
Possibilities of urban flood reduction through distributed-scale rainwater harvesting
2020-08-18 09:05AyshaAkterAhadHasanTanimMdKamrulIslam
Water Science and Engineering 2020年2期
Aysha Akter *, Ahad Hasan Tanim , Md. Kamrul Islam
a Department of Civil Engineering, Chittagong University of Engineering & Technology (CUET), Chittagong 4349, Bangladesh
b Center for River, Harbor and Landslide Research, Chittagong University of Engineering & Technology (CUET), Chittagong 4349, Bangladesh
c Department of Urban and Regional Planning, Chittagong University of Engineering & Technology (CUET), Chittagong 4349, Bangladesh
Abstract Urban flooding in Chittagong City usually occurs during the monsoon season and a rainwater harvesting (RWH) system can be used as a remedial measure. This study examines the feasibility of rain barrel RWH system at a distributed scale within an urbanized area located in the northwestern part of Chittagong City that experiences flash flooding on a regular basis.For flood modeling,the storm water management model(SWMM) was employed with rain barrel low-impact development (LID) as a flood reduction measure. The Hydrologic Engineering Center's River Analysis System (HEC-RAS) inundation model was coupled with SWMM to observe the detailed and spatial extent of flood reduction.Compared to SWMM simulated floods,the simulated inundation depth using remote sensing data and the HEC-RAS showed a reasonable match,i.e., the correlation coefficients were found to be 0.70 and 0.98, respectively. Finally, using LID, i.e., RWH, a reduction of 28.66% could be achieved for reducing flood extent. Moreover, the study showed that 10%-60% imperviousness of the subcatchment area can yield a monthly RWH potential of 0.04-0.45 m3 from a square meter of rooftop area.The model can be used for necessary decision making for flood reduction and to establish a distributed RWH system in the study area.
© 2020 Hohai University. Production and hosting by Elsevier B.V. This is an open access article under the CC BY-NC-ND license (http://creativecommons.org/licenses/by-nc-nd/4.0/).
Keywords: Low-impact development (LID); SWMM; HEC-RAS; Remote sensing; Urban flooding; Inundation depth
1. Introduction
Urban flooding has been occurring frequently in Chittagong City during monsoon seasons.With an average annual rainfall of 3 000 mm, almost one-third of the city remains inundated during the period from May to July (Das, 2014). Along with the rapid urbanization, change in rainfall patterns and tidal effects result in regular storm water logging and some parts remain inundated for longer periods, up to August (Alamgir,2012; Boukari and Guiraud, 1985; Islam, 2009). The undulated topography is supposed to have the advantage of quick disposal of runoff.Unfortunately,the existing drainage system fails to provide proper management. In this respect, there is a need to reduce the storm runoff through rainwater harvesting(RWH). Low-impact development (LID) is one of the frequently applied practices for reduction of the negative impact of land use changes and maintenance of the whole urban hydrology (Fletcher et al.,2015). Generally,the goal of LID as a micro-scale control practice is to mimic the natural hydrologic functions of an area, including the runoff volume and frequency (HBRI, 2015). The implementation of LID practices is driven by fundamental hydrologic considerations,including organization of the runoff volume, minimization of the peak runoff rate, management of the flow frequency/duration,and control of water quality(Ahiablame et al.,2013;Askarizadeh et al., 2015). Thus, the practice of LID can be employed as a means of flood reduction and mitigation in urban areas, with the capability of diverting runoff for household purposes and/or infiltration through groundwater recharge (Ahiablame and Shakya, 2016; Morsy et al., 2016).In addition to this, the runoff quality can be improved by reducing the pollutant load along with a number of water quality parameters (nitrogen, phosphorous, and suspended solids) and their concentrations within allowable limits (van der Sterren et al., 2014).
LID technologies can be broadly classified as infiltrationbased (i.e., those that provide base flow) and harvestingbased (those that divert runoff away from stream).Infiltration-based LID includes permeable pavement (Palla and Gnecco, 2015), infiltration trenches (Harrington, 1989),and bio-retention cells or rain gardens(Atchison et al.,2006).At the same time, harvesting-based LID technology is accomplished utilizing green roofs, rainwater tanks, and wetlands. Askarizadeh et al. (2015) suggested that environmentally friendly LID technologies be selected based on four criteria: selection of the right mix based on landscape facilities, incorporation with the drainage systems, monitoring of their long-term performance, and maximization of their cobenefits, i.e., flood reduction. Considering the importance of RWH systems in terms of improved water quality and quantity,recent building codes in Bangladesh have incorporated RWH into their building guidelines (HBRI, 2015). Cities in Bangladesh have already developed without storm water regulation, and adaptation of LID technologies at the large watershed scale needs to be examined in order to aid the achievement of co-benefits. Recently, retrofitting LID has demonstrated its potential around the world, considering the extreme events of different return periods, rain gardens, rain barrels, and porous pavement (Ahiablame and Shakya, 2016;Morsy et al., 2016). Examples are also available of implementation of green infrastructure such as rain barrels at the practical level to remove surface runoff effectively. For storm water management in a highly impervious catchment, the distributed or decentralized LID and proper spatial patterns showed themselves to be a better option than a centralized system (Damodaram et al., 2010; Loperfido et al., 2014;Shuster and Rhea, 2013).
To evaluate the potential of LID in flood reduction, the selection of proper LID technologies depends on multidisciplinary factors, i.e., landscape characteristics; open space availability; socio-economic conditions; climate, human, and technical resources, etc. (Barbosa et al., 2012). Thus, special effectiveness in flood reduction should be emphasized for adopting the proper LID technology (Table 1). Unfortunately,there have been few published works available on potentiality evaluation. Among them is the recent work on rooftop RWH considering socio-economic conditions of the city by Akter and Ahmed (2015). To overcome the scarcity of potable water in the city water supply system during the dry season,rooftop RWH systems proved to be a better option in a selected part of Chittagong City (Akter and Ahmed, 2015).Thus,there is a need to review the potential of RWH in surface runoff reduction during floods.
Published studies on urban flooding include the Hydrologic Engineering Center's Hydrologic Modeling System (HECHMS) coupled with atmospheric models for prediction of watershed runoff (Anderson et al., 2002) and remote sensingsupported hydrological models (Verbeiren et al., 2013). HECHMS has been used to calculate runoff generation and the integrated Markov Chain and Cellular Automata model (CAMarkov model) has been involved in future land use map development(Du et al.,2012).Involvement of satellite images and a GIS has added a new dimension to feature urban flooding, and recent studies have considered coupling with remote sensing over distributed model predictions, i.e.,coupling of the GIS,HEC-HMS,and/or next-generation radar(NEXRAD)rainfall(Bates,2004;Halwatura and Najim,2013;Knebl et al.,2005).Radar rainfall with a fully integrated realtime flood forecasting system like STORM software has also been developed in the UK (Cluckie and Han, 2000). Hydrologic modeling for urban areas often faces difficulties, with inadequate information on physical characteristics of thewatershed,i.e.,land use,soil properties,basin slopes,climatic factors, and feature surface runoff. The shape, timing, and peak flow of a stream flow hydrograph are significantly influenced by spatial and temporal variability in rainfall and watershed characteristics.Thus,the modeler often experiences challenges in selecting a model to feature both hydrologic and hydraulic parameters. Along with knowing hydrological phenomena,a flood inundation map is essential,and usually used to represent a flood event. The GIS-based Hydrologic Engineering Center's River Analysis System (HEC-RAS) tool is commonly used to prepare this map (Moya Quiroga et al.,2016; Sarhadi et al., 2012; Knebl et al., 2005). In addition to this,to represent the specific rainfall-runoff characteristics,the storm water management model (SWMM) has performed reasonably better in urban fringes (Elliott and Trowsdale,2007; Palla and Gnecco, 2015; Liu et al., 2016). Furthermore,impacts of urbanization on hydrology and water quality are envisaged to be minimized with the use of LID practices in urban areas.Thus,runoff reduction has been found to be 2%-12% (Ahiablame et al., 2013) and 45% (Palla and Gnecco,2015). Bowman et al. (2012) evaluated LID using multiple approaches to support stakeholders, i.e., to aid the decision support system (DSS). SWMM has already shown potential for featuring hydraulic and hydrologic responses while being used with HEC-HMS and HEC-RAS (Suriya and Mudgal,2012). Thus, in addition to SWMM, application of HECRAS with geospatial data processing in ArcGIS HECGeoRAS might be a useful approach to simulating the flood inundation depth compared to a remotely sensed image.Finally, to reduce the stagnant water depth using SWMM, an assessment of rain barrel-type LID at a distributed scale could provide suitable information for the study area.

Table 1 Effectiveness of different LID technologies in flood reduction.
2. Materials and methods
This study adopted a numerical modeling approach to improve the understanding of distributed-scale LID practices.A hypothetical scenario before and after implementation of LID was tested using the US Environmental Protection Agency (EPA) SWMM. This section describes the stepwise data preparation for the subcatchment-scale flood modeling and then the LID implementation. Finally, the model was evaluated using satellite images to justify the predicted scenario.
2.1. Study area
Chittagong, the second largest city of Bangladesh, usually experiences a tropical maritime climate with a mean annual temperature of 22.4°C and a mean annual precipitation of 3000 mm, and 85%-90% of this occurs from May to September as per Bangladesh Meteorological Department(BMD) records. Thus, Chittagong frequently suffers from heavy storms during the monsoon season, i.e., from June to August. An area selected from the northwestern part of this city covers around 23.14 km2(Fig. 1). This area still seeks effective flood mitigation measures as well as efficient planning for further urbanization to reduce rain-induced flash floods. Thus, there is a need to check the LID option as a mitigation measure.
2.2. Data preparation
The SWMM model comprises three hydrologic processes:infiltration, surface runoff, and flow routing. To consider the varieties of land cover in the study area, the National Resources Conservation Services (NRCS) curve number (CN)method was adopted in runoff estimation. The required secondary data includes digital elevation model (DEM), demographic, hydrological, spatial, soil, and land use data, in order to determine physical properties of subcatchments. The DEM was based on 20-cm contour intervals acquired from a 2012 field survey by the Chittagong Development Authority(CDA). Spatial data such as ward boundary, drainage networks, and water body vector data were collected from the CDA from the 2006 survey. From January 1, 2013 to December 31, 2014, hydrological data, i.e. precipitation,evapotranspiration, wind speed, radiation, and temperature,were collected for the Bangladesh Meteorological Department(BMD) Potenga Weather Station (22.26°N, 91.81°E). The demographic data, i.e., population data and density, were obtained from the Bangladesh national census of 2011. A land use image that avoided dense cloud coverage was retrieved on December 1, 2013 from the Landsat_8 (USGS, 2015).
Initially, the DEM reconditioning was done with stream vector data using the HEC-GeoHMS terrain pre-processing tool. Then, the sinks were filled in Hydrologically conditioned DEM (Hydro-DEM). Flow direction and flow accumulation raster data were processed. Then, stream segmentation was obtained. Stream networks were based on the CDA master plan. Catchment grid delineation was carried out and the study area was divided into 11 subcatchments(Fig.1).Thus,the obtained subcatchments were influenced by six factors:cell resolution of the DEM,accuracy of the DEM,depression of the DEM if there was any effect on stream lines and boundaries,flow direction,flow accumulation,and stream network.

Fig. 1. Study area.
Using the raw DEM as a grid layer, HEC-GeoRAS was used to create channel topography along the stream network.The cross-sections were the principal data constructed using HEC-GeoRAS and digitized across the floodplain area to capture the profile of the land surface. Bank lines, ineffective areas, and flow path centerlines prior to the layout cut line locations were adopted. Once the RAS layers were created,HEC-GeoRAS tools were assigned to populate attribute data.Lastly, a total of 226 cross-sections were imported into SWMM as transects (irregular cross-sections).
In this study,a land cover map was classified in five classes,vegetation, water body, built-up area, sand, and open space,through supervised classification using ERDAS IMAGINE software (Lillesand et al., 2008). In supervised classification,spectral signatures were collected as training datasets by digitizingvarious polygonsoverdifferentlanduse types.The spectral signatures were then used to classify all pixels in the image.The supervised classification was generally followed by knowledgebased expert classification systems depending on reference maps(Evrendilek and Berberoglu,2008).This approach allowed reasonable classifications of satellite images and was applied at the individual pixel level.Agreement/accuracy is the probability of a reference pixel being correctly classified.The total classification accuracy is the overall accuracy. Kappa analysis is a discrete multivariate technique that was used in accuracy assessment.The Kappa coefficient(K)can be used as a measure of agreement between model predictions and reality or to determine if the values contained in an error matrix represent a result significantly better than random (Congalton, 1991; Jensen and Cowen,2011).Thus,for the obtained map,the average classification accuracy andKwere 85%and 0.81,respectively(Table 2,Fig.2(a)).Basedonzonal analysisofthe obtainedslope raster,the slope (%) of each subcatchment was calculated with ArcGIS(Fig. 2(b)). Summary catchment physical properties are presented in Table 3.Kis computed as follows:
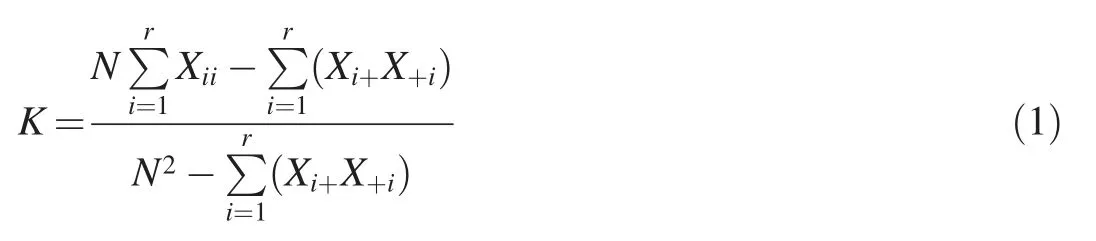
whereris the number of rows and columns in the matrix;Xiiis the observation in rowiand columni;Xi+andX+iare the marginal totals of rowiand columni, respectively; andNis the total number of observations (Bishop et al., 1975). The overall accuracy ranges from 0 to 1, and theKvalue is between -1 and 1.

Table 2 Accuracy totals of supervised image classification.

Fig. 2. Topographical data for study area.
Since most impervious areas are paved with asphalt, for a built-up concrete area an average Manning'snvalue of 0.011 was used from the suggested range of 0.011-0.013 (Schwab et al., 1993; Bizier, 2007). Water stored as depression storage in impervious areas is depleted by evaporation. A relationship for impervious depression storage versus catchment slope has been developed as follows (Kidd, 1978):

whereDpis the depression storage (mm),Ris the correlation coefficient, andSis the catchment slope (%).

Table 3 Subcatchment properties.
CROPWAT 8.0 software was used in this study to calculate evapotranspiration (ET0) using the Penman-Monteith method.The method provides more consistent values with actual crop water usage data worldwide. From the original Penman-Monteith equation and the equations of the aerodynamic and surface resistance, the FAO Penman-Monteith method used to estimateET0is expressed as follows:

whereET0is reference evapotranspiration (mm/d),Rnis the net radiation at the crop surface (MJ·m-2·d-1),Gis the soil heat flux density (MJ·m-2·d-1),Tis the mean daily air temperature at 2 m height (°C),u2is the wind speed at 2 m height(m/s),esis the saturation vapor pressure(kPa),eais the actual vapor pressure (kPa),es-eais the saturation vapor pressure deficit (kPa), Δ is the slope vapor pressure curve(kPa/°C), and γ is a psychrometric constant (kPa/°C).
Based on the time series dataset from the Potenga meteorological station (latitude 22.6°N and longitude 91.81°E) and climatic information (temperature, humidity, sunshine, and wind speed), evapotranspiration was calculated for 2013 and 2014.A daily time series of evaporation was used in the model.
2.3. Model setup
2.3.1. Physical properties
This study intended to work with SWMM,and in this regard data preparation was supported by a GIS and HEC-GeoRAS.The topography of the study area was created by combining(1)the drainage master plan,(2)a water body identified with a CDA boundary area,(3)the subcatchment boundary created by the GIS using HEC-GeoHMS,and(4)river center lines,crosssections, and bank lines predefined by HEC-GeoRAS. The acquired cross-sections were defined as transects in SWMM,including nodes.All those features were imported from the GIS to obtain the drainage network and subcatchment boundaries.
In HEC-GeoRAS, drainage networks were identified by assigning drain and reach details, which were connected by a junction in SWMM linking each node by a transect. For our study, 226 transects, including roughness values and bank stations, were imported from HEC-GeoRAS. Then, in SWMM,a total of 220 junction nodes were stationed at crosssections. Here, the depth and invert elevation of each node were based on the channel cross-sections' maximum and minimum elevations.Drains were represented as links(Fig.2)in SWMM and 226 links were drawn. There were seven free outfalls located in the study area, and out of them four were located in the Karnafuli River.
2.3.2. Hydraulic properties
The existing flow system is a combined-sewer overflow type with a mixture of storm drainage and municipal-industrial wastewater discharged from combined sewers or dry weather flow(DWF).DWF-carrying nodes were identified from a field survey to provide inflow to the study area. An hourly time series of inflow data was engaged to produce the required dry weather flow curve. Computation of dry weather flow was conducted as follows:

whereQiis the inflow;QDWFis the average DWF;andMhandMdare multiplying factors, withMhbeing the hourly pattern andMdbeing the daily pattern.
On the basis of a DWF-carrying conduit,the study area was zoned as industrial, commercial, and residential sections.Demographic data were obtained to determine the density of the study area. Circular conduits most often prevailed in the study area to carry DWF.Estimated flow was checked with the minimum velocity and maximum capacity of conduits.
Dynamic wave routing solves the complete onedimensional Saint-Venant flow equations and therefore produces the most theoretically accurate results. This method consists of the continuity and momentum equations for conduits and a volume continuity equation at nodes. This method can also consider the backwater effect due to downstream flow restrictions and with flow regulation via weirs and orifices.Thus, dynamic wave routing was used as the routing method with a time step of 50 s.
2.3.3. Low-impact development (LID)
Distributed rain barrel LID control was applied rather than demand-driven yields. It consists of three major components:the collection catchment (LID subcatchment), a tank in the form of a rain barrel or cistern, and a dual pipe network to supply runoff for household purposes or excess runoff at the sewer. The underdrain flow process is as follows (Rossman,2010):

whereqis the outflow per unit barrel area(mm·h-1·m-2);his the height of the rain barrel;nis set as 0.5 to cause the drain to act as an orifice; and the coefficientC= 2D0.5/T, whereTis the time required to drainDdepth of water. The storage capacity of LID depends on theCvalue, which correlates with assuming a demand of 120 L per capita per day (Campisano et al., 2017).
The water land use represents streams, ponds, and reservoirs and was assumed to be 100% impervious because precipitation falling onto this surface type is directly available in the stream or pond. Thus, to assess potentiality, the following expression was used:

whereApis the potential LID subcatchment area,Atis the total area of the subcatchment,andAbis the percentage of built-up area.
Two different scenarios were featured in SWMM using the distributed LID effects to compare the situations before and after the flood event. Considering the LID effect, the model setup was done with the assumption that all runoff generated from the rooftop is diverted to the rain barrel. The scenario is generated in SWMM as follows:
(1) The subcatchment area was classified based on perviousness or imperviousness, while the impervious areas were only the built-up areas. To predict the possibility of rainwater harvesting it was assumed that the rooftop of the total built-up area will catch the runoff and a typical 1 200-mm-high rain barrel LID will collect the runoff of each building.Since LID control is defined on a per unit area basis,the runoff is diverted to the impervious built-up area.
(2) LID subcatchments were created with common outlet nodes so that the surface runoff of each LID subcatchment could be quantified in terms of total runoff.
(3) Subcatchment area and width, subcatchment imperviousness, and curve number were adjusted to compensate for the original subcatchments. In this case, the land use area containing water was only treated for the impervious area for the following original subcatchments (see Table 4).
3. Model calibration
3.1. Remote sensing and SWMM
It is difficult to get an optical satellite image cloud-free during rainfall due to the existence of cloud cover on the image. Therefore, during water pixel classification, errors might exist when (1) similar pixel values cause confusion between flooded regions and cloud shadows, (2) cloud cover shades over a significant flooded area and these cells are mistakenly not accounted for, or (3) areas of less intense floods are omitted from the extraction because their values are close to or equal to the cloud pixels. The time of image collection may also be a significant factor in model error.The described difficulty of analysis of the Landsat image can be inferred for inundation model calibration as well, and those factors were considered for image acquisition.
3.1.1. Normalized difference water index for surface water
The normalized difference water index(NDWI)is a method of extracting water pixels from a remote sensing image.However, different environments around water can have different effects on the water pixels. For example, when the water body is located in an urban area,theNDWIcomputation needs specific attention on the spectrum difference of buildings and water pixels. The spectrums of water and buildings will affect each other on the edge of the water body;when the image contains rural and open country,the extraction of water is mainly concentrated on the effect of vegetation or soil.Here the values range from 0.50 to 0.95. High values represent the deep and extended water masses.NDWIproposes to identify the waterlogged areas using green light and near-infrared reflectance (NIR). Before identifying the waterlogged area,data required for different corrections, such as haze reduction and atmospheric correction,were dealt with.This index can be calculated as follows:

Table 4 Potential rainwater harvesting area.

whereXGis the green light reflectance band andXNIRis the near-infrared band of a Landsat image,and the output file was formatted as 32-bit, floating point (Mcfeeters, 1996). In this study,NDWIvalues for May 18,2014 and December 21,2014 were between +0.55 and +0.90 and between +0.50 and+0.99, respectively. The inundation extended over the subcatchment area is summarized in Table 5.
3.1.2. Waterlogged depth calculation
The waterlogged depth-predicting equation relating hydraulically assisted bathymetry (HAB)-1 estimated depths to digital number (DN) values for the imagery was (Fonstad and Marcus, 2005) as follows:

whereB3andB2indicate, respectively,the band 3 and band 2 of the Landsat-8 satellite image, andDis the water depth of the waterlogged area.
The generic term for pixel values is DN, which is commonly used to describe pixel values that have not yet been calibrated into physically meaningful units.
As a representative Landsat image was available for May 18,2014(acquisition time:16:15:37),SWMM calibration was carried out for water depth at node comparison (Fig. 3). The comparative attempt resulted in a reasonable relationship(Fig. 3(b)) between the SWMM and remote sensing records for the selected day.
3.2. HEC-RAS and SWMM
The HEC-RAS model is based on a computed average of the upstream and downstream input sections,whereas SWMM assumes the conduit is rectilinear. The hydraulic grade line(HGL) obtained in SWMM is compared with the HGL obtained in HEC-RAS on May 18,2014(16:00).Comparison of the energy grade line of the SWMM dynamic wave routing simulation versus the simulated HEC-RAS steady state conditions results in a coefficient of determination (R2) value of0.979 2(Fig.4).HEC-RAS uses a composite roughness based on the horizontal flow conveyance, whereas SWMM uses an area-weighted composite roughness. Thus, the hydrograph obtained by SWMM dynamic wave routing can be used for HEC-RAS inundation mapping considering the steady state case for the study area.
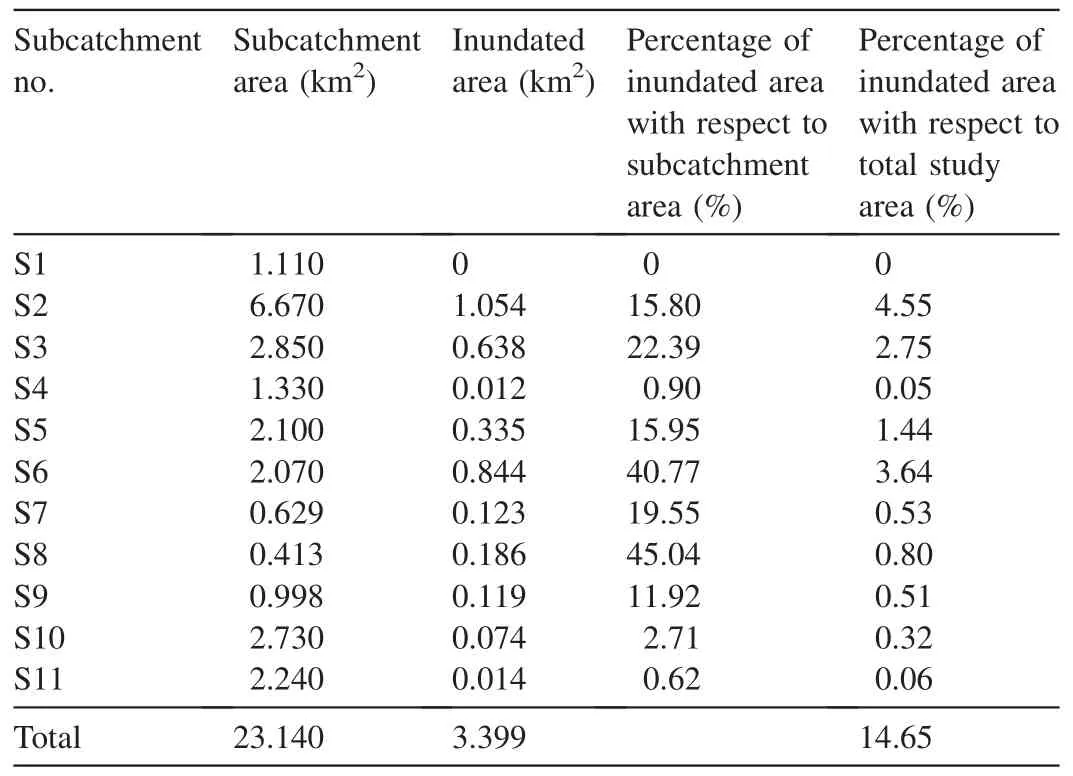
Table 5 Inundation extent based on Landsat image for May 18, 2014.

Fig. 3. Comparing model outcomes using remote sensing and SWMM.

Fig. 4. Calibration of depth obtained by HEC-RAS compared to SWMM.
The inundation extent of May 18, 2014 showed noticeable inundated areas for subcatchment numbers S5,S6,S7,and S8,and for S8 this reached 45% of the respective subcatchment area. The channel carrying runoff from those subcatchments was selected for floodplain mapping using HEC-GeoRAS.The channel cross-sectional (49 cross-sections) data was imported from HEC-GeoRAS and a Manning'snvalue was selected from field survey data. The HEC-RAS steady flow condition was tested for calculating the water surface profile for steady gradually varied flow in mixed regime conditions (supercritical and subcritical conditions). Furthermore,this analysis was applied for flood plain delineation based on the maximum flooded area identified in Table 5. Flow data and boundary conditions for each profile are as follows:
(1) Profile 1 (calibration): the flow obtained on May 18,2014 (16:00) from SWMM.
(2) Profile 2 (discharge with LID condition): the peak flow obtained on June 22,2014,i.e.,the highest urban flooding day.Discharges are described in Table 6 with LID condition.
(3) Profile 3 (discharge without LID condition): Profile 3 was generated simulating the flood scenario on June 22, 2014 excluding the LID condition. The selected node discharge is described in Table 6.
As the water surface (WS) elevation upstream and downstream is known from SWMM, boundary conditions can be applied in HEC-RAS.Flow change location is implied,where inflow (dry weather flow) is added in the node.
4. Possibilities of urban flood reduction
Floodplain delineation was carried out to rasterize in a floodplain grid to obtain inundation maps and inundation depth. The floodplain was calculated where the water surface grid was higher than the terrain grid.The bounding inundation polygon was used to limit the floodplain to the area modeled in HEC-RAS.This is the boundary of the inundated area(Fig.5)that can be signified as the inundated extent during the peak discharge with or without the LID effect of the drain on June 22, 2014.
The US EPA SWMM was engaged to evaluate the effects of LID on the flood reduction. SWMM consists of a dynamic rainfall-runoff module and a hydraulic module for simulation of runoff quantity and quality from primarily urban areas. In the model, LID controls are represented by a combination of vertical layers whose properties (such as thickness, voidvolume, hydraulic conductivity, and underdrain characteristics) are defined on a per-unit-area basis. Then, these LID controls can act as separate subcatchments at any desired size(or areal coverage). The hydrograph comparison was carried out for cases before and after the LID effect (Figs. 6 and 7;Table 7). From the obtained hydrograph the peak discharge was reduced by up to 28.66% in subcatchments after the LID effect (Fig. 8). The inundation extent and depth subsequently decreased after the LID condition was applied. Finally, both raster images were compared to determine the overall reduction of the flood and its extent (Fig. 9). A maximum depth of 0.65 m of inundation can be reduced for the flood event.

Table 6 HEC-RAS steady state boundary conditions.
The RWH potential steadily increased with subcatchment imperviousness and demonstrated a reasonable fit with a third degree polynomial(Fig.10).Beyond 60%imperviousness,the RWH yield of subcatchment S7 was reduced (Table 7). The reason was primarily the high drainage density of the subcatchment.It is significant that subcatchment S7 had significant runoff loss from LID due to surface overflow(Table 7)as well as presence of the highest mean slope,i.e.,4.78%(Table 3).The under-drained flow (Eq. (7)) had an insignificant contribution as it was restricted by the maximum threshold of 0.55 mm·h-1·m-2.Regardless of the case,it can be concluded that in a subcatchment an increasing percentage of built-up area can yield higher RWH potential with a maximum monthly volume of 0.55 m3from the unit square meter rooftop area(Fig.10).The outcome can be used to determine the rain barrel capacity in the study area.

Fig. 5. Floodplain delineation.
5. Discussion
For this case study, the wettest period, 2014, was selected and the most extreme events were selected to observe the influence of LID adaptation on urban flooding. Many storm events of varying return periods could be examined but the inadequacy of rain gauge stations and meteorological records posed more difficulties. On the other hand, satellite-based model validation requires more real-time data. Ground-based model validation was not possible due to the inadequacy of the monitoring station. The distributed or parcel-scale rain barrel referred to as LID in this study area considered economic conditions of the residents. Retrofitting of other LID types is still a debated issue due to space consideration. Once sufficient storage is available, future studies should focus on other types of LID for groundwater recharge. The accuracy assessment of the built-up land cover of 83% (Table 2) predicts a less impervious area than what was accounted for in modeling, which is reasonable as not all rooftops provide potential for RWH. This study provides a guideline, after revision of the building code(HBRI,2015),considering 120 L per capita per day water demand, for accommodating about 2 million people. When rain barrels are adapted in each household,the flood reduction extent can be varied as the scale of modeling is changed.

Fig. 7. Subcatchment hydrograph after LID effect.

Table 7 Simulated runoff volume for June 2014.

Fig. 8. Floodplain delineation with LID effect.

Fig. 9. Flood reduction scenario.

Fig.10.Monthly RWH potential from unit rooftop area under various impervious conditions.
6. Conclusions
To observe the LID effect on urban flooding, this study attempted to establish an understanding of inundated area and depth in a selected urban area in Chittagong. As there is no stream gauging station in the study area,remote sensing-based model calibration can provide reasonable decision support to the concerned authority. Calibration was carried out on those models over a Landsat image and a reasonable correlation was obtained in this regard. Then, application of LID effects in SWMM showed that about 30% of the flooded area can be reduced. Moreover, the study showed that a 10%-60%impervious area of the subcatchment can yield a monthly RWH potential of 0.04-0.45 m3from a square meter of rooftop area.The sensitivity of hydraulic modeling results was influenced by DEM accuracy. This required a high-resolution DEM and adequate bathymetric survey for improved model performance.In this regard,highly accurate LiDAR,terrestrial laser scanner, and GPS observations can be recommended. In addition to these,a detailed study is needed based on historical precipitation data.
Declaration of competing interest
The authors declare no conflicts of interest.
 Water Science and Engineering2020年2期
Water Science and Engineering2020年2期
- Water Science and Engineering的其它文章
- Hydrological response to climate change and human activities:A case studyof Taihu Basin,China
- Toxic response of aquatic organisms to guide application of artemisinin sustained-release granule algaecide
- Effects of water application intensity of micro-sprinkler irrigation and soil salinity on environment of coastal saline soils
- Responses of river bed evolution to flow-sediment process changes after Three Gorges Project in middle Yangtze River: A case study of Yaojian reach
- PIV analysis and high-speed photographic observation of cavitating flow field behind circular multi-orifice plates
- Multi-objective reservoir operation using particle swarm optimization with adaptive random inertia weights