
工业机器人螺旋路径规划的研究与仿真
2020-10-19 09:47:48刘子贵
机器人技术与应用 2020年4期
刘子贵
(江门职业技术学院,广东,529090)
0 引言
当钻井钻杆等螺纹有缺陷时,因报废成本较高,一般都会采用修复方式:先挖除缺陷,再对缺陷补焊,最后加工去除多余的补焊材料。如若碰到螺纹直径和螺距较大的情况,其在修复加工时无法采用常规的车削、铣削或镗削,而且成形刀具的制造极其困难。采用工业机器人补焊或加工螺纹,可以避免螺纹修复专用设备的投入,降低企业运作成本。因此,研究工业机器人的螺旋路径规划,具有十分重要的应用价值。
目前,针对直线、圆弧和规则曲线的路径规划已经非常成熟,但针对螺纹轨迹规划尚处于探索和实验阶段。首先必须建立螺旋线模型,然后需要选取数量合适的节点和刀具进给的步进角大小,最后工业机器人末端目标加工位置需要较为复杂的变换,才能确保机器人能够走出连续光滑的螺纹曲线,因此,这比传统工业机器人的连续路径规划更为困难。
1 建立机器人运动学模型
本文以YASKAWA六自由度串联机器人MH5F为研究对象,采用D-H建模法建立机器人坐标系,如图1所示。
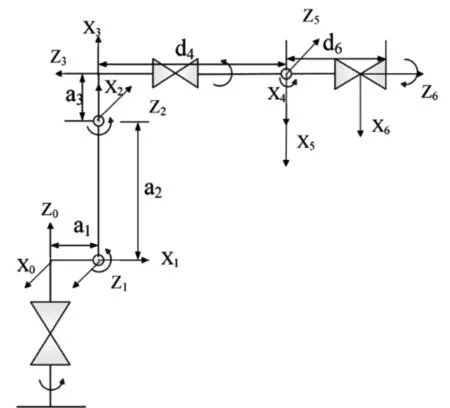
图1 MH5F机器人D-H坐标系
查询MH5F机器人的技术手册,可以确定图1中各关节连杆长度和连杆距离,a1=88mm,a2=310mm,a3=40mm,d4=305mm,d6=80mm。
MH5F工业机器人D-H 模型参数如表1所示。
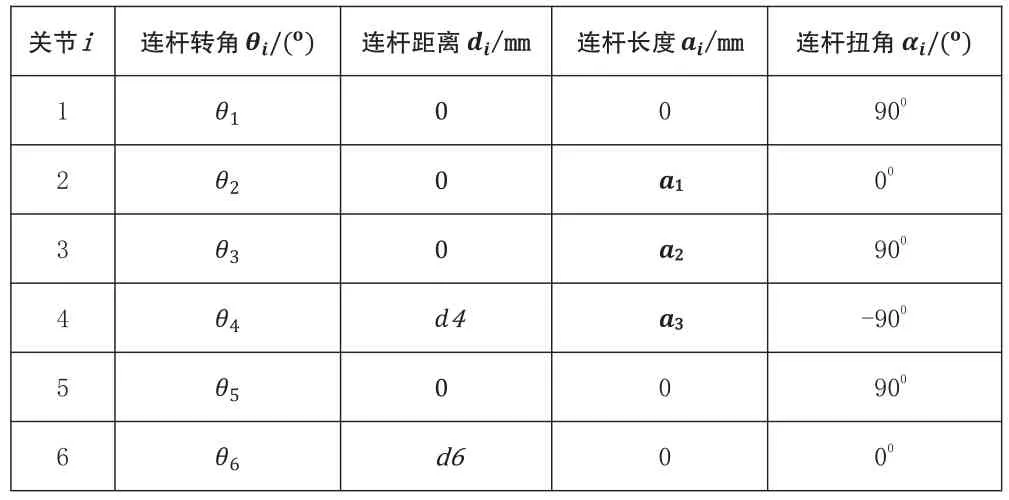
表1 安川MH5F工业机器人 D-H 模型参数
运用Robotics Toolbox 编制如下程序,建立机器人运动学模型,如图2所示。
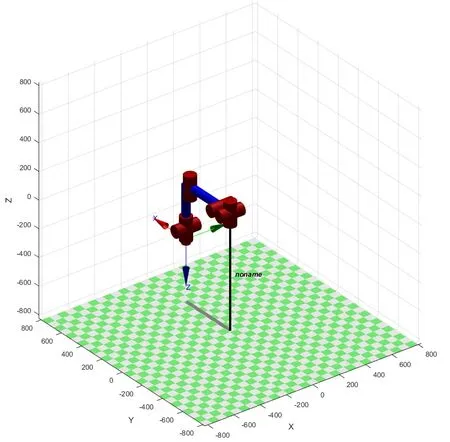
图2 MH5F机器人在MATLAB的模型
L1=Link('d',0,'a',0,'alpha',pi/2); %定义连杆1
L2=Link('d',0,'a',88,'alpha',0); %定义连杆2
L3=Link('d',0,'a',310,'alpha',pi/2); %定义连杆3
L4=Link('d',305,'a',40,'alpha',-pi/2); %定义连杆4
L5=Link('d',0,'a',0,'alpha',pi/2); %定义连杆5
L6=Link('d',80,'a',0,'alpha',0); %定义连杆6
robot=SerialLink([L1 L2 L3 L4 L5 L6]); %建立机器人模型
robot.display(); %显示机器人DH参数
theta=[pi/2 0 0 0 0 0]; %设定机器人初始关节角
robot.plot(theta)。 %显示机器人模型
2 螺旋线模型建立
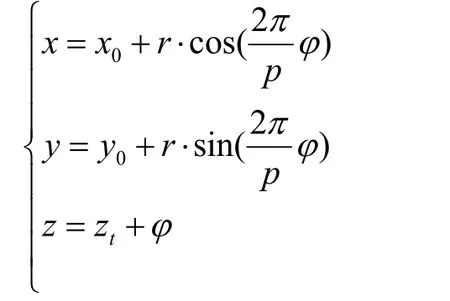
图3 螺旋线参数方程
根据传统的螺纹加工工艺原理,螺纹的加工精度受加工过程中加工刀具每次向前的步进角大小影响。因此,将空间螺旋线向平面坐标系投影,设步进角为,可获得半径为的扇形,如图4所示。
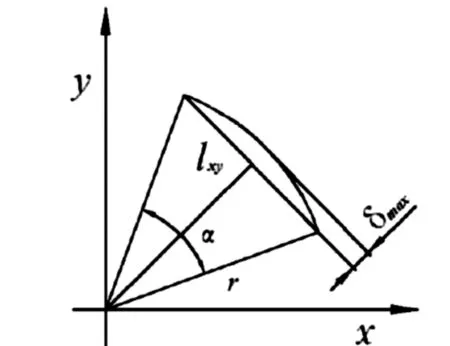
图4 螺旋线投影图
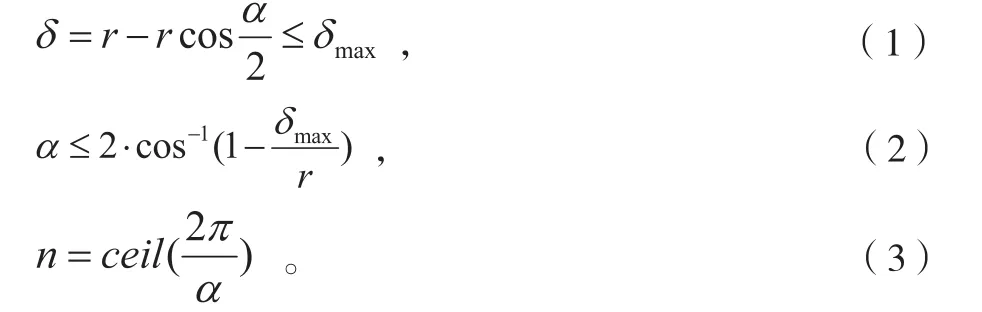
外螺纹有3种螺纹等级,分别为4h、6h和6g,假若取6h等级,查表得最大控制误差δmax为0.022mm。采用直线段拟合空间螺旋线,根据图4可推导出式(1),计算出误差δ,再经过变换得到步进角表达式,即式(2)。为了确保加工误差不超过δmax,必须让步进角≤0.0593。式(3)中的ceil为MATLAB函数,向正无穷取整,计算出n为106,n是一个螺距螺旋线上的节点数量。步进角越小,n越大,拟合精度就越高。
根据螺旋线参数方程、式(2)、式(3),利用MATLAB 编写下列程序,可生成5个螺距的空间螺旋线,如图5所示。
r=50; %螺纹半径为50mm
p=6; %螺距为6mm
alpha=2*acos(1-0.022/r); %根据控制误差,求得步进角
n=ceil(2*pi/alpha); %计算一个螺距的节点数量
x0=0; %初始坐标x的值
y0=0; %初始坐标y的值
z0=0; %初始坐标z的值
fi=0:p/n:5*p; %生成参数变量
x=x0+r*cos(2*pi/p*fi); %生成螺旋线x方向值
y=y0+r*sin(2*pi/p*fi); %生成螺旋线y方向值
z=z0+fi。 %生成螺旋线z方向值
plot3(x,y,z) %绘制空间螺旋线

图5 空间螺旋线
3 节点的截取与姿态
在螺旋线上选取若干个节点,工业机器人必须知晓这些节点的位置和姿态信息,然后分段执行,产生图5所示的空间螺旋线。
3.1 节点位置
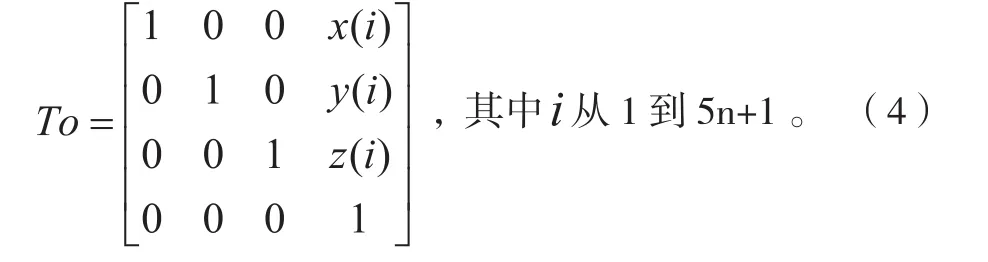
根据式(2)、式(3)分割空间螺旋线的依据和原理,可以通过空间螺旋线的数学参数表达式计算节点的位置,运用MATLAB编写下列程序:
for i=1:5*n+1; %设置循环量
To(:,:,i)=transl(x(i),y(i),z(i)); % 生成齐次矩阵
end。 %循结束
即可得到5n+1个节点的位置齐次矩阵,也是机器人末端坐标原点在机器人坐标系中的位置,如下所示:
3.2 节点姿态
工业机器人末端要达到目标加工位置,一般需要经过三步变换:
1)工业机器人的末端坐标系先绕参考坐标系y轴旋转 -90。;
2)再绕z轴旋转180。;
3.3 节点位姿
由式(4)、式(5)可得机器人末端位姿,即:
利用MATLAB编写如下程序,求得各节点位姿,即T(:,:,i),就是5n+1个节点位置和姿态的齐次矩阵序列。
Tp=trotz(pi)*troty(-pi/2); %绕y轴旋转-π/2,再绕z轴旋转π
fio=atan(p/(2*pi*r)); %求螺旋倾角
k=reshape([cos(fio*2*pi/p),sin(fio*2*pi/p),
zeros(1,5*n+1)],5*n+1,3); %生成螺旋轴
for i=1:5*n+1 %生成5n+1个节点
To(:,:,i)=transl(x(i),y(i),z(i)); %节点的位置
Tr(:,:,i)=angvec2tr(fi0,k(i,:))*Tp; %节点的姿态
RpY(:,:,i)=tr2rpy(Tr(:,:,i)); % 转化为roll、pitch、yaw角
T(:,:,i)=To(:,:,i)*Tr(:,:,i); %节点位姿
end。
4 螺旋路径仿真
运行上面的程序,可以获得各个节点的齐次坐标矩阵。利用逆运动学方程q(i)=ikine(T,'pinv'),求得每一个节点的关节变量值q。执行Robotics Toolbox中的驱动函数plot(q),仿真出工业机器人的螺旋路径。程序如下:
q=ikine(T,'pinv'); %求每一个节点的关节变量值
robot.teach; %机器人驱动
hold on; %保持
plot3(x,y,z); %仿真螺旋线
robot.plot(q)。 %绘制螺旋线
5 结束语
本文通过Robotics Toolbox建立数学模型,获得螺旋曲线的节点位置和姿态以及螺旋线的导程等相关参数,令工业机器人具备了执行螺旋线路径功能,对扩宽其应用领域具有重要的应用价值。
猜你喜欢
内江科技(2022年3期)2022-03-30 10:24:50
安徽科技(2021年2期)2021-03-05 06:31:14
装备制造技术(2020年2期)2020-12-14 03:09:26
电子技术与软件工程(2020年6期)2020-02-03 08:22:18
机械工程师(2018年7期)2018-07-30 09:05:26
现代工业经济和信息化(2016年10期)2016-10-26 06:12:56
中国卫生标准管理(2015年4期)2016-01-14 05:43:52
机械工程师(2015年9期)2015-02-26 08:38:12
机械工程师(2015年10期)2015-02-02 01:14:36
振动工程学报(2014年4期)2014-03-01 01:15:26
