三自由度水下摄像照明系统设计
2020-09-29 06:40朱春丽1丰1
石油矿场机械 2020年5期
朱春丽1,贾 鹏,尹 丰1,房 丽,王 刚
(1.中海油研究总院有限责任公司,北京 100028; 2.哈尔滨工程大学 机电工程学院,哈尔滨 150001)
随着国家战略的支持和各大石油公司以及高校研究所的深入研究,浅海区域的油气开采规模不断扩大。目前,浅海区域的油气开采技术已经基本成熟,短时间内仍然是海洋资源主要的发展方向。随着浅水油气开采力度的加大,浅水油气资源也在不断消耗。所以,各大石油公司对于深水油气资源的开发也在同时进行[1-2]。作为目前深海油气田开发的主流形式,水下生产系统得到了广泛应用。油气开采的水深不断加大,离岸距离也逐渐增加,水下生产系统面临的问题也越来越多,例如,海底环境的洋流和暗流引起的冲刷、海洋生物引起的腐蚀和污损[3-4]等因素都会对水下生产系统产生破坏。所以,对水下生产系统进行实时监测,保障水下生产系统正常、稳定的工作是十分必要的。
孙传东等人针对水下电视的保护罩结构设计和摄像镜头组的分布进行了试验研究,结果表明,玻璃半球可以替代普通平镜玻璃作为防水密封玻璃,有效改善了由于水介质折射引起的图像畸变问题[5]。沈凌敏等人通过计算水下30~40 m微光条件下目标物与成像系统的光照度需求,设计出使用1台摄像机搭配4台照明灯工作的方案,并通过试验分析了照明灯后向散射对于成像质量的影响,从而得出了不可将照明灯与摄像机安装在同一位置的结论[6]。张利等人通过推导图像的衬度和信噪比传递函数,得知在成像距离不变条件下增大光源角度,可使图像的衬度和信噪比增大,并利用试验证明光源角度配置对图像质量的影响,与理论分析一致[7]。本文基于闭路成像技术视频成像技术、设计了一种用于对水下生产系统进行视频监测的水下照明摄像系统,采用水下照明灯为目标物提供足够的照度,配合摄像机进行工作,从而获得高清晰度的视频图像,实现对水下生产系统360°全视角的视频监测,具备多角度、全方位定点监测以及巡航监测等功能。
1 系统结构组成
三自由度水下摄像照明系统组成如图 1所示。综合显示平台使用TCP/IP视频协议和Modbus控制协议与三自由度水下摄像照明系统进行通信。硬盘录像机与水上光纤路由器连接,通过综合显示平台集成的控制界面对硬盘录像机和摄像机进行工作模式的设置,摄像机的焦距和光圈的调整,实时回放录像文件。通过水上光纤路由器和水下光纤路由器对三自由度水下摄像照明系统进行供电,实现设备的控制和状态信息的反馈。
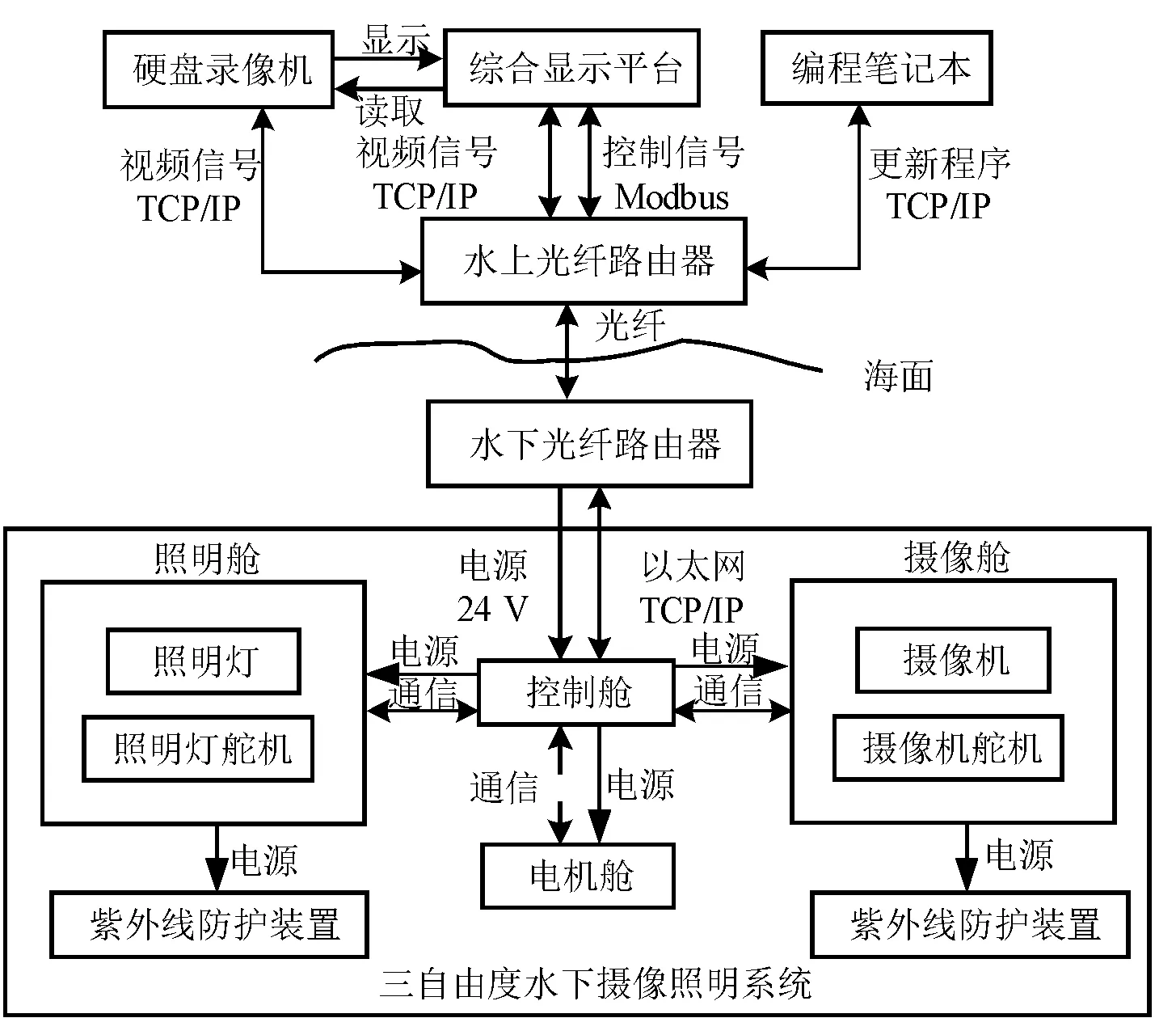
图1 三自由度水下摄像照明系统框图
三自由度水下摄像照明系统主要包括基座、支架、水下成像系统、紫外线防护装置、控制舱和电机舱,如图2。

图2 三自由度水下照明系统
支架用于承载水下成像系统、紫外线防护装置、控制舱和电机舱;基座与支架共同组成系统的对接锁紧装置,使得支架及其承载的设备在必要时可回收至岸边,进行零部件的更换和维修;摄像舱和照明舱通过连接轴连接成一体,共同组成水下成像系统,利用电机舱为水下成像系统提供水平方向的同步旋转,水下成像系统舱内的舵机提供摄像机和照明灯竖直方向的俯仰运动;使用压力补偿器对电机舱进行正压力补偿;照明灯为目标物处提供足够照度,配合摄像机捕捉图像,并通过光纤路由器将实时图像上传至综合显示平台;采用紫外线防护装置从摄像舱和照明舱的外部进行照射,对摄像舱和照明舱的密封玻璃罩进行海洋生物污损防护。
2 水下成像系统结构设计
水下成像系统由摄像舱、照明舱和连接轴组成,如图 3所示。照明舱基本结构如图 4所示,由舱体、玻璃罩、照明灯、舵机和照明灯支架等组成,舱体为照明灯提供密封的安装空间,照明灯支架用于承载照明灯和舵机,舵机为照明灯提供竖直方向的俯仰运动,摄像舱和照明舱结构类似,主要用于密封摄像机、舵机。
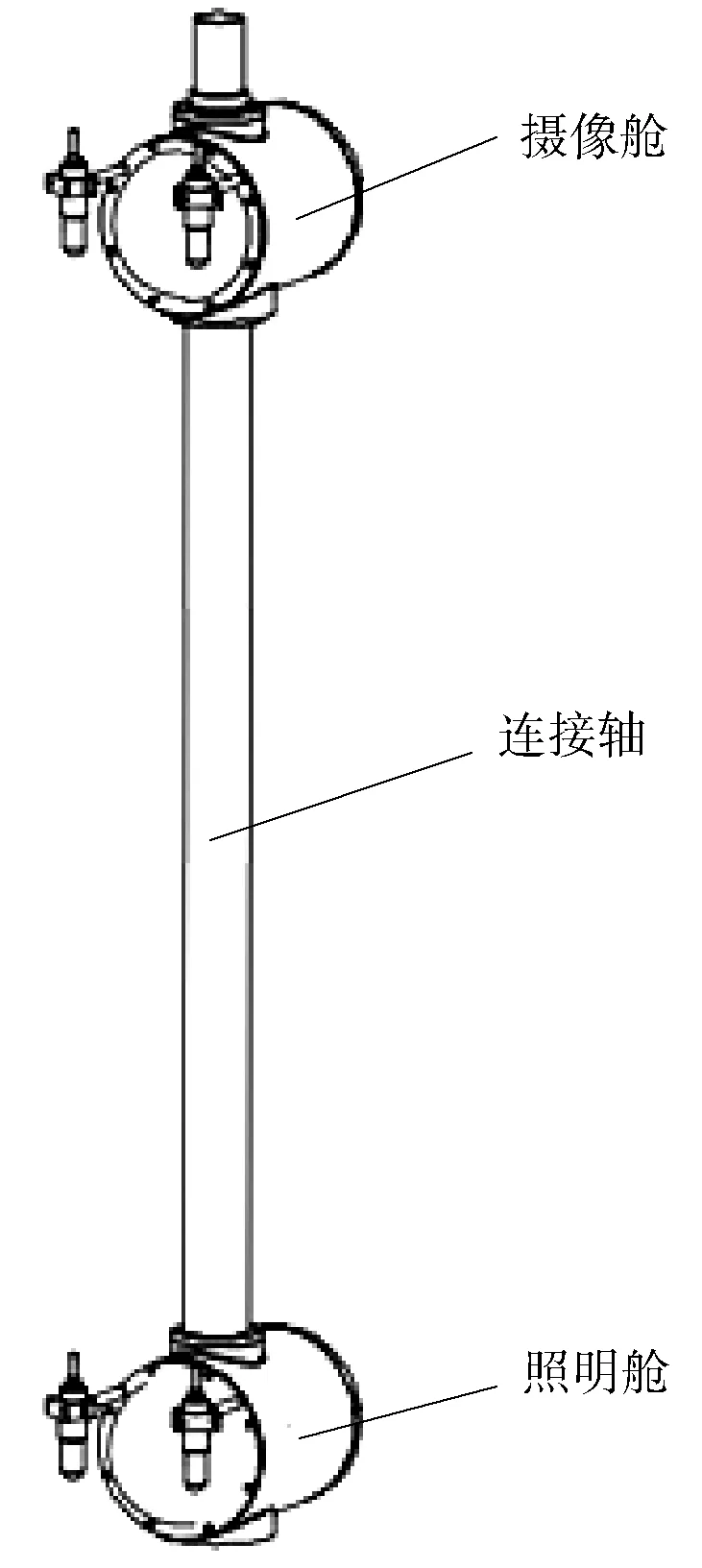
图3 水下成像系统

图4 照明舱基本结构
2.1 水下成像系统位置部署
在目标物照度满足要求的条件下,水下环境视频成像效果主要受海水中光散射的影响。若水下照明灯与摄像机安装在一起,水下灯光会将摄像机正前方的悬浮粒子照亮,反射的光线进入摄像机的接收器内。此外,照明灯照亮的区域与摄像机视角重叠的部分较大,也会导致后向散射现象,降低图像对比度,使得图像细节模糊[8]。本系统使用的连接轴长度为1.5 m,将水下灯光与摄像机分开放置,使后向反射对成像质量的影响较小[9]。
2.2 摄像机相关参数计算
摄像机是水下摄像系统最为关键的一部分,水下摄像机的变焦能力和视场范围直接决定了该系统能否实现360°全方位监测。视场范围与摄像机镜头焦距直接相关,选择合适焦距的摄像机对于摄取景物十分重要。最低照度主要体现在摄像机对目标物照度的感知能力上,直接影响摄像机能否在低照度环境下捕捉到有效的图像。
2.2.1 相对孔径
相对孔径与像面照度之间的关系为:
(1)
式中:B为未衰减的光照度;D/f为相对孔径;T为水路径衰减系数;nω为水的折射率。
同一片海域、同一水深条件下,未衰减的光照度B、水路径衰减系数T、水的折射率nω相同,像面照度与相对孔径D/f成正比,因此,提高摄像机的相对孔径有利于提高像面照度[10]。
2.2.2 视场角与焦距计算
摄像机所需的视场角为:
2ω=2arctan(H/2L)
(2)
式中:2ω为视场角;H为目标物高度;L为目标物与摄像系统距离。
摄像机所需的最小焦距为:
(3)
式中:f为镜头焦距;η为接收器件对角线长度。
摄像机与目标物拍摄的简化模型如图 5所示,被监测的水下生产设施高约5 m,摄像机距离设备底部的高度为2.4 m,即H1=2.6 m,H2=2.4 m,实际观测地点的水质透明度约为16.5 m,因此监测距离取16.5 m。将H1=2.6 m,L=16.5 m带入式(2),可得摄像机所需的最大视场角2ω为17.1°。经对比,选择海康威视品牌的一体化摄像机芯,视场范围最大角度为58.9°,在广角模式下可以观看水下生产系统全貌。长焦模式下,摄像机视场角仅有3.5°,无法观看水下生产系统的全部细节,所以使用舵机提供摄像机竖直方向的俯仰运动,增加摄像机长焦模式下的观察范围;该款摄像机接收器件尺寸为9.1 mm,接收器件对角线长度为5.71 mm,水的折射率取1.33,代入式(3)可以得到摄像机观察被监测的水下生产设施全貌需要的焦距为14.25 mm,该款摄像机焦距为4.3~129 mm,符合要求。
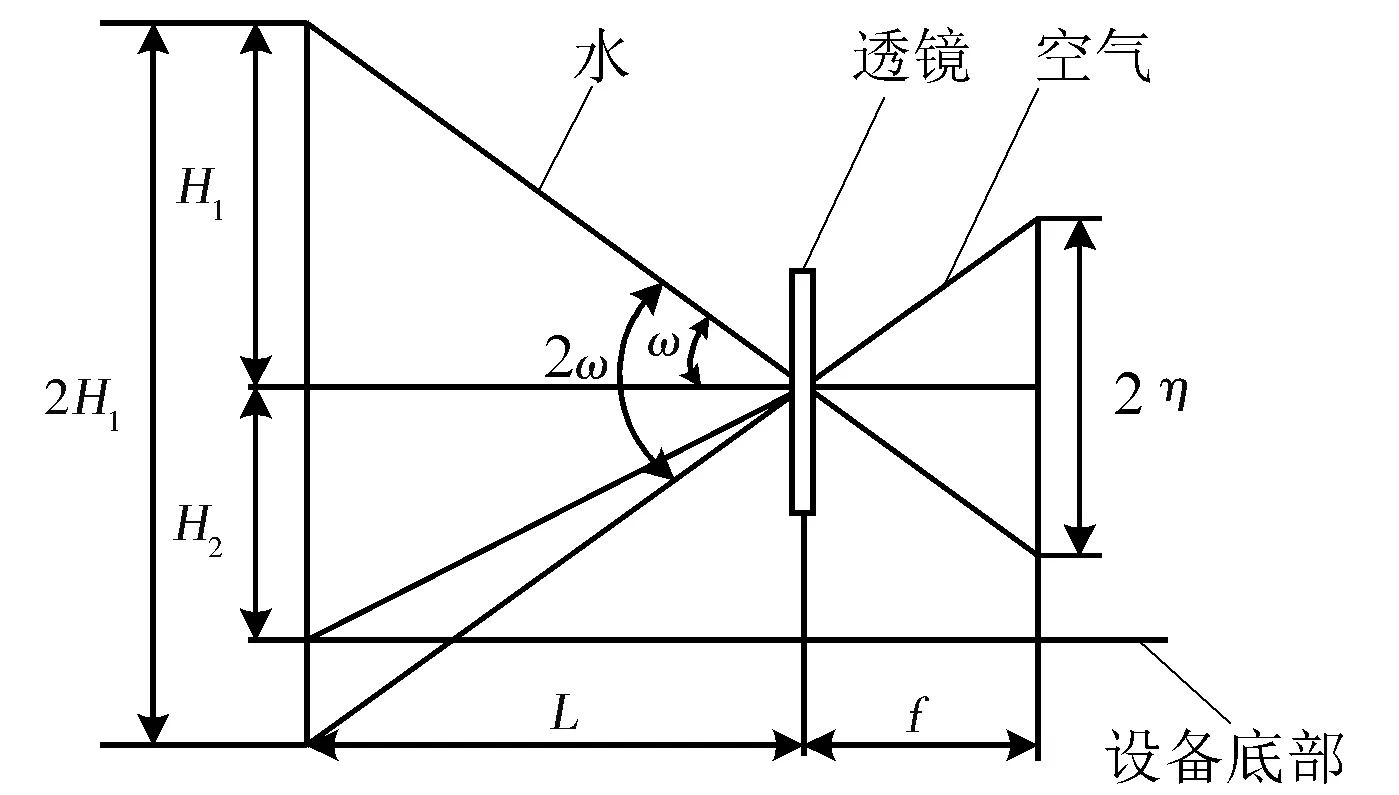
图5 摄像机与目标物拍摄模型简化
2.3 水下照明灯
由于海水悬浮粒子的存在和纯水本身的散射作用,海水对光不仅存在着吸收作用,还存在着很严重的散射和反射作用。研究表明,光在海水中传播的能量呈指数规律迅速衰减[9]。吸收和散射作用的存在使目标物处的照度明显不足,造成了图像衬度明显变差,导致摄像机监测画面不清晰。所以,在水下成像系统内增加辅助光源来保证目标物处的照度是十分必要的。LED灯具有光束集中,使用寿命长,结构紧凑等优点,所以选择LED灯作为该系统的辅助光源。在保证目标物处照度满足要求的前提下,辅助光源亮度应该尽可能小,否则多余的光线会叠加在目标物上,降低图像的对比度。本系统选择可以通过RS485协议调整光通量的LED灯。
2.4 玻璃罩材质选择
本系统紫外线杀菌灯从舱外照射玻璃罩,减少了紫外线穿过玻璃罩造成的能量损失,且玻璃罩材料本身无需具有透过275 nm紫外线波段的性能,最终选择透光率可以达到95%以上的硼硅酸盐作为玻璃罩的材质,玻璃罩与舱体之间采用粘结方式连接成一体。
3 电机舱设计
电机舱为水下成像系统提供水平方向为±180°范围的旋转,主要由电机、编码器、谐波减速器以及压力补偿器组成。电机舱内部充满绝缘硅油,外接压力补偿器对舱内进行压力补偿。
3.1 电机类型选择
本系统处于1 500 m水深的海洋环境,电机舱承受压力为15 MPa,采用绝缘硅油对舱内进行压力补偿。
压力补偿器主要有3种功用[11]:
1) 保持系统内外压力平衡,可以使保护罩按照薄壁件进行设计,大幅减小系统的几何尺寸和质量。
2) 使静态系统更加容易密封。
3) 防止海水渗透。
无刷电机采用电子换向,相对于有刷电机使用碳刷换向来说,不会产生碳刷使硅油变质从而导致硅油绝缘性能降低的情况[12],所以电机类型选择无框无刷电机。经过计算,选择科尔摩根品牌的无框电机,额定转矩为0.413 N·m,额定转速为4 500 r/min,搭配减速比为1∶160的谐波减速器,电机舱分为低速工作状态和高速除尘状态,定期以电机最大转速工作,为水下成像系统除尘。
3.2 电机舱补偿体积计算
压力补偿器的补偿工作容积可以按下式求出[13]:
VB=[VY(βpJ+aΔt+KX)+ΔVL+ΔVG]/(1-C)
(4)
式中:VY为被补偿系统液体体积;β为相对体积压缩系数;pJ为为静水压力;α为体积膨胀温度系数,对于油α=5.8×10-4~9.5×10-4;Δt为温差;ΔVL为48 h内液体系统的泄漏;ΔVG为系统工作时所需补偿的体积;KX为气液系数,取3%~6%;C为补偿体积变化系数。
相对体积压缩系数β可由式(5)计算:
(5)
式中:a、b为经验常数,对于矿物油,a=6.13×104,b=1.115×10-6。
补偿体积变化系数C可由式(6)计算:
(6)
式中:∑ΔV为系统中被补偿的工作液体的体积。
系统中被补偿的工作液体的体积∑ΔV可由式(7)计算:
∑ΔV=βVYpJ+aΔt·VY+ΔVQ(W)+ΔVL+ΔVG
(7)
式中:ΔVQ(W)为随温度变化而产生的气体体积变化量,m3。
该系统中电机舱承受的静水压力为15 MPa,系统应用区域南海海面与海洋1 500 m深处的温度差约为25 ℃[14]。该系统为静态压力补偿系统且假设电机舱48 h无泄漏,被补偿系统液体体积为0.77 L。计算得出电机舱需要的补偿体积为0.05 L,取安全系数为5,则补偿器容积为0.25 L。
4 紫外线防护装置
海洋生物在设备上短时间内附着时,尚未形成成熟的生物膜体系,容易被海水冲刷掉。随着时间推移,生物膜与海洋细菌通过共价键等作用建立有机联系[15],海洋细菌不再轻易掉落。附着时间继续延长,海洋细菌在设备表面形成动态附着,微生物膜在海水冲刷下脱落的同时也有不同种类的海洋生物继续附着[16]。此时,海洋生物对于设备表面的材料也不断腐蚀,同时还会遮挡摄像机和照明灯的镜头,影响设备捕捉图像的能力。所以,必须在开始附着的短时间内使用防污手段避免生物膜的继续成熟。本系统中采取紫外线照射的方式,但设备脱离紫外线照射后,海洋生物依然会继续附着,所以采用若干组紫外线杀菌灯循环持续照射照明舱和摄像舱的玻璃罩。紫外线作用距离有限,所以将紫外线防护装置放置于舱外,减少了紫外线在传递过程中的能量损失。紫外线防护装置如图6所示。
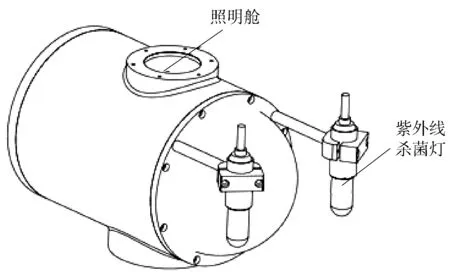
图6 紫外线防护装置
5 控制系统设计
水下摄像照明系统的控制部分主要包括电机、驱动器、编码器、PLC的CPU模块和RS485模块以及I/O模块等。系统由综合显示平台的上位机页面向放置于水下的设备发出指令,通过光纤路由器向控制舱集中供电、进行控制信号以及视频信号的传输。控制舱则通过水密插头向各舱分配信号,根据上位机发出的信号指令进行相应动作,接受运动状态反馈信息。
6 结论
1) 三自由度水下摄像照明系统通过连接轴结构将摄像机和照明灯分开放置,降低了照明灯和摄像机光线重叠造成的后向散射作用对图像的影响。
2) 使用电机舱和舵机为照明舱和摄像舱提供同步水平旋转运动和垂直方向的俯仰运动,减少了摄像照明系统的自由度,消除传统设备照明灯和摄像机水平方向上的旋转误差。
3) 使用压力补偿器对电机舱进行正压力补偿,保护了舱内元器件,使得整体设备可以在多种水深条件下工作。
4) 紫外线杀菌灯从外侧照射的方式减小了紫外线通过玻璃罩造成的能量损失,延长了紫外线的有效作用距离,并且光学玻璃的材质无需受紫外线性能限制,可使三自由度水下摄像照明系统在水下进行长期监测。
猜你喜欢
中国交通信息化(2022年1期)2022-04-19
汽车维护与修理(2021年3期)2021-08-12
辽东学院学报(自然科学版)(2021年1期)2021-03-12
应用心理学(2019年4期)2019-12-05
青少年科技博览(中学版)(2017年6期)2018-03-20
军事文摘·科学少年(2016年11期)2017-02-09
祝你幸福·知心(2008年11期)2008-10-24