
复合控湿系统在博物馆大型恒湿机组中的应用
2020-07-28 02:37张阳,周迪
自动化与仪表 2020年7期
张 阳,周 迪
(合肥工业大学 仪器科学与光电工程学院,合肥230009)
文物具有极高的历史、艺术及科学价值,其自身不可再生、不可替代的特点,对文物的预防性保护提出了较高要求[1]。文物所处微环境中有多种因素可对文物寿命产生影响,如温度、 相对湿度、光照、微生物等,其中相对湿度是对文物产生影响的重要因素。不适宜的湿度环境对不同材质的文物会产生不同影响,如导致彩绘类文物出现龟裂、起痂、受潮等老化病[2];或导致青铜器类文物大面积出现“青铜病”的现象[3],造成难以估量的损失。
博物馆是文物存放、展示的主要场所,多采用各类湿度调控设备为展柜内文物营造适宜的湿度环境[4]。大型控湿机组采用集中式调控方式,与其它调控方式相比,其经济性好、易于维护、不受展柜形式制约,具有广阔的应用前景。
文中恒湿机组内部除湿部件及加湿部件同时工作,共同调控气体的相对湿度,被控对象具有滞后性强、惯性大的特点[5]。在不同情况下除湿部件性能变化对系统产生较强干扰,因此只采用传统PID控制器无法满足调控要求。本文先在无干扰情况下使用Matlab 对系统进行仿真分析并设计PID 控制器,获得合适的控制参数以达到较好的控制效果,在此基础上结合实际调试经验,设计模糊控制器以补偿系统中的干扰信号,进而提出了一种复合控制方法。最终通过实验验证该方法的调控效果,证明其具有调控精度高、鲁棒性强的特点,能够满足行业标准中对设备控湿精度的要求[6]。
1 恒湿机组智能测控系统设计
恒湿机组智能测控系统拓扑图如图1 所示,机组采用集中式控湿方案,单台设备可满足多个展柜对其内部微环境相对湿度的要求。过滤后的气体从进气口通入机组内部,机组对其调控后通过出气口排出。出气口处设有温湿度传感器,与调控部分共同组成闭环控制系统。如果当前排出气体符合要求,则三通阀打开,气体通入主管路,再由各支路通入展柜,为展柜营造出适宜的相对湿度环境。同时机组还具有与用户交互的人机交互部分及与上位机通讯的功能。
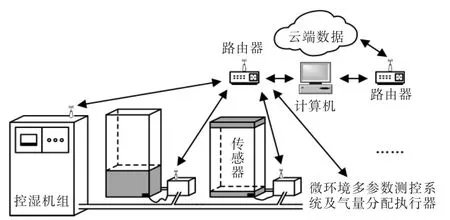
图1 恒湿机组智能测控系统拓扑图Fig.1 Topology diagram of intelligent measurement and control system for constant humidity unit
机组本身结构图如图2 所示,其按功能可分为4 个部分:主控器、电气部分、人机交互接口及外围执行部件。
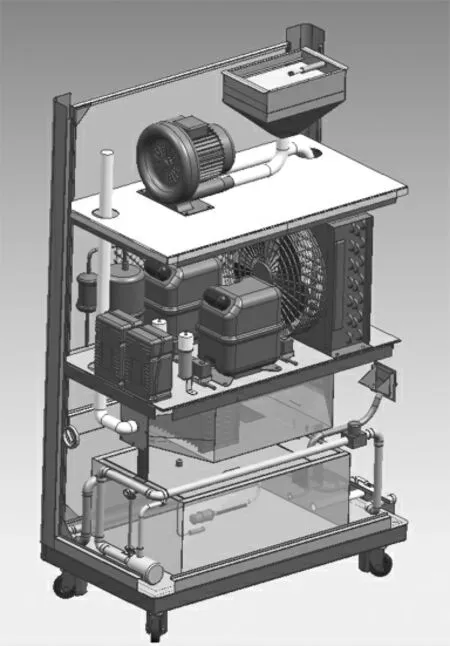
图2 机组结构Fig.2 Structure of unit
外围执行部件中与湿度调控直接相关的是控湿腔体内部的加热丝及蒸发器,其具体结构如图3所示。
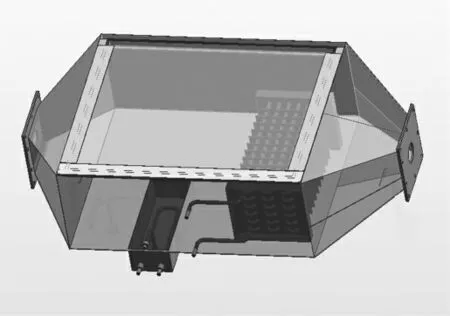
图3 控湿腔体内部结构Fig.3 Internal structure of humidity control cavity
主控器硬件以STM32F103 单片机为核心,具有各类信号采集电路及驱动电路,可以实时采集各类传感器信息,通过对电气系统的控制进而协同各外围执行部件工作,共同完成对出气口处气体相对湿度的调控。同时它还具有WiFi 通讯功能,可以实时接收上位机指令或向上位机反馈自身各部件状态。人机交互硬件上使用具有触控功能的液晶屏幕与主控器通过RS232 电平标准的串口实现数据传输,供用户设置恒湿机的各类参数及实时获取机组当前工作状态,该系统的系统框图如图4 所示。
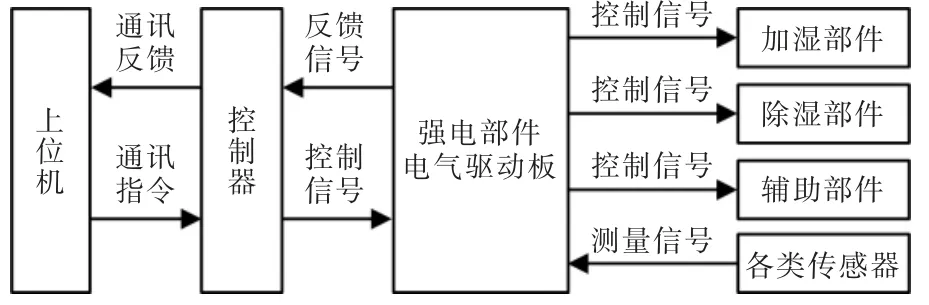
图4 系统框图Fig.4 System block diagram
机组的控湿腔体内部有加湿部分和除湿部分。其中加湿部分利用蒸汽加湿的方法,在水槽内放置加热丝,使用PWM 信号控制加热丝的通断电时间以达到控制水温的目的,进而控制产生蒸汽量的大小,最终实现对加湿效果的调控。除湿部分利用蒸发器制冷除湿的方法,液态氟利昂在蒸发器内部汽化吸热,导致蒸发器叶片温度下降,空气流经叶片表面时温度降低导致其内部水份凝结,最终实现对气体除湿。加湿部分和除湿部分在湿度调控腔体中协同工作,共同完成对空气湿度的调控。
2 复合控制器调控原理
由图3 可知被控气体在腔体内由加湿部分通向除湿部分。但由于蒸发吸热除湿方式的一个重要特征为当被控气体温湿度较高时,除湿效果会显著增强[7],实测的蒸发器除湿效果如图5 所示。

图5 蒸发器除湿效果图Fig.5 Evaporator dehumidification effect
由图5 可知当气体相对湿度在30%~50%时蒸发器除湿曲线平缓,可以认为此时系统工作在较为理想的情况下;而当相对湿度较高时,蒸发器除湿量较大,且在不同相对湿度时变化较为明显。此时系统非线性严重,难以对系统进行辨识,因此传统PID 以误差反馈消除误差的调控方式无法满足调控需求。此外,当机组工作在不同外部环境时外界环境同样会对系统带来各类干扰。
本文提出的复合控制器采用PID 控制器和模糊控制器共同调控的方式,其调控原理如图6 所示,PID 控制器采用闭环反馈的结构,基于偏差对湿度进行调控,而模糊控制器采用开环的结构,实时获取系统内部及外部的扰动信号,并依据自身的控制规则推理出输出信号,对干扰信号进行补偿[8]。最终PID 控制器和模糊控制器的输出信号叠加,共同作为复合控制系统的输出。

图6 复合控制器调控原理图Fig.6 Control principle of compound controller
3 复合控制器设计
3.1 系统建模
首先在理想情况下进行系统辨识,有多种信号可在系统辨识过程中用作输入信号,如阶跃信号、脉冲信号、正弦波、继电器信号等[9],由于阶跃信号在实际实验时易于产生,因此本文采用阶跃信号作为输入信号。在机组工作过程中,控制加热丝的PWM信号占空比为0%~50%、周期为1 s 时,可以认为蒸发器扰动较小,机组工作在较为理想的情况下,因此,在外界温度为19.8 ℃、相对湿度为50.3%时先向加热丝通入占空比为0%、周期为1 s 的PWM 信号,待输出趋向稳定后,将控制信号占空比变为50%,以营造出一个阶跃信号。观察机组输出的变化情况并记录,过程数据记录见表1。
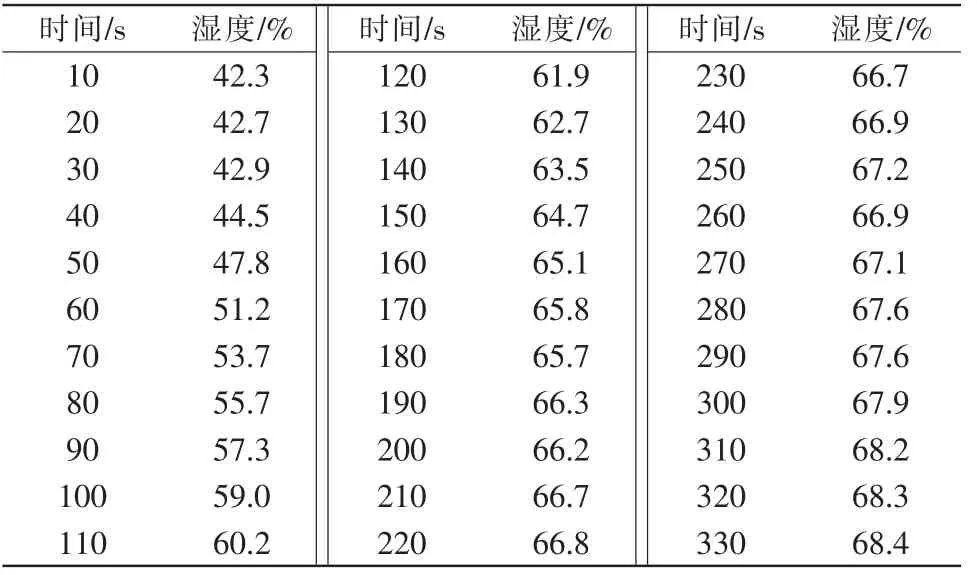
表1 系统对阶跃信号的响应效果Tab.1 Response of the system to step signals
从机组对阶跃信号的响应曲线可知,其与一阶纯滞后系统的响应曲线类似,因此可以认为当机组工作在理想状态下时,可将其等效为一个一阶纯滞后系统,其传递函数为式(1),K、t、T 分别为开环增益、纯滞后时间及惯性时间常数[10]。

对于一阶纯滞后系统,可通过切线法、面积法、两点法等确定其传递函数,切线法简单直观,方便确定模型参数[11],因此本文采用切线法确定系统模型参数。最终,理想工作状态下系统传递函数如式(2)所示:

3.2 PID 控制器设计
本文采用经典PID 算法对工作在理想状态下的系统进行控制,因此问题为确定KP、KI、KD3 个参数。对于常规PID 控制器的参数整定有多种方法,本文采用ZN 经验公式法[12]与试凑法相结合的方式,整定出具有最佳调控效果的参数,Ziegler-Nichols 经验公式为式(3):

根据公式法整定出的KP、KI、KD参数分别为0.43、0.11、0.43,使用Simulink 工具对其控制效果仿真[13],得到的仿真效果如图7 所示。
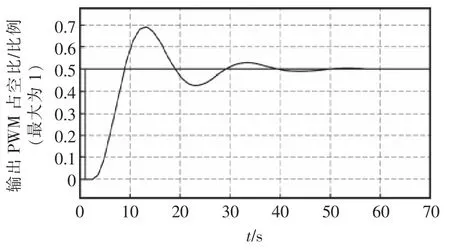
图7 PID 控制器仿真效果Fig.7 Simulation results of PID controller
在外界环境温度为20.6 ℃、湿度为47.3%时,先将目标相对湿度设置为45%,等待其基本稳定后,设定目标相对湿度为50%,观察其调控效果,并使用试凑法对参数微调,优化控制效果,最终的控制效果如表2 所示。
3.3 模糊控制器设计
3.3.1 输入模糊化及输出逆模糊化方法
系统的干扰由外部干扰和内部干扰组成,其中外部干扰为系统工作环境的相对湿度,可以通过传感器获取; 内部干扰为蒸发器工作特性的变化,可以通过目标相对湿度获取。因此模糊控制器有2 个输入,即环境湿度和目标相对湿度,输出为PWM 占空比。对3 个变量进行量化后的离散论域均为{-2,-1,0,1,2},对应的模糊集合为负大、负中、零、正中、正大,英文缩写为NB、NM、ZO、PM、PB。三个变量中环境湿度的物理论域为[10,80],因此量化因子为0.057;目标相对湿度物理论域为[30,70],因此量化因子为0.1;PWM 占空比的物理论域为[0,70],因此量化因子为0.057。在Simulink 中针对3 个变量各自论域及模糊集合设定隶属度函数[14],均采用三角函数,各模糊子集覆盖范围大小相同,具体效果如图8 及图9 所示,逆模糊化方法为最大隶属度法。
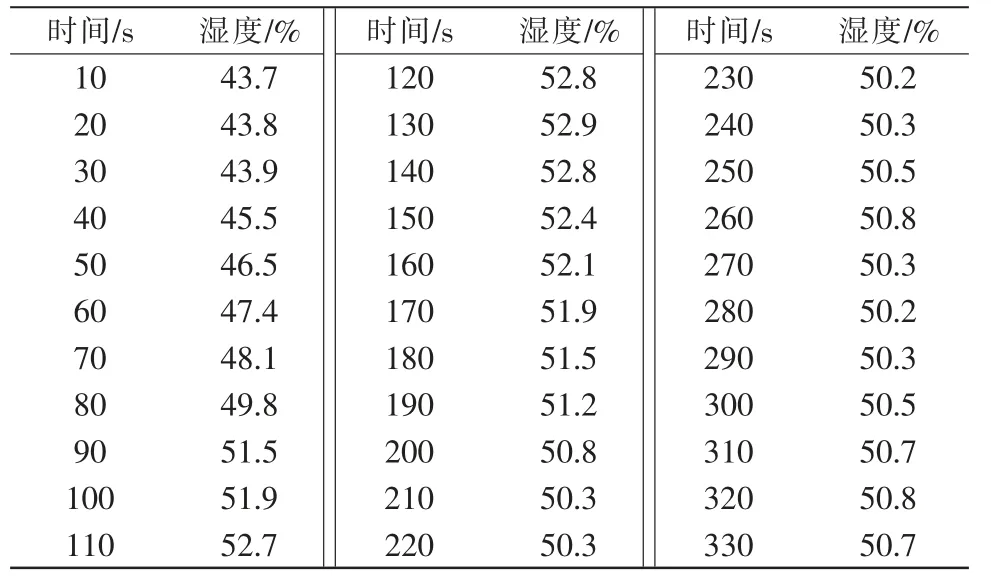
表2 目标湿度为50%时机组的实际调控效果Tab.2 Actual control effect of the unit when the target humidity is 50%

图8 输入变量模糊化Fig.8 Fuzzification of input variables

图9 输出变量模糊化Fig.9 Fuzzification of output variables
3.3.2 建立模糊控制规则
根据实际调试经验建立二维模糊语句,表示在不同环境及目标相对湿度的情况下,模糊控制器会有不同的PWM 信号输出,具体建立方法如图10 所示。

图10 建立模糊条件语句Fig.10 Building fuzzy conditional statements
3.3.3 模糊推理方法
根据模糊条件语句建立关系矩阵的方法有多种,其中比较有代表性的方法为Zadeh 法和Mamdani法,Mamdani 法相比之下更严密。由于控湿部分非线性严重,因此采用Mamdani 法作为模糊推理方法。
3.3.4 模糊控制器仿真
使用Simulink 对模糊控制器方案,仿真效果如图11 所示,从图中可以看出针对干扰信号的不同情况,模糊控制器可以输出不同占空比的PWM 信号以补偿干扰信号。
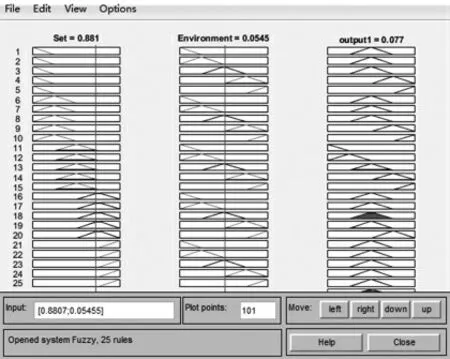
图11 模糊控制器仿真效果Fig.11 Simulation effect of fuzzy controller
4 复合控制器的实际调控效果
首先在外部工作环境温度为20.2 ℃,湿度为48.9%的条件下,将目标相对湿度调至60%,PID 算法和复合算法的实际调控效果数据记录分别如表3及表4 所示,由表中数据对比可以看出,在目标相对湿度较高时,PID 控制算法震荡明显,而复合控制算法调控效果较好。
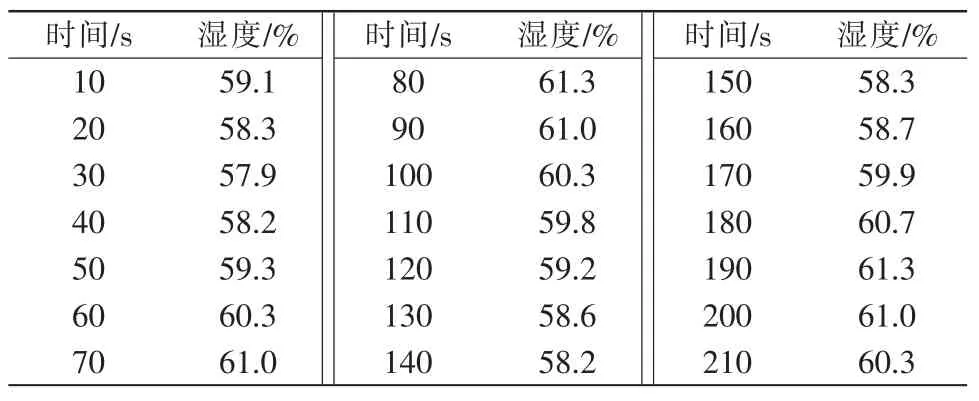
表3 目标湿度为60%时普通调控算法的控制效果Tab.3 Control effect of common control algorithm when target humidity is 60%
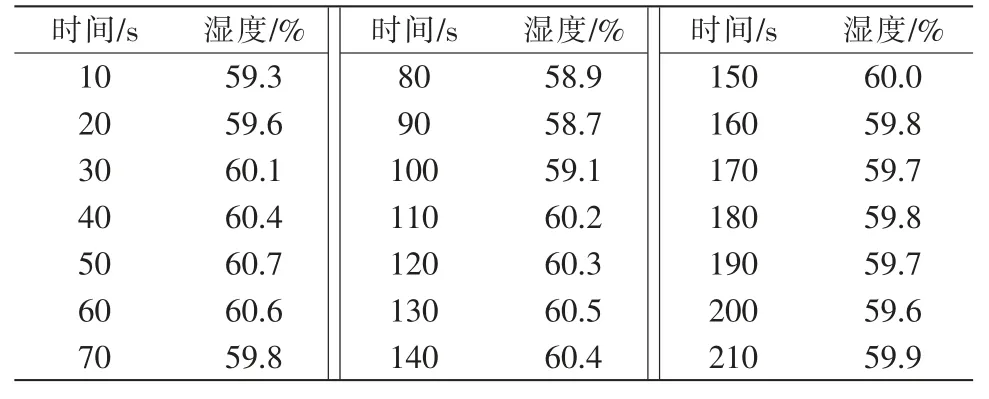
表4 目标湿度为60%时复合调控算法的控制效果Tab.4 Control effect of compound regulation algorithm when target humidity is 60%
将在环境温度为25.5 ℃,湿度为51.3%的条件下,将目标相对湿度调至70%,观察两种调控算法的调控效果,其对比情况如表5 及表6 所示。从表中数据可以看出,当目标相对湿度提高时,蒸发器工作特性变化明显,普通PID 调控不但震荡加剧,且难以达到70%的目标相对湿度,而复合控制算法虽然与目标值为60%时相比震旦加剧,但湿度始终维持在70%左右的目标相对湿度,稳定性较好。
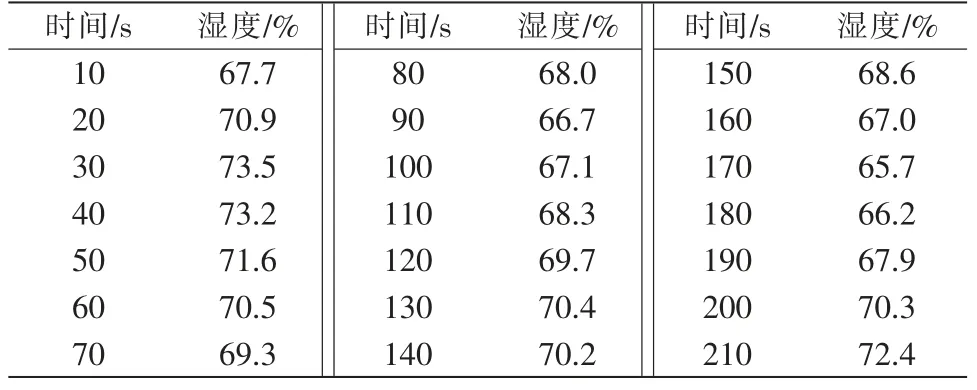
表5 目标湿度为70%时普通调控算法的控制效果Tab.5 Control effect of common control algorithm when target humidity is 70%

表6 目标湿度为70%时复合调控算法的控制效果Tab.6 Control effect of compound control algorithm when target humidity is 70%
5 结语
博物馆大型恒湿机组在湿度调控过程中由于自身部件特性及外部环境变化会给系统带来较大干扰,且系统自身非线性较强,传统PID 控制算法无法满足调控要求。本文结合自动控制理论中不变性原理及实际调试经验,提出了复合控制算法,模糊控制器有效补偿了系统中的各类干扰信号,保证PID 控制器工作在较为理想的情况下,可以满足实际应用需求。此方法同样适用于其他具有非线性且存在干扰信号的系统。
猜你喜欢
中国特种设备安全(2022年4期)2022-07-08
计算技术与自动化(2022年2期)2022-07-04
铁道建筑(2022年3期)2022-04-07
农业与技术(2022年3期)2022-02-25
汽车工程师(2021年12期)2022-01-17
海军航空大学学报(2021年1期)2021-09-01
化工设计(2020年3期)2020-06-27
通信电源技术(2020年22期)2020-03-27
种子科技(2017年7期)2017-08-11
科技创新导报(2016年5期)2016-05-14
