一种便携式船载水下跟踪测量系统设计∗
2020-10-10 02:44
舰船电子工程 2020年8期
(昆明船舶设备研究试验中心 昆明 650051)
1 引言
近年来,海洋资源的开发力度不断加大,同时也促进了无人智能潜器技术的快速发展,UUV、ROV等水下无人设备的应用范围也越来越广泛,大到海洋监测网络的建设[1],小到水库安全检测都有水下智能无人设备活跃的身影,而水下目标定位跟踪测量系统作为水下无人设备工作保障设备之一,其重要性不言而喻[2]。
水下目标定位跟踪测量系统已有多年的发展历史,主要分为长基线系统、短基线系统和超短基线系统[3]。这些测量系统测量原理基本相同,只是根据测量目标、应用环境以及使用条件的不同,也具有不同的机械结构和功能设计。常见的水下跟踪测量设备专用性较强,主要根据特定用途专门设计,应用拓展较难。且国内外市场上的船载跟踪系统大部分都需要配备相应的安装构件,工作时都有特定要求,通用性不强。
因此,结合水下无人设备的广阔发展前景,考虑降低其使用难度和成本,设计一种体积小、机械结构易于拆卸及安装、便于船载使用的水下目标定位跟踪测量系统是很有必要的。
2 水下跟踪系统测量原理
便携式水下目标定位跟踪系统水平定位采用同步式球面交汇定位原理。深度测量采用脉冲间隔遥测方法,利用双脉冲时延值调制完成水下目标的深度测量。其水平定位球面交汇方程为[4]

式中:(x、y、z)为所求的目标位置,单位:m;(xi、yi、zi)为已知的水听器坐标,单位:m;c为平均声速,单位:m/s;ti为声信号到达各水听器的时间,单位:s。
假设系统基阵采用三元平面阵结构,由三个水听器Sc、Sx、Sy构成平面三角形跟踪基阵,设三角形基阵顶点坐标(x0,y0),基阵孔径对应长度分别为a、b、d(长基线阵的基阵孔径对应长度由水声自校准组件测量得到),见图1。
则有:

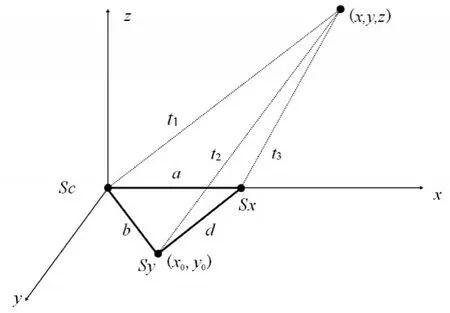
图1 同步式球面交汇定位原理
设目标位置为T(x,y,z),目标传输延时分别为t1、t2、t3,声速为c,已知一顶点坐标(x0,y0),带入式(1),则有:

解方程组,可得:
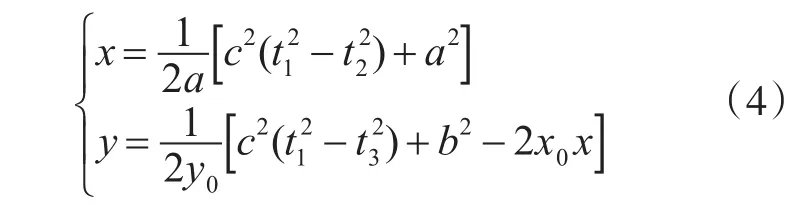
由式(4)便可获得水下目标相对于测量基阵的位置坐标,如果水下基阵与水平面存在一定的夹角,那么还应该根据基阵的姿态进行动态修正,以获得水下目标相对于水平面的位置坐标。
假设基阵坐标系与水平面坐标系原点重合,基阵先绕x轴旋转角β(俯仰角,向下为正),再绕y轴旋转α角(横滚角,向下为正),使基阵坐标系与标准水平面坐标系相重合。此时基阵坐标系和水平面坐标系之间存在如下转换公式:
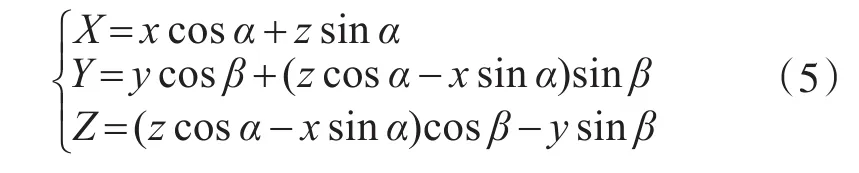
式(5)中的点x、y、z为在基阵坐标系下的点坐标,而X、Y、Z为转换至标准水平面内的点坐标。
如果声传输介质是均匀不变的,那么利用纯数学公式便可直接获得目标深度的精确测量值,但是在实际声环境中,存在声线弯曲等复杂现象,不能精确获得其声传播曲线。虽然采用合适的声线修正方法可以提高测量精度(如等声速法、等梯度法)[5],但是由于测试水域的最大深度一般为100m左右,而且随着季节的变化,声速梯度变化明显[6],深度测量精度提高不大,甚至在某些情况下还会产生明显错误数值。因此在实际工程中,采用双脉冲深度遥测的方法来提高深度测量精度。
在双脉冲信标体制中,利用双脉冲间的时延差为目标深度进行编码。双脉冲间的时延差T的最小值为Tmin,代表目标最小深度Hmin;时延差最大值为Tmax,代表目标最大深度Hmax。目标深度H与之相对应的双脉冲时延差T存在如下公式[7]:

则目标深度H为

3 便携式水下跟踪系统组成及设计
3.1 水下跟踪系统组成
水下目标定位跟踪系统主要由船载湿端设备、船载定位设备、水下信标声源设备等部分组成。其中船载湿端设备包括短基线声学基阵、水密电子舱;船载定位设备包括信号处理设备、定位跟踪数据处理显控设备、双天线航向测量设备、供电设备等;安装在水下目标上的水下声源,主要为定位跟踪系统提供定位信标信号,由信号产生及发射组件和内置电源组成。系统从功能上划分为以下四个分系统:
1)船载声学基阵分系统;
2)船载信号处理分系统,包括GPS同步设备,模拟信号调理设备(前置放大),数字信号处理设备;
3)水下声源分系统;
4)定位跟踪信息处理显控分系统。
在对水下目标进行实时定位跟踪时,系统工作原理如图2所示。
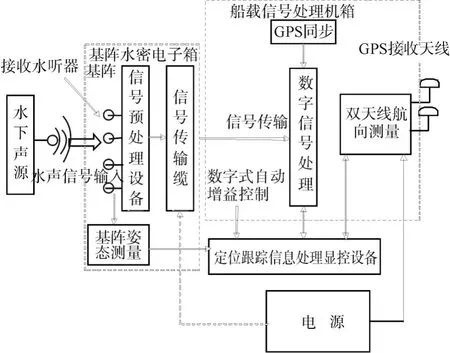
图2 系统工作原理框图
3.2 水下跟踪系统功能设计及实现
3.2.1 工作流程
被测目标上专用水下信标声源发出的声信号经水中传播后,被船载基阵上的水听器接收,经前端放大后,传输至船载信号处理设备。模拟信号调理设备对信号进行放大、调理、控制等一系列处理后,送数字信号处理设备进行信号处理分析。数字信号处理设备完成水声脉冲信号帧行识别,求得脉冲传播时延,再对信号中目标深度信息进行频率编码和脉冲间隔解调,得到深度调制时延及频率等信息[8],并将脉冲信息传送至目标定位跟踪显控设备。目标定位跟踪显控设备进行脉冲信号的匹配、分组、定位解算及声线修正等一系列算法,结合双天线航向测量设备,完成对水下被测目标的三维定位跟踪功能。
3.2.2 功能实现方式
为了实现高精度远距离水下目标的定位跟踪测量,系统的功能实现方式描述如下。
1)采用针对高精度、远距离水下目标定位跟踪测量的信标体制,由于项目只需要考虑定位,且采用同步的定位方式,所以采用双脉冲定位信标体制;采用频分制的方式实现双目标跟踪,信标中心频率为两组;
2)系统采用船载式短基线水声同步跟踪定位方式,基阵水听器输出信号经前放电路放大处理后通过电缆传输至船上信号处理设备进行处理,根据方案设计,系统将研制孔径为2m的正交十字短基线基阵,完成水声信号的接收;
3)研制信号处理设备:包括模拟信号调理(前置放大)、数字信号处理等设备,模拟信号处理设备完成信号的前置放大等功能,数字信号处理设备完成定位信号的数字滤波、检测、参数估计,信号处理设备预留足够带宽(中心频率f±5kHz),可满足目标高速运动时的信号处理要求[9];
4)本系统简化了信号处理的流程,将利用数字滤波器代替以往项目中常用的模拟通道滤波器,具有较好的滤波效果及更为灵活的使用方式,上位机通过网络总线将数字滤波器参数(如:中心频率、通带范围、滤波器阶数、带内纹波系数等)发送给DSP,DSP实时修改FPGA内部组建的数字滤波器,完成其数字信号滤波[10];
5)设计定位跟踪显控处理设备,完成水下目标轨迹的解算处理,在基阵精确校准及信号时延精确估计的基础上[11],定位跟踪显控软件通过采用声线修正技术进一步减小定位误差;
6)研制水下声源设备:为满足系统同步式定位目的,研制安装于水下目标上且自带电池供电的水下声源设备。
4 水下跟踪系统机械结构设计
4.1 测量基阵设计
基阵结构分系统主要由基阵架体、水密筒和连接杆等组成,如图3所示。四个换能器构成一个十字正交的短基线阵形,换能器基线长度为2m,且四个换能器处于同一平面。水密筒组件主要用来安装信号预处理设备、基阵姿态测量设备等电子组件及信号输入、输出缆。水密筒组件固定在基阵架体的基座上。连接杆组件主要用来将船载基阵固定连接到测量船上。
船载基阵接收被测目标上专用水下信标声源发出的声信号,经前端放大后,再传输至船载信号处理设备进行后续处理,并由显控系统输出。
基阵设备主要参数为
1)船载基阵最大工作水深为50m;
2)基阵架体和水密筒在空气中的总重量不大于30kg;
3)基阵结构为十字架形,基阵工作直径为2m。
基阵架组件主要由基阵平台、拆装式悬臂机构、换能器保护罩、换能器升降调整机构和吊放连接机构等组成。基阵架体结构为水平十字形架体,换能器基线长度为2m。为了便于基阵架体运输和安装,该基阵架体设计成组合式架体,换能器安装在换能器悬臂机构上,换能器悬臂机构可整体单独拆开存放。为确保4个换能器的水平精度,换能器悬臂机构上设计了微调机构来控制换能器高度方向的调节。使用时,经定位销限位,将换能器悬臂机构安装到基阵平台的安装平面上,用螺钉可靠固定,即完成了整个基阵架组件的基本装配。且经拆装后,基阵架组件仍能满足系统的使用精度[12]。
为减轻架体整体重量,并保证基阵在水下工作刚度,基阵平台和吊放连接机构采用不锈钢板材料,其余机构采用铝合金材料。
4.2 水密桶设计
水密筒组件主要由上盖、筒体、下盖、安装板、屏蔽盒等组成。如图4所示。
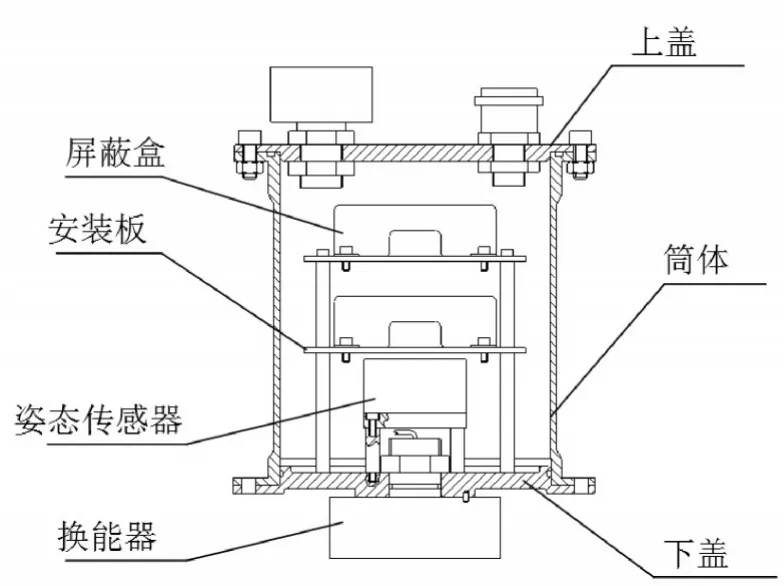
图4 水密桶结构示意图
为减轻重量,水密筒选用了铝合金材料,并对其表面进行阳极氧化处理。并根据实际使用情况,上、下盖与筒体连接处分别设计了端面密封和径向密封形式,既保证了水密筒的水密性,又方便操作。下盖的安装孔、姿态传感器X、Y轴方向与基阵架上四个换能器安装方向都是对应的。姿态传感器、前置放大器、基阵校准声源等水下电子组件都安装在下盖上,方便装配及维修。船载基阵信号输入缆接入筒内,再将处理好的信号通过主缆传输到船舱内处理设备及显控设备上。
5 试验验证
系统信号处理机箱、短基线阵及水密筒实物如图5、图6所示。系统完成装配调试后,在岸边进行基本功能检验,检验正常后在试验测量船上进行固定安装,完成电缆与定位跟踪系统设备的连线。
图5 信号处理机箱
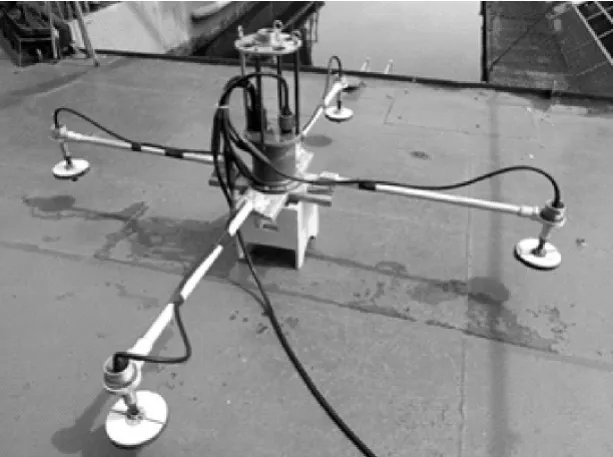
图6 短基线基阵及水密筒
试验测量船携短基线基阵航行至试验水域深水区处停泊进行试验。将调试好的水下声源安放在目标模拟船上,在船上放置GPS设备,GPS设备天线尽量放置于声源附近,以减小定位误差。将短基线基阵降至水下5m左右,开启短基线基阵垂直上方的GPS设备。联接好电缆、信号处理设备、主机,系统上电,进行试验。
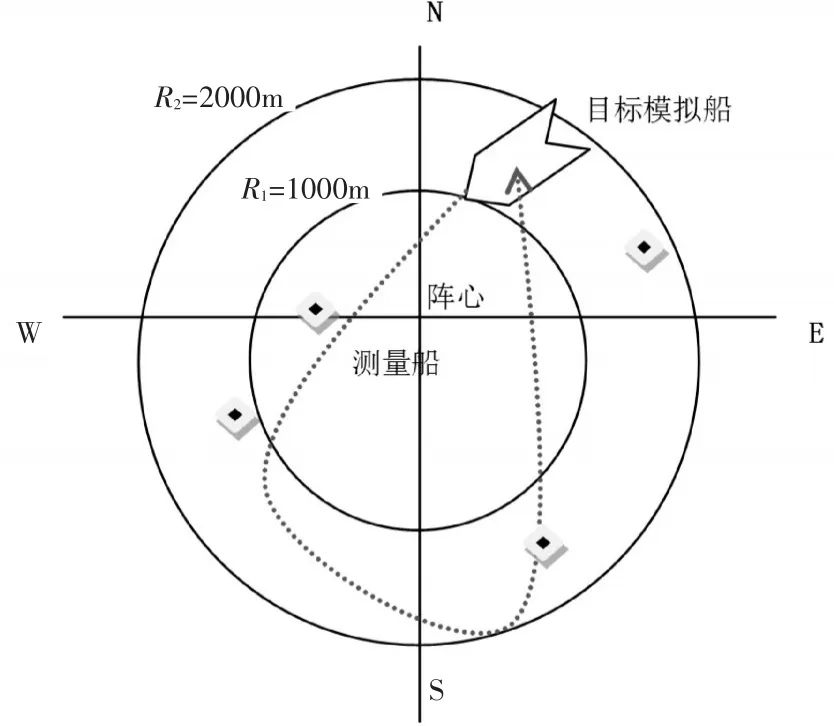
图7 定点位置与动态跑船轨迹示意图
目标模拟船携带水下声源在距测量阵心不小于2km范围内定点漂浮与定速航行,定点位置与动态跑船轨迹如图7所示。水下声源发射的声信号由声学基阵接收,经放大滤波后,由信号接收处理机实时进行时延解算,得到目标航行轨迹与模拟声源调制的深度参数。
6 结语
本文简要介绍了便携式船载水下目标定位跟踪系统的设计内容,通过合理可靠的机械结构设计,使得该系统易于拆卸及安装。结合模块化的硬件设计,整个测量系统可以很方便地安装在多种试验船只上进行使用。试验结果说明该系统满足水下目标定位跟踪测量的要求,具有较高的实用性和可靠性。
猜你喜欢
电声技术(2022年7期)2022-09-23
导航定位学报(2022年4期)2022-08-16
测绘地理信息(2022年3期)2022-06-05
包装工程(2022年9期)2022-05-13
导航定位学报(2021年5期)2021-10-13
理论与创新(2020年14期)2020-09-22
物理(2009年3期)2009-05-21
物理(2009年3期)2009-05-21