
主动防护雷达多径效应抑制方法
2020-10-13 10:48李慧敏张汉光
火控雷达技术 2020年3期
马 可 李慧敏 张汉光 王 毅
(西安电子工程研究所 西安 710100)
0 引言
主动防护雷达是坦克、装甲车辆硬杀伤主动防护系统[1]的重要组成部分,主要功能是探测一定区域内的高速运动目标,精确测量目标距离、方位、俯仰和速度,判断目标威胁性,对测量数据进行滤波处理,输出滤波数据,为火控解算提供数据源。由于观测目标的轨迹通常是贴地飞行,因此探测时的多径效应严重影响着雷达的精度,从而导致主动防护系统拦截效率降低。
雷达的多径效应抑制技术可以根据不同雷达的应用场景综合实现[2]。本文针对主动防护雷达的应用特点,从数据处理方面入手,通过实测数据分析,提出了一种基于分组选择算法的多径抑制方法,该方法可以有效降低多径效应对主动防护雷达的影响。
1 多径效应影响分析
主动防护系统是坦克装甲车辆用于拦截、摧毁或迷惑敌方来袭弹药,使之不能命中的自卫系统。系统由以下三大部分组成:第一部分是战场威胁探测告警系统,负责感知车辆所受的战场威胁;第二部分是信号处理及决策系统,负责对威胁信号进行处理、分析并做出对抗决策;第三部分是综合对抗系统,负责响应决策执行对抗。对于拦截型主动防护系统,其对抗形式是利用中近距离反导防御系统,在敌方弹药击中车辆前对其进行拦截和摧毁[3]。
为保证拦截弹药准确地与来袭目标交会,进而对其造成毁伤,需要获得来袭目标的距离、速度、方位等信息。通常利用安装在坦克装甲车辆不同方位的多部主动防护超近程探测雷达,来实现对于车体周向的全方位探测[4]。
本课题设计的主动防护系统主要工作流程如图1所示。当坦克装甲车辆进入作战状态后,主动防护雷达进入搜索状态,对作用范围内的区域进行目标搜索,此时雷达对探测到的原始数据进行预处理,当发现有目标攻击车辆时,转入跟踪状态并向系统主控制器输出经过滤波的航迹数据;主控制器收到雷达给出的数据后,进行航迹拟合与弹道外推,并利用外推数据调转拦截弹药发射器,使拦截弹对准目标的来袭方向,经过火控解算适时发送点火信号发射拦截弹药对来袭目标进行毁伤[5]。

图1 主动防护系统工作流程
由于主动防护雷达安装在车体上,安装高度很低,而且探测目标主要是贴地飞行的反坦克火箭弹、导弹等,使得目标直接回波和地面反射回波共同进入接收天线,形式上相当于雷达同时探测到两个目标:真实目标和其镜像。多径效应[6]使得这两个目标的回波信号叠加,且叠加模式随着距离而起伏变化,导致俯仰测角值精度降低[7],如图2所示。俯仰测角精度低会使得拦截弹药发射器调转不到位,最终会导致主动防护系统拦截概率降低。
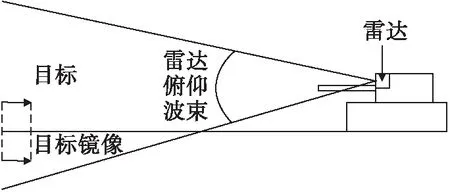
图2 主动防护雷达多径效应
为了具备对同一方向来袭目标的多次拦截能力,现代主动防护系统拦截弹药发射器逐渐由固定安装式向随动转台式发展[8-9]。因此,主动防护雷达需要提供精确的目标信息,才能保证主动防护系统的拦截概率。所以必须克服多径效应对主动防护雷达的影响。
2 多径效应抑制方法
多径效应对于雷达的俯仰测角影响较大[10]。地面发射的反坦克火箭弹、导弹的飞行高度一般与坦克装甲车辆底盘高度相当。雷达在探测此类贴地飞行的高速小目标时,受多径效应影响,俯仰测角出现高低起伏,测角性能恶化[11],部分情况下无法满足拦截系统精度要求。通常抑制多径效应的方法有:提高雷达高度[12]、偏轴跟踪技术[13]、采用垂直极化[14]等,本课题在采用了上述方法后,经过外场试验采集数据表明,多径效应对雷达的影响有所改善。但在某些环境下,仍然不能满足主动防护系统对雷达俯仰测角精度的要求。主动防护雷达在采用上述抑制多径效应方法后的某次俯仰角实测结果如图3所示。
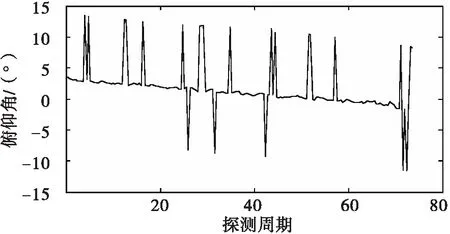
图3 实测俯仰角数据
由于雷达使用环境已经确定,上述抑制多径效应的方法只能起到部分作用。因此,考虑在将航迹数据输出给主控制器前,通过数据处理的方法,用分组选择算法将受多径效应影响的俯仰角测角野值剔除、真值保留,以达到抑制多径效应的效果。该分组选择算法的步骤如下:
1)将主动防护雷达测量得到的原始俯仰角数据前M个依次做差,并记录差值与数据的对应关系;
2)将得到的差值从小到大进行排序,将差值按照一定间隔将M个数据分成N组;
3)统计N组内每组数据点的个数;
4)将数据点最多的那一组数作为真值,并进行平滑滤波;
5)从第M+1个数据开始向主控制器输出滤波后的航迹数据;
6)第M+1个数据后,每次数据处理时将俯仰角数据与之前时刻俯仰角数据的滤波值进行做差,观测差值是否稳定,如异常即剔除,并进行外推。
步骤2中的数据间隔可以通过应用文献[15]中的自适应门限选择法来确定。步骤4中的平滑滤波可以利用最小二乘法[16]来实现。采用上述分组选择算法进行俯仰角数据处理后,可以有效降低多径效应对雷达探测的影响。在实际处理中,应结合雷达测量目标的其它信息,进行综合的数据处理。
3 实测结果
将上述基于分组选择算法的多径效应抑制方法集成到主动防护雷达数据处理软件中,并在不同的试验场地对其进行测试,试验中的目标为距离地面高度1~2 m的高速小弹丸。试验中选取M=21。图4、5、6、7分别为主动防护雷达在平坦的草地、柏油路、凹凸不平的草地以及戈壁滩的试验场地实测俯仰角原始数据和输出数据对比图。
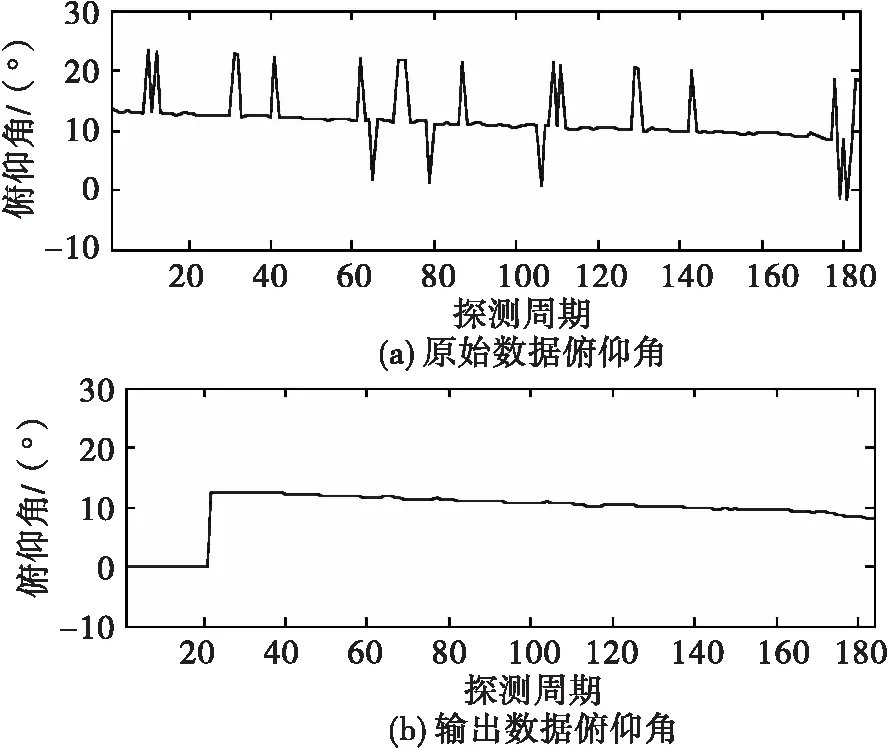
图4 平坦的草地
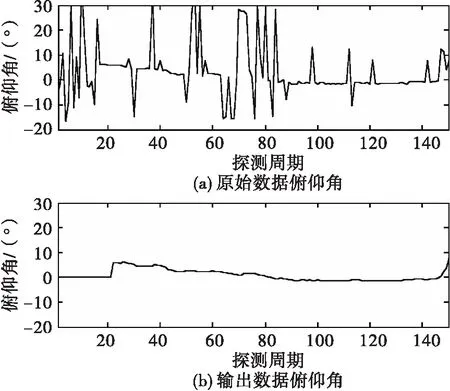
图5 柏油路面
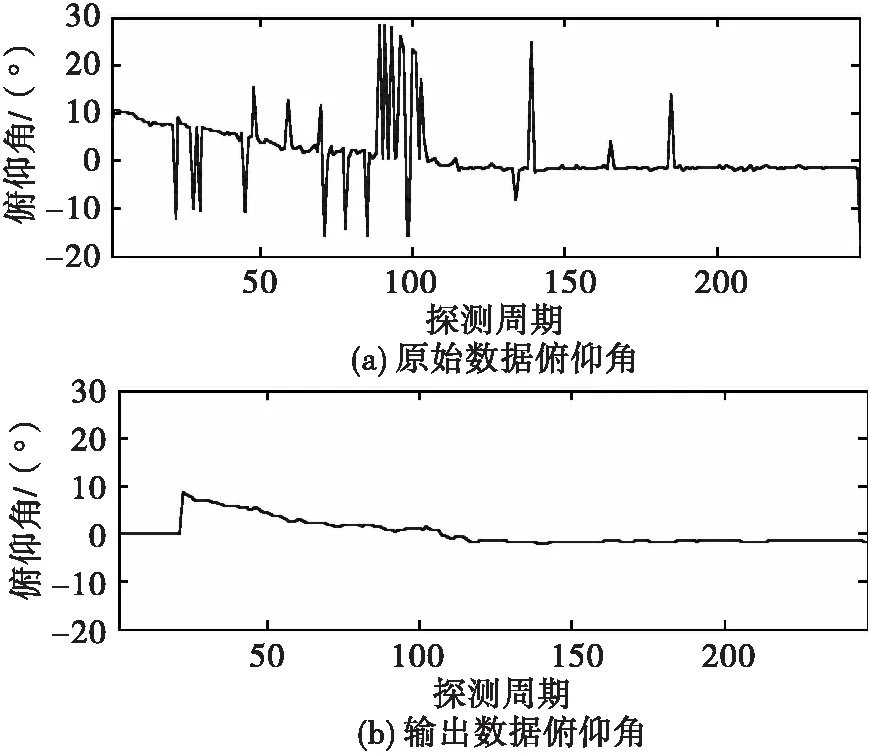
图6 凹凸不平的草地

图7 戈壁滩
从不同试验场地的试验实测结果来看,不同场地的多径效应对雷达俯仰角原始数据的影响不同。在采用了上节多径效应抑制方法后,主动防护雷达向主控制器输出的俯仰角数据平稳,不同试验场地的俯仰测角精度对比如表1所示。从表1中可以看出,经过上节方法处理的数据精度明显提高。
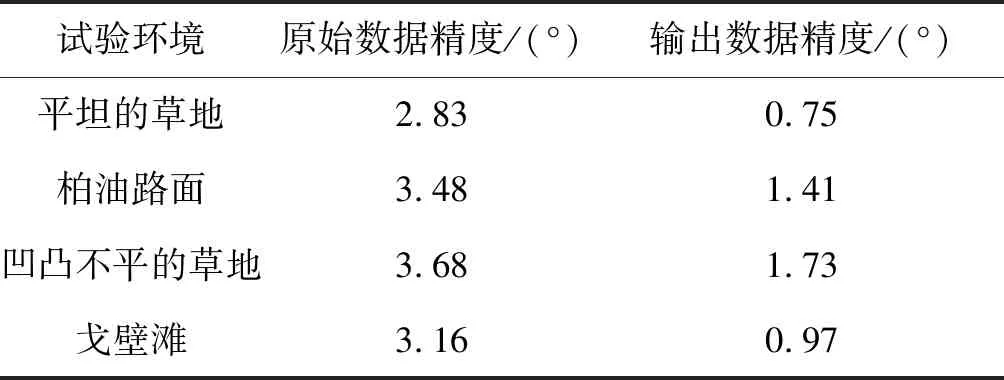
表1 俯仰测角精度对比
4 结束语
多径效应对于主动防护雷达俯仰测角精度影响较大。采用基于分组选择的俯仰角数据滤波算法,并结合常用的抑制多径效应的方法,可以使雷达的俯仰角测量精度提高。并通过在不同环境条件下的外场试验,验证了该方法的有效性。这种方法已经在某型主动防护雷达中得到了工程应用。
猜你喜欢
导航定位学报(2022年5期)2022-10-13
机械工业标准化与质量(2022年8期)2022-10-09
农业工程学报(2022年10期)2022-08-22
舰船电子工程(2022年6期)2022-08-02
小学生学习指导(低年级)(2019年3期)2019-04-22
小学生学习指导(低年级)(2018年9期)2018-09-26
小学生导刊(低年级)(2017年1期)2017-06-12
计算机应用(2016年10期)2017-05-12
华人时刊(2016年16期)2016-04-05
职业·中旬(2009年12期)2009-06-01
