基于平面阵的潜艇回波亮点结构仿真研究∗
2020-10-10 02:44潘明邓伟
舰船电子工程 2020年8期
潘 明 邓 伟
(1.海装驻上海地区第九军事代表室 上海 201206)(2.91388部队94分队 湛江 524022)
1 引言
潜艇、深潜器、鱼雷、水雷等目标都有较为复杂的外形结构,国内外很多学者对它们的目标特性进行了较为深入的研究。国内上海交通大学范军教授在前人研究的基础上提出了板块元建模方法。该方法采用成熟的3D建模软件对潜艇、深潜器、鱼雷、水雷等水下目标进行几何建模,然后用精细的网格把表面划分为板块元,计算每个板块的散射函数,再积分得到整个目标的散射函数。该方法建立的模型可以计算潜艇、深潜器、鱼雷、水雷等复杂目标的目标强度,预报瞬态或稳态回波波形。该方法计算精度比较高,计算速度比直接数值积分法快很多倍。因此在水下复杂外形结构的目标强度计算方面得到了较为广泛的应用。
鱼雷是一种常见的水中兵器,作为主战武器被世界各国海军所装备,主要用于打击敌方的大中型水面舰艇和潜艇,其雷身形状为圆柱形,头部为半圆形,以减少鱼雷的航行阻力。鱼雷尺寸分大、中、小三种,其中以533mm直径、324mm直径最为常见。鱼雷武器发射方式多样化,既可以从水面舰艇、潜艇上发射,也可以从飞机上发射。鱼雷按照制导方式可以分为自控鱼雷、自导鱼雷、线导鱼雷和复合制导鱼雷。其中自导鱼雷,就是通过自身的声自导系统获取目标的回波信息,解算出目标的距离、速度、方位、尺度大小等参数,然后选择最优方式对目标进行攻击。靶场海上试验中主要采用潜艇靶标模拟潜艇回波特性验证考核鱼雷攻击水下潜艇的性能,而鱼雷自导基阵一般采用平面阵布阵,因此研究潜艇平面阵回波声亮点结构具有很重要的应用价值,对实际工程应用及水下靶标等效性评估方面有着重要的指导意义。
2 潜艇平面阵回波亮点结构研究方法
鱼雷自导基阵是鱼雷声自导系统的重要组成部分,安装在鱼雷头部,主要根据鱼雷雷头的外形进行布阵。从世界各国装备的鱼雷武器来看,自导基阵主要有平面阵与圆柱面阵两种布阵形式。由于圆柱面阵制作工艺较为复杂,自噪声影响也较大,因此在鱼雷自导基阵中应用较少,大多数鱼雷自导基阵采用平面阵布局方式。因此本文只研究潜艇平面阵下回波声亮点结构,图1是常见的六种鱼雷自导平面基阵配置图。
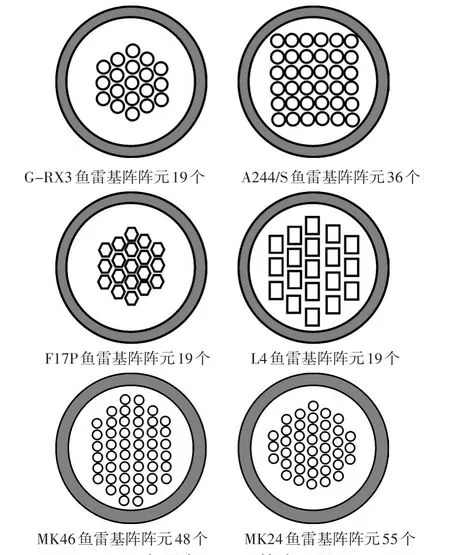
图1 鱼雷自导平面基阵配置图
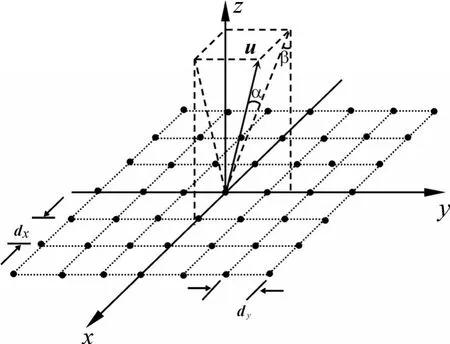
图2 平面接收阵列坐标示意图
图2是平面接收阵列坐标示意图,整个平面阵由M×N个换能器组成,x轴方向上的阵元间距为dx,y轴方向上阵元间距为dy,α、β分别表示波束u沿x轴方向上的俯仰角和沿y轴方向上的水平偏角。所有基元位于z=0平面上,它们的坐标为

波束方向向量u的表达式为
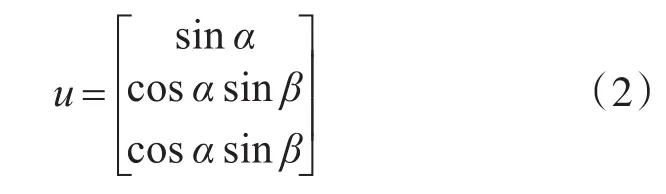
图2平面阵在频率上形成的时域波束可以表示为

其中,第(m,n)号换能器信号从时间上可以表示为Sm,n(t),波束方向的单位矢量用u表示,t时刻能量强度用 b(t,u)表示,旁瓣能量的大小由ωm,n进行控制,τ(u,m,n)表示时延参数,在近距离情况下,由于目标距离各个换能器的距离存在差异,且这种差异是不能忽略的,因此各个换能器形成的波束u存在时间上的差别。ux表示波束u在x轴上的坐标值,uy表示波束u在y轴方向上的坐标值,第(m,n)号换能器的坐标可以写成(xm,yn),则时延参数τ(u,m,n)表达式为

其中,c表示声波在水中的传播速度,b(t,u)是空间变量α、β和时间t的函数,从中可以提取出目标的三维信息。
3 潜艇平面阵回波亮点结构仿真
鱼雷自导基阵采用直线阵时,鱼雷只能在单平面内搜索发现目标,由于波束在垂直方向上的能量相同,因此是无法有效区分垂直方向的攻击目标的。为在垂直面内能够测定目标的俯仰角,同时提高分辨多目标的能力,鱼雷自导基阵必须采用平面阵,且在垂直层面的阵列波束越多,对目标的分辨能力越强。目前平面阵已广泛应用于超声成像、鱼雷自导等领域。
图3所示是Benchmark潜艇模型复杂目标与平面阵位置关系。图4所示为平面阵所形成波束照射潜艇目标视图。采用半波长布阵的40×40平面阵接收目标回波信号。声源位于平面阵的中心,中心频率为f0=30kHz,采样频率为fs=120kHz,目标以45°倾斜方位角朝向平面阵,对40×40平面阵接收到的目标回波信号做波束形成运算。得到Benchmark潜艇平面阵回波亮点结构如图5所示。
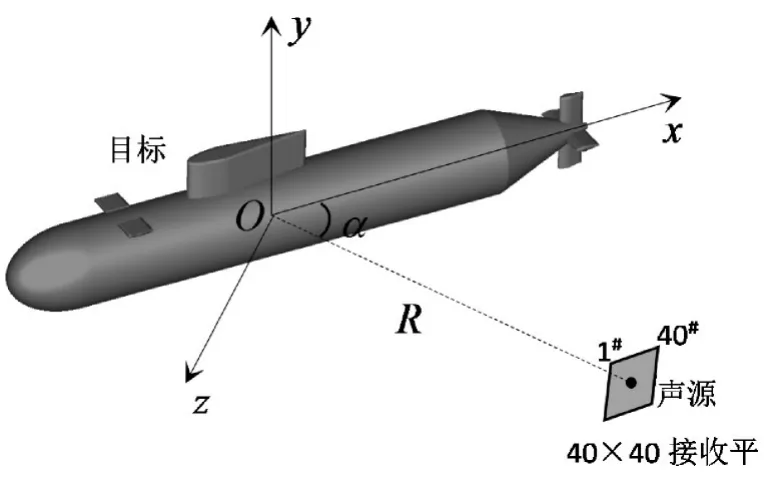
图3 平面阵与Benchmark潜艇目标位置关系
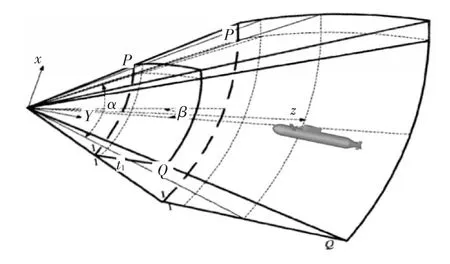
图4 平面阵所形成波束照射潜艇目标视图
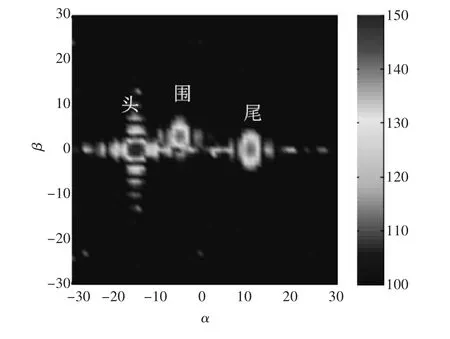
图5 平面阵获取的Benchmark潜艇回波声图像
由图5平面阵获取的Benchmark潜艇回波声图像成像中,可以明显地看出有3个亮点,具体对应的位置是Benchmark潜艇模型的头部、围壳和尾部。其中头部、尾部亮点在同一水平面内,而围壳有一定的俯仰角,而且头部亮点和围壳亮点在位置上相距更近,这与实际的目标模型结构是相匹配的。
4 潜艇回波信号分析
尺度特征是潜艇目标回波的重要特征,主要表现为三个方面:目标回波的时间展宽,目标回波的亮点起伏,目标回波空间方位分布。这三个方面对水下目标的尺度识别非常重要。下面主要从不同观察角内观察Benchmark潜艇回波之间的差异性。
仿真距离设置300m,信号形式为CW、LFM,信号脉宽模拟鱼雷近程信号取10ms,以Benchmark潜艇为研究对象,获得潜艇回波仿真预报结果如图6、7、8所示。
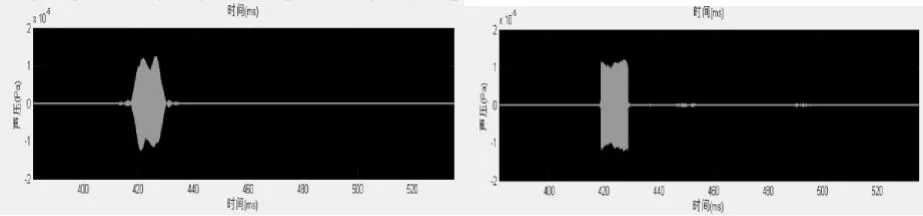
图6 60°观察角下潜艇回波仿真预报
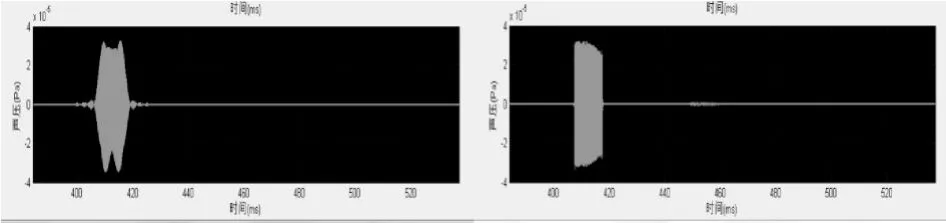
图7 90°观察角下潜艇回波仿真预报

图8 120°观察角下潜艇回波仿真预报
5 结语
本文研究了平面阵下Benchmark潜艇的回波特性,得到了Benchmark潜艇回波声亮点图像,从中可以发现Benchmark潜艇的回波亮点图像与目标模型的结构是匹配的;对不同观察角下Benchmark潜艇回波信号进行了仿真预报,发现在有些观察角度下获得的潜艇回波结构差异性很明显,尤其是120°观察角下,这对于实际工程应用及水下靶标等效性评估中有着一定的指导意义。潜艇属于机动作战平台,基本处于运动状态,因此下一步将重点研究运动状态下潜艇回波强度的影响因素以及与静止状态下的回波特性的差异性分析。
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
小哥白尼(军事科学)(2022年1期)2022-04-26
舰船电子对抗(2021年2期)2021-06-16
少儿科技(2021年4期)2021-01-11
移动通信(2020年9期)2020-11-06
现代电子技术(2020年3期)2020-08-04
兵器知识(2020年2期)2020-03-20
文萃报·周二版(2019年46期)2019-09-10
军事文摘·科学少年(2018年6期)2018-09-06
军事文摘(2016年8期)2016-08-11