基于麦克纳姆轮的喷药机器人底盘运动轨迹研究
2020-08-25 07:16王龙宁林丰山
湖北农机化 2020年10期
王龙宁 林丰山
(西北农林科技大学,陕西 杨凌 712100 )
0 引言
目前,国内的农作物产业中果实的喷药一般采用人工方式,同时,为了保证果实的质量,必须做到及时喷药。这就要求在相应的时间及时喷洒农药,必须投入大量的人力、物力、财力,使得喷药成为整个农作物果实生产链中较为耗时耗力的环节,而且由于农药对人体的不利影响,此种方法较不可取。因此,对于喷药机器人的需求以及设计制造应运而生,通过运用喷药机器人来降低生产成本。
基于麦克纳姆轮的喷药机器人底盘,整体采用车式底盘,车体采用麦弗逊式独立悬架,由于每个车轮上单独有电机控制,可适应不同的地形进行自适应调节。针对平坦地形喷药机器人具有2种典型的行进方式,前进和横移。本文则着重研究这横移行进方式的运行机理,指出横移行进方式相比于一般底盘的优点,为基于麦克纳姆轮底盘的喷药机器人的进一步智能化研究提供参考。
1 喷药机器人的机械结构
图1为一种基于麦克纳姆轮底盘的喷药机器人底盘。该机器人底盘由麦克纳姆轮、麦弗逊独立悬架和电机、支撑车架四种装置组成。

图1 基于底盘的喷药机器人
2 喷药机器人的横移行进方式研究

1.小辊子;2.联轴器;3.轮子轮廓图2 麦克纳姆轮实物图
麦克纳姆轮的突出应用是通过使用该轮让机器人的移动机构变成全向移动机构,实现横向、纵向、零半径旋转3个方向的运动[1],本文麦克纳姆轮喷药车底盘的驱动方式是四轮单独驱动,每个麦克纳姆轮都配备一个直流电机来进行控制。底盘在运动时,通过对不同的麦克纳姆轮所受轴向力的合成,就能判断机器人的运动方向,麦克纳姆轮上分布许多各自独立的小辊子,小辊子不仅可以绕车轮轴线进行公转和绕辊子的轴线进行自转,还能绕辊子与运动地面的接触点进行转动,这使麦克纳姆轮具有3个自由度的运动特点。车轮的布置对全向车辆的性能有一定的影响[2],不同的车轮布可实现不同效果,本文底盘设计中使用了4个麦克纳姆轮,车轮俯视X型安装,如果要实现某一方向上的运动,如横移运动,可通过轴向摩擦力的合成,小车所受的纵向分力被相互抵消,只保留了横移方向的分力,从而让移动机器人产生横移的运动。如图3所示,麦克纳姆轮底盘进行横移运动时,四个轮子的角速度相同,每个轮子的小辊子轴线方向都有独立的轴向摩擦力,通过轴向摩擦力的合成,小车所受的纵向分力被相互抵消,只保留了横移方向的分力,从而让移动机器人产生横移的运动。相比于一般底盘的旋转运动,横移运动节省了大量时间,同时保证了车体的稳定性和运动平顺性。
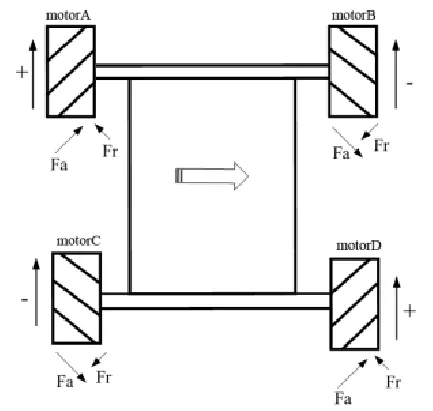
图3 横向运动
以车体为中心做笛卡尔坐标系,假设各轮角速度分别为ωA、ωB、ωC、ωD,各轮小辊子的速度分别为vg1、vg2、vg3和vg4,小车的横向速度、纵向速度和自转角速度分别是Vx、Vy和ω,对车体进行速度分析。
以轮A为例,车轮转动中心OA在全局坐标系XOY中的移动速度为:
OA在局部坐标系X1OAY1的移动速度为:
由公式(1)和(2)可得:
求得:
其余各轮受力及速度分析同A轮,经验证得,本文设计的系统具备良好的全向移动的能力。实验证明,在合理地控制4个麦克纳姆轮的角速度的条件下,就能实现基于麦克纳姆轮的喷药机器人底盘的各种运动形式,。
在复杂地形运动时,主动式麦弗逊式悬架作为成熟车辆目前使用最先进的悬架系统,能根据实时工况,主动及时地调整和产生所需悬架控制力,使悬架处于最优的减振状态[3]。同时,每个车轮单独电机控制,各路电机可根据微型主控板发出的PWM脉冲信号进行不同的转速配比,可以使每轮的速度不尽相同,从而达到精准调速的功能,使机器人底盘拥有较好的驱动力,保证在某一麦克纳姆轮发生打滑等其他失效形式的情况下及时调整姿态,完成任务,以上两点可保证基于麦克纳姆轮的底盘可适应不同的地形条件,对系统的自适应程度做了有效提高。
3 结论
根据建立车体模型及受力实验可精准确定基于麦克纳姆轮的喷药机器人底盘运动轨迹,横移运动方式使基于麦克纳姆轮的喷药机器人底盘可更高效地完成喷药作业,主动式麦弗逊式悬架保证了车体运行的稳定性,单独电机控制保证了车体的容错性。随着基于底盘的喷药机器人不断完善,实现崎岖路面上的精准前行,为人类提供更加高效精准的果实喷药工作将逐步成为可能。
猜你喜欢
城市轨道交通研究(2022年2期)2022-11-18
科学技术创新(2022年26期)2022-09-26
信息记录材料(2022年3期)2022-05-17
今日农业(2021年13期)2021-11-26
农家参谋(2020年6期)2020-07-29
新商务周刊(2019年12期)2019-08-08
汽车实用技术(2018年13期)2018-07-26
专用汽车(2016年12期)2016-02-11
建筑工程技术与设计(2015年22期)2015-10-21
山东工业技术(2014年20期)2014-10-21