神经元PID算法控制锂电池组充放电
2020-09-03 07:52韩庆康
合肥工业大学学报(自然科学版) 2020年8期
韩庆康, 李 军
(重庆交通大学 机电与车辆工程学院,重庆 400074)
锂离子电池在过充或过放时,稳定性及安全性较好,而且荷电状态(state of charge,SOC)可用范围较大,因此多节单体电池串联适用于高功率混合动力汽车(plug-in hybrid electric vehicle,PHEV)和纯电动车应用。但是电池组SOC的估算和均衡更加具有挑战性,这是由于制造工艺、老化、极化、放电倍率、工作环境都会影响单体电池的寿命及容量[1]。
目前均衡方式可以分为主动均衡和被动均衡两大类。被动均衡是依靠电阻与电池并联在一起,若某节电池电量较高,并联电阻与该电池形成回路,则电池较高的能量会以电阻热能的形式消耗掉,从而让该电池的能量接近电池组能量。主动均衡电路用到的元件主要有电感、电容、变压器、二极管、场效应管,主动均衡的目的不是把多余的能量消耗掉,而是希望基于电器元件的组合,将电池较高的能量转移到较低的电池上[2]。电容和电感均衡虽然是主动均衡,节约了能量、提高了控制效率,但仍存在一些缺点,如较高的成本、电容电感元件和开关元件电阻造成的能量丢失等[3]。文献[4]设计了模糊系统PID控制的均衡器,并在Matlab/Simulink中基于常用的均衡电路进行了仿真验证,结果表明可以有效地减少电池电压达到均衡的时间;文献[5]针对串联电池组单体电池电压不一致等问题,采用模糊控制和磁化能量转换的智能均衡方法,得出电池组单体电池SOC相差91.3%时可以自动均衡到3.9%;文献[6]为了更好地采集单体电池的各项参数,方便对电池工作时动态情况的掌握以及对电池组的管理,设计了一种基于多片LTC6803-4级联的电池管理系统(battery management system,BMS)来完善BMS功能,但是也存在成本较高、算法不稳定等缺点;文献[7]提出了一种基于次优解集扰动智能水滴算法(intelligent water drop,IWD)的PID锂电池均衡充电控制策略,探讨了PID常见的参数设定和智能水滴算法的参数优化,优化的算法提高了电池均衡效率和精度,并在Matlab/Simulink中验证表明可以有效地解决串联电池组电池充电过程中不均衡的问题;文献[8]研究了一种主动均衡的电池均衡管理系统,其均衡效率较高,但存在成本高等缺点。
目前,在电池均衡方面的研究,国内主要集中在拓扑结构与算法的结合上,加快均衡速率和收敛;国外多倾向于拓扑结构的创新,虽然从根本上创新了电池均衡模式,但仍然需要提高BMS系统的智能化、精准化。
本文结合反激式变压器的电路拓扑结构,加入单神经元PID控制算法,计算出每节电池对应场效应晶体管开关的占空比,使充电过程中电压较高的电池减少充电时间,放电过程中电压较低的电池减少放电时间,从而达到电池组所有单体电池电压快速均衡,提高串联电池组的工作效率,延长电池组寿命[9]。
1 神经元PID
1.1 神经元PID结构
传统的PID控制器输出结构公式如下:
(1)
其中,KP为比例常数;KI为积分常数;KD为微分常数;e(t)为控制变量。常规PID控制器对一个预定目标进行控制时,参数的设定通常按照预定目标的特性设定好。由于控制目标的实时动态变化很难对系数进行实时跟进[10],采用单神经元的结构来弥补常规PID这一缺点,它可以根据控制目标的实时变化来调整神经元权值,从而实现神经元PID控制器的自适应调节功能。单神经元算法结构不仅具备神经网络的自学习能力,而且结构相对简单,可以实现对控制目标的高性能控制[11]。
单神经元PID控制结构如图1所示。

图1 单神经元PID控制结构
图1中,U1(k)为控制器的设定值;U(k)为控制器最后的输出值;W1(k)、W2(k)、W3(k)为权值系数;X1(k)、X2(k)、X3(k)为状态变量,代表神经网络的输入信号,即对电池状态数据采集的训练样本;V(k)为控制变量;H为增益。图1中状态变换的计算式为:
(2)
控制量表达式为:
(3)
(4)
(2)~(4)式中运算的权值系数可以根据不同的学习规则进行调整。
1.2 单神经元PID控制算法原理
在电池均衡电路中以SOC最大的电池和SOC最小的电池差值极差r为控制目标,设定r<0.02,即达到均衡的控制目标。加入单神经元PID的目的是根据差值的波动快速计算出滤波信号的占空比(pulse width modulation,PWM),与每节单体电池开关预先设定的PWM信号相加,使得每节电池在充、放电时开关闭合、断开的时间更加合理有效,从而提高串联电池组的均衡效率。单神经元PID控制算法原理流程如图2所示。

图2 神经元PID控制流程
单神经元PID的算法流程中各环节的学习速率需要融合实验过程的具体步骤,相应地设置好每个参数。ηP、ηI、ηD分别代表比例、积分、微分学习速率常数。ηP依据偏差的大小来动作,有时又被称为增益;ηI在系统中消除余差;ηD依据偏差变化来定,系统中起超调节作用。根据经验设置好ηP的值,在充电过程中SOC趋于一致时震荡较大,可以适当减小ηP值;PWM信号上升时间过大时,可以适当增加ηP值。以SOC差值为控制目标,当差值波动较大时,适当减小ηI值,从而使控制系统稳态运行。ηP、ηI系数确定以后,ηD值的调节是使系统在稳态和动态运行时性能指标有所提高。
1.3 均衡电路
主动均衡电路拓扑结构主要分为电容型、电感型和变换器型。本文采用常见的反激式变压器式均衡电路,通过改变路中场效应开关的PWM改变输出电压。反激式变压器均衡电路如图3所示。
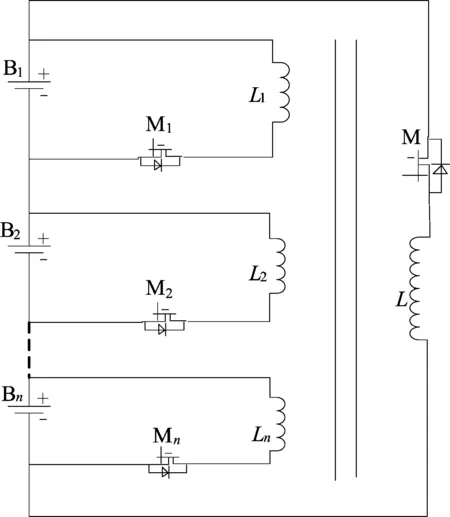
图3 反激式变压器均衡电路
反激式变压器是因输出端在原边绕组断开电源时磁通量发生变化获得能量而得名,其具有电路结构简单、成本较低廉、转换效率高、损失小、输入电压范围宽比较大等优点,但也有输出负载精度不高、设计迭代过程较复杂等缺点。
反激式变压器一般有DCM和CCM 2种工作模式。电感电流不连续模式DCM又称为“完全能量转换”,这时变换器内存在较高的非线性内阻;电感电流连续模式CCM又称为“不完全能量转换”,此模式下输出的电压与输出的电流大小无关。
电池充、放电示意图如图4所示。

图4 电池充、放电示意图
反激式变压器电路拓扑结构还可以保护均衡电路,设定阈值后,计算每个均衡开关的PWM信号,以防止电池充、放电时间太长。该电路拓扑结构的优点为电路原理及结构简单、转换效率较高、损失相对较小,即使输入的电压范围波动较大,也可以保证有稳定的输出。当然也存在输出电压有较大的纹波,变压器有直流电流成分且有可能会出现CM/DCM 2种模式同时工作的情况,因此设计困难。
2 仿真验证
为了验证电路加入神经元PID滤波后的效果,在Matlab/Simulink中建立模型。充电时选取6个额定电压一致的锂电池串联成电池组,6个锂电池初始SOC分别为96%、95%、94%、88%、87%、85%;放电时6个锂电池初始SOC分别为9.6%、9.5%、9.4%、8.8%、8.7%、8.5%。充、放电神经元PID控制原理如图5所示。
充电过程中有、无神经元算法的PID充电SOC变化曲线如图6所示。
图6a为未加入神经元算法时电池组达到均衡的效果图,此时电池SOC达到一致所需要的时间为1.005 0×103s;图6b为加入神经元算法以后电池组达到均衡一致的效果图,此时电池SOC达到一致所需要的时间为 0.945 1×103s,比未加入神经元的快60 s左右,均衡效率提高了约5.9%。
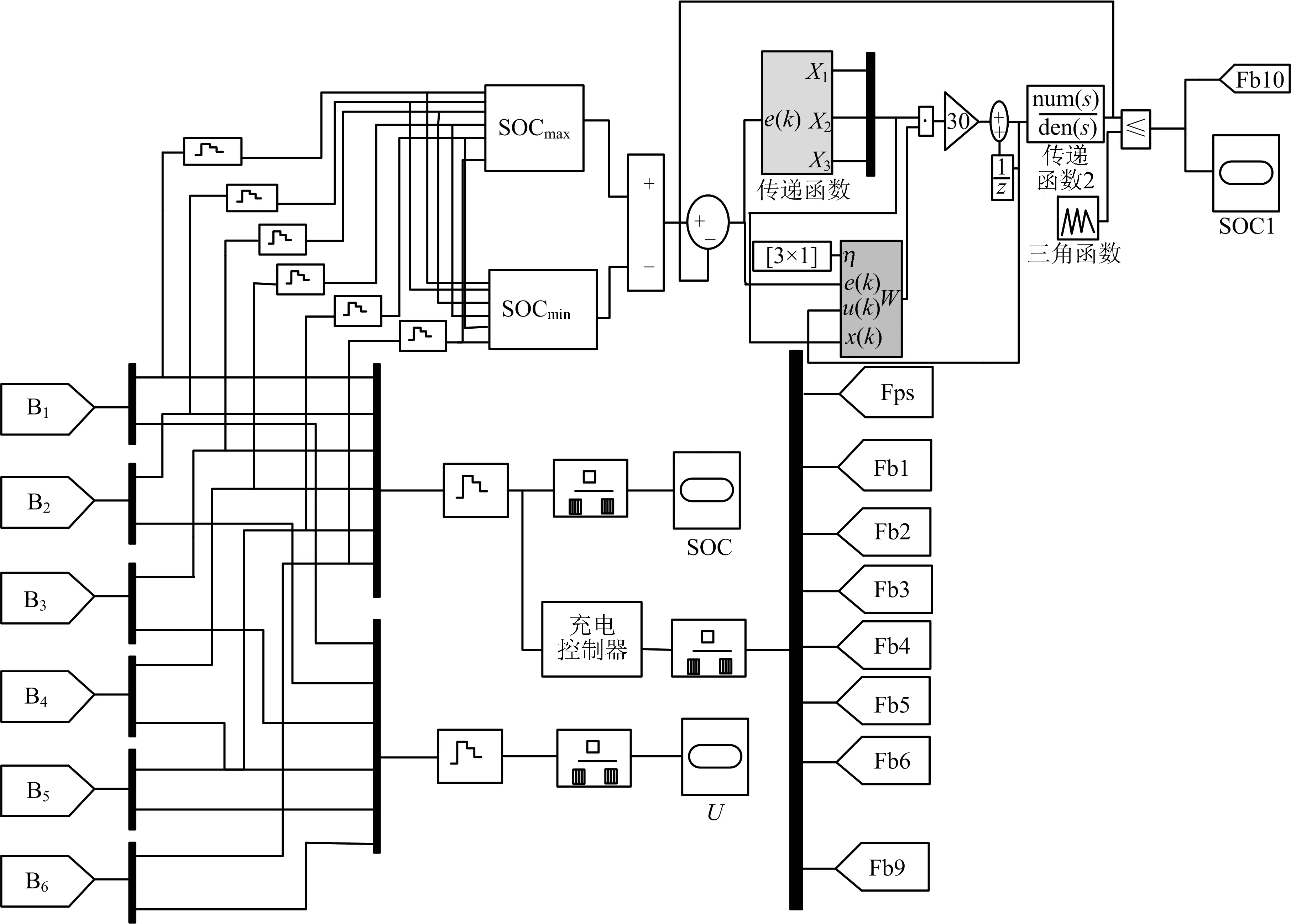
图5 充、放电神经元PID控制原理

图6 有、无神经元算法的PID控制充电SOC变化曲线
放电过程中有、无神经元算法的SOC变化曲线如图7所示。
图7a为未加入神经元时PID控制的锂电池放电SOC变化曲线。由图7可知,放电过程中,在0.245 6×103s后锂电池达到放电均衡一致,而加入神经元算法后在0.180 6×103s后达到放电均衡一致,相比之下时间缩短了65 s,均衡效率提高了26.4%。
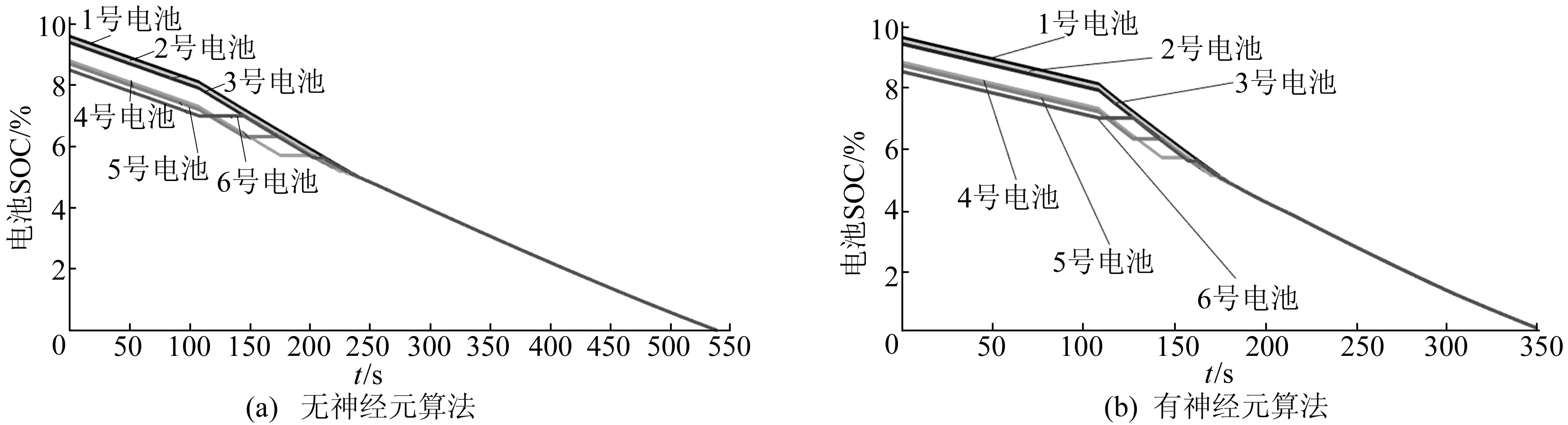
图7 有、无神经元算法的PID控制放电SOC变化曲线
3 结 论
传统均衡电路对串联电池组的均衡效率较差。为了对传统电路拓扑结构的均衡效果优化,本文提出在反激式变换器电路拓扑结构基础上加入神经元PID算法,使得Mos开关输入最佳占空比PWM。在Matlab/Simulink中进行仿真验证,结果表明:
(1) 在充电过程中,神经元PID算法控制电路均衡时间缩短了约60 s,均衡效率提高了约5.9%。
(2) 在放电过程中,神经元PID算法控制电路均衡时间缩短了约65 s,均衡效率提高了约26.4%。
(3) 在电路模型中引入神经元算法后,缩短了串联电池组均衡时间,提高了均衡效率。单神经元的权值系数结合PID控制的特点,可以通过不断地调整优化,使算法输出后的信号为最优值,控制开关的PWM时间。
猜你喜欢
少男少女·教育管理(2022年3期)2022-05-12
电子产品世界(2021年8期)2021-01-16
中国疼痛医学杂志(2019年9期)2019-01-04
消费导刊(2017年19期)2017-12-13
电子制作(2017年7期)2017-06-05
创新时代(2016年8期)2016-10-21
作文周刊·小学一年级版(2016年11期)2016-05-10
汽车电器(2014年5期)2014-02-28
汽车电器(2014年5期)2014-02-28
中学科技(2009年6期)2009-07-30