基于神经网络与重力补偿的植保机高度控制
2020-10-19 06:42郝学晟周国平
农机化研究 2020年8期
郝学晟,周国平
(南京林业大学 信息科学技术学院,南京 210037)
0 引言
植保机是指应用于农林植物保护的无人机,主要任务是代替人类更加精准地喷洒农药。实现农药喷洒精准化、无人化,在很大程度上解决了农药残留超标、环境污染及作业人员中毒等问题[1]。准确的定高飞行是精准喷洒农药的重要前提之一,但植保机在作业过程中不断减轻的质量给准确的高度锁定造成了很大的困难。
目前,在四旋翼无人机中通常采用的高度闭环控制算法有经典PID控制、串级PID控制、模糊PID控制、反步控制及滑膜控制等[2-5]。这些算法有的比较简单但缺乏自适应能力,有的比较复杂但计算量大不利于实现,且都没能就植保机质量不断减轻这一主要扰动给以针对性抑制。
针对上述现象,就主要问题和问题的主要方面提出一种带有重力补偿的PD控制策略,即重力补偿和PD并行给出控制器的输出。重力补偿作用于飞行器所产生的动力等于飞行器的自重,可使飞行器处于悬停状态,决定植保机的静态性能;而PD用于针对存在的高度误差对飞行器进行微调,抑制其它扰动及完成高度变化控制,决定植保机的动态性能。为此,针对植保机质量不断减轻这一问题,设计使用BP神经网络估计植保机的当前质量,给出适应的重力补偿,使植保机在质量减轻的情况下依然可以做到悬停无静差。从仿真结果可以看出:所提控制策略可以有效地抑制质量变化带来的扰动,使高度控制更加精确。
1 植保机飞行原理与数学模型
1.1 飞行原理
四旋翼飞行器具有成本低、结构简单、易于操作等优点,又有非线性、欠驱动、强耦合等不利于控制的特性[6]。本文所讨论的四旋翼植保机,采用十字飞行结构,如图1所示。

图1 飞行原理示意图Fig.1 The diagram of flight theory。
令机头1号电机ω1位于Yq轴正向,3号电机ω3位于负向,2号电机ω2位于Xq轴正向,4号电机ω4位于负向。其中,1、3号电机逆时针旋转,2、4号电机顺时针旋转,以抵消反扭矩。另外,设有两个喷洒喷头分别位于2、4号旋翼的正下方,以借助旋翼高速旋转时的下旋气流增强农药的穿透力。四旋翼植保机有4种基本动作,即升降运动、俯仰运动、横滚运动及偏航运动。升降运动通过同时增加或减少4个电机的转速来实现;俯仰运动通过提高ω1转速、降低ω3转速产生俯仰转矩来实现;横滚运动通过提高ω2转速、降低ω4转速产生横滚转矩来实现;偏航运动通过增加相对电机转速而减少相邻电机转速,利用未完全抵消的反扭矩来实现。
1.2 植保机作业过程简述
植保机满载农药飞行至作物正上方,打开喷头喷洒药液;工作人员远程控制植保机沿着机头方向做匀速直线运动,即俯仰运动按列喷洒;当喷洒到该列末端时,做横滚运动水平移动至下一列,此过程不喷洒药液;当移动至下一列的正上方时,打开喷头沿着机头反方向继续做匀速直线运动,即对下一列作物进行喷洒作业;依次往复,直至药液用尽空载飞回,重载药液进行下一次作业。
1.3 植保机数学模型
设地坐标系E={OEXEYEZE}与地表固连静止不动为参考坐标系,机体坐标系Q={OqXqYqZq}与机体固连随机体一起运动。在建模前做3点假设:假设飞行器在运动过程中为刚体;假设飞行器完全对称,几何中心与质心重合且在坐标原点Oq处;假设桨叶在转动过程中无形变。
这里用俯仰角φ(rad)、滚转角θ(rad)、偏航角ψ(rad)3个欧拉角来表示飞行器的姿态,即地坐标系与机体坐标系之间的角位置关系。从机体坐标系Q到地坐标系E的转换矩阵为
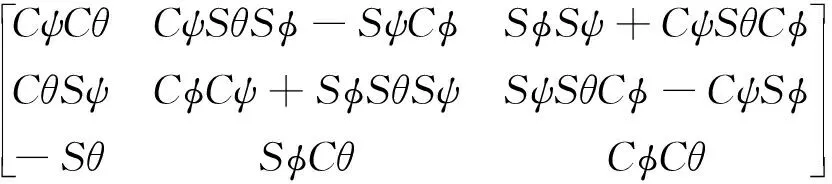
(1)
其中,C表示cos余弦函数,S表示sin正弦函数。
由单个旋翼所产生的升力Fi=ρCTAR2ni2,可得到飞行器在机体坐标系下的垂直总升力FZ(N)及绕3个坐标轴的转动力矩M(N·m)为
(2)
其中,ρ为空气密度(kg/m3);CT为升力系数;CD为偏航转矩系数;R为旋翼半径(m);A为旋翼面积(m2);l为旋翼中心到无人机中心的距离(m);ni为第i个旋翼的转速(r/s)。
由式(1)、式(2)及牛顿力学方程可以推出飞行器在地坐标系下3个坐标轴上的加速度为
(3)
其中,m为机体总质量(kg);g为重力加速度(m/s2);kX为飞行器在XE轴上空气阻力系数;kY、kZ同理。
设飞行器定点转动的角速度为Ω(rad/s),Ω在机体坐标系下三个坐标轴上的分量为p、q、r(rad/s),则由欧拉动力学方程且考虑陀螺效应得p、q、r对时间的微分为
(4)
其中,IX、IY、IZ分别为在机体坐标系下飞行器绕Xq、Yq、Zq轴的转动惯量(kg·m2);Ij为电机的转动惯量(kg·m2);gu=n1-n2+n3-n4为陀螺转矩。
由欧拉运动学方程可以得到3个欧拉角对时间的微分为[7]
(5)
由于植保机飞行速度慢,且体积质量都较小,所以忽略空气阻力和陀螺效应对植保机飞行的影响。经进一步简化,得到飞行器的数学模型为
(6)
2 控制器设计与分析


图2 控制器结构框图Fig.2 Block diagram of controller。
2.1 BP神经网络
人工神经网络模拟动物脑细胞结构,将人工神经元按一定的逻辑结构排列起来,模拟轴突与树突之间的信息传递方式,将一层的输出加权求和传递给下一层的神经元;数据在神经元中经过传递函数处理再次作为输出传递给下一层,一直到最终的输出层将数据输出。由于神经网络这种特殊的结构,使得其具有强大的函数逼近能力和数值泛化能力。另外,神经网络还具有强大的学习能力,在网络训练过程中可以根据输出误差不断修改各神经元的权值与阈值,使得网络能根据输入给出更理想的输出。
BP神经网络全称为反向传播网络,指的是将输出层的误差反向传播回各层,用以修改各层神经元的权值与阈值的前向神经网络。本文所设计的BP神经网络由输入层、输出层及两个隐层组成,如图3所示。
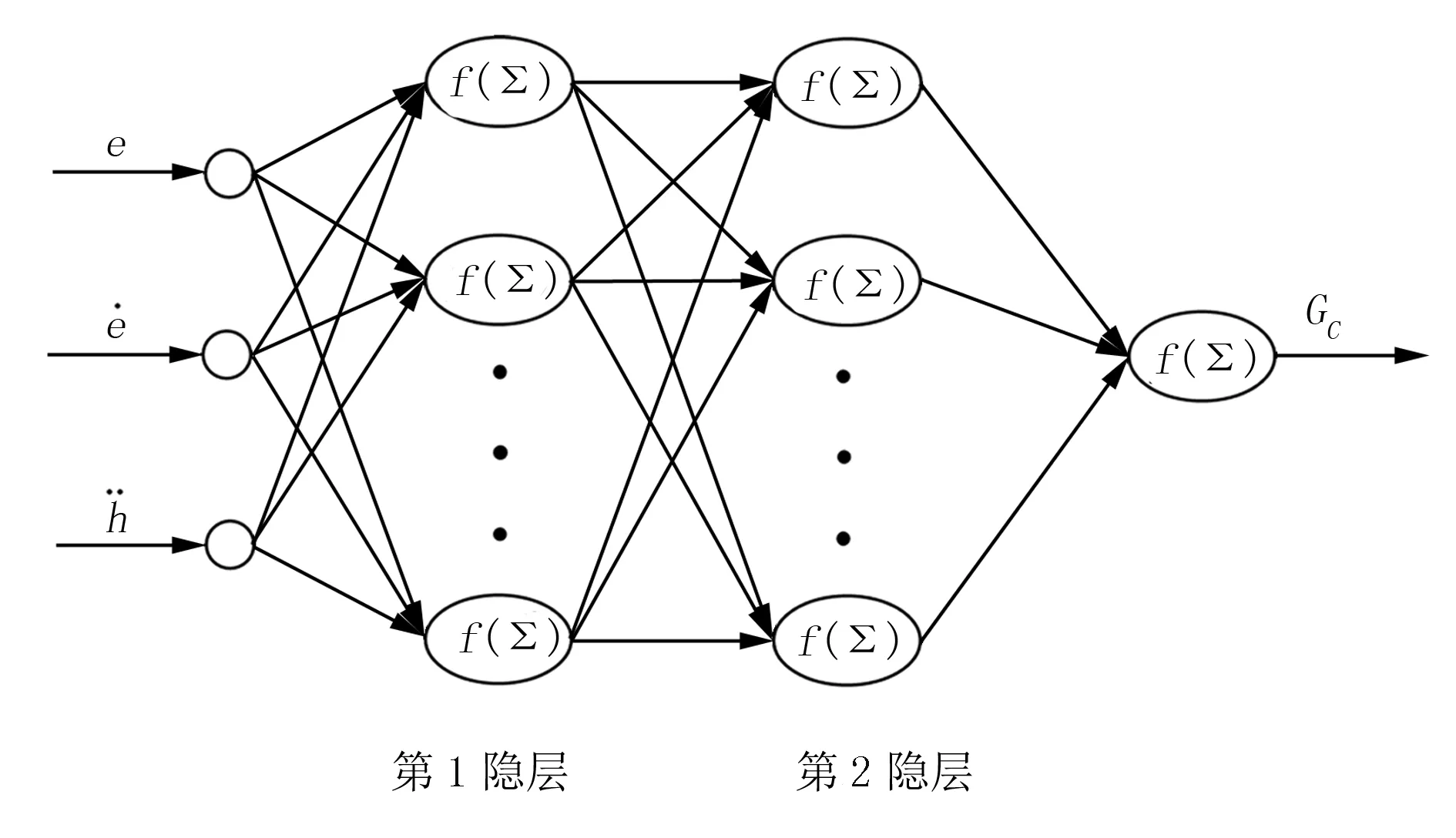
图3 BP神经网络结构图Fig.3 Structure diagram of BP neural net。
其中,第1个隐层含有30个神经元;第2个隐层含有10个神经元。各个神经元采用正切S型函数作为传递函数,其表达式为
f(x)=2/(1+e-2x)-1
(7)
采用Levenberg-Marquardt法对网络进行离线训练,将训练好的网络与控制器链接使用[8-10]。
2.2 重力补偿PID
2.2.1 经典PID
经典PID结构简单,参数易于整定,性能良好,实用性强。其控制规律为
(8)
其中,kp为比例项系数;ki为积分项系数;kd为微分项系数。比例项可以加快系统的响应速度,积分项可以抑制稳态误差,微分项可以减小超调抑制系统震荡。但经典PID控制器缺乏自适应能力,它的实现依赖于固定的系统模型参数,若在系统运行过程中系统参数发生变化,即具有一定的时变性,那么仅仅使用经典PID控制器将不会取得很好的效果。另外,对于飞行器这样需要克服重力运行的系统而言,使用经典PID控制器往往需要系统存在一定的误差,以使其更好地克服重力跟踪轨迹,给系统带来一定的不稳定性,也是重力补偿PD控制器在机器人关节控制上得到应用的原因[11]。
2.2.2 重力补偿PD
在控制器中加入的积分项相当于在系统中加入一个极点,消除稳态误差的同时也给系统的暂态带来了一定的不稳定性。另外,重力补偿PD控制器在PID基础上加入的重力补偿可以完全克服自身重力,使植保机成为无差系统。
因此,所采用的控制策略完全取消了积分项,选用重力补偿PD为最终的控制器。其控制规律为
(9)
其中,Gc为重力补偿值。该补偿值为一常数,与PD控制器并行链接,当控制器P项和D项输出都为零,即只有Gc作用时,控制器的输出作用在旋翼上产生的升力刚好等于植保机自身的重力。因此,在理想条件下,使植保机的高度锁定不依赖于误差的输入,这在理论上消除了稳态误差。在此基础上加入的P项和D项,用以应对除自身质量外的外界的扰动,加强植保机在定高飞行中的稳定性。
2.3 神经网络预估重力补偿PD
在重力补偿PD控制器的基础上,针对植保机作业过程中质量不断变化这一问题,设计利用BP神经网络根据高度误差、误差变化率及上升加速度来估计当前植保机的质量,给出正确的重力补偿值,作为重力补偿PD控制器中的重力补偿项,使植保机可以抵抗质量变化更精确地锁定在期望高度。
综上所述,本文就BP神经网络强大的函数逼近能力,结合重力补偿PD控制器在飞行器高度控制上的优势,针对植保机在喷洒作业过程中由于质量减轻引起的高度锁定不精确的问题,提出采用BP神经网络预估重力补偿PD控制策略控制植保机的高度。
3 系统仿真与结果分析
在MatLab/Simulink环境下仿真分析上述控制策略在四旋翼植保机上的控制效果,利用S-函数实现公式(6)中的四旋翼飞行器物理模型,利用Simulink模块库中的模块搭建控制器模型。其中,角度采用串级PD控制策略,高度分别采用BP神经网络预估重力补偿PD控制器和经典PID控制器,并就两种不同控制器的高度阶跃响应曲线进行比较分析。四旋翼植保机物理模型参数如表1所示。
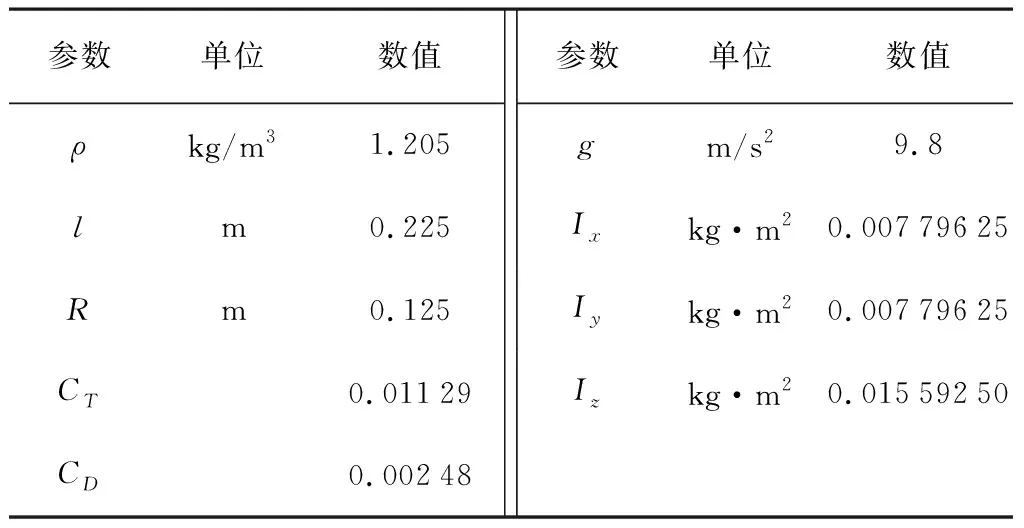
表1 四旋翼植保机物理模型参数Table 1 parameters of plant protection quadrotor。
由1.2节可以看出,植保机喷洒药液质量减轻发生在匀速直线运动阶段。因此,在确保仿真过程有效性和针对性的前提下,简化无关的运动过程,设置植保机的仿真流程及条件为:起始位于地坐标系原点,机体坐标系与地坐标系重合,即各欧拉角为零;仿真锁定高度为50cm,仿真时间为30s;在仿真开始后2s时让飞行器俯仰角偏转-0.2rad,在3s时将俯仰角转回0rad,以使植保机在地坐标系YE轴正向获得大约2m/s的飞行速度,即向前飞行作业;将植保机物理模型中的质量参数m改为从1.4kg到0.8kg变化的函数,以模拟由于喷洒作业而减轻的质量。
植保机定高飞行仿真结果如图4所示。其中,BPmPD为植保机在BP神经网络预估重力补偿PD控制策略下的响应曲线,PID为植保机在经典PID控制策略下的响应曲线。
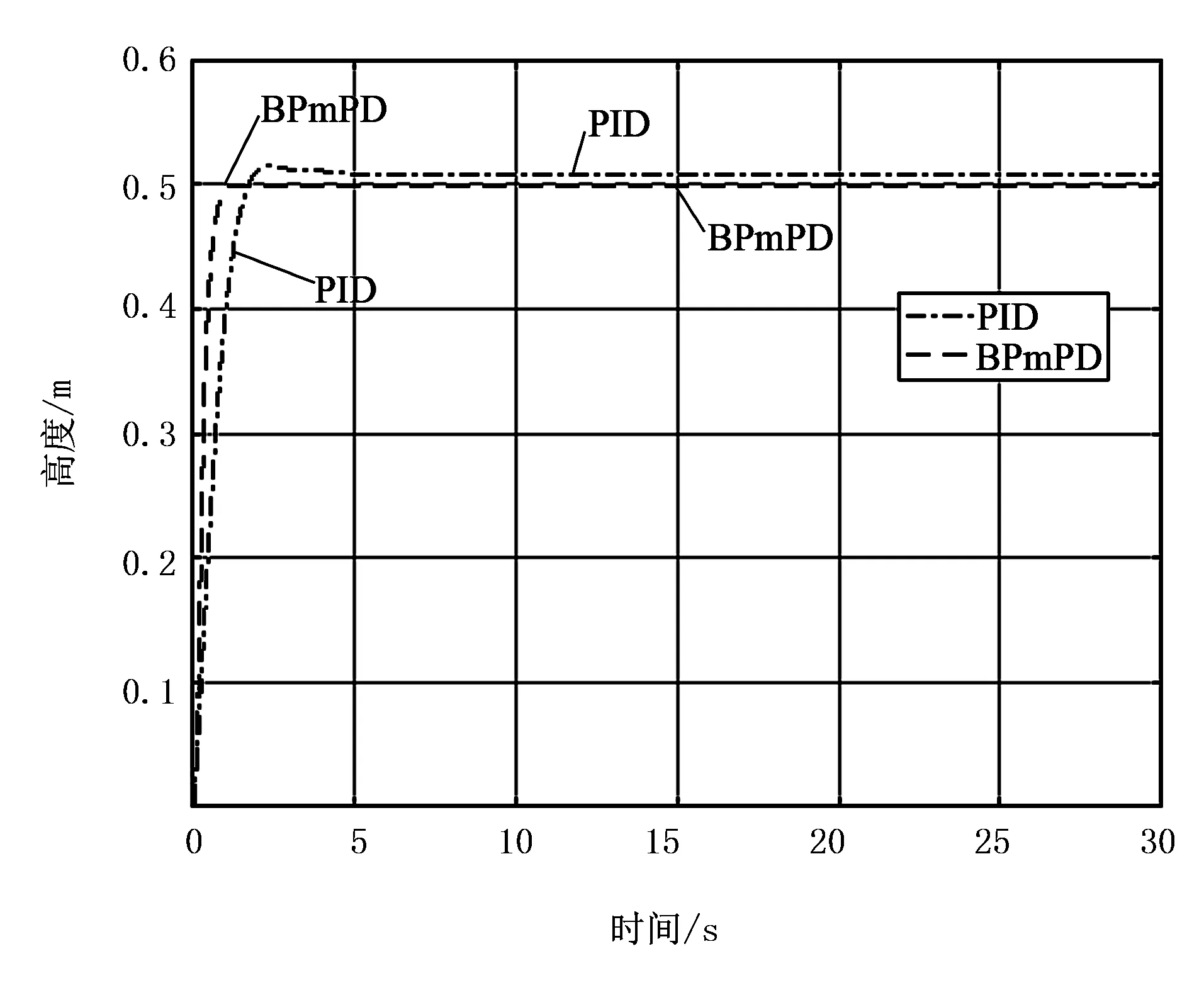
图4 植保机定高飞行仿真结果图Fig.4 Simulation results of plant protection quadroto。
由仿真结果可以看出:BP神经网络预估重力补偿PD控制器使植保机在1.1s时达到预定高度,而PID控制器使植保机在1.8s时才达到预定高度;同时,在BP神经网络预估重力补偿PD控制器作用下植保机始终无静差的保持在该预定高度,而在PID作用下植保机出现了1.5cm的超调和1cm的稳态误差。综上所述,在植保机高度控制问题上,BP神经网络预估重力补偿PD控制策略无论是在动态性能上还是在静态性能上,都明显优于经典PID控制策略。
4 结论
植保机不仅具有非线性、强耦合、欠驱动等特性,还具有其它四旋翼飞行器所不具有的时变性,即由植保机不断喷洒农药所引起的质量参数随时间减少的特性,给精确地定高飞行、精准地喷洒农药带来了困难。本文针对以上问题提出了BP神经网络预估重力补偿PD控制策略,即采用重力补偿PD控制器控制高度,同时使用BP神经网络预估实时的重力补偿值的控制策略。仿真实验表明:所提出的BP神经网络预估重力补偿PD控制策略能够有效地控制植保机的高度,提高定高飞行的精度。
猜你喜欢
凤凰动漫(军事大王)(2022年1期)2022-04-19
广西植保(2021年4期)2022-01-06
今日农业(2021年17期)2021-11-26
北京航空航天大学学报(2021年9期)2021-11-02
军民两用技术与产品(2021年9期)2021-03-09
电子制作(2019年9期)2019-05-30
电子制作(2018年2期)2018-04-18
新农业(2017年2期)2017-11-06
北京航空航天大学学报(2016年8期)2016-11-16
新农业(2016年22期)2016-08-16