.基于WIM 获取特定地点融合荷载特性的交通流数据,分析车辆类型,车辆类型和超重,车辆类型和超速3 种12 类典型跟驰场景下TTC 分布规律,利用Kolmogorov Smirnov(KS)检验对比不同跟驰场景下TTC 分布的差异性,计算不同跟驰场景下TTC 分布特征值,为车辆避撞系统风险评估指标的优化提供科学依据.
1 研究方法
1.1 跟驰场景分解
公安部、交通部联合公布的《车辆超限超载认定标准》[12]基于车辆轴数将车辆分为5 类,不同车辆类型限重如表1 所示.基于车辆类型划分标准,将车辆类型分为四轴及以上车辆,三轴及以下车辆,并分别定义为重车、轻车.实际装载货物质量过高,使总车重或轴重超过规范要求的车辆定义为超重车辆.车辆荷载特性通过车辆类型结合超重和超速进行划分.

表1 不同车辆类型的限重Table 1 Vehicle classification and gross vehicle weight limits
将前后车车头时距介于0.00~5.00 s 的场景定义为跟驰场景,选其中介于0.00~10.00 s的TTC值为研究对象,表2~表4 为跟驰场景代码.其中,L代表前车的荷载特性,F代表后车的荷载特性;下标:h 代表重车,l 代表轻车,y 代表超重,n 代表不超重,s 代表超速,w 代表不超速.以车辆类型、超重和超速等指标量化表征车辆荷载特性,分解前后车辆不同荷载特性组合的12 类跟驰场景,并选取样本量充足的跟驰场景进行分析.

表2 考虑车辆类型的跟驰场景代码Table 2 Scenario code considering vehicle classes
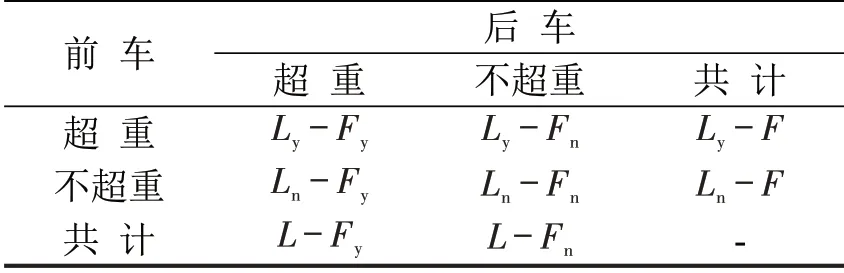
表3 考虑超重的跟驰场景代码Table 3 Scenario code considering overweight

表4 考虑超速的跟驰场景代码Table 4 Scenario code considering speeding
1.2 数据分析方法
基于以下标准预处理WIM数据:
(1)轴数介于2~6轴.
(2)车辆总重不小于3.50 t.
(3)单轴轴重介于0.20~30.00 t,总车重为各轴轴重总和.
(4)单轴轴距介于0.60~20.00 m,车长为各轴轴长总和.
(5)车速介于60 km/h 至高速公路限速修正值vmax之间.vmax计算公式为

式中:vmax为高速公路限速修正值;v为高速公路限速值;f为修正系数,通常取值为1.30~1.50,本文取值为1.40[13].
分析荷载特性(包括车辆类型、超重、超速等)对TTC(介于0.00~10.00 s 范围内的TTC 值)的影响.后车速度大于前车时,TTC计算公式为

式中:ETTC,i为车辆i的TTC 值;Eht,i为车辆i与车辆i-1 之间的车头时距;li-1为车辆i-1 的长度;xi、xi-1分别为车辆i、i-1 的位置;vi、vi-1分别为车辆i、i-1的速度.
利用KS测试研究前后车的车辆类型、超重和超速影响下的TTC 分布的显著性差异,建立不同跟驰场景下TTC 统计分布的特征值(即高风险和低风险的比例).本文将TTC值上界设定为10.00 s,TTC值在0.00~1.00 s定义为高风险,1.00~3.00 s定义为低风险.
2 实证分析与结果讨论
2.1 WIM数据
表5 为我国高速公路不同车辆类型的交通流和荷载特性WIM实测数据汇总情况.
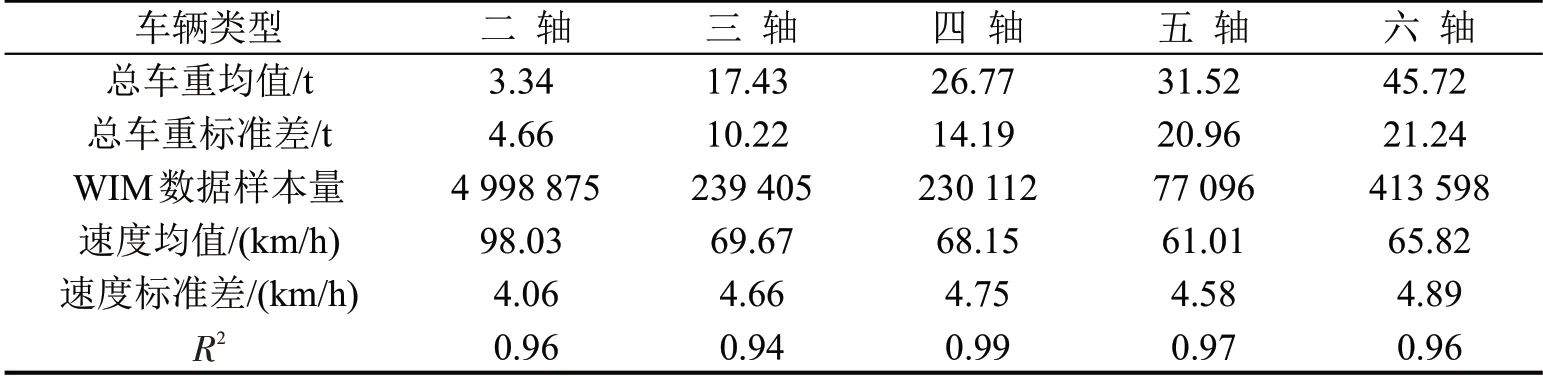
表5 不同车辆类型的交通流和荷载特性汇总Table 5 Summary of traffic count and vehicle load characteristics by vehicle classes
(1)A 高速公路在2009年为双向4 车道,2013年扩建为双向8 车道,限速均为120 km/h.WIM 数据分别观测于2009年4月1~30日(30 d),以及2013年7月24日~2014年1月6日(47 d).2009年调查共记录了640 664 veh的WIM数据,2013年调查共记录了1 875 504 veh 的WIM 数据.其中,2009年调查共记录12 541 组跟驰样本,2013年调查共记录15 778组跟驰样本.
(2)B 高速公路为双向8 车道,限速120 km/h.于2013年10月14日~2014年10月20日进行了观察性调查.为期190 d的调查中,共记录3 490 153 veh的WIM数据,共计20 238组跟驰样本.
(3)C 高速公路为双向6 车道,限速100 km/h.于2013年1月1~30日,进行为期21 d的调查,共记录139 729 veh 的WIM 数据,其中,有988 组跟驰样本.
为排除缺失数据的影响,选择具有完整交通流特性的WIM 数据,共有5 959 086 条,有效率达96.96%,其中,有49 545组跟驰样本.
表6 和表7 分别为考虑车辆类型,车辆类型、超重和超速的跟驰场景样本量,表8和表9分别为考虑车辆类型和超重,考虑车辆类型和超速的跟驰场景TTC分布.
轻车跟驰轻车场景样本量为35 526,比其他跟驰场景样本量大;不超重轻车跟驰不超重轻车场景,不超速轻车跟驰不超速轻车场景样本量分别为34 244和32 921,远高于其他场景样本量.因此,利用TTC的累积频率分布消除样本量的干扰.
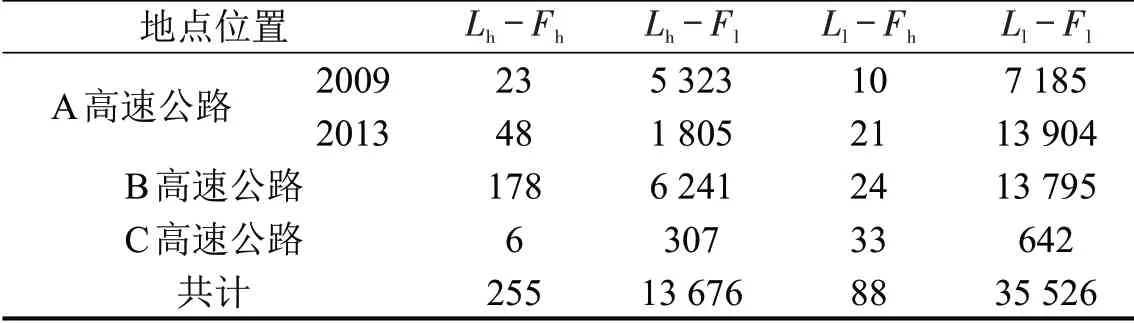
表6 考虑车辆类型的跟驰场景样本量Table 6 Number of observations considering vehicle classes
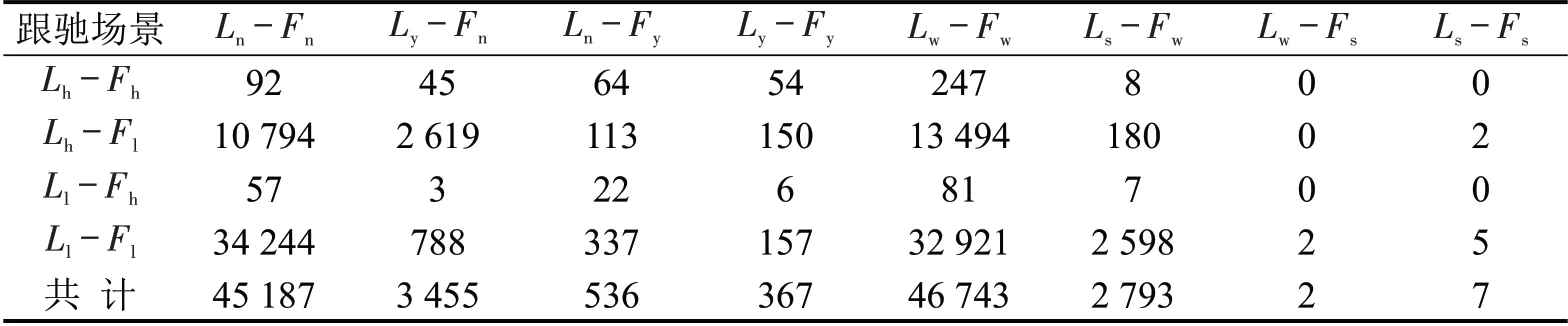
表7 考虑车辆类型、超重和超速的跟驰场景样本量Table 7 Sample sizes of scenarios considering vehicle classes,overweight and speeding

表8 考虑车辆类型和超重的跟驰场景TTC 样本数分布Table 8 TTC distribution of scenarios considering vehicle classes and overweight
2.2 考虑车辆类型的TTC分布
Lh-Fh跟驰场景高风险样本量(0),低风险样本量(5,占比1.96%),Ll-Fh跟驰场景样本量(88)较小,故选取样本量充足的Lh-Fl、Ll-Fl跟驰场景进行研究.图1 为考虑车辆类型的跟驰场景的TTC 分布.表10 表明考虑车辆类型的TTC 分布拟合模型服从指数分布,且拟合优度均大于0.90.当后车为轻车时,Lh-Fl跟驰场景(即前车为重车)的TTC 值低于Ll-Fl跟驰场景(即前车为轻车),Lh-Fl跟驰场景潜在冲突风险更大.
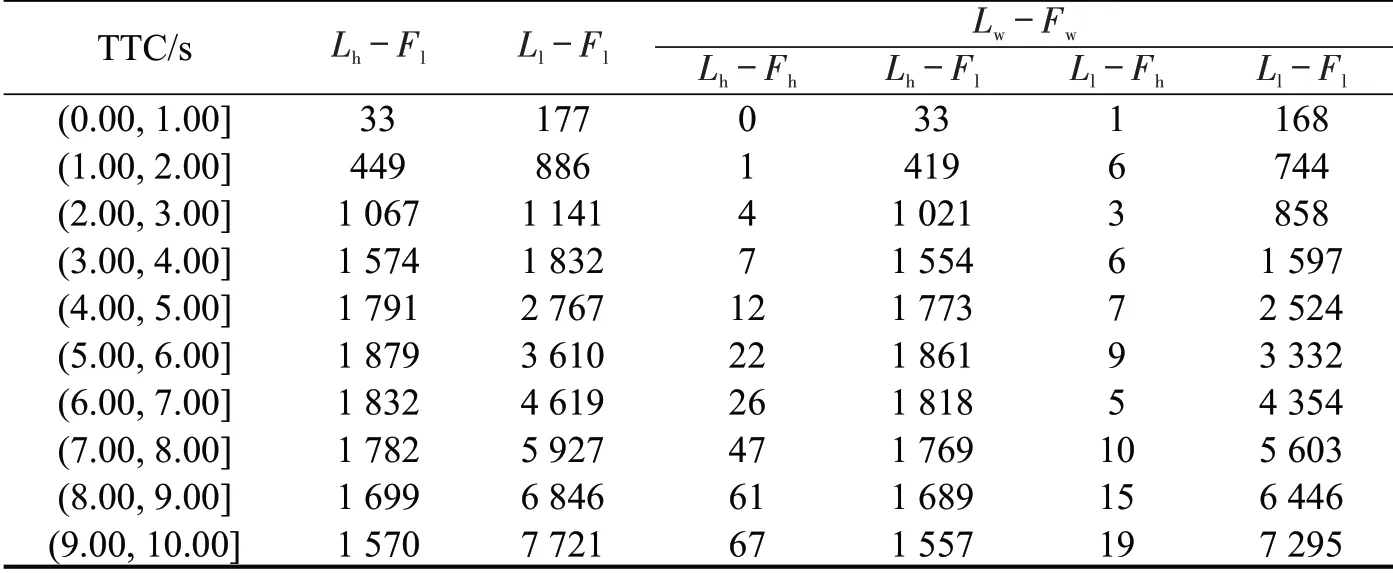
表9 考虑车辆类型和超速的跟驰场景TTC 样本数分布Table 9 TTC distribution of scenarios considering vehicle classes and speeding
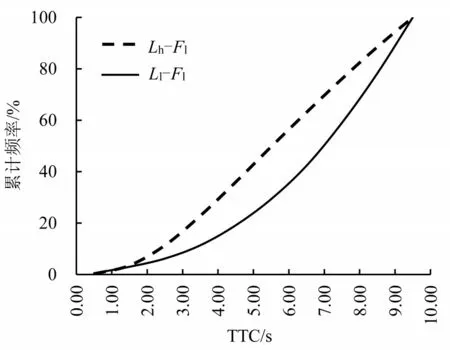
图1 考虑车辆类型的TTC 分布Fig.1 TTC distributions with respect to vehicle classes
由表11 可知,轻车跟驰重车TTC 值为高风险与低风险的比例为0.24%和11.09%,高于轻车跟驰轻车的高风险与低风险的比例(分别为0.50%和5.71%).Lh-Fl跟驰场景的高风险与低风险场景的前后车平均速度差(分别为42.55 和36.90)高于Ll-Fl跟驰场景(分别为37.37和32.00).这表明,轻车跟驰重车比轻车跟驰轻车的平均速度差与基于TTC 的潜在冲突风险更大.另外,在5%置信度水平上,KS 检验结果表明,Ll-Fl、Lh-Fl不同车辆类型跟驰场景TTC的分布不存在显著差异性.

表10 考虑荷载特性的TTC 分布模型Table 10 Model of TTC distributions with respect to load characteristics
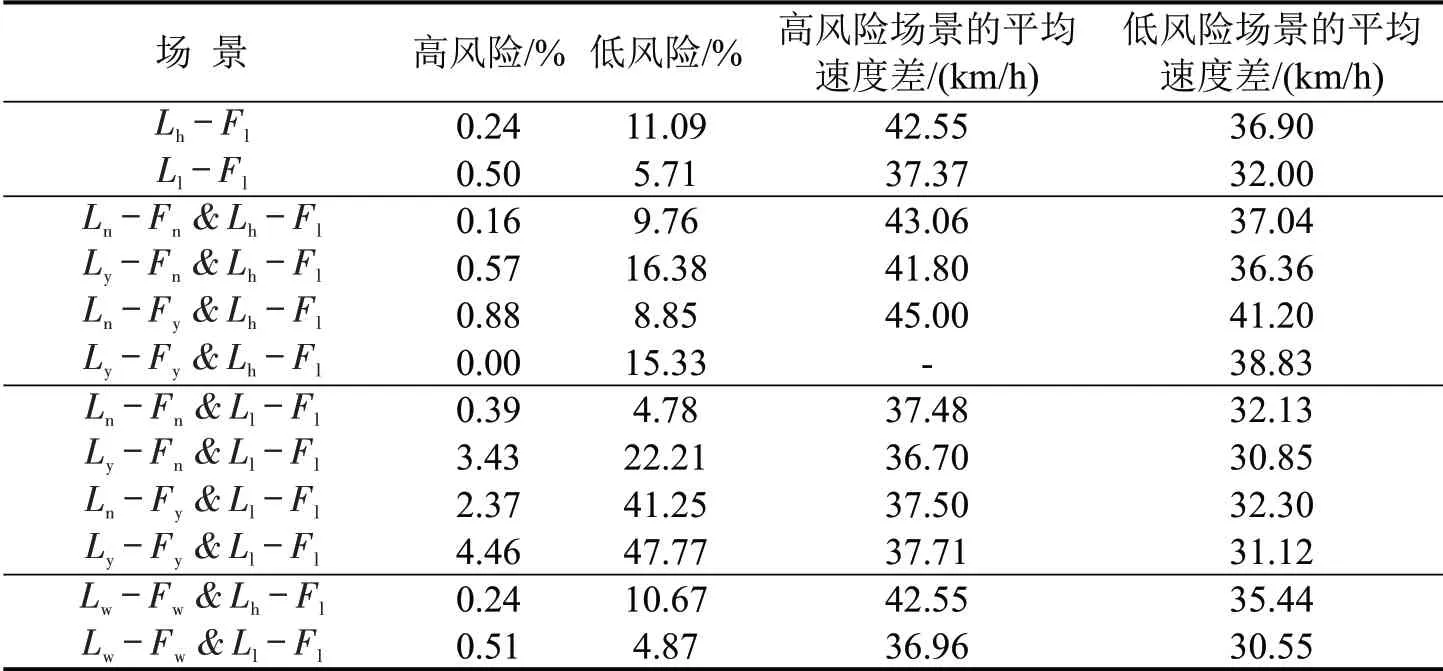
表11 考虑车辆类型的高风险与低风险比例Table 11 Proportion of high risk and low risk considering vehicle classes
2.3 考虑超重的TTC分布
图2为考虑车辆类型和超重Lh-Fl、Ll-Fl跟驰场景的TTC 分布.表10 表明考虑车辆类型和超重的TTC 分布拟合模型服从指数分布,且拟合优度均大于0.80.在5%置信度水平上,KS 检验结果表明,当轻车跟驰轻车(Ll-Fl)时,Ly-F&yLl-Fl前后车均超重跟驰场景的TTC分布与Ll-Fl跟驰场景TTC 分布存在显著性差异,说明前后车为超重轻车显著增加潜在冲突风险;其他跟驰场景的TTC分布不存在显著性差异.

图2 考虑车辆类型与超重的TTC 分布Fig.2 TTC distributions with respect to vehicle classes and overweight
表11表明,就轻车跟驰重车场景而言,仅前车重车超重场景Ly-Fn&Lh-Fl的高风险和低风险比例分别为0.57%和16.38%,远大于仅后车轻车超重场景Ln-Fn&Ll-Fl的高风险和低风险比例(分别为0.88%和8.85%).就轻车跟驰轻车场景而言,前后车均超重场景Ly-Fy&Ll-Fl的高风险和低风险比例分别为4.46%和47.77%,远大于前后车都不超重场景Ln-Fn&Ll-Fl的高风险和低风险比例(分别为0.39%和4.78%).结果表明,车辆的超重增加轻车跟驰重车、轻车跟驰轻车场景的潜在冲突风险,超重车辆导致视距和加减速制动性能都变差.
2.4 考虑超速的TTC分布
Lw-Fs、Ls-Fs跟驰场景样本量分别为2、7,Ls-Fw&Lh-Fh、Ls-Fw&Lh-Fl、Ls-Fw&Ll-Fh、Ls-Fw&Ll-Fl跟驰场景高风险样本量分别为0、0、0、9,故选取样本量充足的轻车跟驰重车均不超速Lw-Fw&Lh-Fl,轻车跟驰重车均不超速Lw-Fw&Ll-Fl跟驰场景进行研究.图3 为考虑车辆类型和超速Lh-Fl、Ll-Fl跟驰场景的TTC 分布.KS检验结果表明,前后车均不超速对跟驰场景TTC分布不存在显著性影响.表10表明,考虑车辆类型和超速的TTC 分布拟合模型服从指数分布,且拟合优度均大于0.90.
表11表明,Lh-Fl、Ll-Fl跟驰场景高风险比例分别为0.24%和0.50%,不超速Lw-Fw下Lh-Fl、Ll-Fl跟驰场景高风险比例分别为0.24%和0.51%,两者差别不大;但Lh-Fl、Ll-Fl跟驰场景低风险比例分别为11.09%和5.71%,不超速Lw-Fw下Lh-Fl、Ll-Fl跟驰场景低风险比例分别为10.67%和4.87%.前后车不超速跟驰场景的低风险比例低于不考虑超速与否低风险比例.不超速场景下,轻车跟驰重车的风险比例高于轻车跟驰轻车.
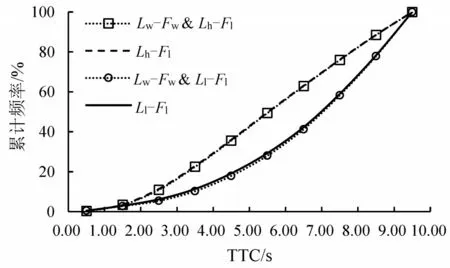
图3 考虑车辆类型和超速的TTC 分布Fig.3 TTC distributions with respect to vehicle classes and speeding
3 结 论
本文基于WIM 技术采集融合荷载特性的交通流数据,分析前后车辆不同荷载特性组合的自由流交通状态下12 类跟驰场景TTC 分布,结果表明:TTC 累计频率分布服从指数模型;在5%置信度水平上,KS检验前后车车辆类型对TTC分布无显著影响,前后车为超重轻车显著增加潜在冲突风险;超重增加轻车跟驰重车、轻车跟驰轻车场景的潜在冲突风险;前后车不超速跟驰场景下,轻车跟驰重车的风险比例高于轻车跟驰轻车.不同车辆荷载特性跟驰场景,潜在冲突风险TTC 阈值具有差异性,同时潜在冲突风险可将车辆荷载特性融入TTC值.分析结果仅限于自由流交通状态,后续研究可扩展到拥挤和堵塞交通流状态,不同服务水平条件下考虑荷载特性的TTC分布分析.
猜你喜欢
核安全(2022年2期)2022-05-05 06:55:32
内蒙古统计(2021年4期)2021-12-06 02:49:20
中国民间疗法(2021年18期)2021-11-02 08:20:26
铁道车辆(2021年1期)2021-08-30 02:53:40
测控技术(2018年4期)2018-11-25 09:46:52
上海精神医学(2017年5期)2017-11-29 06:03:10
外语教学理论与实践(2016年1期)2016-06-11 05:51:40
机械工程师(2014年9期)2014-07-08 02:16:22
河南科技(2014年12期)2014-02-27 14:10:40
法人(2014年4期)2014-02-27 10:44:17