
基于无人机遥感的花生叶片叶绿素含量监测研究
2020-10-10 05:12刘仕元王帅斌谢冰丽张佳蕾陈婷婷万书波
花生学报 2020年2期
刘仕元,梁 晋,王帅斌,谢冰丽,张佳蕾,陈婷婷,万书波*,张 雷*
(1.华南农业大学农学院,广东 广州510642;2.山东省农业科学院生物技术研究中心,山东 济南250100)
氮素是作物需求量最大的矿质营养元素,氮素营养状况对作物叶绿素含量影响显著,可作为作物长势监测的一种有效指标[1-2]。作物叶片颜色的变化实质上是作物体内叶绿素含量的变化,而叶片叶绿素浓度与氮素含量之间有密切的关系[3]。但传统的叶绿素测算手段繁琐且难以实时监控,因此需要寻找一种快速无损的检测方法,为作物叶绿素的实时快速检测提供便利。
近年来,随着无人机技术的兴起,越来越多的学者利用无人机遥感对作物长势和生理状态进行评估,快速有效地对作物生长特征进行动态监测。通过提取叶片的颜色特征,利用线性拟合和逐步回归分析,建立黄瓜初花期叶片光合色素含量的颜色特征估算模型[4]以及锦橙叶片氮含量的回归模型[5]。结合数字图像技术,采用较低的飞行高度获取田块图像,得到较高精度的大田植株图像,可实现大田烟草缺苗数估测[6]。
目前国内外学者利用无人机可见光光谱对作物叶片叶绿素含量诊断方面已经有大量研究,且主要集中在油菜[7]、冬小麦[8]等作物,但利用无人机可见光影像进行花生叶片叶绿素含量反演的研究较少。因此,本研究应用无人机遥感平台搭载数码相机组成的可见光遥感系统,低空获取大面积花生冠层可见光光谱参数,结合神经网络算法,实现利用无人机遥感实时监测花生叶片叶绿素含量的动态变化,为快速、准确地测定花生养分状况提供依据。
1 材料与方法
1.1 材料与设计
试验于2018年8-12月在华南农业大学增城试验基地高产田进行。供试品种为花育22号和花育25号。试验点0~20cm土壤基础肥力状况:有机质15.31g/kg;碱解氮63.7g/kg;速效磷(P2O5)76.3mg/kg;速效钾(K2O)103.6mg/kg;交换性钙12.56g/kg;p H 7.6。采用起垄种植方式,垄距85cm,垄面宽55cm,垄高10cm,垄上2行花生,垄上小行距30~35cm,株距20cm,播深3.5~4.0cm,每穴2粒。试验设5个氮素水平,N0(不施氮,对照);N1(纯氮90kg/hm2);N2(纯氮150kg/hm2);N3(纯氮225kg/hm2);N4(纯氮300kg/hm2),3次重复,共30个小区。
1.2 花生冠层航拍图像信息的获取
采用大疆精灵4无人机为遥感平台,其搭载的影像传感器为1英寸CMOS,有效像素为2000万像素,最大飞行高度在120m以上,最大分辨率为4K。最大飞行时间28min,最大可控距离约5km。最高速度20m/s(72km/h)。分别在苗期(8月30日)、开花下针期(9月18日)、结荚期(10月1日)、饱果期(10月12日)、收获期(11月15日),选择晴天光线较强的时间10:00-14:00进行(太阳高度角大于45°)拍摄。并使用Pix4dmapper软件对无人机图像进行分析,获取试验田的全局遥感图像,最后通过ENIV对图像进行预处理,包括图片降噪,土地黑化等,以去除环境对实验结果的影响。
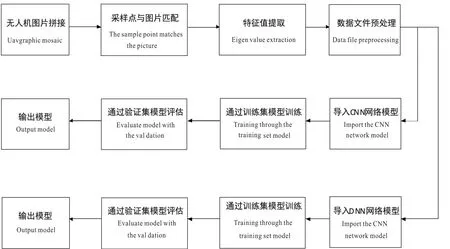
图1 无人机图片处理主要步骤Fig.1 Main steps of UAV image processing
1.3 样品采集与分析
本文使用SPAD叶绿素仪测定花生叶片叶绿素含量,每小区随机取4株植株并标注位置,在选取植株中测定植株3片功能叶并使用SPAD叶绿素仪测定叶绿素含量,使用3片叶的叶绿素含量平均值作为植株的叶绿素平均值,最终得到120个花生叶片叶绿素含量。
1.4 无人机图像处理
无人机图片处理主要包括图片拼接,图片降噪,图片分割和图像特征值的提取,如图1所示。
经过图片采样点匹配后进行特征值提取,后将提取数据按神经网络输入需求格式进行保存,在完成训练集和测试集的划分后用训练集进行模型的训练,并利用验证集判断模型的优劣。本文采用
Pix4dmapper软件对无人机图像进行拼接,使用Photoshop进行图片分割,使用ENVI进行图片特征值的提取,使用Python语言完成CNN和DNN模型的建立。
1.5 DNN网络模型的建立
深度神经网络(Deep neural network,DNN),包括输出层,输入层和隐藏层的神经网络系统,区别于传统浅层神经网络,DNN存在多层隐藏层,对数据特征的提取能力更强,分析的效果和速度更快。但是全连接DNN的结构中下层神经元和所有上层神经元都能够形成连接,从而导致参数数量膨胀,这不仅容易导致过拟合,也容易造成陷入局部最优。
为保证网络能充分学习数据特征而且不出现过拟合现象,经过多次实验,最终本文得到一组实验结果优越的网络结构,如图2所示:
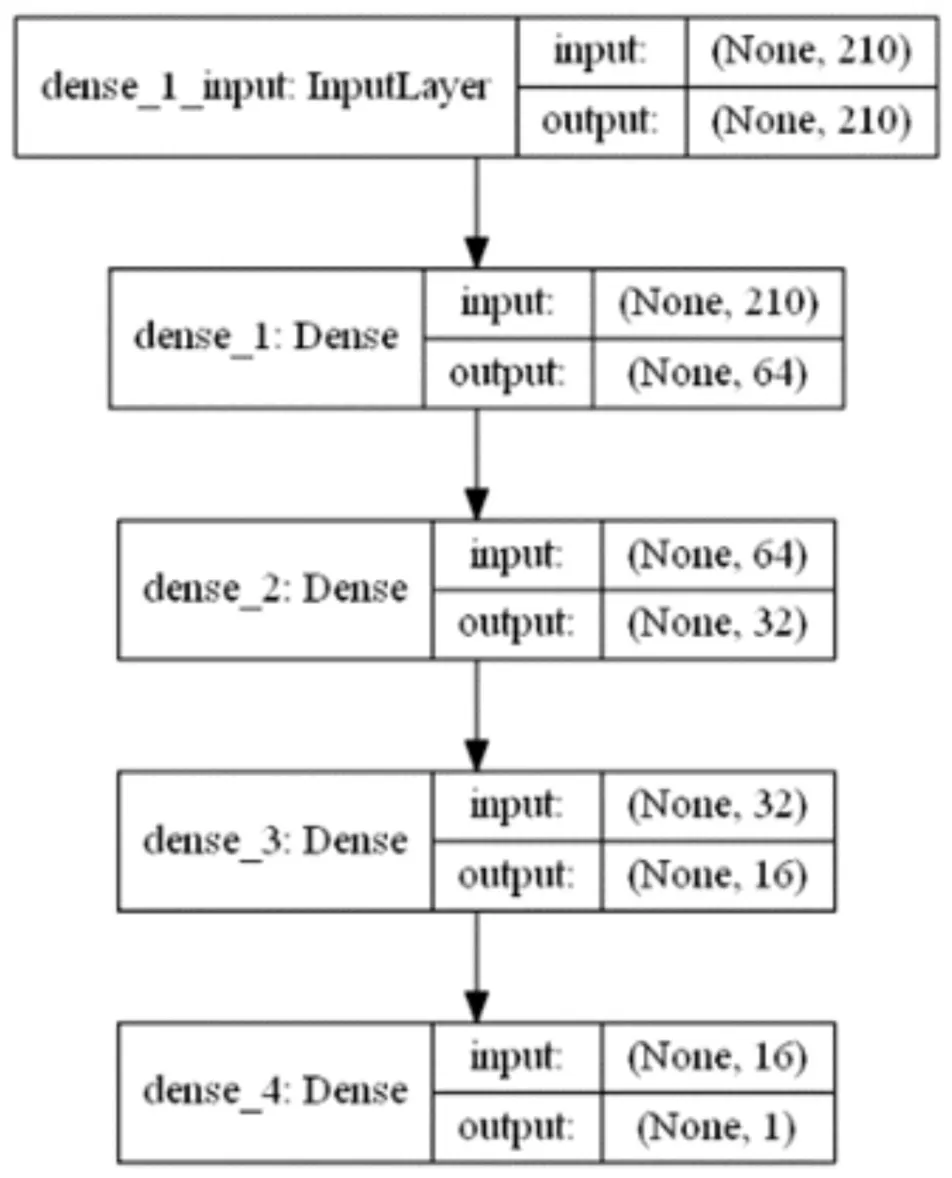
图2 DNN网络模型结构Fig.2 Structure of DNN network model
本文使用DNN网络共有4层,包括3层隐藏层(包含输入层)和1层输出层,在隐藏层中使用RELU为激励函数,输出层为线性函数,将模型的训练次数定位400次。
1.6 CNN网络模型的建立
卷积神经网络(Convolutional Neural
Network,CNN)是一种深度前馈人工神经网络,可基于梯度下降的方法进行训练得到模型参数。相比较传统的神经网络,虽然表征能力已经很强,两层的神经网络可近似表示所有函数,但是却很难训练。而卷积层的提出,在数据的各个区域上,使用数量较少的卷积核参数提取特征,并辅以池化层对数据进行降维,压缩数据和参数的数量,减小过拟合,并提高模型的容错性经过训练的卷积神经网络可学习数据的特征,从而预测植物叶绿素的水平[9]。
为保证网络能充分学习数据特征而且不出现过拟合现象,经过多次实验,最终本文得到一组实验结果优越的网络结构,如图3所示:
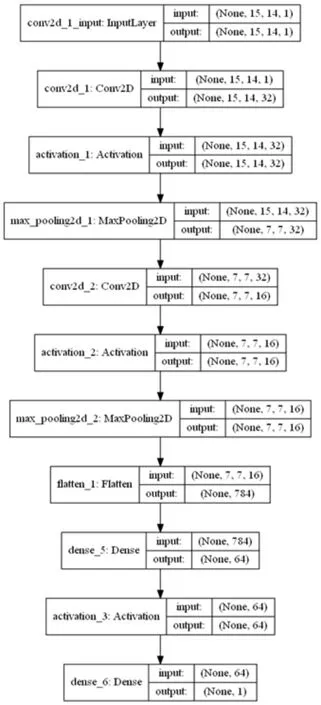
图3 CNN网络模型结构Fig.3 CNN network model structure
本文提出的7层神经网络,包括2个卷积层、2个池化层、2个全连接层和输出层组成,卷积层和池化层由多个特征图组成,每个特征图由多个神经元组成,每一层的特征图作为下一层的输入。本文使用RELU作为激励函数,卷积核大小均为5×5,步幅为默认值1。并采用最大池化为池化层的方法。模型的训练次数定位400次。
神经网络中输入14个图像特征参数为自变量,并输入叶绿素相对值为训练和模型估计提供依据,每个网络重复训练5次,获得其预测值数据,并计算实测值和预测值的平均相对误差和平均绝对误差。
2 结果与分析
2.1 施氮量对叶片叶绿素含量的影响
由图4可知,两个花生品种的叶片叶绿素含量均随生育进程呈先上升后下降的趋势,同一生育期不同施氮量比较发现,150kg/hm2氮处理叶绿素含量明显低于225kg/hm2和300kg/hm2处理。不同花生品种间比较发现,花育22号225kg/hm2处理叶片叶绿素含量最高,而花育25号品种300kg/hm2处理叶片叶绿素含量最高。
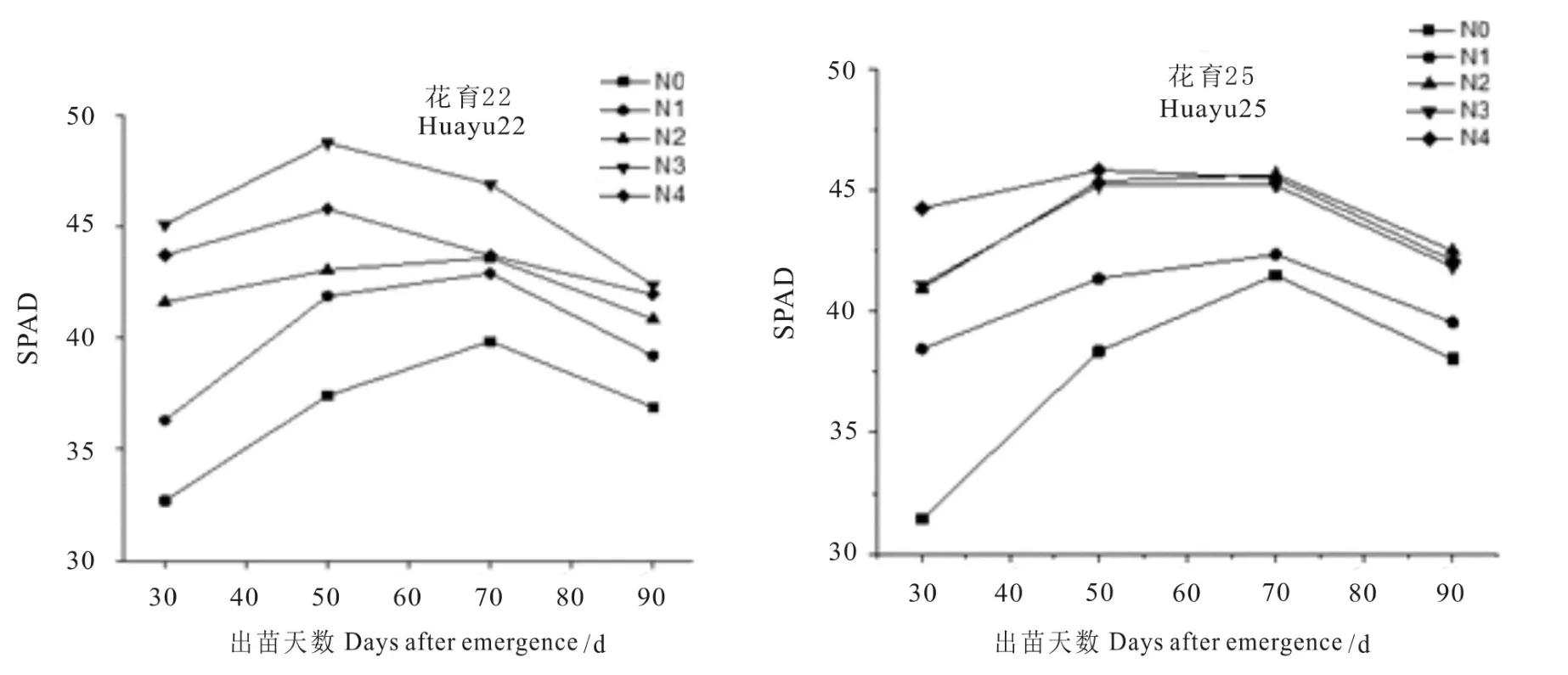
图4 施氮量对花生叶片叶绿素含量的影响Fig.4 Effect of nitrogen application on chlorophyll content in peanut leaves

图5 无人机拍摄拼接图片Fig.5 Mosaic images taken by UAV
分析可知,叶绿素含量的平均值为41.5475,最大值为58.0,最小值为26.6。同时本文随机选取96组数据为模型的样本集,24组数据为模型测试集。
2.2 多光谱影像的获取
当无人机完成图片拍摄后使用Pix4dmapper对图片进行拼接,并使用ENIV对图像参数进行提取。
2.3 遥感影像参数的获取
实验采集的无人机图像是可见光图像,在可见光图像中,R、G、B分量分别位于622~760 nm、492~577 nm、435~450 nm区间,而作物所含的叶绿素a与叶绿素b在435~450 nm和622~760 nm内存在光谱吸收,在492~577 nm内存在反射的典型特征,因此利用R、G、B以及由它们组合成的颜色特征植被指数可用于花生叶片叶绿素检测[10-11]。因而本文建立了红光、绿光、蓝光、归一化红光、归一化绿光等参数建立检测模型。所使用的图像特征参数及计算公式见表1。

表1 图像特征参数及其计算公式Table 1 Image feature parameters and their calculation formulas
2.4 神经网络的建立
使用pycharm作为编辑器,使用python作为编辑语言,将数据以Excel格式导入,并使用神经网络算法对数据进行分析。
2.5 神经网络输出结果的比较
理想的神经网络输出的预测值应该和农学的测量数据非常接近,平均相对误差和平均绝对误差应该向0靠近。由表2、图6可知,DNN的样本集预测值和农学实测值训练集的平均绝对误差在0.80~0.92之间,测试集在8.7~8.9之间。而CNN的预测值和农学实测值训练集的平均绝对误差在1~2之间,预测集在5.8~6.6之间。说明CNN模型对参数变化的解释能力好于DNN,但过拟合程度大于DNN。两者的训练集平均绝对偏差和测试集平均绝对误差均在误差范围内,因此认为这2个模型均可作为叶绿素含量估测的模型。

表2 实测值和预测值的平均绝对误差Table 2 Average relative error and average absolute error between observed value and predicted value

图6 CNN和DNN预测值和实测值曲线Fig.6 Curve of CNN and DNN between predicted value and observed value
3 讨论和结论
作物叶片叶绿素的合成需要大量氮素作为物质基础,施氮量会直接影响作物叶片叶绿素含量[13-14]。叶绿素作为植物光合作用的核心部分,所吸收的太阳辐射是光合作用色素含量的函数,相关系数达0.689[15]。
遥感可见光影像作为遥感数据的重要组成部分,包含大量信息。直接提取遥感图像的R、G、B值为参数建立模型,会存在光线变化,阴影及其他环境的影响,对模型的建立存在干扰,模型效果较差。因此,本文为保证信息的准确性,将14个图像特征参数作为输入参数输入模型中,最优时平均相对误差达0.8019,效果优于直接提取R、G、B值为参数建立的模型。这与前人对杂草和土壤背景分析结果一致[16-17]。
传统的浅层网络模型操作简单,对于多维数据的处理能力底下,对数据的特征学习能力弱,需要大量的训练才可达到较好效果。而DNN是一种具备至少一个隐层的神经网络,通过增加网络的隐藏层层数,为模型提供了更高的抽象层次,从而提高网络对数据特征的学习能力。CNN在此基础进行优化,使用卷积层自动提取数据的特征,更改神经元连接方式,使用局部连接及权值共享减少训练参数数量,提高模型对数据的分析和对特征的学习能力。本文采用DNN和CNN作为模型的网络结构,训练400次后得到了较好效果。
本研究中,CNN模型和DNN模型完成400次训练后,DNN的样本集预测值和农学实测值训练集的平均绝对误差在0.80~0.92之间,测试集在8.7~8.9之间。而CNN的预测值和农学实测值的训练集的平均绝对误差在1~2之间,预测集在5.8~6.6之间。CNN模型训练集和预测集的平均绝对误差更为接近,证明在处理多维度数据时,CNN拥有更好的收敛能力,相同训练次数预测结果更准确。对模型进行测试时,部分结果和预测值偏差较大,可能由于数据量较小,模型无法处理全部情况,或模型建立有一定结构问题,存在可修改部分,尚需进行模型优化。
综上所述,以无人机搭载可见光相机获取花生不同时期可见光光谱图像为基础,运用CNN和DNN网络模型,建立无人机可见光光谱图像和叶片叶绿素含量的关系模型发现,利用DNN和CNN所建立的花生叶片叶绿素监测模型的预测值和农学实测值的平均绝对误差均在0.80~0.92和1~2之间,均可较好地预测花生叶片的叶绿素含量,为花生氮营养反演提供准确、快速、实时的监测诊断方法。
猜你喜欢
今日农业(2021年19期)2022-01-12
电子产品世界(2021年6期)2021-02-10
阅读(科学探秘)(2020年8期)2020-11-06
中国现代医生(2020年2期)2020-04-09
绿色科技(2019年2期)2019-05-21
课堂内外·创新作文小学版(2017年5期)2017-06-12
女性天地(2016年10期)2017-04-25
儿童时代·快乐苗苗(2016年4期)2016-11-07
学苑创造·A版(2016年7期)2016-07-06
食品工业科技(2014年6期)2014-05-10
