
动车组制动系统空重车的设置
2021-08-30 02:53赛华松路金昌
铁道车辆 2021年1期
赛华松,路金昌,陈 旭,刘 振
(中车青岛四方车辆研究所有限公司 制动事业部,山东 青岛 266031)
动车组在正常进站或紧急情况下需要通过制动系统施加制动控制列车降低速度直至停车,制动系统控制列车停车的方式一般分为常用制动和紧急制动。
正常情况下,动车组采用常用制动方式减速停车,微机控制的直通式电空制动系统根据压力传感器传送的对应车辆载荷的空气弹簧压力信号,并结合减速度要求等信息计算出所需要的预控制压力,通过电信号控制电空转换阀产生对应不同车辆载荷的预控制压力,并进一步通过中继阀以及基础制动装置产生对应的制动力。
紧急情况下,动车组采用紧急制动方式减速停车,制动系统根据空气弹簧压力,通过空重车调整阀的机械机构产生对应不同车辆的预控制压力,进一步通过中继阀以及基础制动装置产生对应的制动力。
紧急制动时,常用制动预控制压力通路会同时施加一个与紧急制动相当的常用制动预控制压力,作为冗余。
当空气弹簧压力异常(低于理论最小值或高于理论最大值)时,为确保列车的安全制动距离,制动系统根据预设的车辆载荷Td(一般为定员载荷)进行制动力的控制。
1 空重车控制基本原理
根据牛顿第二运动定律(公式(1)),为保证车辆在不同载荷条件下制动效果的一致性,制动系统应根据车辆载荷变化自动调整制动力,以确保车辆在不同载荷条件下的减速度基本一致。
F=ma
(1)
式中:F——制动力;
m——车辆载荷;
a——减速度。
因载荷变化造成列车总质量发生变化的车辆通常称为空重车。通过压力传感器和电空转换阀进行空重车控制的方式,业内的设置方式基本相同,在此不再详细讨论。本文主要对通过空重车调整阀进行空重车控制的方式进行分析研究。
2 空重车设置
2.1 空重车调整阀特性
空重车调整阀有3个气路接口:预控制压力输入口、预控制压力输出口、空气弹簧压力输入口。
图1为空重车调整阀原理图。
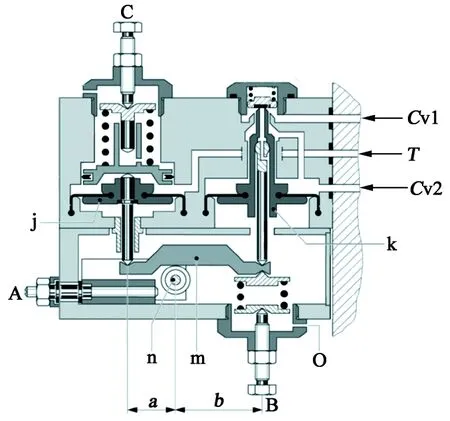
Cv1、Cv2.预控制压力;T.空气弹簧压力;j、k.活塞;O.排气口;B、C.调整螺钉;a、b.杠杆臂长;m.杠杆;n.杠杆支点;A.调整螺栓。
图2为空重车调整阀的特性曲线,其中实线为通过空重车调整阀输出的预控制压力最高限定值Cv2max与空气弹簧压力T的变化曲线,该曲线分为两段:(1)当T≤Tmin时,Cv2max=Pmin;(2)当T>Tmin时,Cv2max=k·T+P0。
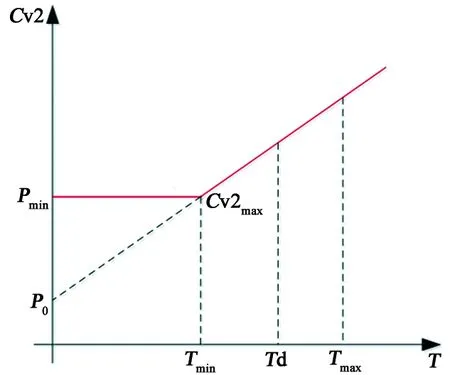
图2 空重车调整阀特性曲线
一般Tmin为车辆空载时空气弹簧的压力值,由调整螺钉C设置;k为空重车调整阀的比例系数,由活塞(j和k)的面积比率以及杠杆(m)的臂长a和b的比值调整;P0为斜线延伸至T=0时在Cv2轴上的截距,由调整螺钉B调整。
另外,空重车调整阀输入输出的预控制压力还有以下特性:(1)当Cv1≤Cv2max时,Cv2=Cv1;(2)当Cv1>Cv2max时,Cv2=Cv2max。
2.2 空重车设置方式一
图3为某型动车组采用的空重车设置方式一的制动控制气路原理图。由图3可知,常用制动时,制动风缸压力R1通过电空转换阀生成预控制压力Cv1,通过紧急电磁阀,再通过空重车调整阀生成预控制压力Cv2,进入中继阀;紧急制动时,制动风缸压力R1通过紧急电磁阀,再通过空重车调整阀生成预控制压力Cv2,进入中继阀。
空重车调整阀设置在常用制动和紧急制动预控制压力汇合之后。在空气弹簧压力正常情况下,根据空气弹簧压力实际值限制常用和紧急制动预控制压力的最高值;在空气弹簧破裂时,按照预设的模拟空气弹簧压力值(空载时的空气弹簧压力值)限制两路预控制压力的最高值。

.01.电空转换阀;.02.紧急电磁阀;.03.空重车调整阀;.04.中继阀;.05.切换阀;.06.双向阀;
2.3 空重车设置方式二
图4为某型动车组采用的空重车设置方式二的制动控制气路原理图。常用制动时,制动风缸压力R通过减压阀、电空转换阀生成压力Cv1,通过紧急电磁阀进入中继阀;紧急制动时,制动风缸压力R通过空重车调整阀生成预控制压力Cv2,再通过紧急电磁阀进入中继阀。
与空重车设置方式一的区别在于常用制动通路预控制压力Cv1不通过空重车调整阀。
空重车调整阀设置在紧急制动预控制压力通路,常用制动和紧急制动预控制压力汇合之前。在空气弹簧压力正常情况下,根据空气弹簧压力实际值限制紧急制动通路预控制压力的最高值;在空气弹簧破裂时,按照预设的模拟空气弹簧压力值限制紧急制动通路预控制压力的最高值。
此种设计,常用制动通路预控制压力不受空重车调整阀限制,由减压阀限制最高值。
2.4 2种空重车设置方式的比较
针对不同车辆载荷(即空气弹簧压力T)工况,对2种空重车设置方式的控制效果进行比较分析。

.01.电空转换阀;.02.紧急电磁阀;.03.空重车调整阀;.04.中继阀;.05.切换阀;.06.调压阀;
2.4.1 空气弹簧压力正常(Tmin≤T≤Tmax)工况
空重车设置方式一和空重车设置方式二控制效果相同。
常用制动时,由电空转换阀控制产生对应车辆载荷(T)的预控制压力Cv1,不受空重车调整阀限制,此时Cv1≤Cv2max,Cv2=Cv1。
紧急制动时,预控制压力Cv1与总风压力相当,受空重车调整阀限制,此时Cv1>Cv2max,Cv2=Cv2max=k·T+P0。
常用制动和紧急制动时,预控制压力均能达到规定值。
2.4.2 空气弹簧压力异常(T (1) 空重车设置方式一和空重车设置方式二紧急制动控制效果相同。 Cv1与总风压力相当,Cv1>Cv2max,预控制压力受空重车调整阀限制,Cv2=Cv2max=Pmin。 (2) 空重车设置方式一和空重车设置方式二常用制动控制通路效果不同。 空重车设置方式一:常用制动时,由电空转换阀控制产生对应预设车辆载荷(Td)的预控制压力Cv1,此时Cv1≈k·Td+P0,Cv2max=Pmin,因此Cv1>Cv2max,预控制压力受空重车调整阀限制,Cv2=Cv2max=Pmin,其中Td为预设空气弹簧压力(Tmin 空重车设置方式二:常用制动时,由电空转换阀控制产生对应预设车辆载荷(Td)的预控制压力Cv1,Cv1≈k·Td+P0。 如果车辆实际载荷高于空载时,仅空重车设置方式二常用制动通路能达到与车重对应的预控制压力。 2.4.3 空气弹簧压力异常(T>Tmax)工况 (1) 空重车设置方式一和空重车设置方式二紧急制动控制通路效果相同。Cv1与总风压力相当,受空重车调整阀限制,此时Cv1>Cv2max,Cv2=Cv2max=k·T+P0。 (2) 空重车设置方式一和空重车设置方式二常用制动控制通路效果不同。 空重车设置方式一:常用制动时,由电空转换阀控制产生对应Td的预控制压力Cv1,此时Cv1≈k·Td+P0,Cv2max=k·T+P0,因此Cv1≤Cv2max,预控制压力不受空重车调整阀限制,Cv2=Cv1。 空重车设置方式二:常用制动时,由电空转换阀控制产生对应Td的预控制压力Cv1,Cv1≈k·Td+P0。 常用制动和紧急制动时,预控制压力均能达到规定值。 通过以上分析可知: (1) 空气弹簧压力T≥Tmin时,2种空重车设置方式均能达到预定的控制压力。 (2) 空气弹簧压力T 图5为一种新型的制动控制气路原理图,常用制动时,制动风缸压力R通过减压阀、电空转换阀生成预控制压力Cv1,进入中继阀;紧急制动时,制动风缸压力R通过空重车调整阀生成预控制压力Cv2,再通过紧急电磁阀进入中继阀。 .01.电空转换阀;.02.紧急电磁阀;.03.空重车调整阀;.04.中继阀;.05.切换阀;.06.减压阀; 中继阀具备2个预控制压力输入口,常用制动通路和紧急制动通路的预控制压力分别进入中继阀的2个预控制压力输入口,中继阀取两路预控制压力之大者控制输出控制压力。 空重车调整阀设置在紧急制动预控制压力通路,主要作用同空重车设置方式二。此种设计中,常用制动通路预控制压力不受空重车调整阀限制,由减压阀限制其最高值。 3.2.1 空气弹簧压力正常(Tmin≤T≤Tmax)工况 常用制动时,由电空转换阀控制产生对应车辆载荷(T)的预控制压力Cv1≈k·T+P0。 紧急制动时,预控制压力Cv1与总风压力相当,此时Cv1>Cv2max,预控制压力受空重车调整阀限制,Cv2=Cv2max=k·T+P0。 常用制动和紧急制动时,预控制压力均能达到规定值。 3.2.2 空气弹簧压力异常(T 常用制动时,预控制压力Cv1≈k·Td+P0。 紧急制动时,预控压力Cv1与总风压力相当,此时Cv1>Cv2max,预控制压力受空重车调整阀限制,Cv2=Cv2max=Pmin。 如果车辆实际载荷高于空载时,中继阀取两路预控制压力大者控制输出控制压力,故该空重车设置方式能达到与车重对应的预控制压力。 3.2.3 空气弹簧压力异常(T>Tmax)工况 常用制动时,预控制压力Cv1≈k·Td+P0。 紧急制动时,预控制压力Cv1与总风压力相当,此时Cv1>Cv2max,预控制压力受空重车调整阀限制,Cv2=Cv2max=k·T+P0。 由于中继阀取两路预控制压力大者控制输出控制压力,故该空重车设置方式能达到与车重对应的预控制压力。 (1) 本文提出的空重车设置方式中,空重车调整阀只限制紧急制动通路的预控制压力,常用制动通路在各种工况下均能达到设计的预控制压力。 (2) 紧急制动通路预控制压力受空重车调整阀限制,在载荷异常时(特别是T (3) 由于采用具备双预控的中继阀,因此在紧急制动时,虽然紧急制动通路预控制压力无法达到规定值,冗余的常用制动通路预控制压力可以替代达到规定值。 采用此种设计可以确保在各种工况下,车辆均能达到设计的制动力,对于动车组的安全制动是有益的。 制动系统作为确保列车行驶安全的最后一道安全屏障,设计时需特别关注重要功能的冗余性和安全性。本文通过对动车组制动系统中空重车的不同设置对常用制动和紧急制动效果的影响分析,提出了一种新的空重车设置方式,对制动系统空重车的设置具有指导意义。2.5 2种空重车设置方式分析
3 一种新型空重车设置方式

3.1 控制原理
3.2 工况分析
3.3 新型空重车设置方式优点
4 结论
猜你喜欢
模具制造(2022年1期)2022-02-23今日农业(2021年14期)2021-11-25中学生数理化(高中版.高考理化)(2021年1期)2021-03-19意林(2020年10期)2020-06-01无线电通信技术(2020年1期)2020-01-15无线电通信技术(2019年1期)2019-12-24证券市场红周刊(2018年5期)2018-05-14新高考·高一物理(2016年10期)2017-07-07中国科技纵横(2016年14期)2016-10-10现代计算机(2016年35期)2016-02-13
