基于运行速度的高速公路线形安全评价
2020-08-12 11:53张磊
山西建筑 2020年16期
张 磊
(山西省交通规划勘察设计院有限公司,山西 太原 030032)
在进行公路路线设计时,通常以设计速度为依据,结合沿线的地形地貌,按照相关规范合理选择设计参数,尽量满足安全、快速、舒适、经济、环保的设计理念[1,2]。
设计速度是确定公路设计指标的基准速度,一经选定,公路所有相关设计指标均与其配合以获得均衡设计;运行速度是指在路面平整、潮湿,自由流状态下,行驶速度累计分布曲线上对应于85%分位值的速度[3]。现实生活中,车辆总是随着公路线形、车辆性能和驾驶员等不同条件发生变化的,有时会采用较高的速度行驶,从而造成了设计速度指标不能满足实际运行速度指标的情况。
公路项目安全性评价是从公路使用者行车安全的角度对公路设施的规划、研究、设计成果或现有公路路况影响行车安全的潜在因素进行评价。
1 路线设计安全评价基本要求
1.1 设计符合性检验
在进行公路设计时,必须根据现行标准、规范的基本要求进行路线的平面、纵断面、超高及加宽的设计,设计完毕后需对采用的设计指标进行正确性检验,指出不符合标准、规范的技术指标,进行重新设计和检验。
1.2 运行速度协调性评价
公路路线设计的安全评价通常采用设计速度v和运行速度v85分别进行路线设计指标的验证和评价。
运行速度协调性作为线形一致性的评价指标,其采用相邻路段运行速度差值的绝对值|Δv85|及运行速度梯度的绝对值|ΔIv|进行评价[4],高速公路评价标准见表1。
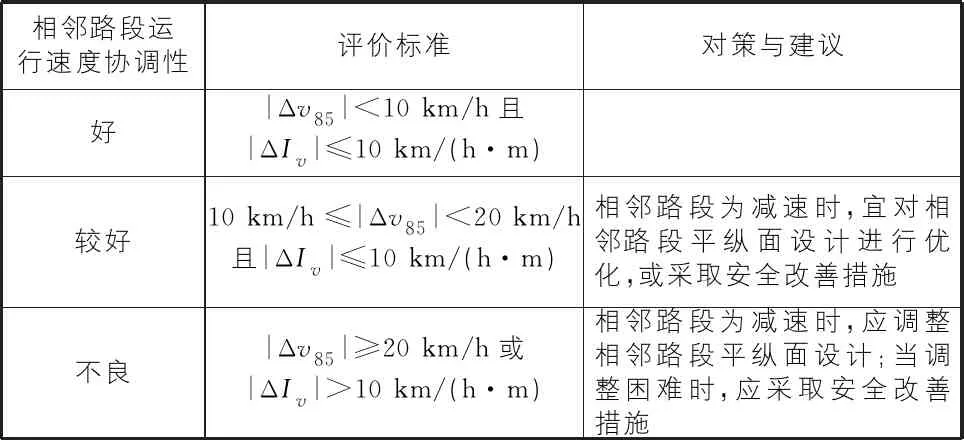
表1 相邻路段运行速度协调性评价标准
1.3 平面线形评价
1.3.1圆曲线半径
当采用运行速度对圆曲线半径进行评价时,应按照运行速度v85计算该路段运行速度所要求的圆曲线半径,将该半径与设计圆曲线半径进行比较,核查该路段设计圆曲线半径是否满足运行速度下所需的圆曲线半径,计算公式如下:
(1)
其中,R为路段运行速度要求的圆曲线半径,m;v85为运行速度,km/h;μ为横向力系数;i为路拱横坡。
1.3.2平曲线最小长度
平曲线由圆曲线和缓和曲线组合。当车辆在平曲线上运行时,过短的曲线长度容易致使驾驶员操作频繁而造成紧张情绪,在行驶过程中容易引发交通事故。因此,平曲线的最小长度也应满足规范中的要求。
1.3.3最小直线长度
为保证路线线形的连续性,圆曲线间的直线长度不宜过短。若同向曲线间插入的直线段太短,则形成“断臂”曲线,这种线形容易使人产生路线反向弯曲的错觉,导致驾驶员判断错误而引发交通事故;若反向曲线之间的直线段过短,不能足够长的超高、加宽缓和段,造成路线不能连续且平稳地过渡。因此,要以路段的运行速度对最小直线长度进行检验,并提出合理的改进措施。
1.4 纵断面线形评价
路线纵断面线形要素主要包括坡度、坡长、竖曲线半径等,这些参数都与车辆的运行速度及运输的经济性、安全性密切相关。
纵断面设计时,设计坡长及最大纵坡均应满足规范要求;若连续采用大于3%的纵坡时,组合坡长也应不大于规范规定的最大值。在进行路线设计时尽量选择纵坡平缓的线形方案和指标。在安全性评价中,应采用运行速度计算值对路段坡度、坡长等进行评价。
1.5 视距
视距是指从驾驶员看到前方障碍物起,到车辆在障碍物前停下来的最短距离,充分的视距是驾驶员安全驾驶的前提。JTG D20—2017公路路线设计规范[5]中规定高速公路、一级公路的视距应采用停车视距,且均应满足规范要求。
2 工程概况
本文以某山区高速公路为例,对其进行安全评价。该高速公路全长约36.6 km,主线采用双向四车道,设计速度80 km/h,路基宽度25.5 m,分离式路基宽度为12.75 m,路线主要技术指标见表2。

表2 主要技术指标表
3 安全性评价检验
3.1 运行速度检验
在路线设计完成,确定构造物后,根据JTG B05—2015公路项目安全性评价规范运行速度计算方法中的规定,将该项目划分为若干个分析单元,并按照规范附录B中推荐的运行速度预测模型进行预测。预测该项目的运行速度如图1,图2所示。
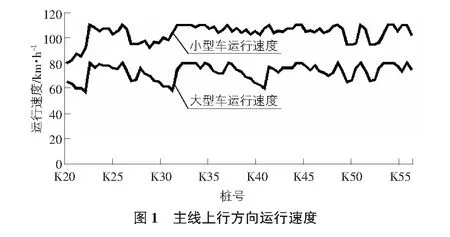

经检查,主线上行方向小型车的最小运行速度为80 km/h,最大运行速度为110 km/h,运行速度差最大为18.5 km/h,全线上行小型车运行速度梯度最大为-6.1 km/(h·m);大型车的最小运行速度为56.9 km/h,最大运行速度80 km/h,运行速度差最大为23.1 km/h,全线上行大型车运行速度梯度最大为9.4 km/(h·m)。
主线下行方向小型车的最小运行速度为72 km/h,最大运行速度为110 km/h,运行速度差最大为30 km/h,全线下行小型车运行速度梯度最大为-6.1 km/(h·m);大型车的最小运行速度为59.6 km/h,最大运行速度80 km/h,运行速度差最大为20.7 km/h,全线下行大型车运行速度梯度最大为11.6 km/(h·m)。
根据运行速度预测结果,该项目主线上行方向存在3处、下行方向存在2处相邻路段运行速度协调性评价为较好的路段,且这5处均位于隧道入口路段,建议在隧道前设置限速标志,并在隧道进出口段铺设彩色防滑路面或增设减速标线,以满足行车安全的要求。
3.2 平面线形评价检验
3.2.1圆曲线半径
安全评价规范规定,式(1)中横向力系数μ值的大小既要考虑路面与轮胎之间的摩擦系数,还要考虑驾乘人员的承受能力和舒适感。综合平衡二者后,列出了不同运行速度与横向力系数的关系,高等级公路如表3所示。

表3 运行速度与横向力系数关系表
根据运行速度预测结果,本路段最大运行速度为110 km/h,最小横坡值为2%,根据表3取μ值为0.11,按照式(1)可求得运行速度最大、横坡值最小情况下所需的圆曲线半径临界值为732.89 m,则需对主线圆曲线半径设计值小于732.89 m的路段进行核查,结果如表4所示。

表4 运行速度圆曲线半径核查结果
由表4可知,该项目主线圆曲线半径设计值均满足运行速度的要求。
3.2.2平曲线最小长度
该项目平曲线最小长度为411.695 m,大于规范中80 km/h设计速度对应平曲线最小长度的一般值为400 m,设计指标均满足规范对设计速度的要求;根据运行速度预测结果,该项目最大运行速度为110 km/h,对应规范中平曲线最小长度的最小值为185 m,一般值为550 m,本项目设计指标满足运行速度下平曲线最小长度最小值的要求。
3.2.3最小直线长度
经核查,最小直线长度均能满足规范中对应80 km/h设计速度下的要求。当采用运行速度核查时,上下行方向各存在2处同向曲线间长度不满足运行速度要求、2处反向曲线间长度不满足运行速度要求,如表5所示。
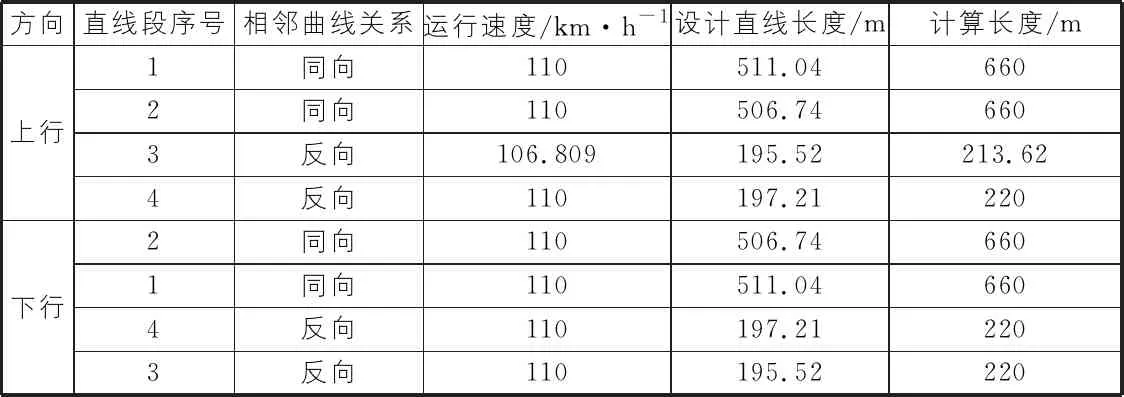
表5 最小直线长度不满足运行速度要求路段
3.3 纵断面线形评价检验
从表2中可以看出,该项目的竖曲线半径均满足规范中80 km/h设计速度对应的凸形竖曲线半径一般值4 500 m和凹形竖曲线半径一般值3 000 m的要求。
根据运行速度预测结果,该项目最大运行速度为110 km/h,对应规范中凸形竖曲线半径一般值和极限值分别为13 500 m和8 750 m,凹形竖曲线半径一般值和极限值分别为5 250 m和3 500 m,本项目设计指标满足运行速度下竖曲线半径值的要求。
该项目纵断面最大纵坡为4%,根据路线规范要求,80 km/h的设计速度对应最大纵坡为6%,110 km/h的设计速度对应最大纵坡为3.5%,经核查,共存在6处不满足运行速度下最大纵坡要求的路段,建议在这些路段上采取合理的限速措施,从而保障行车安全。
由于规范选择坡度大于3%的路段进行运行速度下的坡长检查,结果见表6,共存在2处纵坡设计坡长大于运行速度对应的最大坡长。
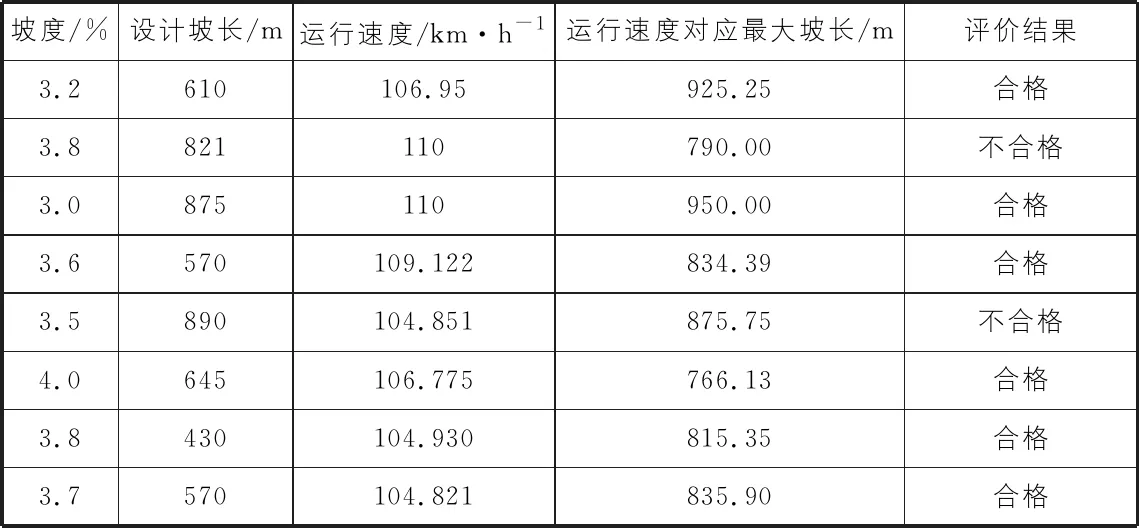
表6 运行速度下最大坡长检验
3.4 视距
视距是保证公路安全的一项重要设计指标。横净距是指行车轨迹线与视距曲线之间的距离。不同圆曲线半径所需要的横净距按式(2)进行计算:
(2)
其中,m为所需横净距,m;R为车道中线处的曲线半径,m;S为小型车或大型车相应的视距,m。
3.4.1路堑右转平曲线视距检验
该项目主线挖方路段的边坡坡率为1∶0.75,小型车和大型车的视高分别取1.2 m和2.0 m,驾驶员位置离最右侧行车道中心线的距离分别取0.3 m和0.5 m,则可计算得出路堑右转平曲线能够提供给小型车和大型车的横净距分别为8.925 m和9.725 m。
该项目设计最大纵坡为4%,最小圆曲线半径为640 m,预测运行速度小型车最高为110 km/h,大型车最高为80 km/h,按照式(2)计算,最小圆曲线半径下,满足设计速度80 km/h下小型车停车视距110 m和大型车停车视距125 m的要求,所需横净距分别为2.36 m和3.05 m;满足运行速度110 km/h下小型车停车视距185 m的要求,所需的横净距为6.67 m;因而,路堑右转平曲线所提供的横净距能够满足设计速度和运行速度的右转视距要求。
3.4.2左转平曲线视距检验
该项目为高速公路,中间设中央分隔带,当内侧车道行驶的小型车辆左转时,由于中央分隔带护栏或防眩设施遮挡会引起视距不良的问题,本项目中中央分隔带能够为小型车提供的横净距为2.375 m。
在此横净距条件下,按照式(2)计算,满足设计速度80 km/h下小型车停车视距110 m要求的最小圆曲线半径为635 m,经核查,圆曲线设计半径均能满足要求;满足运行速度110 km/h下停车视距185 m要求的最小圆曲线半径为1 800 m,经核查,该项目最大圆曲线半径为1 500 m,所有圆曲线半径不能满足运行速度下左转平曲线视距的要求。
4 结语
本文将采用运行速度的相关理论对某高速公路项目进行了安全评价,检验结果表明:该项目运行速度协调性较好;平、纵面设计参数能满足其设计速度的要求;而当小型车的运行速度达到110 km/h时,上下行方向各存在2处同向曲线间长度、2处反向曲线间长度不满足运行速度要求,存在6处路段不满足运行速度的最大纵坡要求、2处纵坡设计坡长大于运行速度对应的最大坡长,同时圆曲线设计半径均不能满足运行速度下左转平曲线视距的要求。因此,建议采用设置减速标志、拓宽平曲线弯道外侧等方式提高该路段的运行安全。
猜你喜欢
中国交通信息化(2022年7期)2022-10-27
北京交通大学学报(2021年4期)2021-09-26
中国计算机报(2020年9期)2020-03-25
建材发展导向(2019年11期)2019-08-24
智富时代(2018年5期)2018-07-18
智富时代(2018年5期)2018-07-18
北京航空航天大学学报(2017年7期)2017-11-24
汽车与安全(2017年9期)2017-09-29
居业(2017年5期)2017-07-24
汽车与新动力(2015年1期)2015-02-27