
Fault-tolerant control and vibration suppression of flexible spacecraft: An interconnected system approach
2020-08-11 04:17QianLIHaoYANGDongZHAOBinJIANG
CHINESE JOURNAL OF AERONAUTICS 2020年7期
Qian LI, Hao YANG, Dong ZHAO, Bin JIANG
College of Automation Engineering, Nanjing University of Aeronautics and Astronautics, Nanjing 211106, China
KEYWORDS Cycle-small-gain theorem;Decentralized fault-tolerant control;Distributed fault-tolerant control;Flexible spacecraft;Interconnected system
Abstract This paper considers a fault-tolerant control and vibration suppression problem of flexible spacecraft. The attitude dynamics is modeled by an interconnected system, in which the rigid part and the flexible part are coupled with each other. Such a model allows us to use the interconnected system approach to analyze the flexible spacecraft. Both distributed and decentralized observer-based fault-tolerant control schemes are developed, under which the closed-loop stability of flexible spacecraft can be ensured by using the cycle-small-gain theorem.Compared with the traditional method,this paper considers the faults occurred not only in the rigid parts,but also in the flexible parts.In addition,the application of the interconnected system approach simplifies the system model of flexible spacecraft,thereby the difficulty of theoretical analysis and engineering practice of fault-tolerant control of flexible spacecraft are greatly reduced. Simulation results show the effectiveness of the proposed methods and the comparison of different fault-tolerant control approach.
1. Introduction
Spacecraft with the capability of attitude control is required for accomplishing modern space missions, and such a control problem has been concerned by many domestic and foreign researchers.1Compared with rigid spacecraft, flexible ones need higher requirements on the reliability and accuracy of each component,since they can perform many special tasks.2,3The failure of each link in the system may completely change system behaviors, and result in system performance degradation, even unstable. Therefore, compensating for such faults is significant for modern flexible spacecraft, which essentially requires effective fault-tolerant control schemes
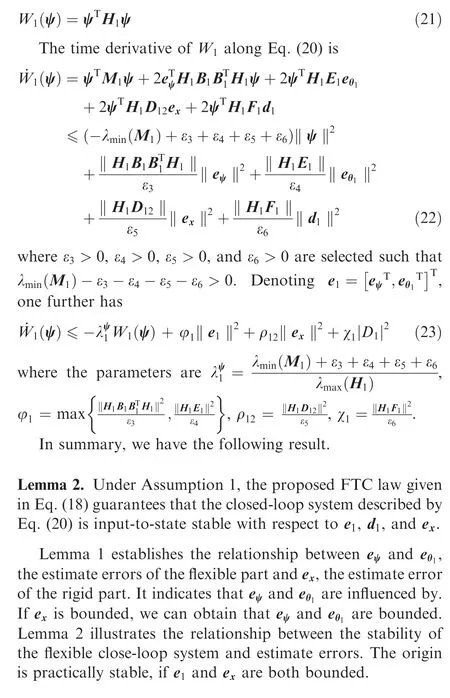
Fault-Tolerant Control(FTC)aims at guaranteeing the goal of the system to be achieved in spite of faults.4-6Many FTC problems have been studied for different applications,7-10and various FTC algorithms were developed in Refs.11-17As for the application of flexible spacecraft,an adaptive fault compensation scheme was developed for flexible spacecraft to not only deal with uncertainties caused by actuator faults,disturbances and parameters but also ensure the attitude and angular velocity tracking property.18Sliding mode fault-tolerant attitude control strategies were proposed for flexible spacecraft to deal with loss of actuator effectiveness and actuator saturation,respectively.19,20A sliding mode FTC law was designed for flexible spacecraft with multiplicative and additive faults, and the closed loop input-to-state stability was guaranteed.21A faulttolerant attitude stabilization problem was studied to deal with both loss of control effectiveness and additive faults for flexible spacecraft without angular velocity magnitude measurement.22A robust fault-tolerant attitude control scheme was developed for flexible spacecraft with disturbances and actuator failures.23A robust adaptive FTC approach for attitude tracking of flexible spacecraft was proposed against parameter uncertainty by using redundant reaction wheels.24A fault-tolerant attitude and angular velocity control problem of flexible spacecraft was studied to against the actuator complete failure.25Moreover,a fault-tolerant sampled-data control problem was investigated for flexible spacecraft in the presence of partial actuator failures, and probabilistic time delays.26However, the proposed FTC schemes of flexible spacecraft can only deal with faults happening in the rigid dynamics.How to deal with faults occurring in the flexible dynamics is still challenging and far from complete.
An interconnected system consists of a set of subsystems through a certain coupling mechanism,through which the various subsystems work together to achieve satisfactory local or global performance.27In recent years,lots of results have been reported on the fault detection and fault accommodation on interconnected systems.28-32The main purpose of the above literature is to focus on the individual and coupled faults of the interconnected subsystems. By designing the observers of each subsystem,the state and fault information of each subsystem is obtained,and then the controllers of each subsystem are designed based on these estimates to realize the stability of each subsystem. The stability of the entire interconnected system is often considered under the proper connection topology among the subsystems.
In this study, a FTC issue for flexible spacecraft with both faults and disturbances is investigated. The dynamics is regarded as an interconnected system, where the flexible part and the rigid part are coupled with each other. Faults occur only in the rigid dynamics, but also in the flexible dynamics.In order to compensate such faults, two novel FTC schemes,distributed FTC scheme and decentralized FTC scheme, are developed. The fault diagnostic observers and fault-tolerant controllers are designed separately. Cycle-small gain conditions are built to ensure the closed-loop system stability. The main contributions of this paper are as follows.
(1) It expands the flexible spacecraft dynamics by an interconnected system and establishes the fault model and disturbance model.
(2) It develops both the distributed and decentralized FTC schemes for the flexible spacecraft to deal with faults and disturbances.
(3) It builds the cycle-small-gain condition to guarantee the input-to-state stability in the presence of couplings.
The rest of this paper is organized as follows. Section 2 introduces the attitude dynamics of flexible spacecraft and formulates the control problems.Section 3 and Section 4 develop the distributed and decentralized FTC schemes, respectively.Section 5 illustrates simulation results to show the effectiveness of the proposed methods. Section 6 draws some conclusions.
2. Problem statement
2.1. Dynamic equations

2.2. Control objective
3. Distributed fault-tolerant control scheme
In this section, diagnostic observer based distributed faulttolerant controllers are developed for both the rigid and flexible parts, respectively. The small-gain theorem is used to analyze the stability of the whole system.
3.1. Distributed FTC design of flexible part

3.2. Distributed FTC design of rigid part
3.3. Stability analysis of overall close-loop system
4. Decentralized fault-tolerant control scheme
This section develops a novel decentralized fault-tolerant control scheme, and use the small-gain theorem to analyze the closed-loop stability.
4.1. Decentralized FTC design of flexible part
4.2. Decentralized FTC design of rigid part
Lemma 7. Under Assumption 2, the designed fault-diagnostic observer given in Eqs. (32), (33) and (58) guarantees that the error dynamics described by Eqs.(59)and(60)is input-to-state stable with respect to d2,ψ,θ2,and ˙θ2,and the proposed FTC law in Eq.(61)guarantees that the closed-loop system Eq.(24)is input-to-state stable with respect to d2, e2, and ψ.
Proof. Taking the time derivative of V2along Eqs. (59) and(60), yields
4.3. Stability analysis of overall close-loop system

5. Simulation results
In this section, a simulation study on a flexible spacecraft model is given to verify the effectiveness of the proposed distributed FTC scheme and decentralized FTC scheme.
5.1. Flexible spacecraft model
5.3. Simulation results
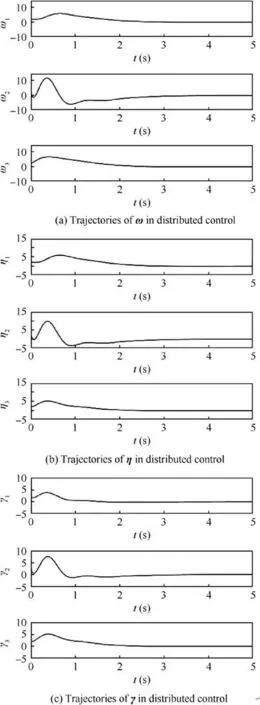
Fig. 1 State trajectories of ω, η, γ in distributed control.
Fig. 1 shows the trajectories of ω, η, γ in distributed control respectively. From these figures, we can see that in the distributed method, the state of the system will eventually converge to a bounded range under fault and disturbance conditions. Through experimental simulation, we can get that the distributed control method can guarantee that when the system fails Both sub-sections reach steady state. Under this set of parameters, we can calculate that |υ12υ21|=0.583 <1,which satisfies the conditions Eq. (49). This shows that our simulation experiments and theoretical analysis can reach the same conclusion.
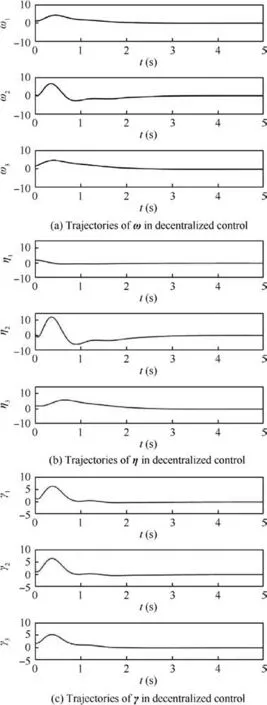
Fig. 2 State trajectories of ω, η, γ in decentralized control.
Fig.2 shows the trajectories of ω,η,γ in decentralized control respectively. From these figures, we can see that in the decentralized method, the state of the system will eventually converge to a bounded range under fault and disturbance conditions. Through experimental simulation, we can get that the distributed control method can guarantee that when the system fails Both sub-sections reach steady state. Under this set of parameters, we can calculate that |Ψ12Ψ21|=0.414 <1,which satisfies the conditions Eq. (49). This shows that our simulation experiments and theoretical analysis can reach the same conclusion.
By comparing the distributed method with the decentralized method,we can see that the control effect of the decentralized method is better than the distributed method.At the same time, we can calculate that under the same parameters, the product of the gain in the decentralized method is smaller than the distributed method, so we can achieve a better control effect through the appropriate selection of the parameters within the conditions for stability.
Fig. 3 presents the comparisons of the state trajectories in different control methods. The dotted line represents the state trajectory in the centralized method, the solid line represents the state trajectory in the distributed method, and the dashed line represents the state trajectory in the decentralized method.It can be seen from these figures that both the distributed FTC design and the decentralized FTC design can also achieve the FTC goal.If some of the states are unmeasurable,the centralized FTC design becomes invalid,since such FTC design needs all the state information of the whole interconnected system.For the distributed FTC design, the states of its own and neighbors are required. This implies that the distributed FTC design has a bigger redundancy than the centralized FTC design.For decentralized FTC design,only its own state information is needed. It indicates that the decentralized FTC design has a bigger redundancy than the distributed FTC design.
6. Conclusions
(1) This paper has developed distributed and decentralized FTC schemes for flexible spacecraft, using the interconnected system approach. The dynamic model of flexible spacecraft is regarded as an interconnected system, in which the rigid body and the flexible mode are coupled.Fault-diagnostic observers and FTC laws have been designed for both the rigid and flexible parts, with the complete stability analysis for the entire closedloop system by using the small-gain theorem. Future work will be focused on the fault-tolerant attitude control for flexible spacecraft by using the quaternion method.
(2) The computation results are in agreement with experimental data.
Acknowledgements
This work is supported by National Natural Science Foundation of China (Nos. 61622304, 61773201), Natural Science Foundation of Jiangsu Province, China (No. BK20160035),and Fundamental Research Funds for the Central Universities, China (No. NE2015002).
 CHINESE JOURNAL OF AERONAUTICS2020年7期
CHINESE JOURNAL OF AERONAUTICS2020年7期
- CHINESE JOURNAL OF AERONAUTICS的其它文章
- An experimental method for squealer tip flow field considering relative casing motion
- A novel none once per revolution blade tip timing based blade vibration parameters identification method
- Highly efficient computation method for hazard quantification of uncontained rotor failure
- Optimal motion cueing algorithm for accelerating phase of manned spacecraft in human centrifuge
- Effective control allocation using hierarchical multi-objective optimization for multi-phase flight
- Trajectory tracking control of a VTOL unmanned aerial vehicle using offset-free tracking MPC