足踝手术支架在骨科手术机器人辅助手术中的有效性与安全性研究
2020-07-31 07:37:16郭榕晨武勇
中华骨与关节外科杂志 2020年2期
郭榕晨 武勇
(北京积水潭医院1.手术室,2.足踝外科,北京 100035)
伴随人口老龄化进程加快,机动车保有量增加,以及全民健身意识的提升,因退行性变、高能量损伤、跌落伤和运动损伤而诱发的足踝部骨折患者逐渐增多。传统足踝部手术,尤其是微创手术的开展受制于术者经验和医疗器械,存在操作精度不稳定、复杂术式难以普及等不足[1-3]。由北京积水潭医院与北京天智航医疗科技股份有限公司等单位合作研发的天玑®骨科手术机器人(以下简称“Ti-Robot”)自2016年上市至今已在全国范围内创伤、脊柱外科得到越来越广泛的研究和应用[4-13]。北京积水潭医院足踝外科自2018年引入Ti-Robot开展足踝外科手术,针对常规手术中的局限,已创新地开展了多种机器人辅助术式的应用。
机器人辅助手术仍然是一项全新的技术,医护人员需要经过较长的学习曲线才能熟练掌握和运用。为此,开发术中辅助工具,使操作机器人的医护人员精准、高效地完成手术,进一步提升术中医患满意度已经成为使用机器人医护人员的刚性需求。针对足踝外科术中护理的需求,自主研制开发了一种足踝手术支架(专利申请号CN201920059644.6),用于Ti-Robot 辅助手术中的肢体定位,提升手术效率,同时减少患者创伤。回顾性研究北京积水潭医院2018 年4 月至2019 年4 月收治的30 例足踝手术患者,对术中Ti-Robot辅助手术的常规应用指标进行比较,旨在分析和评价足踝手术支架在Ti-Robot辅助手术中的有效性和安全性。
1 资料与方法
1.1 一般资料
纳入标准:①适合使用导针和空心螺钉进行足踝内固定手术,②无骨折处感染。排除标准:①不能耐受手术者,②拒绝签署手术知情同意书或无法接受骨科手术机器人辅助治疗者。
根据上述标准,共纳入2018 年4 月至2019 年4月在北京积水潭医院完成的Ti-Robot 辅助下足踝手术患者30 例,其中跟骨骨折1 例,距骨骨折10 例,马蹄内翻足3 例,踝关节骨折4 例,跖跗关节骨折2 例,踝关节骨关节炎6 例,踝关节创伤性关节炎2 例,下胫腓联合分离2 例。术中使用足踝手术支架辅助手术的15 例为研究组,术中不使用足踝手术支架辅助手术的15例为对照组。
1.2 足踝手术支架组装
足踝手术支架的功能是配合Ti-Robot 在术中支撑、临时固定患侧肢体,便于Ti-Robot 有足够的空间执行规划,以及术者进行后续手术治疗操作。另外还可以将Ti-Robot的患者示踪器固定于足踝支架,便于实时跟踪定位,同时减少了患者的非治疗性切口。足踝手术支架的结构见图1。简要术前准备流程如下:①将灭菌好的支架于器械车上打开,安装好硅胶肢体绑带及尺寸适宜的肢体延长板;②将支架放置于患肢下正中的位置,Y 形支撑部分安放于患肢的膝关节和胫骨中下段,并使足踝部放置于组装好的肢体延长板上;③根据术中透视或扫描范围要求,调整基底滑块位置及旋动Y 形支撑部分上下2 枚螺栓,将肢体高度调整至适当位置;④将2 个Y 形部分按照倒八字角度打开,这样可使足踝部肢体远离支架的金属部分,防止术中透视或扫描的遮挡;⑤在支撑角度和肢体高度调整完成后,锁紧基底滑块及Y形支撑部分上下的所有螺栓,用硅胶绑带将肢体加压扎缚固定;⑥调节患者示踪器固定架角度,在确保患者跟踪器利于光学跟踪器识别的角度上,将跟踪器扎实固定在固定架上。
1.3 手术方法
麻醉方式为腰麻加神经阻滞麻醉,术中患者均需要固定下肢。30 例手术均为同一组医师完成,其中对照组按照常规步骤手术,研究组使用专用足踝手术支架辅助手术,其他手术步骤和手术器械两组相同。手术流程如下:①闭合或开放完成解剖复位,以使关节对合或纠正畸形,常规固定或使用足踝手术支架辅助固定患肢;②将Ti-Robot机械臂罩上无菌膜,移动至手术床旁并固定,确保机械臂有足够的操作空间,光学跟踪器位于患者足端,C 型臂X 线机位于主刀医师对侧;③将患者示踪器固定在患者肢体或足踝手术支架上(图2),调整C 型臂X 线机的位置使其影像增强器对准术区,获取含有机器人定位标记点的术中影像数据,并传输至主控台工作站进行图像配准;④根据术中采集的图像,术者基于骨性标志结构进行预置入螺钉路径的规划;⑤由机械臂运行至规划的位置,在Ti-Robot 末端手术工具的引导下,术者按照规划路径置入导针,透视验证导针位置,置入空心螺钉对骨块固定,确认螺钉位置良好后取出导针,切口冲洗缝合,手术完成。
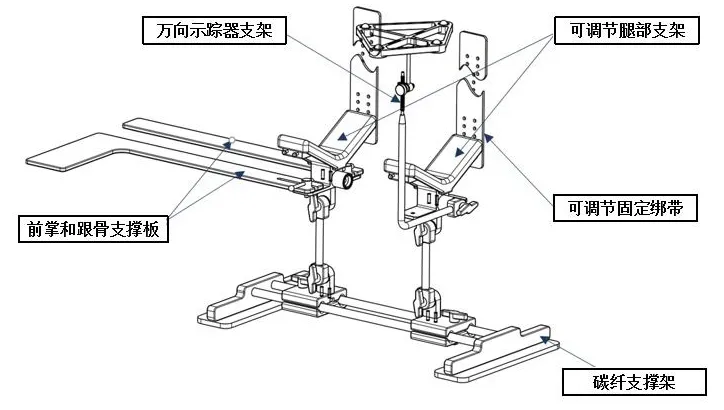
图1 足踝手术支架的结构示意图
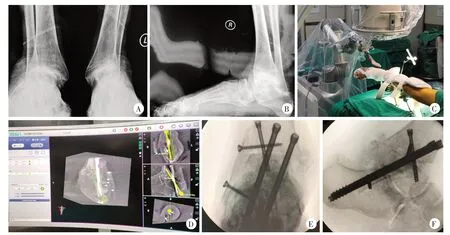
图2 患者,男,66岁,右踝关节骨关节炎,行踝关节融合术、距下关节融合术治疗
1.4 观察指标
术中记录体位固定、患者示踪器固定、机器人执行和定位所用时间,以及采集影像资料时C 型臂X 线机调整的次数。两组手术过程和难度可能存在区别,但对本研究选取的指标均无影响。因为这些指标是Ti-Robot辅助手术相关的步骤,与手术治疗的操作时间和过程无关。同时记录研究期间发生的不良事件,计算并比较两组不良事件发生率,进行安全性评价。
1.5 统计学方法
采用SPSS 16.0软件进行统计分析,计量资料以均数±标准差表示,组间比较采用独立样本t检验。以P<0.05为差异有统计学意义。
2 结果
2.1 有效性评价
研究组患者术中的体位固定时间、患者示踪器固定时间及机器人执行引导和定位时间均显著少于对照组(P<0.01),表明使用足踝手术支架辅助Ti-Robot 手术可以提高手术效率,缩短操作时间。采集影像资料时,C 型臂X 线机透视调整次数,两组间比较无统计学差异(P>0.05),表明医技人员对足踝部的解剖部位认知相同,并且操作技能熟练(表1)。
2.2 安全性评价
所有患者均进行术后X 线片和CT 检查验证,外科医师通过术后影像资料确认所有螺钉位置满意,未发生螺钉置入方向偏离规划路径、伤口感染等其他螺钉置入相关的并发症发生,未发生与试验设备相关的不良事件。由于足踝手术支架可以准确、快速调节患肢的高度和旋转角度,固定效果更加稳定牢靠,相比常规固定方式,主刀医师在使用足踝手术支架辅助手术时可以进行360°操作,手术入路方式的选择更为自由,安全性更高。
3 讨论
3.1 Ti-Robot的特点
Ti-Robot 采用和规划系统相联系的机械臂执行手术规划信息,手术规划信息发送给机械臂,机械臂根据规划信息指令建立手术导针进入的空间位置。手术规划信息和机械臂导引的空间位置有统一性。同时,机械臂建立的导引通道有刚性结构,成为置入导针的依托,完全消除了医师在打入导针过程中因手臂生理抖动、疲劳等因素引起的偏差,保障手术的精准,很好地完成医师的手术意图。采用Ti-Robot开展手术,仅需要在必要的关键环节进行透视,使X 射线辐射量大幅下降,可显著减少对医患的辐射损伤[14]。手术步骤规范化,可分为:图像采集和配准,手术路径规划,机器人辅助定位,透视验证路径。
表1 两组术中手术指标比较()

表1 两组术中手术指标比较()
Ti-Robot 实现了精准、微创、智能化手术治疗的效果,同时降低患者的手术费用,提高患者的术后生活质量,有效避免医护人员的辐射损伤[15-23]。北京积水潭医院足踝外科自引进Ti-Robot后,经过一段时间的使用发现,术中的护理操作对手术时间的影响因素主要包括术中肢体固定的速率,以及机器人辅助定位时光学跟踪系统识别患者和机械臂跟踪器的效率。
3.2 足踝手术支架的优点
首先,固定肢体时固定角度应易于导针和空心螺钉的置入,由于足踝部骨块形态各异、小关节众多且韧带系统复杂,有些患者肢体严重畸形(如马蹄内翻足),常规固定方式很难实现一次达到术者要求,通常需要多次调整肢体固定位置。常规固定使用的工具一般为铺单、棉垫、胶带、可透光夹板等,这些工具并非专门用于足踝部固定,置入导针或螺钉时可能会遮挡、阻碍或限制医师的操作。术中使用足踝手术支架,洗手护士可事先根据术者的要求,灵活调整足踝手术支架的角度,且术区距离手术床面的高度可调,通过简易牢靠的固定绑带即可实现肢体固定,体位固定便捷。并且患肢与手术床之间距离增大,Ti-Robot 在执行引导和定位功能时操作空间增大,可以实现导针360°置入。固定绑带及足踝手术支架与肢体接触的部分使用了宽大的硅胶材料,可减轻固定时对患者皮肤的压迫,同时也起到了绝缘的作用,术中可以安全使用电刀。
其次,在Ti-Robot 辅助定位前,需要确保光学跟踪系统同时识别患者示踪器和机械臂跟踪器。患者示踪器的常规固定方式是在胫骨前侧或跟骨上临时置入1 枚直径5 mm 螺纹针,置入深度须超过20 mm,然后再将患者示踪器固定在螺纹针上,螺纹针与骨质、示踪器与螺纹针之间必须牢固固定,否则引导和定位过程中Ti-Robot 系统的精度将受到影响。固定后,因受到患者体位制约,患者示踪器的朝向无法调整,在机械臂执行规划时,需要巡回护士多次调节角度,以便光学跟踪相机同时识别患者和机械臂跟踪器,从而延长了机器人执行时间。另外,为减少皮肤和肌肉的牵拉而造成的患者示踪器移位,首先需要在固定位置上做15 mm左右切口,然后对皮肤和肌肉进行分离之后再置入螺纹针,额外增加了非治疗性创伤。使用足踝手术支架固定时,患者示踪器固定在角度可调的万向支架上,不需要通过螺纹针固定在患者肢体上,因此既可以保证患者示踪器始终处于容易被光学跟踪系统识别的位置,又减少了置入螺纹针的手术步骤,从而减少术中患者示踪器的固定时间和机器人执行时间,同时还免除了患者的非治疗性创伤。
3.3 使用足踝手术支架的注意事项
使用足踝手术支架辅助Ti-Robot 手术显著提高了手术效率,但是对手术室护士的工作要求也有所提高。足踝手术支架的设计包括许多体积较小的金属部件和体积较大的支架,为确保金属缝隙和螺纹表面彻底高温高压灭菌,灭菌准备时需要全部拆散、彻底清洗后再进行包装、灭菌。术前拆开灭菌包时,巡回护士与洗手护士需共同检查部件是否完整,避免遗漏而造成术中无法正常使用。术中组装之前,洗手护士需要提前与主刀医师充分沟通,了解术中患者体位固定方式,并且要非常熟悉Ti-Robot的操作流程,从而预先按照需求组装足踝手术支架,提升医护配合效率。这些工作都增加了额外的管理成本和医护人员的工作量,因此产品设计还有待改进。
综上,足踝手术支架可以显著提高手术效率,随着Ti-Robot在足踝手术中的广泛应用,足踝手术支架作为必要辅助配件使用,有利于手术的开展,提高术中护理人员配合术者操作的准确性,缩短手术时间、减少患者创伤,提升术中护理的医患满意度。
猜你喜欢
实用手外科杂志(2022年2期)2022-08-31 09:47:16
生物骨科材料与临床研究(2018年6期)2019-01-11 09:08:32
实用骨科杂志(2018年9期)2018-10-08 02:52:42
电子机械工程(2018年3期)2018-08-02 05:08:24
创伤外科杂志(2017年7期)2017-09-04 01:58:17
实用手外科杂志(2015年2期)2015-08-28 09:50:40
实用手外科杂志(2015年3期)2015-08-27 01:53:22
实用手外科杂志(2015年1期)2015-08-27 01:52:16
中国实用医药(2014年29期)2014-10-23 12:37:22
中国中医药现代远程教育(2014年21期)2014-03-01 04:32:31