基于电力驱动的拖拉机动力系统设计分析
2020-10-17 14:51朱学军
农机化研究 2020年9期
朱学军
(河南交通职业技术学院,郑州 450000)
0 引言
我国是一个农业大国,拖拉机在农业生产过程中的作用越来越重要。传统的拖拉机采用燃油提供动力,能量利用率低、噪声大且容易造成环境污染。目前,国际能源紧缺、环境污染严重,因此研发低噪声、低污染和高能源利用率的绿色农用机械成为各国的重点研究方向。随着制造业的飞速发展,电动农业技术由于其具有零排放和无污染的特征,成为了各国解决能源问题的主要途径之一[1]。
随着制造业的迅速发展,有很多汽车业的新技术应用到了拖拉机上,拖拉机的制造水平有了较大的提升[2-3]。随着电动汽车技术的应用逐渐增加,电力驱动技术也开始应用于拖拉机,即集成了电池和电机技术[4],通过电动机将蓄电池的电能转化为机械能,为拖拉机提供动力,可有效地解决环境污染和噪声大的问题。
拖拉机的主要工作环境是农田,工况比较复杂、阻力较大,对电力驱动的拖拉机动力要求较高。目前,我国电动拖拉机发展较慢,动力系统动力较小,无法应用于农田的耕种。随着低速度大扭矩的电机和电动汽车的发展,为拖拉机大功率驱动电机提供了可能。因此,本文以电力驱动为基础,对拖拉机的动力系统进行了设计研究。
1 硬件设计
1.1 技术路线
电力驱动的拖拉机主要分为硬件部分和软件部分,硬件部分的主要组成为电源模块、动力输出模块、负载模块和驾驶引导模块,软件部分则分为系统通道模块和数据存储模块。该拖拉机的主要动力来源为蓄电池,其总体结构如图1所示。

图1 拖拉机动力系统总体设计结构
1.2 电源模块
拖拉机的动力源为蓄电池,通过功率转换器将电压和电流转换为拖拉机的匹配值。蓄电池作为拖拉机的车载电源,为保证其能够为拖拉机提供稳定的动力,需要满足以下的要求[5]:①较大的比能量和比功率;②较长的循环寿命;③较好的充放电性能和较低的自放电率;④对环境不会造成污染。铅蓄电池由于其具有较好的稳定性和较高的性价比,因此选做拖拉机的电池。根据拖拉机得到预计行驶历程和载荷质量,可以估算出蓄电池所需要的功率P,即
其中,η1为拖拉机蓄电池的负载功率,η2为电动机的效率,η3为蓄电池的放点效率,M为拖拉机与负载的总质量,g为重力加速度,Vmax为拖拉机的最高可行驶速度,C为空气阻力系数。
另外,拖拉机在驱动过程中,还可以将多余的动能转化为电能储存在蓄电池内,为拖拉机的行驶提供动力。
1.3 动力输出模块
动力输出模块的作用是将蓄电池中的电能转化为动能,主要组成为电动机和AMT自动离合器,以保证拖拉机所需动力和较快的反应速度。
由于拖拉机的主要工作环境为农田,环境恶劣、阻力较大,因此需要电动机具有较强的抗腐蚀能力、较强的承载力和低转速大扭矩。将市场上的各类电动机进行对比,直流串励电机的综合性能较好,因此最终选定直流串励电机作为拖拉机的驱动电机,如表1所示。
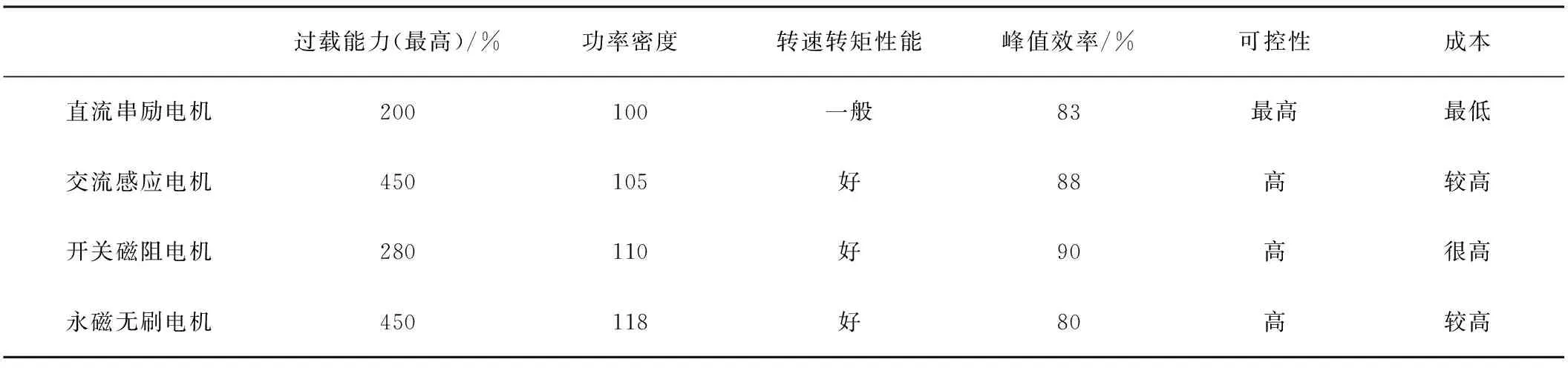
表1 电动机性能对比
拖拉机的AMT自动离合器对拖拉机速度档位进行调整,工作原理图如图2所示。
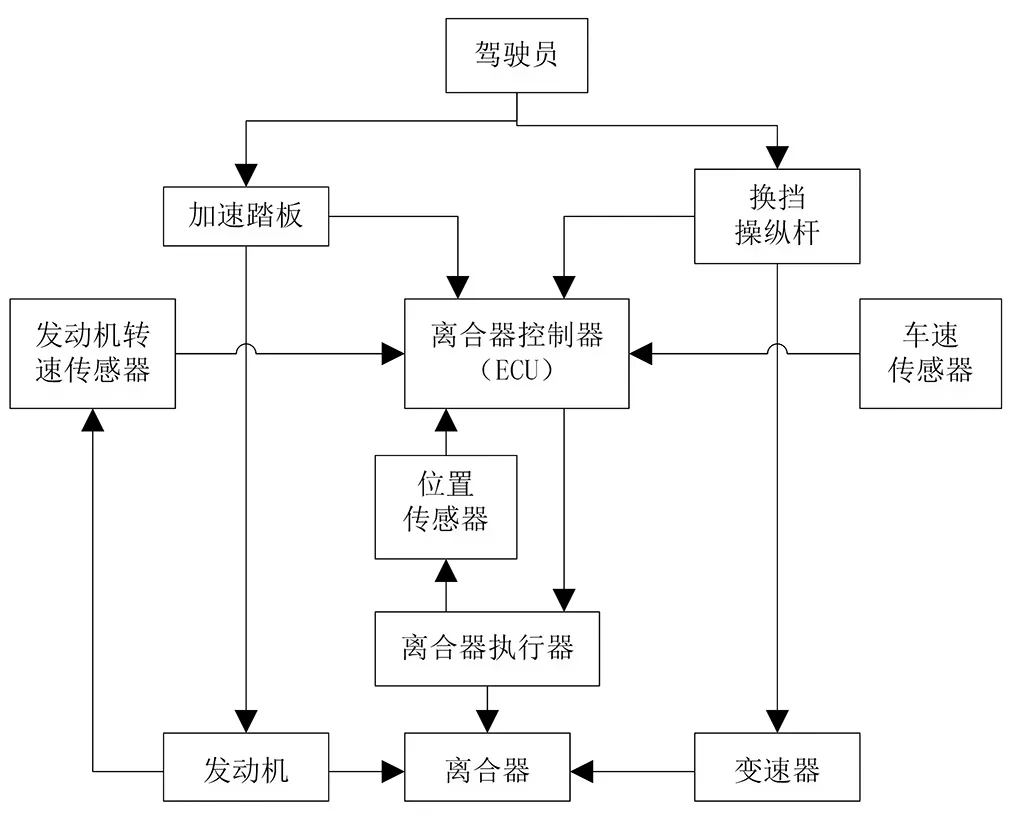
图2 拖拉机AMT自动离合器工作原理
该离合器为电控-电动式离合器,由电动机作为动力,通过发动机传感器、车速传感器和位置传感器分别测量发动机的转速、拖拉机速度和位置,并由离合控制器(ECU)接收转速、车速和位置等信息;然后,利用丝杠和螺母等机构将电机的圆周运动转换为离合器的直线运动,从而实现对离合器的控制;最后,由离合器控制变速器,实现对拖拉机速度的控制。在对拖拉机的AMT自动离合器进行调控时,需要采用模糊控制和自适应的控制方法[6],以提高拖拉机速度控制系统的精确性,保证换挡的平稳性,延长离合器的寿命。
1.4 负载模块
负载模块即为拖拉机的承重或者载荷,其质量需要通过电源模块和动力输出模块共同计算得出。在进行工作装载时,必须保证在最大载荷以内,以保证拖拉机的安全行驶。
1.5 驾驶引导模块
驾驶引导模块位于拖拉机的驾驶室内。通过在驾驶室内安装电子显示屏,在作业之前规划好拖拉机的行驶路线,驾驶员按照路线或者拖拉机自动行驶,还可以根据需求在行驶时依据土地状况更改路线。当拖拉机的作业面积较大时,该模块可以有效地减少重复行驶路线,提高作业效率。
1.6 数据存储模块和系统通道模块
数据存储模块用于存储拖拉机的运行历史数据,系统通道模块用于对拖拉机的行驶过程进行控制,采用模糊控制原理进行。
2 软件设计
拖拉机的AMT自动离合器的换挡包括升档和降档规律,传统换挡规律的方法是:利用解析法确定升档规律,降档规律则是在升档规律后有一定的速度延迟。该种方法的缺点是易在拖拉机速度变化较快时,造成频繁换挡,从而降低拖拉机的动力性,不易于拖拉机性能的发挥。因此,本文利用模糊控制的原理,对拖拉机的换挡规律进行改进。
拖拉机的行驶速度与很多因素有关系,包括地况、农作物的状态及作业工况等,但决定因素是拖拉机的电力输出P和滑转率δ。其中,电力输出P直接决定了拖拉机的速度V,滑转率δ则反映路况和作业工况对速度V的影响。因此,模糊控制算法选取电力输出P和滑转率δ作为双输入量,档位修正量ΔR则作为单输出量。
1)电力输出隶属度函数的确定。定义电力输出P的模糊子集为{VS,S,MS,MB,B,VB},为保证论域的覆盖程度,确定模糊控制域为XP=[1,13],建立电力输出各模糊子集的隶属度函数为

从式中可以看出:电力输出隶属函数与σ关系密切,为方便计算,设定σ1=σ2=σ3=σ4=σ5=σ6=1.189。同时,该系统的控制还与相邻子集的影响有关,若影响较大,则会降低系统的灵敏度[7-8],一般选取影响因子为0.5。由此可以得到
max[μVS∧μS]=max[μS∧μMS]=0.5
max[μMS∧μMB]=max[μMB∧μB]=0.5
max[μB∧μVB]=0.5
通过计算可以得出:b2=2.6,b3=5.2,b4=7.8,b5=11.2,确定了电力输出的隶属度函数。
2)滑转率隶属度函数的确定。定义滑转率δ的模糊子集为{VS,WS,WB,MB,B,VB},确定模糊控制域为Xδ=[0,14],建立滑转率各模糊子集的隶属度函数为
同理可以得到:b2=2.6,b3=5.2,b4=7.8,b5=11.2。由此确定了滑转率的隶属度函数。
3)档位修正量隶属度函数的确定。定义档位修正量ΔR的模糊子集为{NS,NZ,PZ},确定模糊控制域为XΔR=[-3,1],在控制域内建立各模糊子集的隶属度函数为
设定式中参数分别为σ1=σ2=σ3=0.85,建立以下函数关系,即
max[μNS∧μNZ]=max[μNZ∧μPZ]=0.5
由此确定了档位修正量的隶属度函数。
模糊控制算法的模型如图3所示。当某一个时刻模糊控制系统的输入量为P和δ时,确定输出变量ΔR,将输入量和输出量的论域关系进行反模糊化,其实际数值即为对应换挡规则。
3 试验
3.1 负载试验
固定拖拉机踏板的位置,调节拖拉机的负载,通过电压和电流变速器测量拖拉机不同载荷情况下的蓄电池的输出电压和电流及驱动级的转速,验证该动力系统输出是否能够满足要求。试验结果如表2所示。

表2 拖拉机不同负载下的各参数
由表2可知:随着负载的载荷增加,驱动轮的转速下降,转矩下降,输出电力逐渐增加,压降增大,从而为增加的载荷提供足够的动力需求。
3.2 档位调节试验
调节拖拉机踏板的位置,使拖拉机的档位分别处于Ⅰ~Ⅵ挡,采集不同位置蓄电池的电压,电流信号和驱动轮的转矩,试验结果如图4所示。
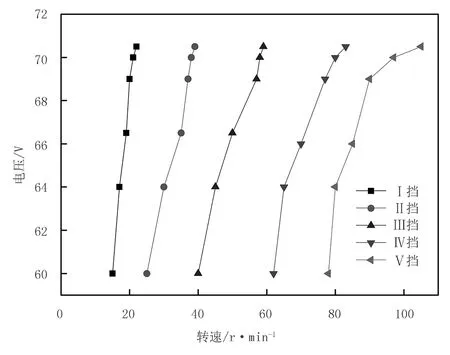
(a) 电压
由图4可知:在不同的档位,拖拉机的电压、电流和驱动轮的转矩变化趋势相同,电压随着转速的增加而增加,电流随着转速的增加而下降,驱动轮的转矩随转速的增加也呈下降趋势。
4 结论
1)针对电力驱动的拖拉机动力系统进行了设计和分析。该拖拉机的动力系统主要分为硬件部分和软件部分,硬件组成为驾驶引导模块、电源模块、动力输出模块和负载模块;软件部分为系统通道模块和数据存储模块。
2)对拖拉机的动力系统采用模糊控制原理进行控制,以提高拖拉机的动力和性能。
3)试验结果表明:拖拉机的动力系统可以为拖拉机的作业提供足够的动力,满足农业需求。
猜你喜欢
智富时代(2018年9期)2018-10-19
智富时代(2018年9期)2018-10-19
西南交通大学学报(2016年3期)2016-06-15
电子制作(2016年21期)2016-05-17
工业设计(2016年11期)2016-04-16
通信电源技术(2016年5期)2016-03-22
电源技术(2015年11期)2015-08-22
河南科技(2015年2期)2015-02-27
电测与仪表(2014年15期)2014-04-04
客车技术与研究(2014年5期)2014-02-28