地面静电加速度计的位移检测电路设计
2020-09-09 00:34贺晓霞郑峥嵘韩丰田刘云峰
导航与控制 2020年3期
贺晓霞,郑峥嵘,韩丰田,刘云峰,张 嵘
(清华大学精密仪器系导航技术工程中心,北京100084)
0 引言
静电悬浮加速度计(Electrostatically Suspended Accelerometer,ESA)是一种利用静电力实现检验质量多自由度支承、利用力平衡原理实现加速度测量的高精度惯性仪表,可作为海空重力测量仪器的核心传感器。它的基本工作原理为:敏感质量被静电悬浮于其闭环零位处,当受到外界加速度作用时,敏感质量产生位移,通过位移检测系统测出敏感质量位移引起的微电容变化,并通过反馈电压产生的静电力平衡敏感质量上的惯性力,使敏感质量稳定在零位位置,反馈电压的幅值和极性即反映了输入加速度的变化。其显著特点为量程小、灵敏度高、噪声低,在地球重力场测量[1]、 物理学基础理论验证[2]、 卫星拖曳[3]等空间领域有着广泛的应用。法国的ONERA从20世纪70年代起陆续研制了CACTUS、ASTRE和GRADIO等系列加速度计,用于大气阻力实验、无阻力飞行试验和空间准稳态非重力的测量等[4];美国研制的MESA加速度计进行了敏感探头从圆筒型到立方体的改进,应用到重力卫星及多种航天器上[5];欧洲航天局在空间引力波探测计划中针对小于1Hz超低带宽的应用场景,采用两只静电加速度计进行验证[6];中国空间研究院兰州物理研究所针对微重力测量,研制了静电悬浮加速度计样机,并通过高压悬浮进行地面实验验证[7];华中科技大学物理系对悬丝悬挂法、高电压悬浮法、自由落体法三种地面测试方法进行了比较[8]。这些静电加速度计都是针对微重力环境进行设计,目前尚未有针对地面应用的静电悬浮加速度计的研究报道。相比于空间应用,地面应用的静电悬浮加速度计需要更高带宽、更大量程,即需要高的悬浮电压,这会引入较大的电路噪声,从而限制了仪表的测量精度。
在位移检测方面,常用的方法包括二极管检测[9]、 调频式检 测[10]、 电桥 差分检 测[11]、 变压 器检测[12]等。二极管检测法信噪比高,解调方便且功耗低,但无法屏蔽引线的对地寄生电容;调频式检测法抗电磁干扰能力强,易于数字化,但不适合有高压反馈的检测场合;电桥差分放大检测法结构简单,能够屏蔽引线的对地寄生电容,但在抑制共模误差方面不如变压器检测法;变压器检测法具有抗干扰能力强、灵敏度高的特点,是空间静电加速度计最成熟的解决方案。基于高带宽、大量程的需求,对变压器检测电路进行改良,是解决静电加速度计地面应用的关键。
本文面向静电悬浮加速度计的地面应用需求,采用一种中心固定有一薄法兰盘的空心薄壁圆筒敏感质量、圆筒内外侧与法兰盘两侧布置检测和加力电极的方案。该结构具有较大的表面积质量比,能够减小起支电压、预载与控制电压,从而减小由高压加力电路引入的噪声,预期能在不超过350V的支承电压下满足预期过载。本文以此种大表面积质量比的敏感探头结构为测量对象,设计了基于差动电容的位移检测系统,建立了电容检测电路的数学模型,对系统各部分电路参数进行了设计、仿真并对电路误差来源进行了分析,对电路的噪声、线性度、灵敏度及对高压隔离的效果进行了实验。
1 大表面积质量比的敏感探头结构
敏感探头结构及电极分布如图1所示,包括敏感质量、上/下电极幄、圆筒内/外电极,其平面电极板、圆柱内外电极板的定义如图2所示。

图1 敏感质量结构及其电极分布Fig.1 Structure of proof mass and its electrode distribution
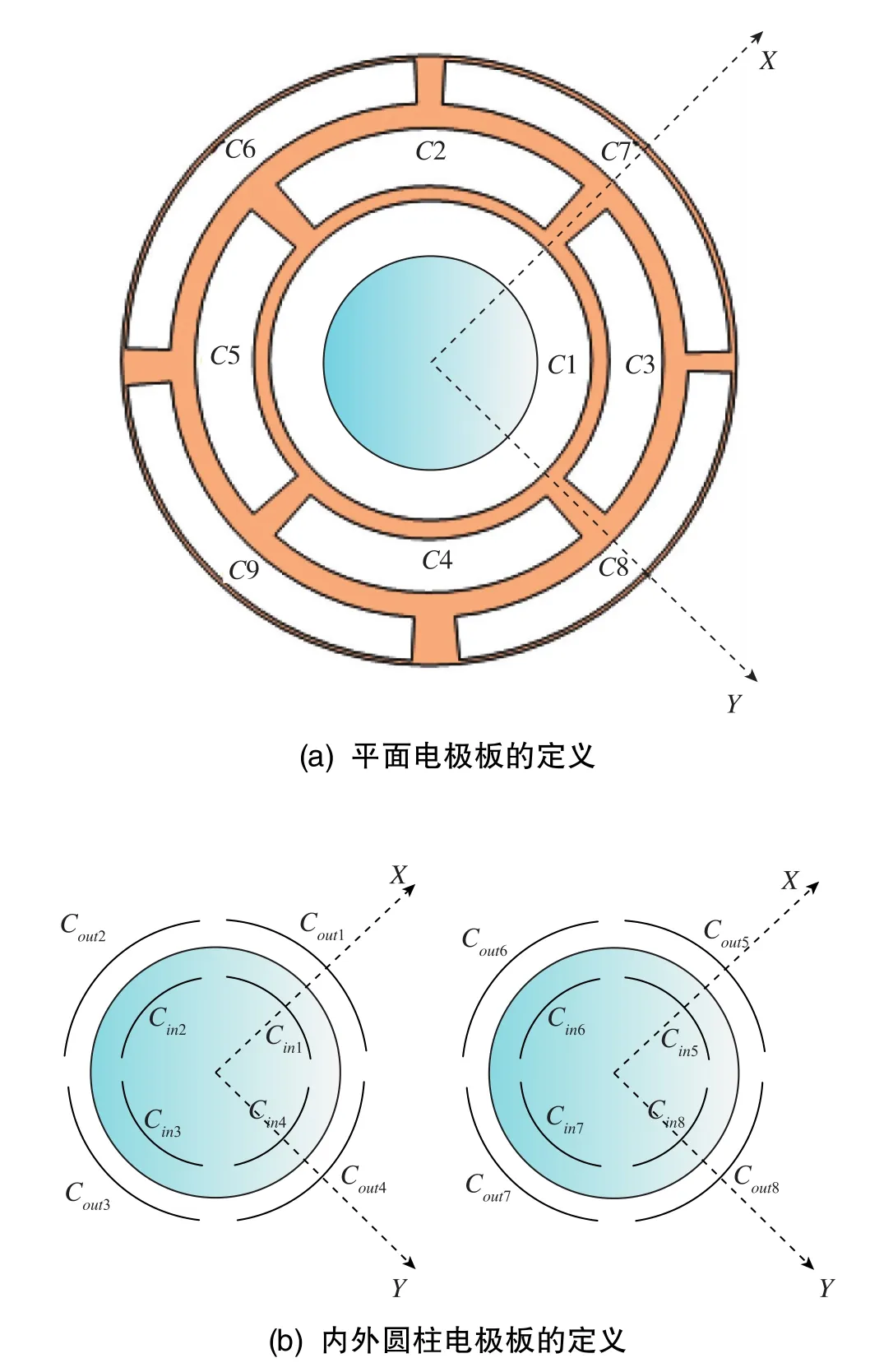
图2 电极板的定义Fig.2 Definition of electrode plate on the plane and cylinder
五个自由度的位移检测及高压加力电极分配如表1所示。其中,圆筒内外电极负责控制敏感探头在X、Y、θ、φ自由度的位移并同时复用为检测信号的注入电极,盘面的中、内环电极负责控制Z轴;在5个自由度的位移和姿态检测方面,外环电极用变面积式位移检测法对X轴、Y轴的位移进行检测,中环电极用变间隙式检测法对θ、φ轴作位移检测,内环电极用变间隙式检测法对Z轴作位移检测。各组电极板面积及电容设计值如表2所示。
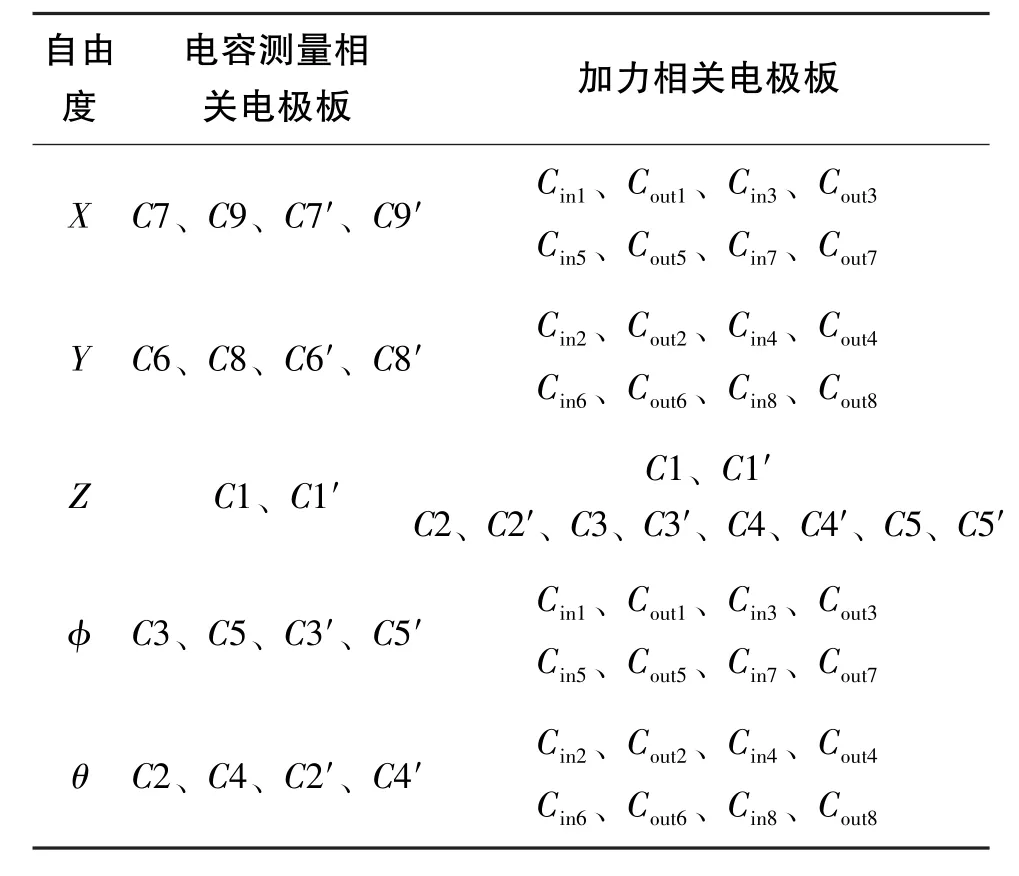
表1 各自由度的电极分配Table 1 Distribution of electrodes for five degrees of freedom

表2 电极面积及电容设计值Table 2 Values of electrode area and electrode capacitance
图3(a)为敏感结构的相关组件,包括敏感探头、中心环、定距环、内电极圆柱、电极幄。其中,敏感探头由铍材料加工而成,盘面直径34mm、壁厚 0.5mm,圆柱直径 14mm、长度22.5mm、壁厚0.4mm,质量1.417g,盘面与电极板间隙30μm,柱面与电极板间隙40μm。图3(b)为装配完成的整体结构,离子泵用于维持腔内真空,有利于降低因板间残余气体导致的噪声和阻尼干扰。
基于此敏感结构的设计,以C1-C1′电极的位移测量为例,下文给出了位移检测电路的设计原理、数学模型、仿真及实验结果。

图3 敏感结构的装配Fig.3 Assembly of proof mass and electrodes
2 位移检测电路的设计
位移检测电路的组成如图4所示,包含了变压器式的电容检测电路、差分放大电路、带通滤波、相敏解调电路及高频载波信号源。
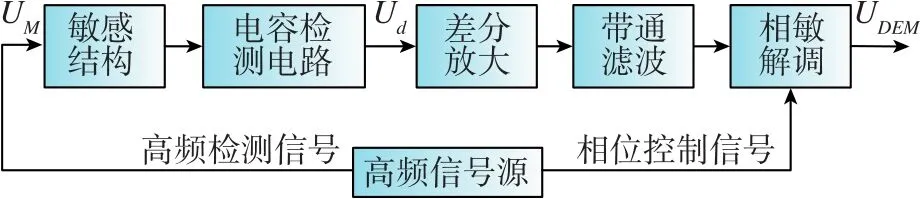
图4 位移检测电路示意图Fig.4 Diagram of displacement detection circuit
设电极C1、C1′与敏感质量的间隙电容分别为C1、C2,差动电容ΔC=C1-C2。当外界输入加速度时,敏感结构发生偏移,ΔC发生变化,并对UM进行调幅,调制后的UM经由变压器式电容检测电路、差分放大电路、带通滤波后再通过相敏解调电路,得到与ΔC呈近似线性关系的位移检测信号UDEM,输出给后续模/数转换电路。 其中,UM为电路中的载波信号,ΔC的变化可认为是调幅信号。
2.1 电容检测电路的数学模型
变压器式电容检测原理如图5所示。L1、L2、L3为变压器的电感,Cp为调谐电容,用于调整电路的谐振频率。通常有Cp≫C1, 以稳定电路增益,屏蔽寄生电容的影响。

图5 变压器式电容检测电路原理图Fig.5 Schematic diagram of transformer-based capacitance detection circuit
不同于空间应用,地面加速度计的带宽更宽、量程更大,因此需对图5所示电路进行优化。为有效隔离高频载波信号与高压反馈信号,减小高压影响,需设计高压隔离网络;由于ΔC引起的信号变化幅度很小,变压器副边应设计高增益、低噪声的信号放大结构。优化后的电容检测电路如图6所示。

图6 实际电容检测电路原理图Fig.6 Schematic diagram of actual transformer-based capacitance detection circuit
Ub1、Ub2为交流高压控制信号,Cf为运算放大器的反馈电容;解耦电容Cd能够将电流信号转化为电压信号,用于后续放大;Ca为隔离电容,用于衰减悬浮高压引起的干扰。高压隔离电路利用电容在不同频率下阻抗的差异实现信号隔离,如高压控制信号频率取1kHz~10kHz、载波信号频率取500kHz~1MHz时,能够将二者有效隔离,避免高压控制信号影响后续检测电路。下面对电路的传递函数和增益进行分析。
假设电流源、电压源、电感、运算放大器均是理想的,考虑UM引起的变压器副边输出。将信号源±Ub做短路处理,根据叠加定理,对于副边电路,有

从而,U3、I3与Ud的关系式可表示为
根据Kirchhoff定律,变压器原边的电流为

式(5)中,

Uo1、Uo2可以表示为
将式(7)代入式(5)中, 得到

式(8)中,

因为Cp远大于C1和C2,从而Zp≈Zp1≈Zp2,α1≈α2。 根据变压器性质,有

式(10)中,n1、n2为变压器原边匝数,n3为变压器副边匝数,M13、M23为变压器的互感系数,其表达式为
式(11)中,L1、L2、L3为变压器的电感值,K13、K23为耦合系数。理想状态下,K13=K23=1,取n1=n2=n3,L1=L2=L3=L,则

将式(4)、 式(8)、 式(13)代入式(12)中, 得到U3与UM的关系式

设载波信号UM的频率为500kHz,Vd为Ud的幅值,VM为UM的幅值。经过带通滤波、调制解调,输出信号Vd与ΔC、VM的关系式可表示为

式(16)中,

Kcu=即为电容检测增益,代表输出电压与电容的灵敏度。由式(16)可知,在理想状态下,输出信号Vd与差动电容ΔC成线性相关。
要保证实际电路趋于理想状况,应注意电路布线应尽量对称以避免寄生电容、变压器三端电感值相等以及Cp远大于C1和C2,以保证Kcu的稳定。
2.2 高压反馈信号的设计
在地面测试中,静电加速度计的反馈电压通常为直流形式[13-14],有利于降低控制电压幅值。但直流放大电路存在零位漂移、噪声大的现象,限制了加速度计的测量精度。而交流控制可实现不同自由度间的分频控制,减小轴间耦合,易于获得低噪声和高零偏稳定性[15]。因此,悬浮控制信号采用交流调幅形式。
为避免高压信号对变压器的损坏,高压信号需要通过隔离电路施加。对隔离电路的要求是尽量小的压降和足够的噪声隔离水平,以期减小其对位移检测电路的影响。
首先,计算施加在电极上的电压值Uo1、Uo2来评估压降。地面应用中,控制信号的频率一般小于10kHz, 由于Ca在皮法(pF)量级,L在毫亨(mH)量级, 有,因此L的分压可忽略不计。仅考虑由高压控制电压产生的Uo1、Uo2, 根据图6的电路,有

由式(18)可知,要使压降小,即Uo1≈Ub,应有sRbCp≪1且Cp应选择为具有耐高压特性的电容。
下面推导Ub对Ud的影响,以评估高压对位移检测电路的影响。根据 Kirchhoff定律,在Uo1、Uo2处,有

将式(7)、 式(9)代入式(19)中, 得到

将式(4)、 式(13)、 式(20)代入式(12)中, 得到

将式(3)代入式(21)中, 最终得到Ud与Ub1、Ub2的关系式
对于电容检测电路的输出Vd,设10kHz控制信号引入的误差为Vd-error,则Vd-error与Ub1、Ub2的关系式为

式(23)中,

Kb(s)称之为高压信号的误差增益。综合式 (16)和式 (23),电容检测电路的输出信号表示为

要减小反馈控制信号对输出的影响,一是后续电路要有足够的滤波能力,二是通过增大电阻Rb来减小,从而降低控制信号引起的误差。但应注意的是,若Rb太大,根据式(18)压降会增大;Rb太小, 则会降低电容检测增益。 因此,Rb取值应根据实际情况折中设置。
3 仿真与实验验证
3.1 电路幅频、相频响应特性的仿真
位移测量电路在零位附近可近似成线性系统,但在离零位较远处,敏感质量的位移与差动电容变化呈现非线性。另外,电路设计不对称、寄生电容等会影响电容检测增益,从而增加其测量非线性。要提高仪器的测量精度,就要提高系统线性度,保证模拟电路的增益稳定。以Z轴的差动电容检测为例,检测电路的相关参数取值如表3所示。

表3 电路相关参数取值Table 3 Values of circuit related parameters
其中,载波信号的频率设为500kHz。若选取的载波频率过低,则隔离网络无法充分衰减低频控制信号并提取高频载波信号;若选取的载波频率过高,则会增大变压器的寄生电容和铁芯磁损,不利于电路的长期稳定。综上考虑,选取载波频率为500kHz。
对于电路谐振频率和载波频率的选择有两种做法:1)选择载波频率远离谐振点,使相位变化平缓,但信号灵敏度和信噪比较差;2)选择载波频率在谐振点附近,这样能获得较理想的灵敏度和信噪比,但相移剧烈。为获得较理想的灵敏度和信噪比,选择载波频率在电路谐振点附近,并通过设置变压器Q值保证相位变化引起的增益变化在可控范围内。根据此原则,设计了表3所示的参数,计算得到电容检测电路的幅频响应特性,在ΔC=20pF时,电容检测电路的幅频和相频响应特性如图7所示。其中,电路谐振频率约为495.8kHz。
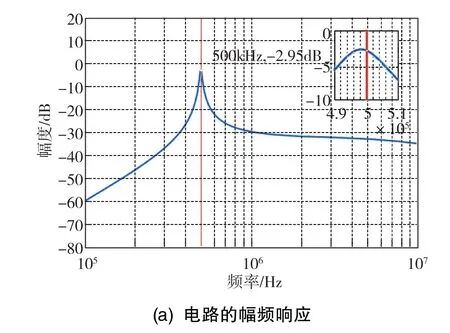
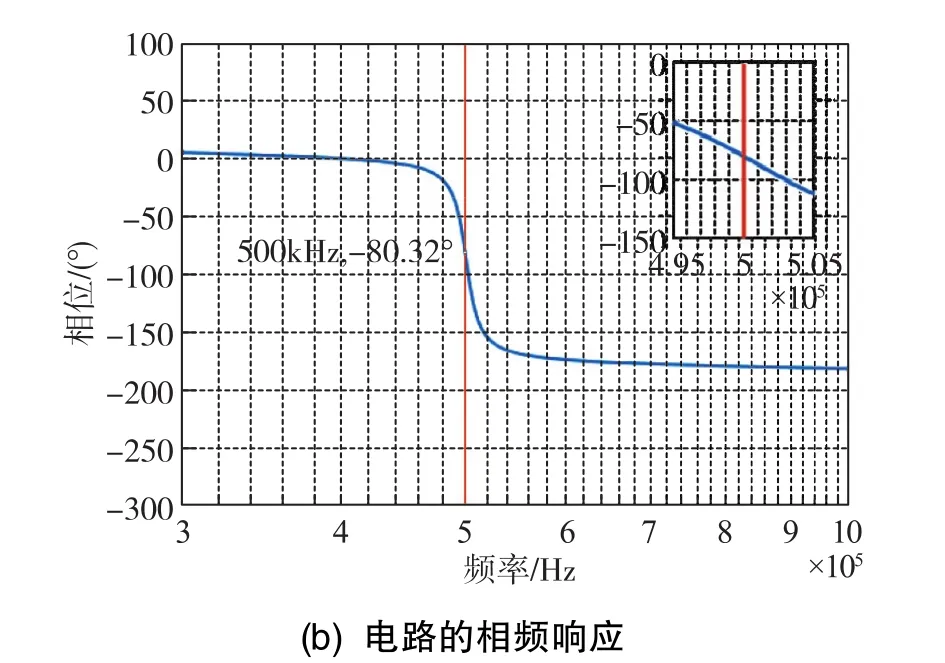
图7 电容检测电路的频率响应Fig.7 Frequency response of capacitance detection circuit
相移最终会影响位移检测电路的增益变化,增益变化对力平衡式加速度计的影响主要体现在动态标度因数和控制系统的稳定性上。原理上,增益变化不影响力平衡式加速度计的零位和静态标度因数。本文设计的加速度计重点关注零位和静态标度因数性能,故相移不超过控制系统的动态性能和稳定性要求所规定的范围即可,即位移测量电路增益在10kHz带宽内变化不应超过20%。表4列出了500kHz±5kHz范围内ΔC改变时电路的相位响应。

表4 电容检测电路相移随差动电容、频率的变化关系Table 4 Relationship between phase shift of capacitance detection circuit and differential capacitance and frequency

式(26)中,λa为差分放大、带通滤波电路的增益。其中,二次谐波经后续低通滤去,不影响解调结果,故带宽内相位变化引起的增益变化最大为1-cosΔφmax=0.132, 即增益波动约为13%,满足加速度计控制系统稳定性要求。
另外,为抑制温漂导致的幅频、相频变化,除了采用差分结构、设置变压器Q值之外,还可采用温度性能优异的电容(如C0G材料[16])、极低零漂运算放大器(如采用AD8629芯片斩波调零)、数字系统线性化控制(如DSP解算[17])及搭建温控系统,这些措施都能够提高增益、相位的稳定性。
3.2 电容检测电路的误差分析
电路的误差主要来源于两部分:一是电路设信号的表达式为[14]计原理上的非线性误差,即Cp≫C0,从而认为Kcu近似为常值——对于力平衡式加速度计,由于检验值始终稳定在零位附近,检测电路的非线性、灵敏度变化等对加速度计的精度影响不大;二是高压反馈信号引入的误差,这需要充分抑制,但由于地面加速度计的悬浮回路带宽较高,载波和悬浮电压之间的频率分离只有2~3个数量级,抑制效果受限。
首先分析原理误差,由式(14)有

代入表3的参数,得到Vd与ΔC的关系,如图8所示。
在ΔC∈(-80pF,80pF)的范围内,输出电压Vd与差动电容ΔC可近似为线性关系。由于加速度计工作在零点位置,即ΔC→0。当ΔC∈(-0.5pF,0.5pF)时,电容检测电路的非线性误差为

图8 输出电压Vd与差动电容ΔC的关系曲线Fig.8 Curves of output voltage Vdand differential capacitance ΔC
其非线性误差小于1×10-6,能够满足系统的精度要求。
下面讨论高压引入的误差,将表3的参数代入式(24)中,可得到高压信号增益Kb

设Ub1、Ub2是频率为10kHz、幅值为350V的正余弦信号,则为700V, 从而Vd-error最大为1.19V。而差分放大电路、带通滤波电路在 10kHz处的幅频响应分别为-123dB、-73dB,能够将Vd-error降低至1.19×10-10V以下,即高压信号引入的误差为10-10量级,可忽略不计。
综上,电容检测电路的误差能够满足加速度计的精度要求。
3.3 电路线性度测试
本文制作的位移检测电路测试板如图9所示,包括了电容检测电路、差分放大电路、带通滤波电路、相敏解调电路。

图9 位移检测电路测试模块Fig.9 Test module of displacement detection circuit
根据式(16),解调电路输出信号VDEM可以表示为

式(30)中,λ为除电容检测电路外其他电路的总增益,理论值λ=3.49。电容检测电路的增益Kcu理论值为0.0178V/pF。
电路线性度决定了加速度计控制的复杂度及加速度计最终输出模型的复杂度,故需对其进行摸底测试。先使用RCL测量仪对可变电容器进行标定,再使用差分可变电容器作为电路的差分电容ΔC进行输入。在室温25℃下,测试结果如表5和图10所示。

表5 差动电容、检测电路增益、输出电压的关系Table 5 Relationship among differential capacitance,detection circuit gain and output voltage

图10 输出电压VDEM与差动电容ΔC的关系曲线Fig.10 Curves of output voltage VDEMand differential capacitance ΔC
由表5可知,在ΔC=0pF时,电路有零偏,这是由电容检测电路的Cp不对称、L1和L2不相等、导线引入的寄生电容等桥路不对称因素造成的,可通过串联调零电容或通过加速度计控制器中采用数字调零进行零位补偿。扣去零偏值,通过计算,在±15pF变化范围内,该测试电路的线性度为0.56%。
非线性的主要来源:1)用于标定可变电容的RCL测量仪精度所限(测量精度为0.1pF)以及可变电容的非线性造成的;2)位移测量系统的原理非线性。后期,拟设计专用标定装置进行更精确的标定。最终在加速度计联调测试中,可通过建模来补偿掉此非线性误差。
3.4 电路噪声测试
测量带宽内的电路噪声决定了加速度计的分辨率,电路噪声主要由电阻热噪声以及运算放大器的噪声组成。由于静电悬浮加速度计工作在零点附近,故可通过调节可变电容器使电路输出为零,然后使用动态信号分析仪KeySight35670A测量电路输出的噪声幅度谱。
在带宽20kHz范围内,分别测量了高压施加前和施加后的噪声。高压施加前的测量结果如图11(a)所示,计算可得带宽内噪声的平均幅度谱为1.79×10-6V/Hz1/2。电容测量增益为0.0617V/pF,计算得电容分辨率为2.90×10-5pF/Hz1/2。由位移检测电路引入的噪声折算为加速度噪声的计算公式为[15]
取加速度计敏感结构的设计参数如下:敏感质量m=1.417g,极板与法兰盘标称间隙d=30μm,UM的角频率ωM=500kHz,变压器的品质因数Q=15,代入式(31)中可计算得到, 满足加速度计的设计要求。
在施加单路350V高压控制信号条件下,位移测量电路的输出噪声幅度谱如图11(b)所示。由图11(b)可知,20kHz带宽内噪声平均幅度谱为1.82×10-6V/Hz1/2,和高压施加前相比,由高压电路引入的误差为3×10-8V/Hz1/2,不是电路噪声的主要来源。这与3.2节的分析相吻合,说明高压隔离方案设计合理,高压引入的误差可忽略不计。

图11 电路零位输出的噪声幅度谱Fig.11 Noise amplitude spectrum of circuit output at null position
3.5 增益的温度稳定性测试
为测试增益的温度敏感性,进行了25℃±1℃、ΔC=15pF条件下的增益稳定性测试,使用GraphTec GL 7000数据采集仪记录了3h内电路总增益λ·Kcu的变化情况。根据采集的数据,每5min计算一次均值,其变化情况如图12所示。

图12 电路增益的稳定性测试Fig.12 Stability test of capacitance detection circuit gain
由图12中的数据计算可得,电路的总增益初始测量值为0.061773V/pF,电路存在约1.079×10-5/h的漂移,这可能是由于电路温漂、时漂导致谐振频率漂移和放大电路的增益变化。后期,拟通过电路高低温冲击老炼、精密温控或者模型补偿进一步减小电路的漂移。
4 结论
本文针对静电悬浮加速度计的地面应用需求,提出了一种基于大表面积质量比探头结构的电容检测方案,并设计了一套电容检测电路。理论分析、仿真和初步测试结果表明,所设计的电容检测系统具有噪声低、线性度好、分辨率高的特点。此外,设计的隔离网络能够有效抑制高压悬浮信号引入的干扰,提高电容检测增益的稳定性和信噪比。在未来的工作中,将设计与之匹配的静电悬浮控制系统,研究高精度和高稳定性的位移标定装置,优化电路设计参数及悬浮控制算法,进行电路高低温冲击老炼,开展静电悬浮加速度计的地面实验研究与性能评估。
猜你喜欢
仪表技术与传感器(2022年9期)2022-11-02
心理学报(2022年10期)2022-10-12
传感器与微系统(2022年3期)2022-03-23
飞控与探测(2021年5期)2022-01-05
湖北大学学报(自然科学版)(2021年5期)2021-08-20
北京航空航天大学学报(2021年6期)2021-07-20
西江文艺(2017年15期)2017-09-10
知识就是力量(2016年6期)2016-05-31
中学生数理化·高二版(2016年5期)2016-05-14
计算技术与自动化(2014年1期)2014-12-12