圆形薄膜太阳翼展开动力学分析与模态分析
2020-10-12 06:26荣吉利宋逸博刘志超辛鹏飞
宇航学报 2020年9期
荣吉利,宋逸博,2,刘志超,辛鹏飞
(1. 北京理工大学宇航学院,北京 100081;2.中国运载火箭技术研究院, 北京 100076; 3. 空间物理重点实验室,北京 100076;4. 北京空间飞行器总体设计部,北京 100094)
0 引 言
随着航天器能源的供给要求以及航天器小型轻量化要求的提高,应用于太空的空间可展开机构得到了迅速发展[1-2],出现了以日本IKAROS[3]为代表的薄膜太阳帆[4],大型可展开桁架索网天线[5]以及可展开薄膜天线[6]等。2006年,美国ABLE(现为ATK)公司研发出一种圆形的柔性毯式太阳电池阵UltraFlex[7-9]如图1所示,其具有结构紧凑、质量轻、功率质量比高、转动惯量低、展开刚度高和扩展性好等特点,有非常广泛的应用前景。然而由于其展开面积大,且地面试验难以模拟太空环境,因此必须使用数值分析的方法对其进行仿真计算,并指导设计工作。2013年,NASA针对超柔性UltraFlex-175太阳翼[8-9]用有限元软件ANSYS进行模态分析,充分考虑到重力悬吊系统及空气作用的影响,得到了超柔性太阳翼的前三阶全局模态,并进行了地面模态试验进行验证。但NASA的数值仿真缺少对展开过程的动力学分析。文献[10-12]基于连续介质力学和有限元方法提出的绝对节点坐标法(ANCF)是柔性多体系统动力学发展的一个里程碑,与传统柔性多体系统建模方法相比,该方法在惯性坐标系下采用统一的插值函数描述柔体的刚体运动与弹性变形,非常适用于描述同时具有大转动和大变形的柔体动力学。刘铖[13]利用绝对节点坐标法对薄膜结构进行建模,研究了薄膜的褶皱、屈曲等动力学特性,仿真结果与其他理论研究方法结果吻合得很好,并具有常数质量矩阵、无科氏力和离心力等优点。朱挺[14]利用绝对节点坐标法对薄膜结构将经历大范围刚体转动与大弹性变形的刚柔耦合运动进行数值分析,对展开过程涉及薄膜间复杂的接触/碰撞问题进行了分析,着重考虑了展开过程的接触碰撞问题,但缺少对影响太阳翼展开平稳性的参数分析及优化设计指导。
本文对UltraFlex太阳翼建立了全尺寸模型,使用膜单元模拟柔性翼面,在充分考虑展开过程中刚柔耦合因素以及薄膜自接触碰撞问题的情况下,利用有限元软件SAMCEF的隐式非线性分析方法对圆形薄膜太阳翼进行展开动力学分析。通过分析圆形薄膜太阳翼展开过程中能量变化曲线,研究了不同转角控制函数对其展开稳定性的影响,并给出了指导意见。利用非线性静力学分析获得的刚度矩阵及质量矩阵,对锁定状态下圆形薄膜太阳翼进行模态分析,并将分析得到的结果与NASA的仿真数据和试验数据进行比对,验证了SAMCEF含重力卸载弹簧太阳翼有限元数值模型的准确性和有效性。

图1 UltraFlex太阳能电池阵列Fig.1 UltraFlex solar array configuration
1 动力学仿真
1.1 动力学建模
本文采用通用有限元软件SAMCEF Field对圆形太阳翼的折叠结构进行参数化建模。由于静止导板和运动导板相对于支撑梁和薄膜结构刚度较大,几乎不发生变形,且其形状对太阳翼展开过程无影响,因此将两个导板简化为两个刚性梁。中心展开机构的转动铰链简化为相邻支撑肋条之间的转动副。通过第一类拉格朗日方程可以得到用于描述多体系统动力学特性的微分-代数方程组
(1)
式中:M为系统的质量矩阵,q为系统的广义坐标,Fint,Q,Fc分别为弹性力、广义外力以及广义接触力矩阵,Φ,Φq分别为系统约束方程及其对广义坐标的Jacobi矩阵,λ为Lagrange乘子矩阵。
求解上述动力学方程的方法可分为显式和隐式两类方法。对于多柔体系统动力学问题,特别是具有大变形的多柔体系统动力学问题,显式算法的条件收敛特性会带来对积分步长的限制,故一般采用隐式算法求解。基于上述考虑,软件分析类型选择结构分析(Structural Analysis),求解器选择SAMCEF求解器,求解方法为隐式非线性(Implicit Non Linear)。对于只有接触力的线弹性系统,其动力学方程为:
(2)
采用中点法则对方程进行离散:
(3)

(4)
式中:B为线性应变,τ为Kirchhoff应力,Ω0为单元积分域,G为变形梯度,e为单元的广义坐标,E为Green-Lagrange应变张量,C为弹性张量,Gn+1/2是指由中点构型φn+1/2所确定的变形梯度。
此外,在建模时充分考虑了使用壳(shell)单元和膜(membrane)单元对翼面展开特性的影响。薄壳单元有5个自由度,包括三个平动自由度和两个转动自由度,可以描述弯曲变形。而膜单元只有三个平动自由度,只能传递面内张力,不能承受弯曲及剪切,变形较大,可以更好地反映出真实翼面的柔性大变形特性。
图2和图3分别给出了壳单元与膜单元折叠结构展开过程的模拟。从图2~3可以看出,由于壳单元的面外刚度较大,在折痕处产生了非常大的应力,难以完全展开。当展开比例为99%时计算被终止,此时薄膜结构折痕处应力达到了19.94 MPa,而其他部分应力较为均匀,约为0.25 MPa。采用膜单元时,由于没有面外刚度,整个结构自然展开,过程中出现了明显的褶皱,与真实情况相一致。展开完成后,中间无折痕,整个薄膜结构完全展开,薄膜表面的应力比较均匀,约为8.8 MPa。由此可见,相比于壳单元,采用膜单元能够更加真实地描述整个展开过程的翼面行为。
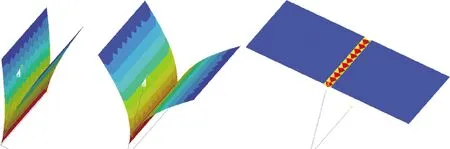
图2 壳单元展开比例及应力分布Fig.2 Expansion ratio and stress distribution of shell element

图3 膜单元展开比例及应力分布Fig.3 Expansion ratio and stress distribution of membrane element
根据圆形薄膜折叠结构的几何尺寸进行几何模型构建,圆形薄膜太阳翼结构主要由12根支撑梁和10片折叠梯形膜片组成,支撑梁与膜片在共节点处绑定连接,折叠时支撑梁并排布置。薄膜厚度为0.5 mm,单根支撑梁长3000 mm,相邻梁间距为6 mm。10片折叠的梯形膜片首尾相连,形成一个扇形的折叠结构,在中心电机的驱动下展开后呈正十边形。网格模型如图4所示。

图4 圆形薄膜太阳翼折叠、展开有限元模型Fig.4 Finite element model for the folding and unfolding circular thin film solar wing
1.2 展开过程模拟
圆形薄膜太阳翼展开过程中,薄膜与支撑梁之间存在接触碰撞作用,且薄膜之间也会相互接触碰撞。如果展开速度过快,薄膜运动幅度过大容易相互碰撞缠绕产生大量褶皱,加剧展开过程的振动,若膜面褶皱处应力过大,极易使膜面遭到破坏,导致展开失败。因此对圆形薄膜太阳翼展开过程中的位移变化和应力变化进行研究,具有重要的工程意义。仿真模型考虑了膜面自接触碰撞,动力学仿真从开始展开到完全展开共用时60 s,为了研究展开后的残余振动,在完全展开后保持锁定状态6 s。
图5为展开过程的Z向位移云图。
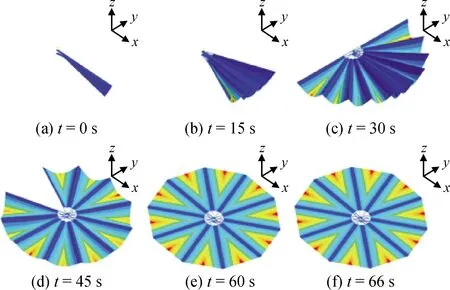
图5 圆形太阳翼展开过程Z向位移云图Fig.5 Z-directional displacement of the circula solar wing
1.3 展开过程能量变化
圆形薄膜太阳翼在无重力条件下展开过程中,会涉及外力做功、应变能与动能之间的相互转化,本文进行圆形太阳翼展开动力学分析过程中没有考虑部件之间的摩擦,因此只有前三种能量相互转化,图6给出了动能、外力做功、应变能随时间变化的曲线。由图6可知,外部电机做功,将能量转化为动能和应变能。t=30 s时角速度达到最大,但动能未达到最大,这是由于电机驱动使太阳翼展开,到达最大速度后由于惯性太阳翼的速度继续增大;t=35 s时,太阳翼的动能达到了最大,之后逐渐减小;t=56 s之前,太阳翼的应变能几乎为0,之后开始急剧变大,原因是薄膜急剧张紧,造成了膜结构的变形;t=60 s至t=66 s之间,应变能基本保持不变,太阳翼的动能逐渐减小。由图6中总能量曲线可知,圆形薄膜太阳翼展开过程中符合能量守恒定律。
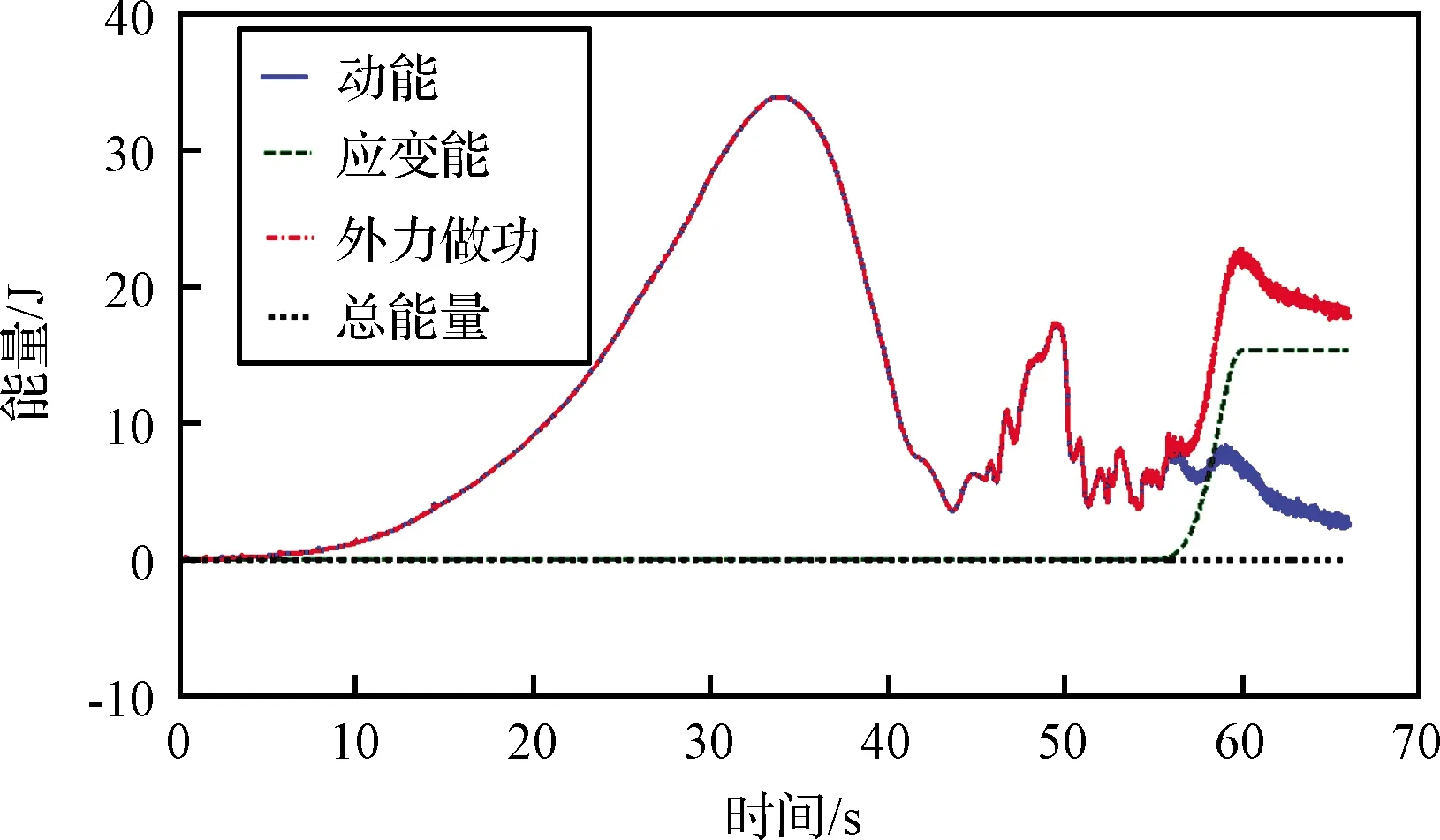
图6 太阳翼展开过程中能量变化曲线Fig.6 Energy curve during the development of the solar wing
1.4 控制函数对稳定性的影响
规划完全展开的时间为60 s,展开角度为360°。为了满足展开过程平稳且展开后残余振动小的需求,研究了不同控制函数对展开稳定性的影响。
1.4.1多项式控制函数
多项式是最常见的轨迹控制函数,三次多项式能保证转角以及角速度的光滑连续,但不能满足角加速度的边界条件;五次多项式能满足角度、角速度以及角加速度的边界条件,但是包含高阶函数,容易引起振动。
1)低阶转角控制函数
低阶转角控制函数包括线性控制函数,二次多项式和三次多项式。低阶控制函数需要参数少,控制方式简单,但展开过程平顺性不如高阶控制函数。
2)五次多项式转角控制函数
若初始时刻t=0以及结束时刻t=tf转角、角速度以及角加速度已知,那么可采用五次多项式对转角函数进行设定:
(5)
式中:a0,a1,a2,a3,a4,a5均为常系数。
1.4.2摆线运动转角控制方程
摆线运动也可用来规划太阳翼展开轨迹,这种规划方法不仅计算简单,而且运动轨迹连续平滑,并能在有限区间的端点产生零速度和零加速度,有效地保证了系统运动的平稳性。
采用摆线运动来规划太阳翼展开轨迹,展开轨迹如下:
(6)
式中:θ0为初始角度,θf为完全展开角度。
1.4.3余弦函数转角控制方程
余弦函数转角控制方程的形式如下:
(7)
为了研究不同的控制函数对太阳翼展开稳定性的影响,图7给出了几种典型类型控制函数驱动下太阳翼展开过程中动能变化曲线。

图7 不同控制函数驱动下动能变化曲线Fig.7 Dynamic curve of kinetic energy driven by different control functions
由图7可知,当太阳翼展开的时间相同时,余弦控制函数使太阳翼获得的最大动能最大,线性控制函数使太阳翼获得的最大动能最小;线性控制函数使太阳翼展开过程中动能保持平稳变化,有利于太阳翼的稳定展开,但展开后期动能增幅很大,展开锁定状态下残余振动非常剧烈,容易造成太阳翼的结构破坏,因此整体来看不利于太阳翼的平稳展开;二次控制函数与三次控制函数不满足展开后角加速度为零的条件,但展开过程中动能幅值较小,且动能变化趋势比较平滑,展开锁定后残余振动较小,整体来看有利于太阳翼的平稳展开;五次控制函数与摆线控制函数使太阳翼展开过程中动能变化趋势平滑,展开后期无动能的大幅值波动,展开锁定状态下对残余振动的抑制效果也比较明显,但从整体看,展开过程中以及展开锁定后,摆线控制函数的抑振效果更强;余弦控制函数使太阳翼展开初始阶段动能增长缓慢,后期快速增长至最大动能后又快速减小,但对残余振动的抑制效果最优。
综合考虑太阳翼展开过程中和展开锁定后动能的趋势发现,在不超出动能限定范围内时,余弦控制函数能使太阳翼平稳展开,并且具有最优的残余振动抑制效果。
2 悬吊状态的太阳翼模态分析
圆形薄膜太阳翼在进行地面模态试验时,为了模拟太空中的失重环境,需要对结构的所受的重力进行卸载,将重力卸载弹簧的一端固定在支撑梁上,固定位置为支撑梁与相邻两个半翼片的重心处,然后,对悬吊点进行调平,当所有的支撑梁处于同一水平面时,认为恰好卸载了结构所受的重力,此外,重力卸载弹簧还具有保护太阳翼结构的作用。
实际的试验过程中,重力卸载弹簧会对太阳翼结构产生附加约束作用以及随动质量作用,因此对试验结果会造成一定的影响,为了探究重力卸载弹簧对太阳翼模态的影响,本部分利用悬吊状态的太阳翼有限元模型进行模态分析,由于有限元模型中的接地弹簧单元没有质量,因此分析过程中只考虑了卸载弹簧对太阳翼的附加约束作用。分析得到的前三阶模态振型如图8所示。表1给出了利用SAMCEF Field和ANSYS对太阳翼进行模态分析得到的前三阶模态的固有频率以及误差百分比。
由表1可知,利用SAMCEF对悬吊状态的太阳翼进行模态分析得出的前三阶模态振型,与NASA利用ANSYS分析的模态振型基本完全一致;利用SAMCEF分析得到的太阳翼的前三阶固有频率与NASA仿真数据吻合极好,误差控制在2%以内;SAMCEF得到的前六阶固有频率值均低于ANSYS分析数据,原因是NASA对圆形薄膜太阳翼进行分析时,薄膜单元选的为壳单元(shell),而利用SAMCEF Field进行分析时,选用的是膜单元(membrane),膜单元没有面外刚度,因此SAMCEF有限元模型柔性更大,因此得到的固有频率略低于ANSYS分析数据。
为了验证利用SAMCEF Field对悬吊状态的圆形薄膜太阳翼进行模态分析的有效性,将SAMCEF模态分析得到的太阳翼的面内振动频率、“摇摆”模式谐振频率以及“跳水板”模式谐振频率与NASA在真空舱对UltraFlex-175太阳翼进行模态试验得到的数据进行对比,结果如表2所示。
由表2可知,利用SAMCEF分析得到的频率数据与NASA试验测试数据吻合较好,摇摆模式谐振的固有频率误差最大,达到了6.34%,原因可能是实际试验状态下,激振器激振时的附加刚度、加速度传感器和重力卸载系统的附加刚度以及随动质量,对太阳翼的模态造成了一定影响,而利用SAMCEF进行有限元建模时,没有考虑到激振器、加速度传感器以及重力卸载装置的附加刚度和随动质量,因此产生了较大的误差。

图8 悬吊状态的太阳翼前三阶模态振型Fig.8 The first three modes of vibration of suspended solar wing
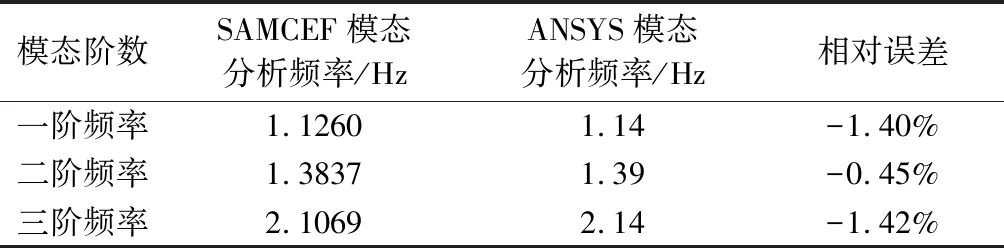
表1 悬吊状态的太阳翼前六阶模态固有频率Table 1 The first six natural frequencies of suspended solar wing

表2 SAMCEF分析数据与NASA试验数据对比Table 2 SAMCEF analysis data compared with NASA test data
3 结 论
本文采用有限元数值分析的方法,在NASA模态分析数值模型的基础上,建立了圆形薄膜太阳翼展开动力学模型,以不同的展开控制函数为变量,研究了不同控制函数对展开平稳性的影响,并对展开锁定后的太阳翼进行了模态分析。该研究对于圆形薄膜太阳翼进行地面模态试验以及结构设计具有一定的指导意义和科学价值。
经过研究获得主要结论如下:
1)膜单元比壳单元在模拟薄膜类展开机构时有更好的效果,更能反映真实情况。
2)通过使用膜单元对圆形薄膜太阳翼进行动力学分析可以发现,展开初期较为平稳,但在展开后期由于翼面碰撞使得展开过程产生剧烈的振动,容易导致展开失败;薄膜张紧后翼面存在持续的颤动。
3)通过对太阳翼展开轨迹进行规划可以发现,高阶控制函数、摆线控制函数以及余弦控制函数均有利于太阳翼的平稳展开,余弦控制函数使太阳翼获得的动能最大,但具有最优的残余振动抑制效果,因此推荐使用余弦控制函数进行轨迹规划。
4)在考虑重力、卸载弹簧因素的情况下,利用SAMCEF可以完成展开锁定状态下太阳翼的非线性静力学分析以及模态分析,得到圆形薄膜太阳翼的固有频率与NASA仿真结果相吻合。
5)有限元模型模态分析的结果与NASA的试验结果相吻合,前三阶模态振型基本相同,模态频率分别相差-2.58%,6.34%和1.40%,符合美国TRL6的技术标准,因此验证了SAMCEF悬吊状态有限元数值模型准确性和有效性。
猜你喜欢
金桥(2022年4期)2022-05-05
党的生活(黑龙江)(2020年10期)2020-12-18
走向世界(2018年11期)2018-12-26
金桥(2018年4期)2018-09-26
人大建设(2018年7期)2018-09-19
创新时代(2017年9期)2017-10-09
广东第二课堂·小学(2017年9期)2017-09-28
儿童故事画报·发现号趣味百科(2016年7期)2017-02-08
小雪花·成长指南(2016年11期)2016-12-07
数学大王·低年级(2016年1期)2016-09-10