HXJ-1型枣树修剪机的研制
2020-10-19 06:42张琦峰孙盛刚秦喜田刘学峰刘学串
农机化研究 2020年8期
张琦峰,钟 波,孙盛刚,秦喜田,刘学峰,刘学串
(1.山东农业机械科学研究院,济南 250100;2.山东双佳农装科技有限公司,济南 250100)
0 引言
红枣是我国特色林果经济作物[1],在我国分布广泛,自东北南部至华南、西南,西北到新疆均有种植,且以黄河中下游、华北平原栽培最为普遍[2]。枣树修剪可分为老树复壮修剪、幼树整形修剪和盛果期修剪[3]。老树复壮修剪主要对其衰老枝进行复壮更新,老枣树枣头枝残缺不齐,枣股稀少,坐果率低,根据其衰老程度进行复壮修剪,可以使其萌发健壮分枝,形成新树冠,大幅提高枣果产量。研究表明,通过枣树复壮修剪可以使枣果产量增加25%以上[4]。幼树整形修剪的目的是形成合理的树形结构和树冠形状,枣头枝的生长大致呈之字形螺旋均布,适宜枣树的树形较多,密植情况下多选用纺锤形或双主枝开心形,这两种树形树冠通风透光性好,大小适宜,树形结构层次分明。盛果期修剪的则主要修剪密挤枝及徒长枝等,防止树冠紊乱,合理调节营养生长和结果生长。目前,国内的枣园仍然以人工手持修枝剪进行单枝修剪为主,辅以梯子、凳子等简易工具,不仅修剪效率低,而且操作不便,同时具有一定的危险性。发达国家果树机械化修剪技术的研究于20世纪60年代已经开始,目前其生产效率比人工提高5~10倍[5-7]。随着我国红枣种植面积增大和现代化枣园的不断出现,传统的人工管理方式已经远远不能满足发展需求。枣树机械化修剪技术结合了农机与农艺特点,在枣树统一树形、增加枣果产量及减低生产成本等方面有重要意义。为此,笔者研发了一种枣树修剪机,以提高修剪质量和效率,推动枣园全程机械化管理。
1 整机结构及工作过程
1.1 整机结构及特点
HXJ-1型枣树修剪机主要由仿形机架总成、修剪总成、枣吊去除总成和液压系统等组成,如图1所示。
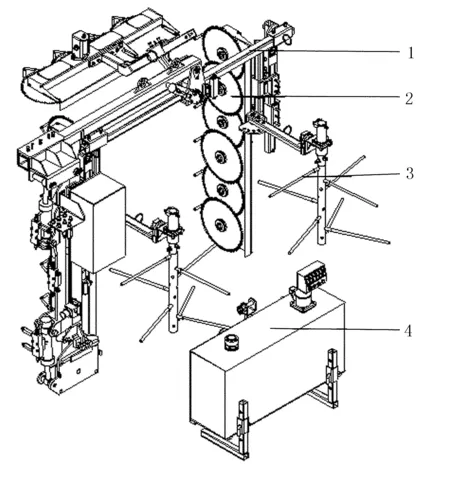
1.仿形机架总成 2.修剪总成 3.枣吊去除总成 4液压系统图1 HXJ-1型枣树修剪机Fig.1 HXJ-1 jujube tree prunner。
该机具有良好的仿形性,工作环境适应性强,结合农艺要求,具备枣吊去除功能,基本修剪作业工作稳定,结构简单,便于安装操作。
1.2 工作原理
HXJ-1型枣树修剪机以拖拉机为配套动力,悬挂安装于拖拉机前配重位置,设置单独油箱,以拖拉机的PTO后动力输出作为主要驱动动力,配合齿轮泵提取液压油,在电磁阀组的控制下完成相关作业。工作时,修剪机侧置于拖拉机一侧,在液压油缸的牵引下完成仿形机架调整以控制树形,安装在仿形机架上的修剪装置分别对枣树的左、右两侧和上侧进行统一修剪[8-9];枣吊去除总成对修剪过的枣枝进行击打,利用枣树落果性的特点去除枣吊。
2 主要结构设计
2.1 仿形机架的设计
依据合理密植要求对枣树进行修剪,使树高小于行距。依据枣树品种不同,一般行距为3m和4m,纺锤形树体树高通常控制在2.5m,其定干高度一般80~100cm。在进行机架设计时,应充分满足农艺需求,重点考虑机架的仿形性[10-12]。
HXJ-1型枣树修剪机的仿形机架主要有主干机架和挂接机架组成:主干机架呈倒L型,用于连接拖拉机及将修剪机置于拖拉机一侧,通过主干机架部件间的销轴可以调整修剪机与地面及拖拉机之间的距离和角度;挂接机架用来安装修剪总成并使之与主干机架连接,通过调节挂接位置及牙嵌式离合器,可以灵活地改变修剪形状,使设备具有有较高的仿形性。仿形机架总成如图2所示。

1.主干机架 2.挂接机架 3.牙嵌式离合器 4.转轴图2 仿形机架总成Fig.2 Copying frame assembly。
2.2 修剪总成的设计
目前,国内外普遍采用的果树修剪方式是整株几何修剪[13],修剪器统一去除作业过程中阻碍设备通过的枝条。常见的果树修剪器有往复割刀式修剪器、转刀式修剪器及圆盘锯式修剪器[14]。
HXJ-1型枣树修剪机的修剪器采用圆盘锯式修剪器,特点是不需要惯性力平衡,不容易堵塞,割下的枝条抛撒形状均匀,方便收集,适应中、高速联合作业[15-16]。修剪器分为左右两侧及上侧,每侧的结构及工作原理类似,主要由护罩、液压马达、传动总成、圆盘锯及支撑杆等组成,如图3所示。
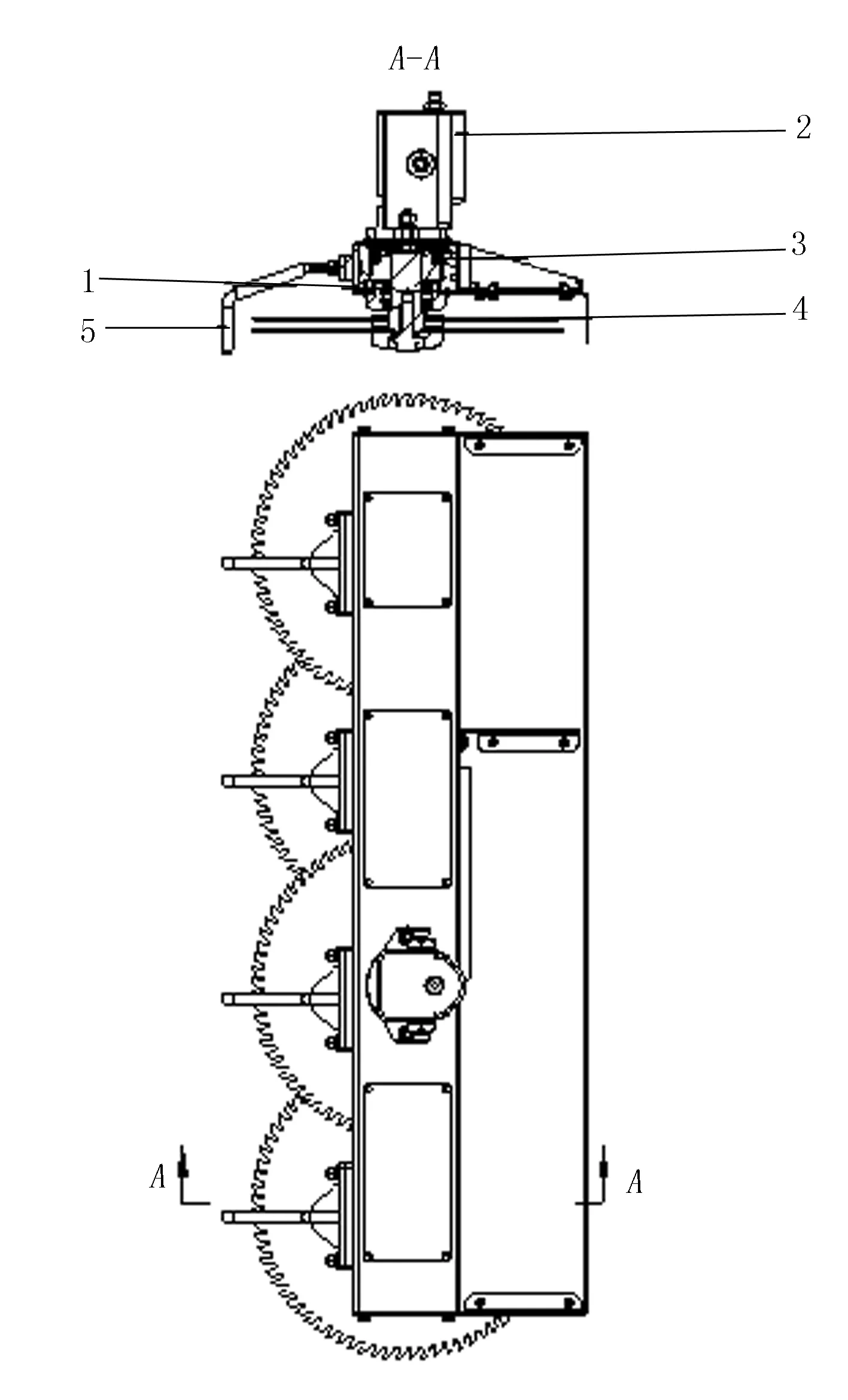
1.护罩 2.液压马达 3.传动总成 4.圆盘锯 5.支撑杆图3 修剪总成Fig.3 The clamping and feeding device。
2.2.1 圆盘锯
对圆盘锯进行运动分析,如图4所示。
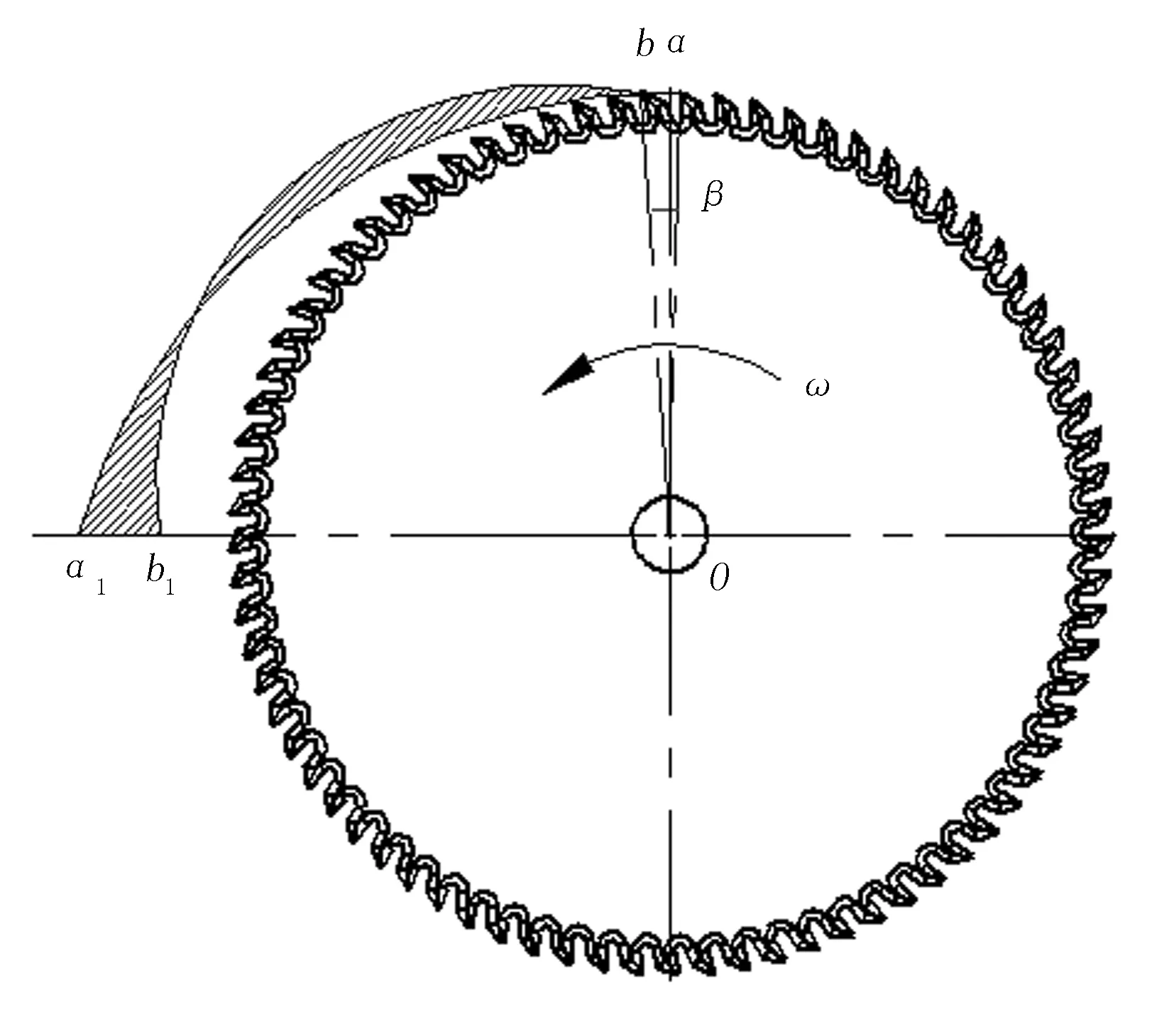
图4 圆盘锯运动分析图Fig.4 Motion analysis diagram of disc saw。
图4中,圆盘锯绕O点匀速转动,同时随设备整体以速度U水平前进,任意取锯齿顶端a、b两点,则a、b两点的轨迹方程为
(1)
(2)
其中,R为圆盘锯半径,β为aO与bO的夹角,ω为角速度。
当a点转过π/2时,则
(3)
当b点转过π/2-β时,则
(4)
保证不会发生漏剪的条件为
xa1-xb1=h
(5)
其中,h为锯路高度。
将式(3)、式(4)带入式(5),得
(6)
结合相关研究[17-18],确定圆盘锯直径355mm,刀齿数量80,圆盘锯转速1 800~2 000r/min。修剪总成共设置16个圆盘锯,相邻锯片交错布置,交错长度100mm,保证不漏剪。其中,上侧修剪器设置4个圆盘锯,总长度约1 100mm;左右两侧修剪器各设置6个圆盘锯,总长度约1 600mm。
2.2.2 支撑杆
单支撑杆剪切适用于乔木、灌木的枝条修剪。支撑杆的支撑位置确定了枝条与圆盘锯的相对位置,按照枝条与圆盘锯的相对位置可以将单支撑杆剪切分为3类,即上位剪切、中位剪切和下位剪切。分别对此3种情况的枣枝进行受力分析[19-20],如图5所示。


图5 枣枝受力分析图Fig.5 Force analysis chart of jujube branches。
图5中,O为圆盘锯回转中心;θ为剪切点与O的连线与水平方向夹角;Ft为枣枝受到圆盘锯的切向力;Fn为支撑杆对枣枝的支撑力;Ff为枣枝受到圆盘锯前进的压力;F为枣枝受到的合力;τ为F与水平方向夹角。

(7)
(8)
(9)
剪切过程中,F越小则表明剪切越稳定,剪切效果越好。由式(7)~式(9)可以得出:当采用中位剪切时,F最小,枣枝近似于静止状态,剪切过程最稳定;采用上位剪切和下位剪切时,受力不平衡,枣枝易发生滑动,实际表现为切不断或切不着。
2.3 枣吊去除总成
击打去除机构通常采用旋转轴或旋转筒带动若干击打杆件对枝条产生震动或敲击的原理实现去除作业。按照击打杆件在旋转轴轴向的布置形式可以分为均布式和螺旋式两种。HXJ-1型枣树修剪机的枣吊去除总成采用螺旋式布置,特点是旋转轴径向面内击打频率低,旋转轴轴向面内击打密度大,其目的在于最大范围内去除作业区域的枣吊,而避免对同一枣枝反复击打造成损伤。
2.3.1 枣吊去除总成结构
枣吊去除总成主要由滚筒、击打杆、液压马达及仿形支架组成,如图6所示。其滚筒高度570mm,安装7根击打杆,击打杆长度480mm,击打杆布置方式如图7所示。

1.滚筒 2.击打杆 3.液压马达 4.仿形支架图6 枣吊去除总成Fig.6 Jujube hanging removal assembly。
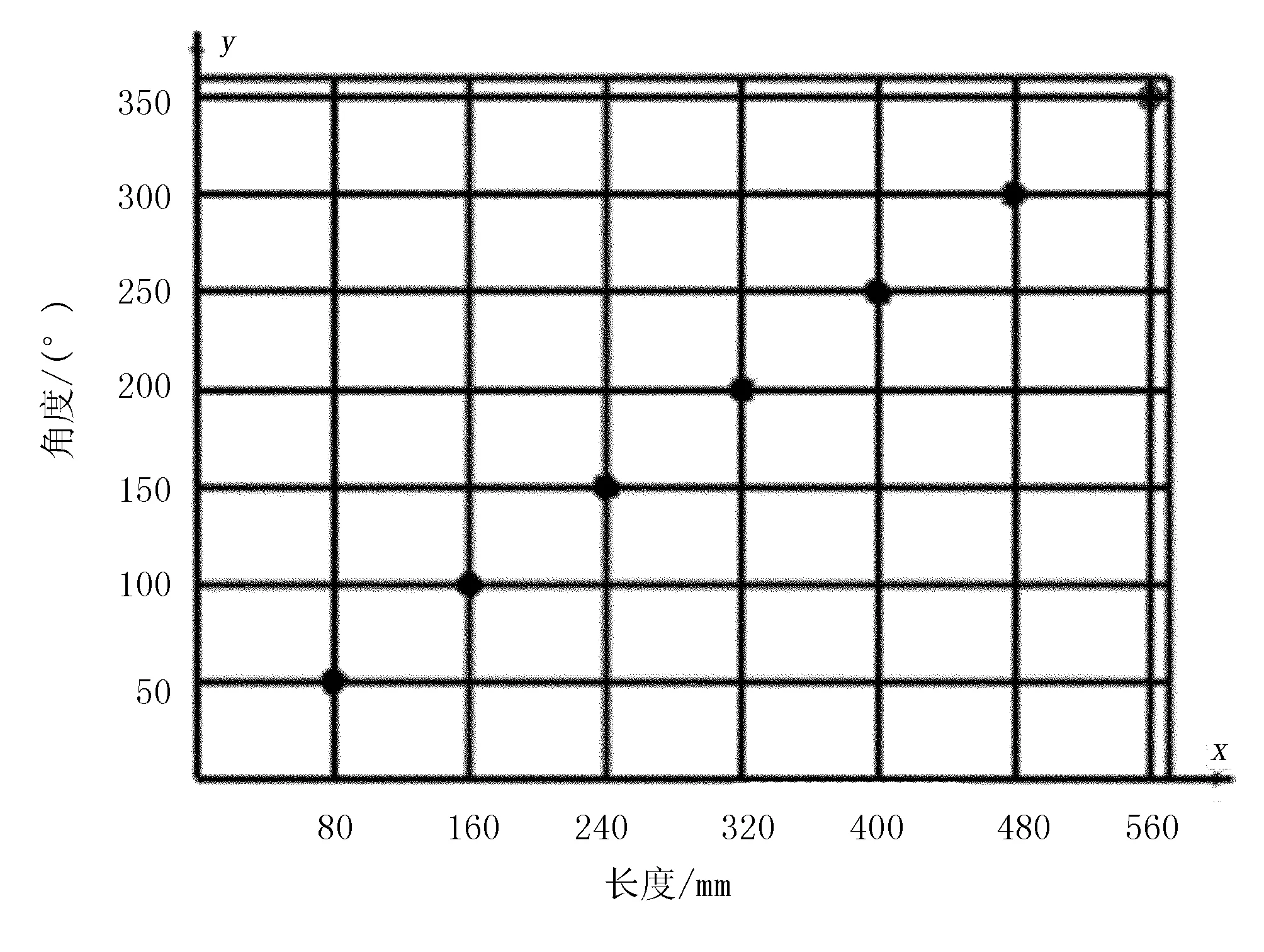
图7 击打杆布置图Fig.7 Hitting rod layout。
2.3.2 击打杆运动分析
击打杆件进行运动分析如图8所示。

图8 击打杆运动分析图Fig.8 Kinematics Analysis Diagram of Hitting Rod。
图8中,O为旋转轴;杆件外端点绕O点旋转的同时随设备整体以速度v1做匀速直线运动;θ为杆件转过的角度;d为击打杆长度。
对外端点构建运动方程,即
(10)
对式(1)求导得
(11)
则外端点速度V为
(12)
运用SolidWorks motion追踪外端点运动轨迹(见图9)[21],设置滚筒转速为120r/min,设备前进速度为0.8m/s。图9(a)中,单支击打杆外端点在旋转轴径向面内的运动轨迹呈余摆线;图9(b)中,枣吊去除总成整体在旋转轴轴向面内击打密度大,对于作业范围内某一点的重复击打率低,符合设计要求。

图9 击打杆外端点运动轨迹Fig.9 The outer endpoint motion trajectory of hitting rod。
2.4 液压系统
HXJ-1型枣树修剪机的液压系统主要由动力单元、控制单元及执行单元组成[22-23]。配置单独的油箱及齿轮泵,以解决拖拉机后动力输出压力不足问题。液压系统主要由齿轮油泵及油箱、电磁阀组件、油缸及液压马达等组成,如图10所示。

1.液压泵 2.油滤器 3.动力输出 4.电磁多路阀 5.液压油缸 6.驱动马达图10 液压系统示意图Fig.10 Schematic diagram of hydraulic system。
3 田间性能测试
该机于2018年11-12月在山东济南进行了田间测试,配套动力为36.75kW拖拉机。对枣枝漏剪率进行了统计,漏剪率≤10。漏剪率计算式为
(13)
其中,η为漏剪率,a为漏剪枝数,c为总枝数。
样机技术参数如表1所示,各项技术指标符合设计要求。
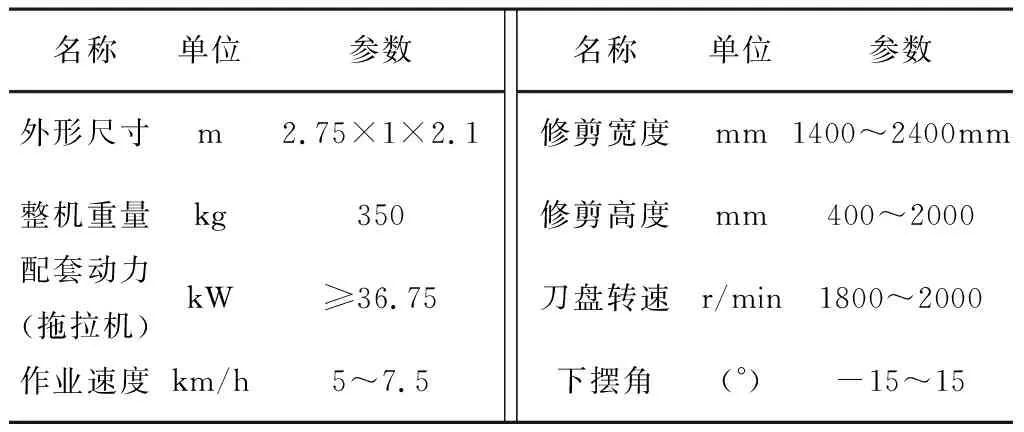
表1 HXJ-1型枣树修剪机主要技术参数Table 1 Main technical parameters of 4QG-2 silage harvester。
4 结论
1)设计了一种枣树修剪机,可对枣树进行机械化高效修剪,配合简单的人工内部精细修剪,可完成枣树统一树形及老树复壮等作业。
2)设计了一种枣吊去除装置,建立了枣吊击打杆外端点运动方程,通过SolidWorks motion进行仿真模拟。结果表明:单支击打杆外端点运动轨迹为余摆线,枣吊去除装置整体击打密度大,单点击打频率低,符合农艺需求。
3)液压系统设计合理,功能完备,工作可靠。
4)田间试验表明:HXJ-1型枣树修剪机可较好地完成枣树的高效机械化修剪作业,性能稳定可靠,各项测定值均符合要求,降低了人工劳动强度,推动了果园全程机械化管理进程。
猜你喜欢
经纬天地(2022年3期)2022-07-20
数学物理学报(2022年2期)2022-04-26
橡塑技术与装备(2021年23期)2021-12-13
制造技术与机床(2019年12期)2020-01-06
装备机械(2019年4期)2019-12-26
中学生数理化·教与学(2019年8期)2019-09-18
中国新闻周刊(2017年23期)2017-07-12
数学物理学报(2017年1期)2017-06-05
制造技术与机床(2017年2期)2017-05-04
光学精密工程(2016年4期)2016-11-07