PTP网络非对称时延抖动修正算法设计与分析
2020-08-03 05:46余学锋张开维秦项乾
计算机测量与控制 2020年7期
余学锋,张开维,秦项乾
(中国人民解放军63870部队,陕西 华阴 714200)
0 引言
在常规武器靶场,统一的时间频率基准是确保测量控制设备同步精确工作的重要保证。随着靶场局域网的不断完善,通过局域网实现远程时间频率参数传递及测试成为可能。目前较为成熟的方法就是基于IEEE1588精密时钟协议(PTP),通过网络将主时钟时间信息传递给远端从时钟,一方面为测试设备提供时间信息,另一方面完成对自主守时装置的时间同步测试(校准)。然而现有的PTPV2方法是基于两点假设,一是局域网中的网络交换机支持IEEE-1588v2协议,也就是说要具备PTP报文优先转发、链路时延补偿等协议功能。二是局域网中主时钟到从时钟的路径延迟与从时钟到主时钟的路径延迟相等且链路时延通常不会发生抖动。而靶场实际情况是局域网中的交换机为普通交换机,不支持IEEE-1588v2协议。因此在网络报文传输中由于网络传输阻塞的不确定性会造成链路报文传输非对称时延及抖动(PDV),通常达几百微秒级,而靶场授时及测量精度要求为百纳秒级别,因此必须解决网络传输非对称时延抖动的问题。
关于PTP协议网络传输非对称延时抖动抑制方法,许多学者做了大量的工作。文献[1]提出了最小排队转发时延估计算法;文献[2]提出了采用能够记录报文时间戳的交换设备对其固有延时时间进行修正方法;文献[3]提出一种基于网络区分服务调度模型的同步报文路径延时误差修正方法;文献[4]提出了报文时延分布参数估计方法;文献[5-7]等也都提出了一些很好的方法。但这些方法中有的需要交换机硬件支持,有的需要对交换机进行优先级设置,有的需要在PTPV2协议传输机制中额外增加专门检测报文,有的只是在实验室环境下的性能仿真验证结果。为此,本文提出了采用二级过滤的先进增强时间恢复算法,利用从端接收报文之后,对所有的报文进行算法过滤估值计算,确保收到的不同PDV数据为统一稳定的时间值。当网络传输出现高流量负荷、拥塞而导致的非对称时延抖动时也能恢复出精准时钟,并且在实际普通交换机网络中对算法性能进行测试。
1 PTPV2报文传输模型
PTPV2的基本原理是主从时钟之间周期性交换带有时间戳的报文,从时钟根据时间戳信息计算出路径时延以及主从相位差,进而校正从时钟的时间相位偏差。
设从时钟相对于主时钟的初始时间相位偏差为δ,PTPV2采用主从层次结构(双向报文交换),协议引擎为端对端(E2E)延时测量机制。在同步开始时,主时钟端在t1时刻向从时钟端发送SYNC报文,同时将SYNC报文的发送时刻t1通过跟随报文FOLLOW_UP发送给从时钟端。从时钟端记录SYNC报文的接收时刻t2,t2=t1+d1+δ,其中d1为端对端(E2E)延时测量机制下的主时钟端到从时钟端网络延时。
从时钟在t3时刻向主时钟发送延时请求报文DELAY_REQ,主时钟端记录收到DELAY_REQ报文的时刻t4,t4=t3-δ+d2,d2为端对端(E2E)延时测量机制下的从时钟端到主时钟端网络延时。然后将时间t4通过延时响应报文DELAY_RESP发送至从时钟。这样在每个同步周期,从时钟端就可得到4个时间戳信息t1、t2、t3、t4。根据这四个时间信息,同步系统程序可分别计算出主时钟到从时钟的链路时延、从时钟到主时钟的链路时延、平均链路时延以及主从时钟偏移。

2 延时抖动修正算法
基于PTPV2协议的主从时钟在普通交换机网络下的同步报文传输延时抖动,核心是由于网络阻塞的不确定性,而网络本身又不具备对报文在交换机中的滞留时间标记能力,不能纠正延迟的不对称性,导致从时钟端得到的4个时间戳信息不能真实反映主从时钟同步情况。而先进增强时间恢复(AETR)算法可大大降低主从时钟同步过程中的时延抖动。基本思路是通过对N个时钟同步周期时间戳观测值的统计分析,过滤掉受网络拥塞影响的同步周期,并在未受阻塞的幸运同步周期中,运用从时钟端得到的4个时间戳信息t1、t2、t3、t4,并按照PTPV2协议计算传输延时及偏差修正值,恢复出从时钟调整值。先进增强时间恢复算法能够集成于PTPV2同步协议延时测量机制中,在不增加PTP协议传输通讯开销的前提下,仅将多个同步周期的偏差计算值以缓存的形式存储起来,用于先进增强时间恢复算法的统计分析。AETR算法通过两级连续的过滤算法,确保使用最优同步周期偏差值来恢复出精确的从时钟时间调整信息。另外AETR模型在同步周期偏差值过滤中,不仅过滤掉明显受网络阻塞影响的同步周期,还要对通过一级过滤后的幸运同步周期进行二次过滤,筛选出最优的同步周期偏差值,运用逐次逼近算法,恢复出主从时钟同步周期的精确时间。当在PTP协议网络传输某个同步周期中,从时钟端没有获得符合算法要求的同步周期偏差值时,就采用先前存储的同步周期偏差值进行时钟调整。AETR算法执行过程流程图如图1所示。
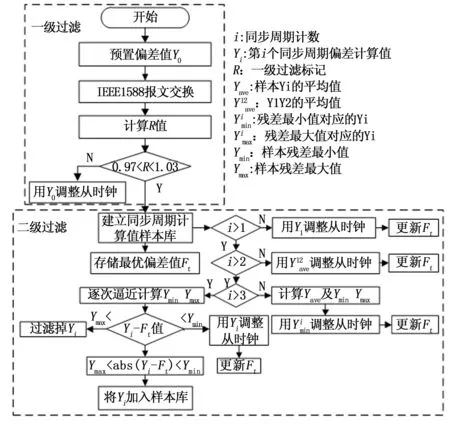
图1 AETR算法执行过程流程图
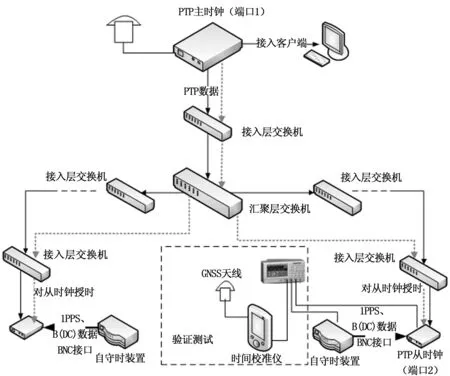
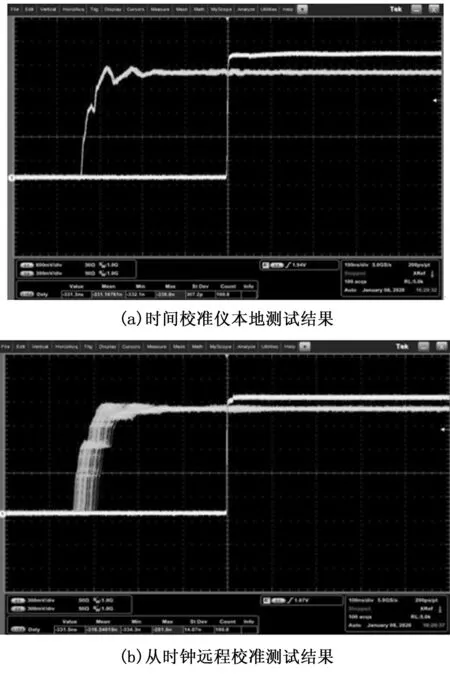
在第一级过滤过程中,主、从时钟按照PTPV2协议中的延时请求-响应测量机制在每个同步周期内交换基本时间信息并计算链路延时偏差。为了实现对遭受传输网络阻塞的同步周期的过滤,设置过滤阈值标记R,R=(t2-t1)/(t4-t3)。若传输网络为对称无时延抖动,理想情况下R值为1,但实际上由于网络阻塞等原因,R值是在1附近变化的,通过设置R的阈值,可将一部分受网络阻塞影响的同步周期过滤掉。该标记值的选择要综合考虑主、从时钟所在网络情况以及时钟同步精度要求,靶场试验IP网属于中度流量网络,主从时钟同步精度要求优于100 ns。因此综合有关报道[8-9],选择的R值过滤范围为0.97 所有通过第一级过滤后的幸运同步周期,从时钟端都将得到4个时间戳信息t1、t2、t3、t4,并按照PTPV2协议进行传输延时及偏差修正值计算,即Yi=[(t2-t1)-(t4-t3)]/2。计算结果存储在缓存中并给以标记,然后进行第二级过滤算法,即精确时间恢复算法。在第二级过滤中,采用偏差逐次逼近方法确保过滤出最优偏差估值,用于计算从时钟当前相位偏差值并对时钟数据更新。这其中有可能还有一些时钟偏差计算值或高或低于预期的偏差值,在数据更新过滤过程中,这些计算值所对应的同步周期也将被过滤掉。数据更新过滤流程图如图1中的二级过滤部分所示。当收到的最新同步周期显示网络中有较大的流量时,从时钟将用上一次的偏差计算值而不会采用当前偏差计算值对从时钟调整。 通过一级过滤后的第一个幸运同步周期,根据获得的4个时间戳计算出从时钟偏差修正值Y1,并用该值对从时钟进行调整。待第二个幸运同步周期,其偏差计算值Y2则与Y1进行求平均值,用平均值对从时钟进行调整。当第三个幸运同步周期到来后,则将三个幸运同步周期的偏差计算值Y1、Y2、Y3求平均值Yt及与平均值的差值Yti,i=1,2,3,计算Yti最大值Ytmax和最小值ytmin,取Yti最小值ytmin所对应的偏差计算值Yi,用于对从钟进行调整,并将该值标记为最优偏差值Ft。 当超过三个以上幸运同步周期到来后,就按照式(1)和式(2)的逐次逼近算法获得ytmin、ytmax。 (1) (2) 式中,k为算法因子。同时求当前偏差计算值Yi与Yt的差值,若二者差值绝对值小于Ytmin,则用当前值Yi对从钟进行调整,并将该值标记为最优偏差值Ft,如果Ytmin<|Yi-Yt| 在靶场试验IP网络中(网络拓扑图如图2所示),共有五级网络交换。将PTPV2主从时钟接入该局域网中,以主时钟对从时钟进行授时,从时钟始终与主时钟保持同步,从时钟提供校准时间对远端自守时设备的1 pps同步精度进行测试。主从时钟间同步精度以及从时钟对自守时设备的1 pps测量误差均采用更高精度的时间校准仪及数字存储示波器进行监测,用于评价采用先进增强时间恢复算法后的主从时钟授时及测量性能。 图2 PTPV2测试网络拓扑图 对已有的符合IEEE1588V2协议的主从时钟系统处理软件中,增加延时抖动修正过滤算法,并将两个网络流量模拟源链接于网络中,模拟高流量负荷、拥塞而导致的大分组时延变化(PDV)环境,进行主从时钟同步精度及从时钟远程校准验证测试。 首先进行主从时钟授时精度测试,用时间校准仪对主时钟的时间精度进行校准,误差小于10 ns,因此当把主从时钟接入局域网后,时间校准仪对从时钟端的测量(借助数字存储示波器)结果就代表了主从时钟同步精度。 将主、从时钟分别接入靶场试验IP网的端口1和端口2(5层交换机),进行初始化设置,待稳定后采用时间校准仪及数字存储示波器对从时钟1 PPS输出进行测试(相对于主时钟1 PPS输出),连续测量24小时,期间通过两个网络流量模拟源对网络交换机施加最高到80%的数据量。测试结果如图2中所示。主、从时钟网络传输同步时间抖动呈正态分布,平均值为15.5 ns,标准偏差为6.0 ns,抖动最大范围为-12.9~45.6 ns。 图3 主、从时钟授时精度及同步时间抖动 其次进行基于网络的从时钟远程校准性能测试。将主、从时钟分别接入靶场试验IP网的端口1和端口2(5层交换机),进行初始化设置,待稳定后将被校准时统装置(自守时)先与放在端口2的时间校准仪进行本地测试,测试结果作为标称值,如图4(a)所示。再将被校准时统装置接入端口2所在的从时钟1 pps IN测试口进行测试,测试结果如图4(b)所示。共进行100次测量,采用时间校准仪本地校准和PTPV2远程校准的时统装置同步误差测量平均值分别为-331.1、-316.5 ns,二种方法测量偏差为14.6 ns,保持了很好的一致性。 图4 基于网络的从时钟远程校准性能测试 在基于PTPV2协议的主从时钟同步中,本文设计的先进增强时间恢复算法,可有效抑制由于普通交换机网络报文传输延时抖动所带来的同步偏差,大大提高主从时钟同步精度。实际应用情况也表明,在有5级普通交换机下,主从时钟同步精度可优于100 ns,这也为基于局域网的远程时间频率校准奠定了基础。 先进增强时间恢复算法是在PTPV2周期性交换网络数据报文基础上,增加了传递报文过滤评估环节,使得收到的不同PDV数据为统一稳定的时间值。如果考虑时间同步中的偏移率及环境温度的影响,二级过滤阈值的选择则需要更为细致,有关这方面问题在未来工作中有待进一步的研究。3 试验结果与分析

4 结束语
猜你喜欢
汽车电器(2022年9期)2022-11-07电子技术与软件工程(2022年11期)2022-09-09快乐作文(1.2年级)(2022年5期)2022-05-31汽车电器(2021年6期)2021-07-05三悦文摘·教育学刊(2021年52期)2021-04-27科学家(2021年24期)2021-04-25疯狂英语·爱英语(2020年12期)2020-12-29疯狂英语·爱英语(2020年12期)2020-12-29中学数学杂志(初中版)(2019年6期)2019-01-14软件导刊(2016年7期)2016-05-14