跳跃机器人弹跳机构的设计
2020-10-31 04:20徐翰乔
机械制造 2020年10期
□ 秦 楠 □ 徐翰乔
大连科技学院 机械工程学院 辽宁大连 116052
1 设计背景
近年来,对机器人进行研究已经成为智能研究领域的热点。轮式和履带驱动的机器人只能在平坦地形上工作[1-2],步行和爬行机器人只具有一种直线爬行步态,应对较高障碍物或沟渠能力较弱[3-4]。跳跃机器人能够跳跃越过障碍物和地面沟渠,可以弥补只能在平坦地形上工作的机器人的缺陷,满足通过较高障碍物或沟渠地形的功能要求[5-6]。笔者对跳跃机器人弹跳机构进行设计。
2 设计方案
跳跃机器人弹跳机构采用间歇跳跃方式,通过机械和弹簧储存能量。储存的能量释放时,能带动整个机器人跳跃到空中,并通过缺齿齿轮作用完成周期性跳跃。
3 工作原理
跳跃机器人弹跳机构由弹簧储能装置和中间连杆装置组成,由电机带动缺齿齿轮、弹簧完成跳跃动作。当直齿轮与缺齿齿轮啮合时,与直齿轮同轴的带轮也产生转动,连接在带轮上的钢丝绳越来越短,机构的上台板会沿着两根圆柱杆向下运动,从而使四根连杆位置发生变化,使弹簧产生拉伸变形储备弹性势能。当直齿轮脱离缺齿齿轮时,弹簧由拉伸状态开始剧烈收缩,通过连杆传递作用力至上台板,使上台板向上做加速运动,释放弹簧的弹性势能,完成跳跃机器人的跳跃动作。整个跳跃机器人在缺齿齿轮的作用下实现连续间歇跳跃动作。所设计的跳跃机器人弹跳机构如图1所示。

▲图1 跳跃机器人弹跳机构
为了达到控制弹跳机构能量释放的目的,采用缺齿齿轮结构。当两个齿轮处于啮合状态时,弹跳机构处于蓄能状态。当缺齿齿轮转到缺齿的位置时,直齿轮与缺齿齿轮脱离啮合状态,不再啮合。此时,控制弹簧处于拉伸变形状态的力会消失,弹簧恢复到原来保持弹跳机构平衡的状态,在这个过程中会给连杆一个向内运动的力,同时使上台板沿着两根圆柱杆向上运动,从而带动整个弹跳机构向上运动,完成跳跃机器人的跳跃动作。
采用电动机两端带动两个齿轮传动的设计方案,如图2所示。
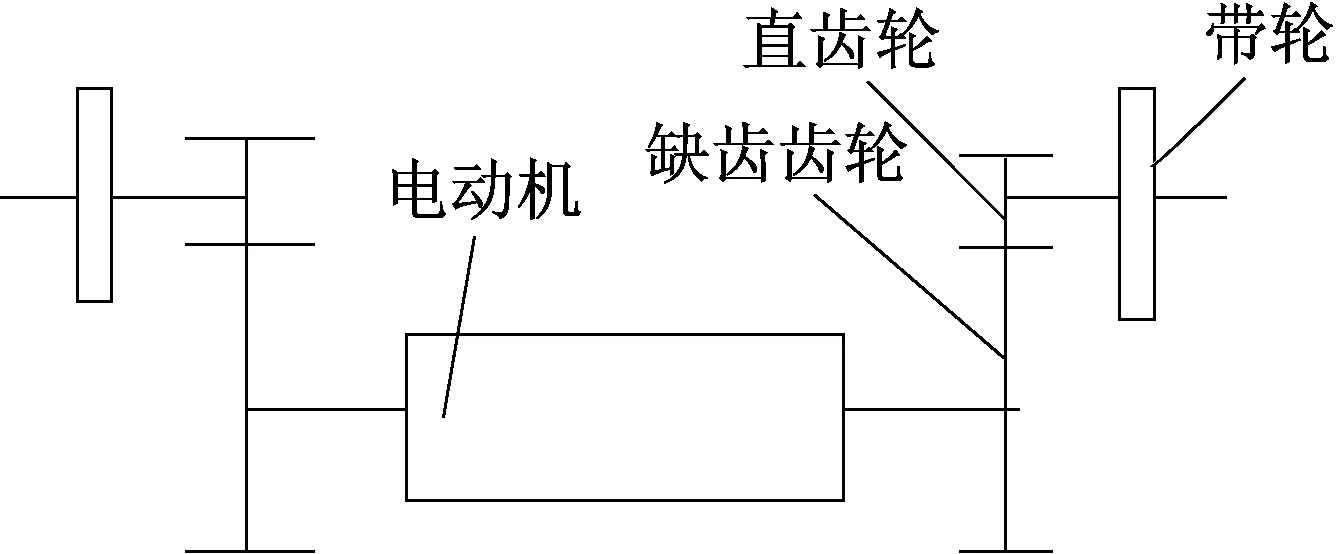
▲图2 齿轮传动设计方案
在电动机两端伸出两根轴,动力通过两对缺齿齿轮与直齿轮传递到带轮上。在带轮上缠有钢丝绳,与上台板连接在一起。当电动机转动时,两对齿轮啮合传动,传动轴带动带轮转动,两端钢丝绳同时带动上台板下移。这一设计方案可以使钢丝绳受力方向保持竖直,能够更好地保持弹跳机构的平衡。
4 参数计算
基于跳跃机器人弹跳机构的结构和弹跳过程,对弹跳机构进行参数计算。建立跳跃机器人计算模型,如图3所示。
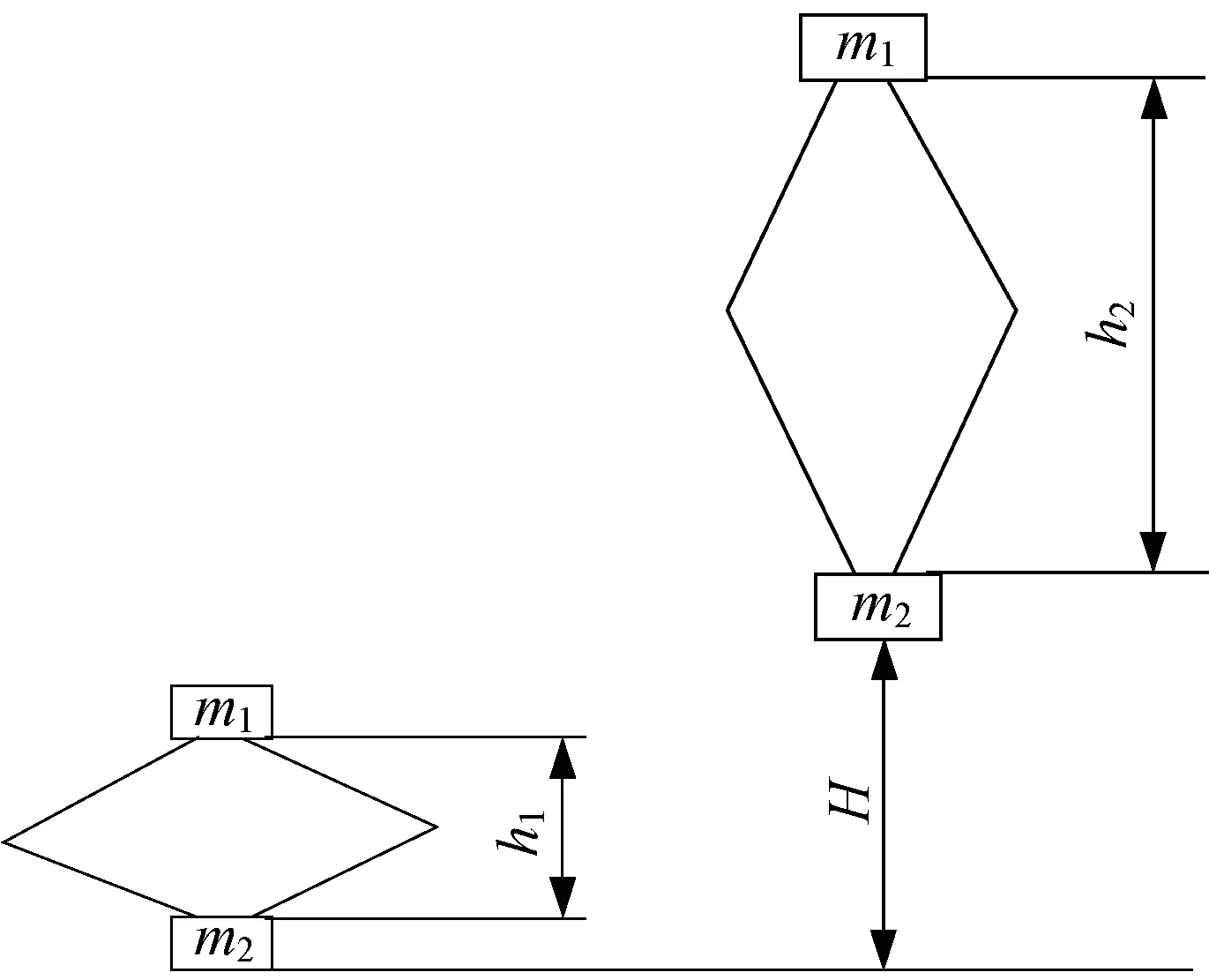
▲图3 跳跃机器人计算模型
整个跳跃机构在起跳前和起跳后系统总能量保持不变,于是有:
m1gh1+k(Δx)2η/2=m1g(H+h2)+m2gH
(1)
式中:m1为上滑块质量,m1=0.5 kg;m2为下滑块质量,m2=1.65 kg;H为跳跃高度,H=1 000 mm;h1为弹簧储能装置释放前四连杆机构的高度,h1=75 mm;h2为弹簧储能装置释放后四连杆机构的高度,h2=190 mm;k为弹簧系数;Δx为弹簧理论伸长量,Δx=97 mm;η为弹簧效率,η=0.9。
代入数值对式(1)进行计算,可以得到弹簧系数为5.1 N/mm。由于弹跳机构中采用双弹簧,由此实际弹簧系数为2.55 N/mm。
对弹簧进行线性计算,有:
Fmax=k(Δx+10)
(2)
式中:Fmax为弹簧最大载荷。
对式(2)进行计算可以得到弹簧所承受的最大载荷为272.85 N。通过对弹簧工作载荷进行分析,弹跳机构弹簧属于Ⅲ类载荷弹簧,拉簧型式采用LⅢ型。笔者选用碳素弹簧钢丝,材料的许用剪切应力[τ]为760 MPa。
弹簧钢丝曲度因数K为:
(3)
式中:C为旋绕比。
弹簧钢丝直径d为:
(4)
初步选定C为8,根据式(3)计算得到曲度因数为1.18。由式(4)计算得到弹簧钢丝直径为2.95 mm,取标准值为3 mm。弹簧主要尺寸参数见表1。

表1 弹簧主要尺寸参数
弹簧有效工作圈数N为:
(5)
式中:G为弹簧材料切变模量,G=79 000 MPa。
由式(5)计算得到弹簧有效工作圈数为20.57,取21。考虑两端并紧一圈,则总圈数N1为23。
弹簧为拉伸弹簧,于是有:
F=Fmax/n
(6)
式中:F为弹簧极限载荷;n为安全因数,n=0.8。
由式(6)计算得到弹簧极限载荷为341.06 N。由于弹簧圈数由20.57调整为23,因此弹簧的伸长量与弹簧极限载荷也有相应调整。弹簧伸长量λ为:
(7)
由式(7)计算得到弹簧伸长量为135.57 mm。
弹簧节距p为:
p=d+λ/N1+δ
(8)
式中:δ为弹簧相邻两圈的间距。
在弹簧极限载荷作用下,弹簧相邻两圈的间距不小于弹簧钢丝直径的1/10,取2 mm,则由式(8)计算得到无载荷作用下节距为10.89 mn。
弹簧自由长度L0为:
L0=N1p+1.5d
(9)
由式(9)计算得到弹簧自由长度为254.97 mm,取255 mm。
弹簧螺旋升角γ为:
(10)
由式(10)计算得到无载荷作用下弹簧螺旋升角为8.22°,满足螺旋升角在5°~9°范围内的要求。
弹簧钢丝展开长度L为:
L=πD2N1/cosγ
(11)
由式(11)计算得弹簧钢丝展开长度为1 751.27 mm。
弹簧刚度Kp为:
(12)
由式(12)计算得到当弹簧总圈数为23时,弹簧刚度为1.77 N/mm。
稳定性b为:
b=L0/D2
(13)
弹簧采用两端固定支座,由式(13)计算得到弹簧稳定性为10.625,大于5.3,因此需要对弹簧进行稳定性验算:
Fc=CuKpL0>F
(14)
式中:Fc为稳定时的临界载荷;Cu为不稳定因数,Cu=0.03。
对式(14)进行计算,得到弹簧稳定时的临界载荷为13.54 N,小于弹簧极限载荷,因此在进行弹簧结构设计时,必须加装导杆,导杆与弹簧的间隙建议为3~4 mm,用于保证弹簧使用时的稳定性。
5 结束语
跳跃机器人采用跳跃式运动方式前行,具有较强的自主运动能力[7-8]。笔者对跳跃机器人弹跳机构进行了设计,强化了跳跃机器人的地形适应能力,扩大了自主式运动机器人的应用范围[9-10]。由于跳跃机器人涉及机电、控制、动力学、运动学等众多领域,因此未来仍需进行大量工作,在各领域继续深入研究。
猜你喜欢
山东冶金(2022年3期)2022-07-19
小学生学习指导(中年级)(2021年3期)2021-04-06
小学生学习指导(低年级)(2020年9期)2020-11-09
小读者(2020年4期)2020-06-16
山东冶金(2019年5期)2019-11-16
作文大王·低年级(2018年10期)2018-12-06
小学生学习指导(中年级)(2018年9期)2018-11-29
小学生学习指导(高年级)(2017年3期)2017-02-17
中国锰业(2017年4期)2017-01-18
山东工业技术(2016年15期)2016-12-01