超流体陀螺灵敏度和分辨率研究
2020-08-14 01:48郑睿李方东赵传超
兵工学报 2020年7期
郑睿, 李方东, 赵传超
(1.安徽师范大学 物理与电子信息学院, 安徽 芜湖 241002; 2.东南大学 仪器科学与工程学院, 江苏 南京 210096;3.安徽省智能机器人信息融合与控制工程实验室, 安徽 芜湖 241002)
0 引言
基于物质波萨格纳克效应,超流体4He物质波干涉式陀螺仪(以下简称超流体陀螺)对旋转有极高的灵敏度,理论比光学陀螺仪的灵敏度高10个数量级[1]。与另一种主流的物质波干涉式陀螺——冷原子陀螺比较,超流体陀螺具有物质波产生简单、体积小、工作温度易实现、感应面积可增大等突出特点和技术优势[2-4],今后有望应用于宇航、深空探测、地震学测量、探测引力波等具有长期高精度要求的领域[5-8]。
灵敏度和分辨率是超流体陀螺的重要性能指标,二者之间互有关联,反映了陀螺的精度。灵敏度反映陀螺输出信号相对于输入信号(角速度)的变化率。文献[9]提出,由于超流体陀螺的工作曲线(描述了陀螺输入与输出关系的曲线)是非线性的,因此陀螺的灵敏度在不受控制情况下是变化的。但文献[9]仅开展了定性分析,陀螺灵敏度与其影响因素之间的定量关系尚不清楚。超流体陀螺在工作过程中,其工作点(工作曲线上的点)通常是被锁定的[4],这时陀螺的灵敏度将是恒定值。因此只有精确获得陀螺灵敏度的数学模型,才能把工作点锁定在最佳位置,确保陀螺在高灵敏度的状态下工作,使陀螺能分辨更小的角速度变化。
角速度引起超流体陀螺的输出变化,陀螺中的噪声同样也能引起输出变化,因此陀螺的分辨率(最小可以分辨的角速度变化)不仅与灵敏度相关,还与其噪声密切相关[10-12]。相关研究工作已探明了陀螺的噪声来源,分析了噪声类型,研究噪声的变化规律[13-14]。在此基础上,还需进一步分析噪声与分辨率之间的关系,并针对与陀螺分辨率相关的噪声开展深入研究。
基于超流体陀螺的工作机理,研究超流体陀螺灵敏度与其工作点之间的关系;推导超流体陀螺噪声方程,构建其分辨率的数学模型。通过对超流体陀螺灵敏度和分辨率间关联研究,确定陀螺的最佳工作点,并开展在最佳工作点时的陀螺灵敏度和分辨率分析,对于开发超流体陀螺高测量精度的潜力有重要意义。
1 超流体陀螺的灵敏度研究
超流体陀螺的结构和原理如图1所示,白色部分内充满4He超流体,“×”的位置是弱连接,由数千个孔径为几十纳米的微孔构成。图1(a)中,薄膜和弱连接之间的超流体构成内腔,其余部分超流体构成外腔,R1和R2为精密电阻。图1(b)表示超流体物质波干涉原理,超流体管路被等效为环形,Ω为角速度矢量,I1和I2为流过两个弱连接的超流体质量流量,I为环路中的总质量流量(干涉流量)。

图1 超流体陀螺结构和原理图Fig.1 Schematic diagrams of structure and principle of superfluid gyroscope
采用R1进行加热,使得内腔、外腔之间的温度和压力发生变化。内腔与外腔之间的温度差ΔT和压力差Δp共同产生化学势能差Δμ=m4(Δp/ρ-sΔT),其中m4为4He原子的质量,ρ为超流体密度,s为熵密度。在化学势能差作用下,超流体在弱连接处发生约瑟夫森效应,产生两路物质波I1和I2[10]:
I1=Ic1sin(2πfJt),
I2=Ic2sin(2πfJt+Δφe),
(1)
式中:Ic1和Ic2分别为I1和I2的最大值;Δφe为超流体相移;fJ为约瑟夫森频率;t为时间。在角速度矢量Ω和热相移的作用下,超流体相移Δφe[10]为
(2)
式中:Δφ1、Δφ2分别为两个弱连接两侧的相位差;Δφs为角速度矢量产生的萨格纳克相移,Δφh为由热阻R2加热产生的热相移;κ4=h/m4,h是普朗克常数;A为感应面积矢量,其方向是感应面积法线方向;Ω的方向为旋转轴的指向。A与Ω之间关系表示为
Ω·A=ΩAcosθ,
(3)
式中:A和Ω分别为矢量A和Ω的大小;θ为矢量A和Ω间的夹角。由图1(b)可知,I=I1+I2,因此干涉流量呈现正弦变化的规律,其幅值Im[10]为
(4)
式中:Ict=Ic1+Ic2;γ是双弱连接的非对称因子,γ=(Ic1-Ic2)/(Ic1+Ic2). 由Δφe和Im所决定的曲线被称为超流体陀螺的工作曲线,该曲线上的点即为陀螺工作点。
从超流体陀螺的工作原理可以看出,超流体陀螺敏感的输入量是超流体相移,输出为干涉流量的幅值,因此定义Im变化与Δφe变化之比超流体陀螺的灵敏度S,即
(5)
Im单位为kg/s,Δφe单位为rad,则(5)式中超流体陀螺的灵敏度单位为kg/(s·rad-1)。由(5)式可以看出,超流体陀螺的灵敏度不仅与其结构参数γ和Ict相关,还与Δφe相关,因此与其工作点的位置相关。
2 超流体陀螺的分辨率研究
在超流体陀螺灵敏度研究的基础上,进一步开展其分辨率的研究。
超流体陀螺的分辨率与其噪声有密切相关的联系。一般情况下,可认为噪声决定了陀螺的分辨率[12-13]。超流体陀螺噪声类型主要有:由热能量引起的热噪声、由超流体温度变化引起的温度波动噪声,由化学势能差变化引起的约瑟夫森频率波动噪声、由测量薄膜位移装置引起的检测元件噪声等组成。由于检测元件噪声的数量级要高于其他类型的噪声,是最为主要的[11],因此超流体陀螺的分辨率主要由检测元件噪声所决定。
超流体陀螺是超高精度的新型惯性传感器,其极限测量能力同样受到关注。在上述噪声中,由于热噪声是由热能量引起,它是一直存在、不可消除的[15],因此它决定了超流体陀螺的极限分辨率。
以下分别推导超流体陀螺的检测元件噪声和热噪声方程,从而构建其分辨率以及极限分辨率的数学模型。
2.1 超流体陀螺分辨率的数学模型
超流体流过弱连接引起薄膜位移变化,通过高精度的位移检测系统测量薄膜位移,这样就可以监测到超流体流量。超流体陀螺薄膜腔体的示意如图2所示。
图2 超流体陀螺薄膜腔体示意图Fig.2 Schematic diagram of membrane chamber in superfluid gyroscope
在图2中,双弱连接被等效为一个小孔。由图2可知,超流体通过小孔会引起薄膜偏离其初始位置,引起腔体内流体体积V变化。因此,V的变化与薄膜位移x的变化是呈正比的:
(6)
式中:Ad为薄膜的表面积。由(5)式和(6)式可知,薄膜位移与总流量的积分呈正比,因此有
(7)
由(7)式可知,超流性成分的约瑟夫森效应引起了薄膜发生周期为fJ的振荡,其振荡的幅值xm为
(8)
设位移检测系统在测量薄膜位移时产生了δxmn的噪声,由(4)式和(8)式可知,角速度测量值Ωd与xm之间呈现非线性函数关系。根据非线性随机变量的方差求解方法[16],位移检测系统噪声引起Ωd波动的噪声Ωdn为
(9)
检测元件噪声决定了超流体陀螺的分辨率,因此由(5)式和(9)式可得,超流体陀螺的分辨率δΩmin为
(10)
2.2 超流体陀螺极限分辨率的数学模型
随着技术的发展,温度波动噪声、约瑟夫森频率波动噪声、检测元件噪声等都还有进一步减小趋势和可能性。但受到超流体陀螺工作温度范围的限制,热能量被限制在一定的范围内,不可能无限减小。如果由于上述噪声源足够小,使得热噪声的数量级最高,那么陀螺噪声将由热噪声所决定。因此热噪声决定了超流体陀螺的极限分辨率。
在单一微孔情况下,超流体的动能EJ和热能量ET[10]可以分别表示为
(11)
式中:ρs为超流体中超流性成分的密度;a为微孔孔径;τ为微孔连接的厚度;vs为超流体的流速;KB为玻尔兹曼常数;T是当前温度。
由于超流体流速vs与弱连接两侧相位差Δφ的关系[17]为
(12)
把超流体的热能量折算为其动能,令ET=EJ,并结合(12)式可得由热能量引起的相位波动为
(13)
(14)
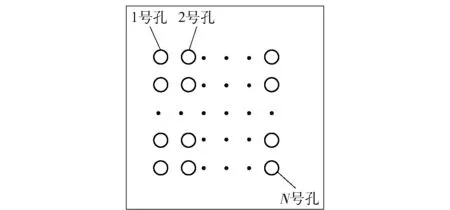
图3 弱连接处微孔阵列的示意图Fig.3 Schematic diagram of aperture arrays at the weak link
由(2)式可知,当热相移Δφn=0时,Δφs=Δφ1-Δφ2,所以Δφs是随机变量。双弱连接在位置上相互独立,因此Δφ1和Δφ2相互独立,其标准偏差由(14)式决定。那么,热能量引起Δφs波动的噪声Δφsn为
试验结果表明:新品种科河699和大民3307在正常栽培条件下,产量高于常规品种先玉335。抗病性和适应性强,产量高,适宜于民勤县种植,建议今后在民勤县沙漠灌溉区大面积推广种植。
(15)
由(2)式可知,当热相移Δφn=0时,Ωd与Δφs之间呈现线性的函数关系,那么热能量引起Ωd波动的噪声ΩdTn为
(16)
(16)式描述了热噪声与其影响因素之间的关系。因此超流体陀螺的极限分辨率δΩmin,l为
δΩmin,l=ΩdTn.
(17)
(17)式描述了超流体陀螺的极限分辨率与其影响因素之间的关系,是其极限分辨率的数学模型。由(16)式和(17)式可知,超流体陀螺的极限分辨率只与其结构参数和工作温度有关。
3 半物理仿真实验与分析
在理论研究的基础上,利用超流体陀螺半物理仿真实验平台,开展超流体陀螺的灵敏度和分辨率的分析。
3.1 超流体陀螺半物理仿真实验平台
超流体陀螺半物理仿真实验平台的结构如图4所示。在该平台中,基于大量的实测数据,模拟超流体干涉仪的工作过程,包括热驱动模块、热相移输入模块、角速度敏感模块和薄膜位移产生模块4个部分。超流体陀螺的相移控制系统则由硬件实现,包括角速度信息提取模块、高精度反馈热相移处理电路和热相移控制电路3个部分。平台中各部分之间的关联如图4中箭头指向所示。

图4 超流体陀螺仿真实验平台结构框图Fig.4 Structure block diagram of superfluid gyroscope simulation experimental platform
3.2 工作曲线的周期内灵敏度和分辨率分析
由(5)式和(9)式可知,超流体陀螺的灵敏度和分辨率与其工作点的位置相关。而超流体陀螺工作过程中,其工作点是要被实时锁定的,因此,在实验平台中通过相移控制系统,取超流体陀螺工作曲线的一个周期,在该范围内开展灵敏度和分辨率分析,获取灵敏度和分辨率的变化规律,并确定陀螺的最佳工作点。
实验平台中的基本参数设置[10]为:
1) 结构参数:面积矢量大小A=5×10-4m2, 角速度矢量与面积矢量的夹角θ=0 rad,弱连接处的微孔数量N=5 625, 微孔孔径a=10-7m,微孔连接的厚度τ=8×10-9m,双弱连接非对称因子γ=0.3,薄膜面积Ad=5×10-5m2,Ict=1.1×10-11kg/s(Ict与微孔阵列参数相关,属于结构参数)。
2) 工作参数:工作温度T=2.167 K, 约瑟夫森频率fJ=700 Hz.
4) 工作曲线:超流体陀螺的工作曲线周期性变化,因此只取工作曲线的一个周期开展研究,即设置超流体相移Δφe的变化范围是0 ~2π rad.
根据设置的参数可得,工作曲线周期内超流体陀螺的灵敏度和分辨率如图5所示。

图5 工作点变化范围内灵敏度和分辨率曲线Fig.5 Curves of sensitivity and resolution in the changing range of working point
由图5可知,当超流体相移由0 rad变化到2πrad,超流体陀螺工作曲线经历了一个周期。在此期间,超流体陀螺的灵敏度呈现先增大、再减小,随后又增大、再次减小的变化规律。由于超流体陀螺的分辨率与其灵敏度呈反比,因此其分辨率呈现先减小、再增大,随后又减小、再次增大的变化规律。而超流体陀螺的极限分辨率与其灵敏度无关,始终保持恒定。

由图5可以分析出,当超流体相移为2.1 rad和4.1 rad时,超流体陀螺灵敏度达到最大值,此时超流体陀螺可分辨最小的角速度变化。因此根据本文的通用参数,超流体相移为2.1 rad和4.1 rad是陀螺的最佳工作点。
3.3 被锁定在最佳工作点时灵敏度和分辨率分析
利用仿真实验平台中的相移控制系统,把超流体陀螺的工作点锁定在Δφe=2.1 rad的最佳工作点,其他参数同3.2节的设置,此时超流体陀螺工作点的锁定值及工作点的变化范围如图6所示。

图6 工作点的锁定值及变化范围曲线Fig.6 Locking value and varying range of working point

3.4 角速度输入情况下超流体陀螺的灵敏度分析
为进一步验证超流体陀螺的分辨率,在两类典型的角速度情况下,研究超流体陀螺的噪声大小。研究参数同3.2节中的设置,并且把超流体陀螺的工作点锁定在最佳工作点。输入角速度设置为两种典型类型:第1种是恒定角速度,Ω=2×10-6rad/s;第2种是正弦输入角速度,Ω=2×10-6sin(2πt)rad/s. 角速度输入的时间为1 s.
根据仿真实验平台中超流体陀螺的工作过程,可得输入角速度恒定时的角速度测量值、角速度测量值误差分别如图7、图8所示。输入角速度正弦变化时的角速度测量值、角速度测量值误差分别如图9和图10所示。
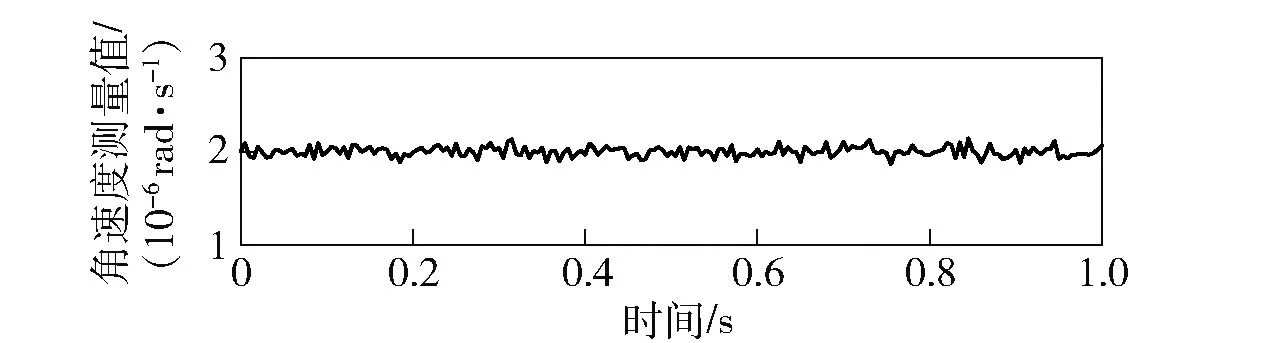
图7 角速度测量值(输入角速度恒定)Fig.7 Measured value of angular velocity (constant input angular velocity)
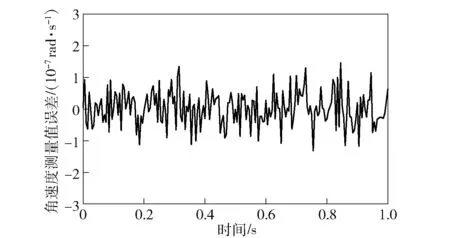
图8 角速度测量值的误差(输入角速度恒定)Fig.8 Error of measured value of angular velocity (constant input angular velocity)
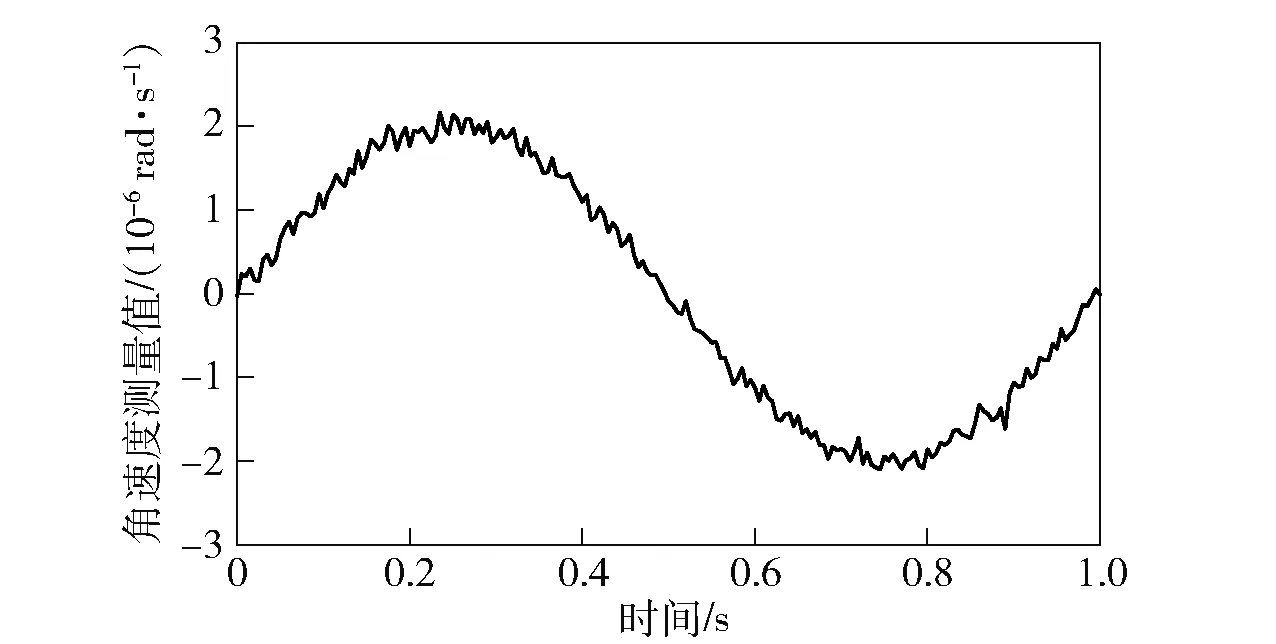
图9 角速度测量值(输入角速度正弦变化)Fig.9 Measured value of angular velocity (sinusoidal input angular velocity)
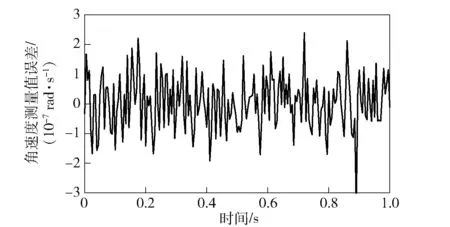
图10 角速度测量值的误差(输入角速度正弦变化)Fig.10 Rrror of measured value of angular velocity (sinusoidal input angular velocity)


4 结论
为研究新型超流体陀螺的灵敏度和分辨率,本文在分析其灵敏度与工作曲线之间关系的基础上,对陀螺的噪声进行分析,构建其分辨率的数学模型。得出以下主要结论:
1) 超流体陀螺灵敏度与其工作点的位置相关,其分辨率由检测元件噪声所决定,其极限分辨率由热噪声所决定。
2) 在工作曲线的周期内,超流体陀螺灵敏度和分辨率呈现周期性的变化,其极限分辨率保持恒定。

猜你喜欢
矿业安全与环保(2022年2期)2022-05-20
北京航空航天大学学报(2021年4期)2021-11-24
汽车与驾驶维修(维修版)(2021年10期)2021-11-05
汽车与驾驶维修(维修版)(2021年10期)2021-11-05
小学生学习指导(低年级)(2019年10期)2019-10-16
学生天地(2019年6期)2019-03-07
中学课程辅导·教师通讯(2018年10期)2018-09-04
中学生数理化·高一版(2017年3期)2017-07-08
故事作文·高年级(2016年6期)2016-06-21
中国实用医药(2016年2期)2016-01-05