
自动化钻机向智能化发展的关键技术分析
2020-09-29 06:40:34景佐军智庆杰唐飞秦羿涵王辉寻明冉洋范
石油矿场机械 2020年5期
景佐军智庆杰唐 飞秦羿涵王 辉寻 明冉 洋范 磊
(1.宝鸡石油机械有限责任公司,陕西 宝鸡 721002;2.国家油气钻井装备工程技术研究中心,陕西 宝鸡 721002)
近年来,伴随着科学技术的发展,石油钻机历经了柴油机驱动机械式钻机、SCR直流电驱动钻机、VFD交流变频电驱动钻机等发展阶段。目前,石油钻机已经进入到了自动化钻机阶段,即,在绞车、泥浆泵等关键设备采用变频驱动的基础上,配置输送、拆接、排放用的全套管柱自动化装备[1-2],并通过司钻控制系统实现钻机各个设备的集中自动化操作,以及相应的逻辑保护功能。国外石油钻机已经初步进入到智能化初期阶段,在现有自动化钻机方面又有了诸多新的技术提升。本文从我国自动化钻机当前状态、存在的技术瓶颈问题、后续智能化发展亟需攻克的关键技术等方面进行阐述。
1 我国自动化钻机相关技术发展现状
1.1 自动化钻机级别涵盖较为齐全
近年来,伴随着中国石油集团公司油气勘探开发作业提出的“四化”(注:四化为“标准化、专业化、机械化、信息化”)和“五省”(注:五省为“省人、省心、省力、省时、省钱”)目标的大力推进,国内在自动化钻机研制方面也取得了长足进步,实现了从无到有、从单台到批量、从3 000 m到9 000 m的全级别覆盖。
该系列钻机配置了地面堆场、钻台面、二层台全流程的管柱自动化作业设备,全机械化装备辅助自动控制程序使得人工作业强度大幅降低;采用顶驱与转盘变频驱动共用切换技术,实现了顶驱电控房与钻机电控房的集成,进一步减少了设备搬运车次;主驱动设备的全面直驱化,降低了设备外形尺寸以及整体质量。该批次钻机截止目前已由中石油宝鸡石油机械有限责任公司完成了数十台的生产制造,并在国内陆上各主要油气勘探区块进行作业,历时近2 a的现场作业,累计实现近百口井的作业,为一线生产作业提供了有力支撑和保障。我国研制的2款自动化钻机产品如图1~2所示。
1.2 自动化排管技术初获成功
伴随着油气勘探开发提质增效需求,国内各石油装备研发制造企业也都纷纷投入大量精力进行自动化排管系统的研究攻关[3-7],也形成了诸多各具特色的单元装备,为钻机自动化技术发展提供保证。宝鸡石油机械有限责任公司(以下简称宝石机械)研制的DM型动力猫道如图3所示,可实现3根钻杆集中输送,大幅提升管具在地面与钻台间输送效率。北京捷杰西公司研制的JJC型铁钻工如图4所示,采用连续链式旋扣钳,有效降低对钻具的损伤。三一集团研制的电动化二层台排管装置如图5所示,可实现二层台无人化作业。

图1 大庆钻探7 000 m自动化钻机

图2 渤海钻探8 000 m四单根自动化钻机

图3 宝石机械研制的动力猫道
图4 捷杰西JJC型铁钻工

图5 三一集团研制的二层台机械手
1.3 司钻集成控制技术已经突破
以宝石机械idriller系统(如图6所示)为代表的国产化司钻集成控制系统已经实现技术突破,并在国内已经实现批量化应用。以前,此类技术均为国外少数标杆企业所垄断,包括美国NOV公司的Cyberbase产品、挪威AkerSolutions公司的Drive view产品等。国产化的集成司钻系统在功能上基本具备了国外同类产品的使用性能,包括智能防碰、逻辑互锁、数据记录、互备冗余等,并通过在国内数十套钻机中进行应用验证,有效提升作业安全性以及操作人员舒适性。
1.4 钻机远程信息化监测技术路径打通
随着物联网技术在各行各业中的迅速推进,石油钻机的远程信息化监测也已经实现技术验证[8]。石油钻机的作业多处于人迹稀少、交通不便的区域,但又由于该装备中电气自动化、液压传动等专业性,通过4G或卫星传输手段实现关键设备的实时运行状态监测,以及后端专家的专业技术指导,已成为未来钻机技术发展的必然趋势。

a 宝石机械idriller集成司钻效果图

b 宝石机械idriller集成司钻产品图
中国石油集团公司在十三五期间启动了石油装备物联网(C10)工程项目,目前已经实现了钻机、柴油机组等重大装备的数据归档回传,各装备制造企业在该统一数据平台下也纷纷建立远程监测终端平台,有力提升了装备的信息化水平。宝石机械建立了“钻机远程服务中心”,如图7所示,初步具备了运行状态监测、预测维护提醒、报警信息提示、故障排查指导、设备档案归档、音视频协同等功能;并支持不同用户采取在各自终端对所管理钻机的实时监测查看,如图8所示。
2 自动化钻机技术发展过程中面临的技术瓶颈
我国批量自动化钻机历经工业化应用,作业流程能够满足现场作业工艺需求,各设备功能均得到验证。但是,仍然存在相关问题,这也成为发展智能钻机的技术瓶颈。

图7 宝石机械“钻机远程服务中心”

图8 宝石机械某钻机监测界面信息
2.1 系统作业效率问题
当前自动化钻机的整体布局和作业流程与传统作业模式相比并无本质的变化,总体思想还是在原来需要人工干预的环节通过增加液动机械臂或专用机构来代替人员,并无流程的缩减和本质革新,个别环节动作较人工还更加繁琐。新增多个自动化设备(如图9~10所示,包括:钻台机械手、铁钻工、泥浆盒、缓冲机械手、动力卡瓦等),使得钻台面布局紧张。由于设备防撞保护,使得并行作业环节减少。机构在面对不同规格钻具,以及交接位置偏差,总的响应灵活性与人体有着不可逾越的差距,在一定程度限制了自动化钻机效率的提升。因此,自动化钻机在短时作业过程中的效率优势不明显。在长时作业过程,由于机构动作的可重复性和人工体力的下降,自动化钻机的优势明显。
以地面输送单根入井口为例,自动化钻机动作流程为:
钻杆由排管架滚入猫道V型槽→猫道举升钻杆上钻台→猫道推移钻杆伸出至井口→吊卡扣合钻杆→游车上提钻杆→缓冲机械手扶持钻杆底部→游车下放钻杆至井口。
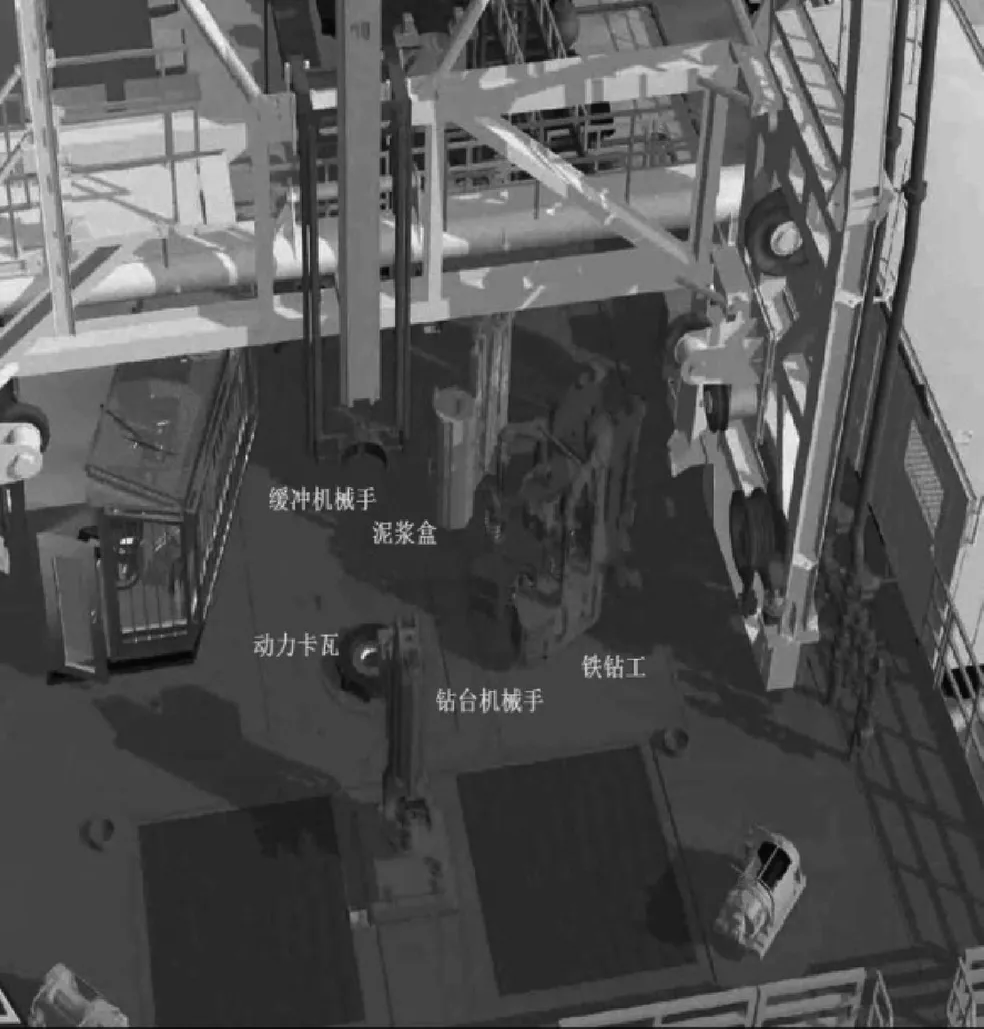
图9 自动化钻机钻台布局

图10 自动化钻机钻台交接钻杆过程
常规人工作业流程为:
人工旋锥帽到钻杆→风动绞车提升钻杆至井口→人工扶钻杆入井口。
由于人工作业过程中无需吊卡扣合参与,且钻杆在上钻台过程中边提升边翻转,这是目前自动化钻机所不具备的。
2.2 自动化工具稳定性及作业成功率问题
当前,以动力猫道、铁钻工等为代表的管柱自动化设备大幅降低了作业过程中的人员劳动强度,深受一线作业工人的欢迎,但目前各企业研制的上述设备或多或少存在着长时稳定性的问题。由于其多采用液压驱动系统,其受温度以及油品清洁度的影响非常大。随着外部气候的变化以及环境的恶劣,上述设备在猫道自动拾取钻杆、铁钻工一次上/卸扣、吊卡有效扣合、缓冲机械手准确导向扶持对中、钻台机械手重复精确排管定位等方面都存在着无法有效保障成功率的问题,各相关设备也无自动调整结构以适应微小位置偏差;加之丝扣油涂抹以及拆卸护帽等工作仍需人员手动实现,使得管柱输送、排放等作业过程仍无法实现全流程自动化。
2.3 个别状态检测手段尚不成熟问题
限于检测对象(钻具)规格/长度的多样性,以及钻杆输送过程柔性环节,使得铁钻工、钻台机械手等设备有效检测管具精确位置和状态成为瓶颈(如图11所示)。另外,安装于顶驱下部的吊卡存在360°以上的旋转工况,在吊卡本体进行扣合、载荷、倾斜角度等电信号直接检测方式存在传输困难;尤其是管柱输送及排放作业过程中需要人工参与部分协助工作(如图12所示),由于缺少人员位置精确检测,存在设备伤人的安全隐患,在人机协同作业方面尚不成熟。

图11 铁钻工识别钻杆高度

图12 人工协助钻杆导向入鼠洞
2.4 各类数据零散并缺少系统分析整理问题
据相关资料介绍,钻井成本占油气勘探开发总成本的50%以上,提高钻井速度可以极大节省整体作业成本。基于大数据分析的钻井过程优化成为将来的大势所趋[9-11]。作为勘探开发的核心装备,石油钻机向智能化发展也离不开大数据的分析。通过对历史井位的地质数据、勘探开发工艺数据、设备状态数据等数以百万计数据的综合分析,可以实现钻井工程设计优化、钻机作业参数优化、地下井筒风险识别、钻后时效评估等功能,钻机则可更加高效地按照工艺需求和地质特性,在最优的钻压/转速等参数下工作。目前,国内上述不同类别的数据信息还都隶属于不同的部门或环节,尚未形成统一的数据平台,缺少数据的分析整理机制,对于大数据的深度挖掘和应用都造成一定瓶颈。
2.5 井下智能工具及近钻头数据检测传输问题
未来智能钻井的发展必然是井下、地面一体化,即,以旋转导向等为代表的井下智能化工具,实现井眼轨迹的自动分析判断、调整处理、修正执行,从而实现超深井、高难度定向井、水平井、丛式井、多分支井等复杂井开发的井筒轨迹控制。同时,通过井下仪器检测技术,高效地实现近钻头处的钻压、泥浆等特性参数实时采集,借助于智能钻杆等高速数据传输介质,将井底真实的状态数据反馈给地面[12],从而使钻机控制系统结合上述信息,实现悬重、泵冲的自动优化调整,进而完成地面钻机与井下参数的大闭环控制。目前,世界上较为成熟的旋转导向工具包括贝克休斯公司的AUTO TRAK RCLS系统、斯伦贝谢的POWER DRIVER SRD系统、SPERRY-SUN公司的GEO-PILOT系统等。上述工具在现场应用中已为钻探用户取得了良好的经济效益。中国石油勘探开发研究院、西安石油大学、胜利油田钻井工艺研究院等相关科研院所也先后在此方面进行了研究攻关,并有相关产品产出进入到应用阶段。但是,目前在市场认可度等方面相对国外产品仍有一定差距。
3 国内钻机智能化发展建议
3.1 全新流程方式的钻机总体技术开发
如前面所述,我国相关企业已经完成了以管柱自动化装备为核心配置的自动化钻机研发制造。上述钻机采用的是模拟常规钻机人工作业动作流程进行机械化替代的技术路径,这也是自动化钻机发展的必然阶段。通过应用,反映出了单元设备过多造成钻杆交接复杂、钻台有效作业空间压缩、并行作业工序减少、设备重复精度以及可靠性不高、系统作业效率有待进一步提升等问题。为此,国外相关企业已经从作业流程着手,进行了颠覆性原始技术创新,并取得了良好效果。建议智能化钻机首先需要解决作业流程革新问题。
由West Group公司研制的连续运动钻机(CMR)采用了连续不间断循环钻井系统、液缸直推式无绞车提升系统、双提升机械手系统、独立立根系统等全新设计理念,使得钻机性能得到大幅提升,如图13所示。该钻机连续不间断循环钻井系统可避免接单根时停泵卡钻风险,减少窄压力窗口地层起下钻柱时引起的井筒溢流和井漏,解决遭遇复杂井况时对井筒安全挑战等系列问题。同时,通过2套提升系统和多个操作手臂之间配合,进行起下钻作业或完成各种钻井作业,相对于常规钻机的单提升作业模式,作业中途无任何间断停留。2套提升系统交替起下钻作业,可使起下钻速度达到3 600 m/h,效率是目前人工的数倍,钻井周期节约50%以上,钻井成本节约40%~45%,减少动力系统二氧化碳排放量60%。

图13 CMR钻机双提升机械手系统
3.2 电动化钻井机器人装备开发
以电动伺服驱动为代表的机器人自动化装备具有传动精准、响应灵敏、易于维护等优点,尤其是其电动化系统设备状态参数便于提取监测,更容易实现智能化过程的信息监测。智能钻机的可靠发展必须以此高精准性的电动化执行机构作为支撑。该形式钻机机器人具有强大的自主学习、自主决策分析等功能,不仅独立完成工作,还能根据作业过程微小偏差进行自我调整[13]。同时,充分进行设备的集成设计,减少参与过程的单元设备数量,进而减少由于多设备参与井口作业、相互避让导致的关联设备等待时间(泥浆防喷、丝扣油涂抹等尽量与铁钻工一体化集成设计,减少各个单元散件独立机构进出井口的无效时间),挪威RDS等公司已经进行了钻井机器人的研发应用(如图14),并取得阶段性成果;国内石油装备制造商应该加强与机器人行业的联合,开发出满足石油钻机的防爆型大负载钻井机器人。

图14 RDS公司系列钻井机器人
3.3 跨学科引进图像识别等技术开发
检测系统作为智能化钻机的自主决策的信息来源和判别依据,非常关键,如前面所述部分环节依赖于传统传感器进行检测的方式已经无法实现。但是,其他行业内依靠图像识别、人脸识别等新兴技术进行特征状态提取,其技术已经日益成熟。国外NOV等公司也已经通过图像识别技术进行铁钻工上/卸扣过程中钻杆接箍高度的识别,从而实现铁钻工钳头的自主升降来适应作业高度 ,检测准确率已达98 %,取得了较好的效果[14],如图15所示。
同时,依据图像识别技术对人机并行作业的钻台区域进行人员动态站位实时检测,解决了人机协同过程中的安全性问题。

图15 NOV图像识别在铁钻工中应用
3.4 基于大数据的智能钻井专家系统建设
未来智能化钻井系统将以远端智能钻井专家系统为决策核心[15]。该系统应用大数据、人工智能、机器深度学习等算法,结合钻机作业现场返回的地质、工艺、装备综合数据,进行系统优化分析,从而为勘探开发现场提供最优钻具组合、泥浆参数、钻机工作参数等信息,提高钻机的系统作业时效。另外,通过大数据分析比对,可对井漏、溢流、钻具刺漏、断钻具、溜钻、卡钻等地质事故和工程事故进行提前预警,从而提醒司钻人员采取相应的预防措施。国外的斯伦贝谢公司依托其多年来勘探开发服务过程中积累的全球海量钻井数据,建立了其智能钻井专家平台——“DELFI”[16]。该平台集地球物理学、地质学、油藏工程学、钻井工艺学、采油工艺学等多专业知识为一体,可为钻井工程项目进行井眼轨迹设计、套管等钻具组合设计、钻井液设计和固井设计等提供一体化最优解决方案。该平台具有自主辅助决策功能,还会根据作业井位不断丰富其数据库信息,进一步自主学习,充实其优化的准确度。我国缺少统一的上述后台大数据分析平台,大量钻井数据未进行数字化归档提取。然而,国内各个装备制造企业与钻探业务的专业化分工,其往往不掌握上述数据信息,故该系统亟需由钻井工艺部门联合专业公司进行开发,从而支撑智能化钻井技术的开展。
3.5 井下工具及数据传输技术攻关
井下智能工具作为钻井作业的“车前灯”和“方向盘”,是智能化钻井系统的关键组成部分。目前,限于基础材料等瓶颈,国内与国外同行标杆企业具有一定的技术差距。建议国内加大进行高温、高压、耐腐蚀电子检测元件的开发,同时进行智能钻杆等井下高速率通讯技术的攻关,为智能化钻井的系统完整性提供保障。
4 结论
1) 介绍了我国自动化钻机相关技术发展现状。分析了自动化钻机总体技术、自动化排管技术、司钻集成控制技术、钻机远程信息化监测技术的应用情况和效果。
2) 结合实际应用情况,提出了国内自动化钻机在系统作业效率、自动化工具稳定性及作业成功率、个别状态检测手段瓶颈、数据零散并缺少系统分析、井下智能工具及近钻头数据检测传输等方面存在的问题。
3) 结合智能化钻井作业需求,提出钻机自动化技术向智能化方向发展,需要进行全新流程方式的钻机总体技术开发、电动化钻井机器人装备开发;引进图像识别等技术,解决检测技术问题。同时在大数据的智能钻井专家系统建设、井下工具及数据传输技术等方面加大研究力度。
猜你喜欢
机械工程师(2024年3期)2024-03-25 09:20:16
冶金设备(2021年2期)2021-07-21 08:44:22
铁道建筑技术(2021年4期)2021-07-21 05:33:36
安徽地质(2019年2期)2019-10-30 08:11:28
制造技术与机床(2019年8期)2019-09-03 01:14:28
机械制造与自动化(2018年6期)2019-01-08 08:17:22
凿岩机械气动工具(2016年1期)2016-11-11 07:33:37
设备管理与维修(2016年7期)2016-04-23 06:51:39
大型铸锻件(2015年4期)2016-01-12 06:35:13
凿岩机械气动工具(2015年3期)2015-11-11 07:32:54
