基于测量机器人的面板堆石坝表面变形自动化监测技术应用★
2020-08-12 10:53:46朱光平
山西建筑 2020年16期
朱光平 陈 刚 高 全 李 麒
(1.重庆市开州区水务局,重庆 405400; 2.国电竹溪水电开发有限公司,湖北 十堰 442000; 3.长江勘测规划设计研究有限责任公司,湖北 武汉 430010; 4.国家大坝安全工程技术研究中心,湖北 武汉 430010)
1 概述
某水电站枢纽工程位于湖北省郧西县夹河镇境内的汉江支流金钱河上,距十堰市区120 km,坝址以上控制流域面积5 611 km2,总库容5.84亿m3,是以发电为主,兼有灌溉、防洪等综合效益的大(2)型工程。枢纽工程由混凝土面板砂砾石堆石坝、溢洪道、泄洪(排沙)洞、发电引水洞、发电厂房、开关站等组成。大坝为混凝土面板砂砾石堆石坝,最大坝高88.5 m,坝顶高程275.0 m,坝顶宽度8.0 m,坝顶长度342.2 m,上游坝坡1∶1.5,下游坝坡设有三级2.0 m宽马道,马道间坡比1∶1.3。
为监测大坝表面变形,大坝布设有可兼测水平位移和垂直位移的综合位移标点共33个,包括上游面板269.0 m高程处4个测点、坝顶11个测点和坝下253.0 m高程8个测点、232.0 m高程6个测点、马道208.0 m高程4个测点。水平位移采用视准线法观测,垂直位移采用几何水准法观测,观测劳动强度大、效率低,不适应工程“无人值班、少人值守”发展需要,难以满足电站现代化、信息化管理要求。通过布设测量机器人系统,进行堆石坝表面变形自动监测,并进行监测成果精度分析,满足规范要求。
2 测量机器人系统设计
测量机器人(measurement robot)是一种能代替人进行自动搜索、跟踪、辨识和精确照准目标并获取角度、距离、三维坐标以及影像等信息的智能型电子全站仪[1]。它是在全站仪的基础上集成激光、精密机械、微型计算机、CCD传感器以及人工智能技术发展起来的,能在计算机控制下,实现目标的自动识别,精确照准和测量数据的自动记录,并可实现对大量目标的无接触自动遥测,且不受白天黑夜影响。徕卡测量机器人是当今世界上精度最高的全站仪(测角精度0.5″,测距精度1 mm+1 ppm)。
2.1 系统设计原则与要求
水电站大坝表面变形监测自动化系统改造,以布设测量机器人系统为核心,以实现堆石坝表面变形全自动化监测为目标,提高大坝管理水平,为水电站运行管理提供强有力的技术支持和保障。系统设计应满足如下原则与要求[2-4]:
1)测点布置应统一规划、突出重点、兼顾一般,并充分利用水电站大坝现有监测设施,能够比较全面地反映大坝的变形工作状态。2)技术方案应较为成熟、可靠,仪器设备应精确可靠、稳定耐久、经济实用,满足用户的技术要求,可实现自动化监测,并体现先进性。3)系统结构体现设计简洁、实用、操作简便和低成本运行的概念,建立可靠性高,能够满足将来需求增长的系统。4)完全立足于现有通讯技术的利用,统一标准、统一管理,提高效率。
2.2 测量机器人系统布置
测量机器人系统布置包括大坝表面变形综合位移标点改造,测量机器人基点站房及配套系统布设,大坝表面变形控制网建设以及测量机器人自动监测系统集成。
测量机器人硬件系统由基站、基准点、监测点、计算机、安防系统组成,见图1。基站由观测墩、测量机器人、观测房组成,测量机器人架设于基点上,为坐标原点。本工程共布设2台测量机器人,布置在左右稳定坝肩上,基础稳定,通视条件良好。一系列基准点组成控制网,基准点应位于变形区以外的稳固处,有观测墩和棱镜,为系统数据处理时的距离及高差差分计算提供基准。监测点布置在变形体表面,反映监测目标的变形状态。监测点由观测墩、正对基站的棱镜、数字式温度计和气压计组成,监测点根据工程实际和规范要求,较均匀地布设于变形体有代表性的横纵断面上。计算机监测软件通过通讯电缆控制测量机器人作全自动变形监测,并进行数据传输和处理。
2.3 系统精度及功能要求
1)精度要求。测量机器人仪器标称精度应满足测角精度1″,测距精度(1+1 ppm)mm。根据规范要求,大坝表面变形监测点,其垂直位移与水平位移监测精度相对于临近工作基点应不大于±3 mm[5]。大坝水平位移采用极坐标法观测,其监测精度及限差应满足表1要求。


表1 极坐标法监测及限差
2)功能要求。a.系统能实现从测量照准、数据采集记录、数据预处理到测量手簿生成、常用平差软件所需格式文件的输出全部过程自动化,可在无人值守的情况下不间断定时观测。自动测量过程要易于控制,可以进行随时暂停、继续、退出控制。b.适用传统作业习惯,测量可以采用全圆方向观测,也可以分组观测,同时可以根据现行国家规范进行各种测量限差的设置,测量过程中软件自动进行各项指标的检查。具有三角形闭合差计算功能,及时发现三角形闭合差是否超限,以达到及时检查作业质量的目的。c.系统采用远离全站仪监测站的计算机中心控制机房监控方式,值班人员在控制机房可全面了解监测系统的运行情况。控制机房和监测站的全站仪之间采用双向有线通讯方式,实现控制计算机对全站仪的远距离在线控制。d.系统可自动生成EXCEL文档格式表格的外业观测手簿,具有图形显示和输出功能,用户可以实时查看数据,可以看到数据分析的结果及图形化显示,并对限差进行检核、数据计算、预警、分析。
3 测量机器人系统实施
3.1 控制网建立
监测坐标系统应与原有控制网坐标系统保持一致[6],本控制网结合水电站现有控制网点DK06和DK07进行控制网布置。通过外业实测和内业对比分析DK06-DK07边长,控制点DK06,DK07坐标值存在一定的偏差。考虑到控制点成果较为久远,点位存在偏移,本项目控制网测量平差采用策略为:以较为稳定的山顶岩石控制点(DK06)的坐标为起算点,DK06-DK07原方向值(347°41′33.51″)作为方向值,坝顶设计高程(275 m)作为投影高,按一点一方向进行平差,求取控制网点的坐标值。本工程控制网以2个已知控制点DK06和DK07作后视点,与工作基点(TN01,TN02)以及工作基点墩身埋设的检核点(TPG1,TPG2)共6个点组成本监测系统的控制网,如图2所示。
3.2 方案实施
测量机器人按照设计要求对棱镜目标点进行自动观测,同时采用徕卡温度及压力传感器自动实时采集测量点的温度和压力数据,通过光纤将监测点的坐标、温度和压力数据实时传输到数据中心,该子系统主要由监测机器人、棱镜、温度及压力传感器组成。测量机器人子系统包括2台TM50全站仪和37个观测点圆棱镜,其中监测点33个,基准点4个,工作基点2个。观测房采用三级防雷措施,房顶布置防雷导网,房内安装空开及防浪涌保护器,并采纳防雷排插进行设备供电。

数据通讯采用GPRS无线通讯方式,对仪器进行配置,并控制仪器的测量,管理整个系统的运行,接收测量机器人观测成果,依据温度及压力传感器测得数据,自动对监测机器人的测量成果进行自动气象修正,并对监测机器人的测量数据进行计算、分析,根据预设限差自动发送报警信息。
在水电站管理房内设立安全监测工作站,布设服务器等硬件系统和自动化控制软件(GeoMoS)等系统,作为自动化监测系统的数据控制中心。数据中心通过GPRS网络与现场设备进行连接、传输与控制,从而实现表面变形自动化监测。
4 测量机器人系统首次测量及成果分析
自动化监测系统正式投入使用前进行控制网联测以确定各基点、工作基点及监测点的初始坐标值[7],为测量机器人系统自动化监测奠定基础。根据相关规范要求,安全监测自动化改造时,应保持观测成果的连续性,测量机器人坐标系统应与原监测坐标系统保持一致。
4.1 外业观测
首先,对本监测系统的控制网进行外业观测,平面采用边角网方式,按二等边角网方式施测,角度测量采用方向观测法实施,方向观测法限差见表2。高程采用三角高程法往返对向观测,进行水平位移监测控制网边长倾斜改正时,垂直观测限差见表3。
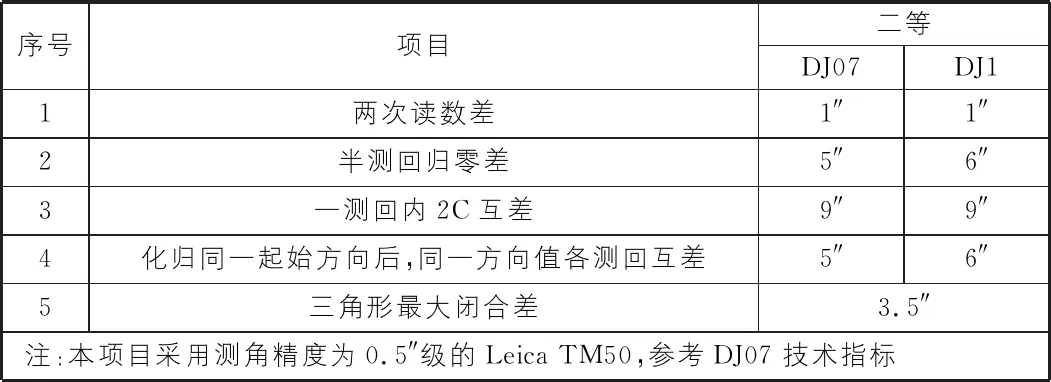
表2 方向观测法限差表

表3 垂直观测限差表
外业观测时间为2018年11月30日~2018年12月1日,采用1台TM30全站仪按上述要求进行施测,经检查,外业观测数据符合要求。
4.2 数据处理
1)测点平面及高程平差。除墩身备用后视点TPG1,TPG2外,其他控制网点均采用往返测量方式实施,以DK06高程作为已知值,DK07高程作为检核点,进行平差,精度统计如表4所示。

表4 控制网平面及高程精度统计表
其中,平面最弱点点位中误差为±2.32 mm,最弱边边长中误差为1/303 913,满足二等技术要求;垂直最弱点点位中误差为±1.13 mm,满足二等水准测量要求。
2)控制网成果表。平差后,控制网成果如表5所示。按同样平差策略进行检核平差计算,对比分析,Δx,Δy,Δh平差差值均不超过±1.0 mm,平差结果精度稳定可靠。

表5 控制网成果表及检验平差计算
4.3 监测成果
2018年12月15日,进行大坝表面变形自动化监测,监测成果初始值如表6所示。

表6 大坝表面变形自动化监测成果初始值
综上分析,测点平面最弱点点位中误差为±2.32 mm,垂直最弱点点位中误差为±1.13 mm,满足二等测量要求。平差检核,Δx,Δy,Δh平差差值均不超过±1.0 mm,控制网平差结果精度稳定可靠。结合观测成果分析,测值变化平缓,无缺测和测值明显突变情况,中误差在±3.0 mm以内,满足规范要求,规律性明显,符合一般规律,能反映大坝变形性态,满足大坝安全管理需要。
5 结语
本文对测量机器人在面板堆石坝表面变形监测中应用展开研究,介绍了测量机器人系统设计原则与要求、测量机器人系统布置方法、系统精度及功能要求,结合具体工程进行实施应用,包括控制建立和系统实施,并对测量成果控制网平面及高程精度分析,测量精度满足规范要求,成功获取测量机器人自动化观测成果初始值,实现了堆石坝表面变形自动化监测。应用表明,测量机器人在面板堆石坝表面变形监测中具有精度高、实时、动态、全天候、智能远程遥测的优点,可以减少人力资源,快速完成大坝表面变形监测工作,实现真正意义上的无人值守连续运行的高精度自动形变监测,应用前景广阔。
猜你喜欢
煤气与热力(2022年4期)2022-05-23 12:44:56
水利水电科技进展(2021年6期)2022-01-07 02:58:02
当代陕西(2020年23期)2021-01-07 09:24:44
水电站设计(2020年4期)2020-07-16 08:23:48
百科知识(2018年6期)2018-04-03 15:43:54
石家庄铁路职业技术学院学报(2017年4期)2017-05-25 13:26:41
少儿科学周刊·儿童版(2016年4期)2017-02-08 13:49:11
少儿科学周刊·儿童版(2016年4期)2017-02-08 13:48:12
湖南畜牧兽医(2016年3期)2016-06-05 08:37:55
全球定位系统(2015年4期)2015-02-28 12:38:13