农具悬挂角度对履带拖拉机稳定性的影响
2020-10-27 11:30吴赛飞张兴局尚莉丽陈普双许良元
洛阳理工学院学报(自然科学版) 2020年3期
吴赛飞,张兴局,陈 舒,尚莉丽,陈普双,许良元,2,江 庆,2
(1.安徽农业大学 工学院,安徽 合肥 230036;2.安徽省智能农机装备工程实验室,安徽 合肥 230036)
随着履带拖拉机越来越多的应用在丘陵山地中,其稳定性也被逐渐重视起来,履带拖拉机的稳定性得不到提高不仅会极大地降低拖拉机的工作效率,也会对驾驶员的人身安全造成很大的威胁。当履带拖拉机挂接机具后,其在坡道上行驶的稳定性与履带拖拉机空载时又有所不同,履带拖拉机悬挂机具时爬坡稳定性也引起了越来越多的重视。
国外对拖拉机的稳定性有着较为深入的研究,研究了在有滑转滑移的情况下高速以及低速履带的转向稳定性;研究了履带车辆在非直线道路行驶时的稳定性;以是否挂接机具、行驶速度为变量探究影响轮式拖拉机行驶时的转向稳定性[1-5]。我国虽然在研究履带拖拉机方面起步晚但发展迅速。在进行履带拖拉机在坡道的纵行行驶与横向行驶的试验后总结出了影响履带拖拉机行驶稳定性的因素;以农具距离地面的高度为变量探究了轮式拖拉机农具机组的静态纵向稳定性[6-8]。
国内外对履带拖拉机的研究着重考虑了土壤类型以及质心偏移量对履带拖拉机稳定性、平顺性、通过性的影响,而缺少对机具挂接角度对其稳定性影响的研究。本文以某型履带拖拉机为研究对象,采用Solidworks建立履带拖拉机三维模型,采用仿真与试验相结合的方法研究不同农具挂接角度对履带拖拉机爬坡稳定性的影响。
1 材料与方法
1.1 履带拖拉机稳定性测试平台
本文以某型履带拖拉机为试验对象。整机的主要参数:额定功率88.2 kW,外形尺寸4 160 mm×2 540 mm×2 930 mm,履带轨距1 209 mm,离地间隙270 mm,履带接地长度1 550 mm。该文选用IMU560组合惯导系统采集试验数据,该惯导系统能实时输出整机在试验过程中的俯仰角、垂向速度,横滚/俯仰动、静态精度分别为0.1°和0.3°,分辨率小于0.01°,与上位机相连,接收数据。
试验场地选择安徽农业大学校内一处坡度为10°的硬质斜坡路面,拖拉机速度为3.8 km/h,组合惯导系统的安装位置以及与上位机的连接方式如图1所示。

图1 履带拖拉机稳定性测试平台
1.2 虚拟样机模型的建立
在solidworks三维软件中将模型中的螺母、轴、孔、排气装置、发动与传动装置、驾驶室结构等与履带拖拉机的仿真无影响的零部件进行简化,这样可以提高仿真结果的可靠性,同时降低仿真处理的难度。将三维模型保存成X_T格式后导入RecurDyn软件。依据测量的数据在RecurDyn软件中的Track/(LM)模块中建立行走系统,然后与车体、旋耕机进行组装。组装后的整机模型如图2所示。
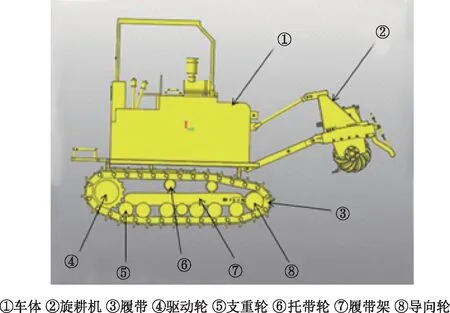
图2 整机模型
在完成履带拖拉机的几何建模后,根据履带拖拉机在实际工作中行走系统各部件之间的关系添加约束,在仿真软件里用运动副进行连接各部件。此仿真模型依据试验样机设置前部驱动,履带拖拉机的驱动函数在行走系统的链轮处进行施加,仿真软件内含多种驱动函数设置,本文试验设置速度函数。
1.3 路面模型的建立
依据试验对不同土壤类型的要求可以在RecurDyn中的Ground模块中建立相关的路面轮廓曲线,然后添加相关路面参数。履带拖拉机与行驶地面之间由于相互接触而产生的力用公式(1)和公式(2)计算。
(1)
P=(kc/b+kφ)Z0n
(2)
式中:Z0表示土壤沉陷量;P表示正压力;kc表示土壤内聚力模量;n表示土壤变形指数;kφ表示内摩擦力模量。
履带拖拉机的行驶动力是通过挤压土壤受到土壤的反作用力获得的,而挤压土壤过程中需要克服土壤的阻力做功,假设接地压力是均匀分布的,则整个做功过程可表示为
(3)
由公式(1)、公式(2)、公式(3)可得第i条履带所做的功为:
(4)
假设第i条履带行驶l,需要克服土壤沉陷阻力R所做的功为
Wi=Ril
(5)
而履带在土壤中沉陷受到的阻力为:
(6)
式中:kc、kφ表示土壤内聚、摩擦的变形模量;n表示土壤变形指数。
试验所需的硬质路面为仿真软件默认类型,而另外3种土壤类型主要参数如表1所示。
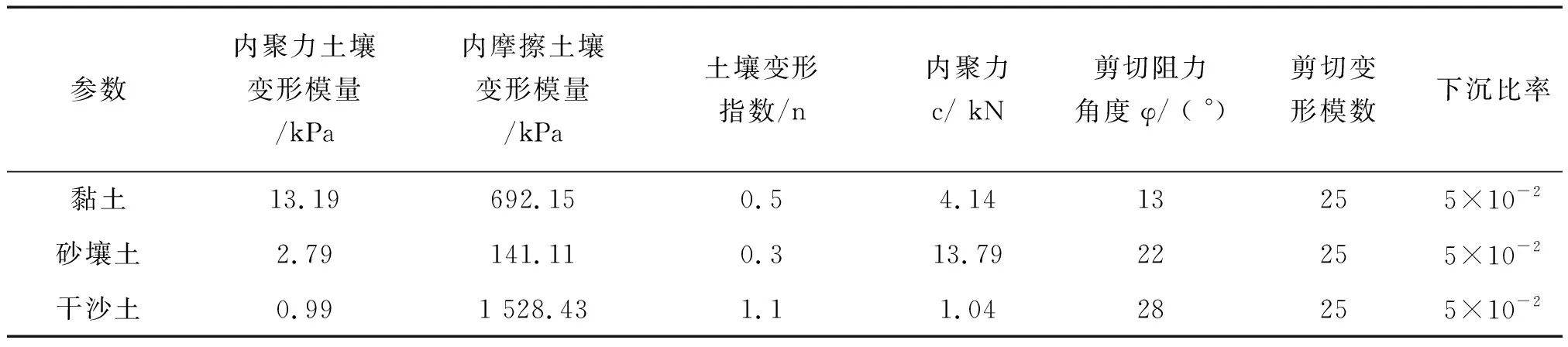
表1 3种土壤参数
1.4 履带拖拉机的静态稳定性
履带拖拉机在坡道行驶的稳定性主要用纵向极限倾翻角αlim和纵向滑移角αφ两个指标来衡量。履带拖拉机在实际工作中在坡地纵向行驶时由于考虑到行驶的安全性大多匀速行驶,所以只对匀速行驶状态进行分析。履带拖拉机匀速行驶时所受空气阻力很小所以此处忽略不计,同时由于履带拖拉机在坡地匀速行驶时的受力状态等同于在坡地静止时的受力状态,此时对履带拖拉机进行受力分析如图3所示。

图3 履带拖拉机纵向上坡行驶
对履带拖拉机进行受力分析知,履带拖拉机的重力G,所受牵引力Fk,支撑面的法向支撑力N,l为地面法向反力支撑点到履带后支撑点的距离,L为履带接地长度,h为履带拖拉机重心到接触面的垂直距离,b为履带拖拉机重心到后支撑点的距离,α为斜坡角度。当履带拖拉机在坡地运动时l=0时为履带拖拉机发生倾翻的临界状态。
此时对B点取距由力矩平衡可得bGcosα-hGsinα-Nl=0
(7)
(8)
Gbcosα-Ghsinα≥0
(9)
由公式(9)可以得出履带拖拉机在坡地不发生倾翻的极限倾翻角可表示为
(10)
当履带拖拉机整机在坡地处于平衡状态时可得平衡方程:
(11)
履带拖拉机在坡道上行驶的最大滑移角取决于履带与坡道之间的附着力,附着力由附着系数决定,设附着系数为δ。则整机附着力为:
Fφ=δN=Gδcosαφ
(12)
要使履带拖拉机在坡道上行驶从而不产生下滑的条件为:
Fφ≥FK
(13)
由公式(11)、公式(12)、公式(13)可得整机在纵向坡道上行驶时发生滑移的最大滑移角
αφ=arctanφ
(14)
2 结果与分析
2.1 试验与仿真结果的比较
由于试验条件限制,该试验只进行了在坡度为10°,悬挂机具角度为23°的硬质路面的爬坡试验以及在砂壤土上不同挂接机具角度的爬坡试验,然后用采集到的试验数据与仿真数据进行比较结果,如图4所示。仿真与试验对比,如表2所示。

表2 砂壤土上悬挂不同机具角度平均俯仰角仿真与试验对比
从图4可以看出,整机爬坡稳定性试验中由于实车试验需要考虑到试验的安全性问题,而虚拟仿真分析时,只需要关注试验本身,由于受到试验场地限制无法进行既定速度下的15 s仿真,只选取了10 s的实车试验数据。在初始阶段由于加速的原因俯仰角的变化曲线波动比较大,在2.5 s加速完成俯仰角的变化曲线波动逐渐趋于稳定,在3.4 s开始进行爬坡试验,由于试验场地坡道起始阶段比较陡峭导致试验中的俯仰角发生了突变,5 s后旋耕机组在坡道行驶状态逐渐稳定,此时俯仰角的变化曲线波动也逐渐稳定。
从表2可知,当选择11°、23°、35°这3种机具挂接角度在砂壤土上进行爬坡试验时23°时平均俯仰角数值更大为-8.31°,而11°与35°时的平均值较为接近分别为-7.76°和-7.75°,这与仿真结果一致,即当机具悬挂角度为23°时整机爬坡更不稳定,机具挂接角度为11°与35°时比较稳定。当悬挂机具角度为23°时的硬质路面爬坡仿真与试验误差约为4%,试验所得的俯仰角平均值误差分别为7%、9.5%、8%,均在误差允许范围内,试验数据与仿真数据基本一致,验证了样机模型的精确性和可靠性。
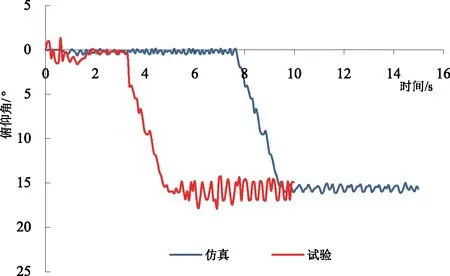
图4 硬质路面旋耕机组仿真与试验俯仰角曲线图
2.2 仿真结果
稳定性是指拖拉机在受到外界干扰后,通过自身性能抵抗如侧滑,倾翻,滑移等现象的能力。纵向行驶稳定性是指拖拉机上坡时不发生向后倾翻及下坡时不发生向前倾翻的能力[13-18]。
针对旋耕机组在四种不同土壤上行驶的状态进行仿真,然后运用其评价指标对仿真结果进行分析。根据对履带拖拉机的多次仿真结果可知旋耕机组最大爬坡角度为30°,爬坡角度大于30°时稳定性极差,趋于临界失稳的状态,过大角度则会发生倾翻现象。
2.2.1 旋耕机组与拖拉机稳定性分析
履带拖拉机的悬挂机构最大升角为35°,所以本实验暂选悬挂机具角度为11°,行驶坡度为10°,速度为3.8 km/h时,在干沙土路面上对履带拖拉机挂接机具后与挂接机具前进行仿真对比。用履带拖拉机旋耕机组的质心在Y轴上的垂向速度来作为旋耕机组在坡道行驶的稳定性的评价指标,仿真结果如图5所示。
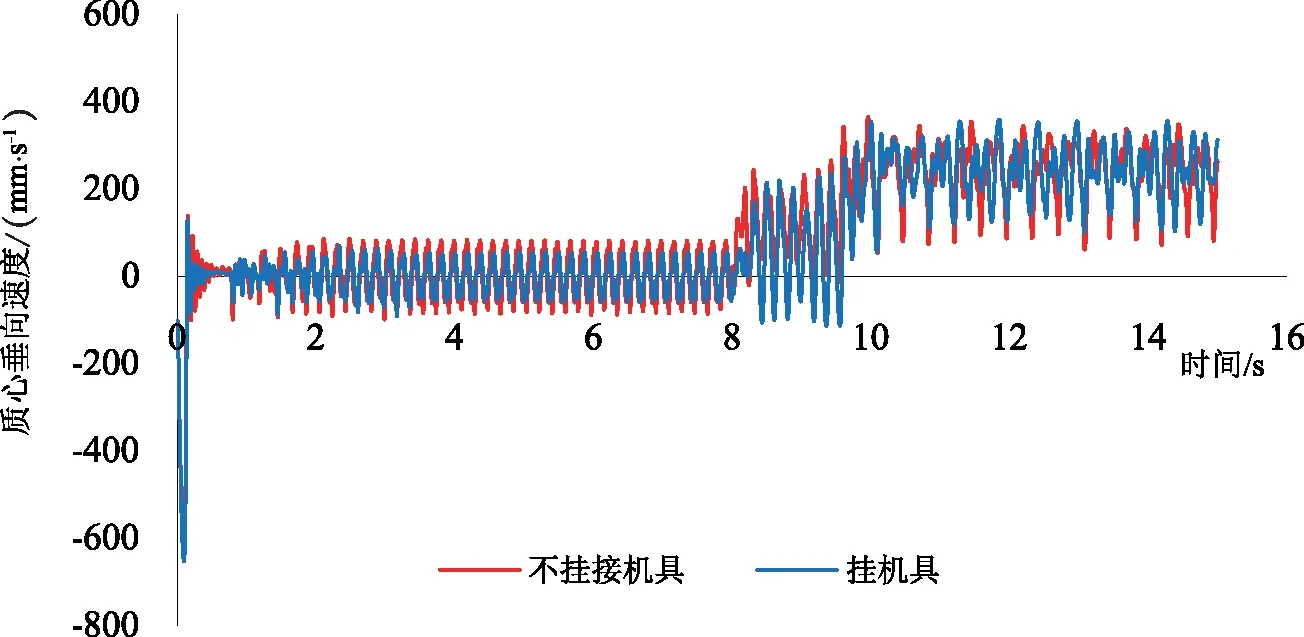
图5 悬挂机具与不挂机具的质心垂向速度曲线图
从图5可以看出,履带拖拉机在悬挂机具与不挂机具在干沙土路面上行驶时的质心垂向位移,在0-7.8 s与10-15 s为稳定行驶阶段,7.8-10 s为爬坡阶段即从整机在水平地面行驶转向整机在坡地行驶。在由平地向坡道过渡阶段旋耕机组的稳定性小于没挂接机具的拖拉机的稳定性。而旋耕机组由于在坡道匀速行驶时整体重心偏低,所以旋耕机组的稳定性大于没挂接机具的拖拉机的稳定性。
2.2.2 不同挂接机具角度在不同土壤行驶的稳定性分析
本次仿真选取坡度为10°,速度为3.8 km/h,由于考虑到机具的最大挂接角度与履带拖拉机旋耕机组的实际运输工况,把机具挂接角度(下拉杆与履带拖拉机接触面的角度)分成3组即11°、23°、35°,选取砂壤土、黏土、干沙土、硬质4种土壤类型下进行仿真试验,用履带拖拉机旋耕机组的俯仰角来作为拖拉机在坡道行驶的稳定性的评价指标。仿真结果如图6、图7、图8所示。从图6-图8可知,在三种挂接机具角度下在三种类型土壤上行驶时,在平地路面上稳定行驶时俯仰角差距不大,而在坡地行驶时差距较大。坡地行驶时四种土壤中相对而言砂壤土与黏土俯仰角差距不大,干沙土俯仰角幅值最大,硬质地面俯仰角幅值最小。所以三种挂接机具角度在四种土壤上行驶时,在干沙土路面行驶时旋耕机组最不稳定,在硬质路面行驶时旋耕机组最稳定,其主要原因是干沙土的变形指数比较大而硬质路面的变形指数相对较小。
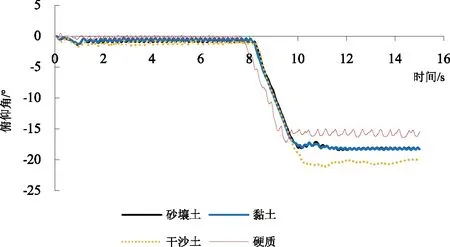
图6 下拉杆与水平面夹角为11°时不同土壤类型的俯仰角
图7 下拉杆与水平面夹角为23°时不同土壤类型的俯仰角

图8 下拉杆与水平面夹角为35°时不同土壤类型的俯仰角
2.2.3 不同挂接机具角度在同一种土壤上行驶的稳定性分析
仿真选用坡度为10°,速度为3.8 km/h,机具挂接角度分别为11°、23°、35°。由图6-图8可知,4种挂接机具角度在砂壤土与砂土上行驶稳定性差别不大,所以选择砂壤土为仿真试验路面,仿真结果如图9所示。
由图9可知,当拖拉机挂接机具选择这三种角度在砂壤土上行驶时,当挂接机具角度为11°、35°时俯仰角的幅值小于23°,故当旋耕机组在砂壤土的坡道上行驶时机具挂接角度为11°与35°时比较稳定。
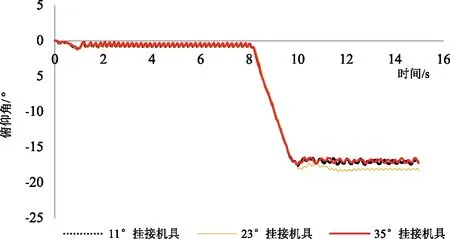
图9 不同挂接角度在砂壤土上行驶时的俯仰角
3 结 语
建立履带拖拉机以及履带拖拉机旋耕机组纵向稳定性的数学模型,分析了履带拖拉机旋耕机组在坡道的受力情况以及倾翻临界点,并进行整机模型的三维设计。分析了履带拖拉机旋耕机组与履带拖拉机空载时在爬坡时的稳定性差异,同时比较了不同悬挂机具角度在四种地面类型爬坡时的稳定性差异。当履带拖拉机悬挂机具角度为11°在坡道稳定行驶时比未挂接机具的履带拖拉机在坡道稳定行驶时稳定性好;当三种机具挂接角度的拖拉机在砂壤土、黏土、干沙土、硬质四种典型路面的坡道行驶时,在硬质路面的坡道行驶时最稳定,在干沙土路面的坡道行驶时最不稳定;当三种机具挂接角度的拖拉机在砂壤土坡道行驶时机具挂接角度为11°与35°时其稳定性较好。
猜你喜欢
汽车实用技术(2022年15期)2022-08-19
露天采矿技术(2022年1期)2022-02-20
当代陕西(2021年13期)2021-08-06
农民致富之友(2020年17期)2020-06-19
当代工人(2020年1期)2020-05-11
河北农机(2020年5期)2020-01-11
宇航学报(2019年5期)2019-06-05
中国环境监察(2016年11期)2016-10-24
现代农机(2016年4期)2016-09-18
农家顾问(2014年5期)2014-06-26