
基于目标回波特征信息的改进型概率数据互联算法
2020-10-13 13:27党腾飞高一栋
火控雷达技术 2020年3期
党腾飞 牟 聪 高一栋
(西安电子工程研究所 西安 710100)
0 引言
雷达数据处理的主要是对雷达信号处理后的一次点迹进行预滤波、凝聚、起航、互联跟踪及航迹库管理等。此过程抑制测量过程中引入的随机误差,对控制区域内的目标运动轨迹和相关参数(如速度和加速度等)进行估计,预测下一时刻的位置,形成稳定航迹,对目标实时跟踪[1]。
航迹的维持跟踪是在航迹起始后,形成稳定航迹的阶段。此阶段的跟踪算法,主要分为极大似然贝叶斯类和多目标数据互联算法两大类。其中贝叶斯类算法主要有最近邻域算法(NNSF)、概率数据互联算法(PDA)和联合概率数据关联算法(JPDA)[2-3]。NNSF算法简单,但是不适用于杂波较多的环境;PDA算法将跟踪波门中可能的杂波和目标回波加权作为等效回波,但是PDA中量测的条件概率计算过于繁琐,其假设波门中的虚假量测个数服从泊松分布,如果该参数估计不准,滤波误差将很大。JPDA算法中互联矩阵和互联概率的计算也比较复杂,计算量也是工程应用必须考虑的问题。另外,贝叶斯类互联算法主要利用目标的位置、多普勒速度等信息,但是随着雷达分辨率的提高,雷达回波信息中也含有目标的一些特征信息[4-5]。本文正是将目标的这些特征信息用于跟踪算法,以改善跟踪性能。
1 雷达目标识别
雷达回波特征提取与识别本质上来说就是目标识别。目标识别技术一般分为数据获取、预处理、特征提取和分类决策几部分。回波的特征提取与识别有一维波形信息和二维图像信息的提取[6]。本文将这些特征信息用于航迹跟踪。
假设信号处理阶段,根据目标回波提取了n个特征,其中一个特征为αj。如果k-1和k时刻,两次回波的特征αj满足一定条件,则认为两次回波此特征匹配,当n个特征达到匹配条件,则认为两次回波来源于同一类(或同一个)目标。
2 PDA算法分析
PDA算法依据的假设是:
1)航迹已经起始;
2)每一时刻的所有量测至多有一个真实量测,此事件发生的概率为PD;
3)正确量测服从高斯分布;
4)虚假量测服从均匀分布,虚假量测数服从泊松分布。
PDA算法的状态更新方程和更新状态估计对应的误差协方差为

(1)
其中K(k)为滤波增益,ν(k) 为组合信息。式(1)中每个量测的关联概率为βi(k)(β0(k)表示波门中没有目标回波的概率)。
(2)
式(2)中b和ei(k)分别为

(3)

(4)
其中S(k)为信息协方差,PD为目标检测概率,PG为门概率。PDA算法认为跟踪门中的每个量测都可能来自目标,只是概率不同。由式(1)到式(4)可以看出,关联概率βi(k)与ei(k)成正比(和νi(k)成反比),也就是说当量测偏离航迹预测中心越远,其概率越小。另外,跟踪波门的大小是信息协方差S(k)的倍数,可以看出βi(k)与S(k)成反比,也就是说残差越大,量测和预测中心距离一定的情况下,量测来自目标的概率会降低。一般跟踪算法中,波门大小确定,利用PDA算法中量测距离预测点距离越远,来自目标的概率越低的思想,可以简化PDA算法。
3 方法设计
3.1 跟踪波门设计

(i=1...n)
(5)
时,量测Y(k)为候选量测。式(5)中KG为波门常数,


图1 矩形波门
图1中阴影部分以外的矩形圈是机动波门,当目标落入外层矩形圈,则认为目标发生机动。根据实际情况,性能优越的跑车即便发生机动,百公里加速最快2.5 s,机动波门宽度σm约为6 m,因此算法设计中机动波门可以小于此值。
3.2 改进的PDA算法设计
设波门关联门限为γ=KGσr,当目标i落入跟踪波门时,即
(6)
由以上分析可知,波门大小确定, PDA算法中量测距离预测点距离越远,来自目标的概率ρi(k)越低。因此令
(7)
考虑到完备性,最终量测i的概率为
(8)
将式(8)带入式(1),可得k时刻目标估计值。
3.3 回波特征信息的提取
回波特征信息包括一维波形信息和二维图像信息。一维信息中单一回波特征量包括回波宽度、回波围成的面积、编码熵、分形维和小波分解等[7-8]。
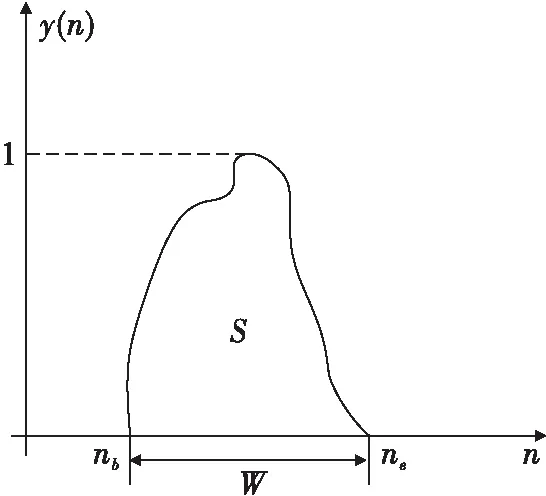
图2 回波特征定义
如图2所示,回波宽度如式(9),其一定程度反应了目标的大小信息。
W=ne-nb
(9)
本文仅利用回波宽度作为目标的回波特征信息,用于目标发生机动时的航迹更新。设目标k-1和k时刻的回波宽度为W(k-1)和W(k),当满足
(10)
时,认为前后两时刻目标回波宽度匹配。ψ为回波宽度变化门限,此值可根据经验设定。此值若为30%,表示当前时刻目标回波宽度相对于前一时刻变化了30%,小于此值,认为前后两时刻目标匹配。
3.4 算法设计
本算法对量测滤波分两步:
1)当量测落入跟踪波门(图1阴影)时,用3.2节中的改进的PDA算法对量测滤波估计。
2)当量测落到跟踪波门以外但是在机动波门内时,认为目标发生机动,此时用3.3节中方法对目标前后两时刻匹配,若匹配上,利用匹配上的量测值更新航迹。如果有多个量测值满足3.3中的匹配条件,用最近邻法航迹更新。
4 仿真实验
共进行200帧目标跟踪仿真,量测误差x和y方向都是5 m。目标从(x,y) =(100,200)处以x方向2 m/s,y方向20 m/s匀速运动,120帧时x方向加速度2 m/s2运动5帧,然后匀速运动。如图3所示,从跟踪效果看,传统PDA算法在122帧时目标丢失断航。在PDA算法和改进算法跟踪的122帧里,两者跟踪精度分别是3.48 m和3.63 m,本文算法相比PDA算法精度略差,但是本文算法能够应对目标机动情况,算法适应性更强,适合工程应用。
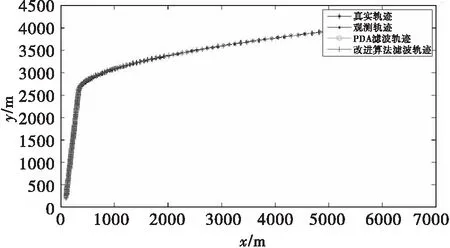
图3 跟踪轨迹对比
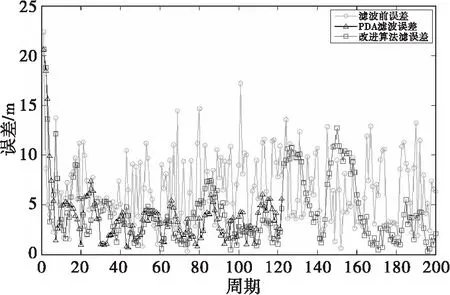
图4 跟踪误差对比
5 结束语
本文简化了PDA算法,常规跟踪波门基础上添加机动波门,将目标回波特征信息用于航迹滤波更新。但是PDA算法本身仅仅考虑了单目标跟踪,没有考虑多目标跟踪时波门交错,一个波门中可能有两个以上的目标回波的情形。基于目标特征信息的目标识别技术近年来发展迅速,如果能将更多的回波特征信息用于目标跟踪,本算法便能更加完善。
猜你喜欢
北京航空航天大学学报(2022年7期)2022-08-06
舰船科学技术(2022年11期)2022-07-15
舰船科学技术(2022年10期)2022-06-17
考试与评价·高二版(2021年1期)2021-09-10
雷达科学与技术(2020年4期)2020-09-11
当代陕西(2019年12期)2019-07-12
汉语世界(The World of Chinese)(2019年1期)2019-03-18
人生十六七(2015年5期)2015-02-28
销售与市场·管理版(2009年21期)2009-09-03
