
新型自动化岸电对接方案探讨
2020-07-28 02:37曹小华彭绪然
自动化与仪表 2020年7期
王 强,曹小华,丁 凯,彭绪然,邱 丹
(武汉理工大学 物流工程学院,武汉430063)
岸电技术,也被称作冷铁(cold ironing)或可替代海洋动力,通过从岸边向船舶提供电力,使船舶在停泊时避免使用船用柴油机,从而减少船舶污染的排放。近年来,岸电技术已经在我国部分港口应用,但尚未完全普及,原因之一是岸电对接过程步骤繁琐、耗时过长,降低了港口与船舶的经济效益。如何利用现有技术改善岸电对接技术,是值得人们深入探讨的课题。
国际上现有的改进岸电对接系统,如Cavotec公司研发的APS 系统[1]、ABB 公司推出的IRB7600岸电系统[2]、Damien FEGER 提出的PLUG 对接方案[3]等,都可以极大地提高对接效率,但仍未完全脱离人工操作,且存在大幅度改变船舶外形的情况,因此对船舶岸电系统智能化、简易化的需求十分迫切。
在此,为岸电与船舶的对接系统构造了新的框架,通过图像识别确定船舶以及接口位置后进行对接,目的是为港口和船舶使用岸电提供更为简洁高
效的选项,可以在尽量保留船舶原有外形与设备的基础上实现自动化精准对接。新框架对于降低对接作业成本,提高效率,提升对接系统自动化程度,有着重要的现实意义。
1 自动化岸电对接系统组成
在此所定义的新型自动化岸电对接系统的基本元素包括岸基装置、 电缆提升装置、 船载装置3个部分。自动化岸电对接系统及其仿真如图1,图2所示。

图1 自动化岸电对接系统框图Fig.1 Block diagram of automatic shore power docking system

图2 自动化岸电对接系统仿真图Fig.2 Simulation diagram of automatic shore power docking system
1.1 岸基装置
岸基装置由安装在港口的向船舶提供岸电的设备和监控系统构成。港口向船舶提供岸电一般通过布置在泊位旁的配电箱引出电源,通过电缆接入接受岸电的船舶。监控系统分别安装于岸边和电缆提升装置末端,通过在电缆提升装置上安装自动稳定云台、高清监控摄像机及红外成像仪来实现。在工作过程中,监控摄像机和红外成像仪对探测目标同时进行探测,并产生符合灵敏度要求的双路图像视频信号,提供给计算机进行处理[4]。岸边和电缆提升装置上摄像头的布置如图3 所示。

图3 岸边和电缆提升装置上摄像头的布置Fig.3 Arrangement of cameras on shore and cable lifting device
1.2 电缆提升装置
电缆提升装置是具备在一定范围内旋转和移动能力的机械臂。其工作时,将码头岸电箱输出的电缆缠绕在电缆卷盘上,电缆从电缆卷盘出来后沿臂架布置,电缆接头固定在电缆提升装置末端,并在装置末端设置有摄像头作为监控系统的一部分。
1.3 船载装置
船载装置由安装在船上的受电装置和对接引导装置组成。对接引导装置为一个能够伸缩引导对接的托盘,在电缆提升装置带动电缆接头移动到达指定位置后,将电缆接头放置在托盘的卡口上,待电缆接头固定好,引导其插入受电装置进行对接。
2 自动化岸电对接流程
步骤1由岸上摄像头获取包含有目标船的图片,依靠船舶向岸边发送的交互信息如船型、船名等,利用图像轮廓识别技术辨认出待对接的船舶;
步骤2由已知的接口位置信息,计算出接口在目标船的具体区域;
步骤3电缆提升装置跟随接口区域作出位姿调整;
步骤4当船舶完成靠泊时,电缆提升装置就会带动电缆实现船舶与岸电的精确对接。
对接系统总体流程如图4 所示。
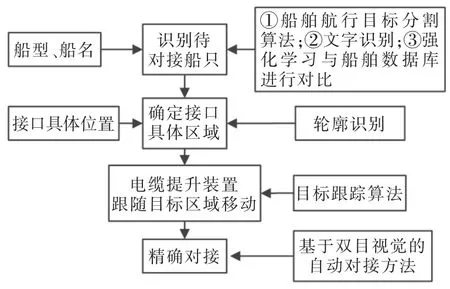
图4 对接工作流程Fig.4 Docking work flow chart
3 系统主要技术实现
3.1 确定目标船舶
在此所提及的新型自动化岸电对接方案中,首先需要以待对接的船舶作为目标船舶,通过摄像头所拍摄的画面,利用图像分割技术识别船舶轮廓,将船名、船号等作为辅助信息来确定该船舶。由于摄像头广角较大,可拍摄范围较广,且码头上不止一艘船舶通过与停靠,可能会出现多艘船舶同时入镜的情况,因此对识别的准确性有较高的要求。
根据交通运输部 《船舶靠港使用岸电管理办法》的规定,当船舶靠港时,船型、船舶识别号等信息会通过船岸交互系统发送给岸上,由以上信息即可对于目标进行分析处理。目标图像识别的结果会直接影响目标捕获成功与否,也影响到系统的可行性、经济性和实时性。
在此方案中,首先利用背景差分结合最大类间阈值法对船舶目标进行分割,然后对分割后的目标图像进行形态学开闭运算处理,最终得到目标船舶图像[5]。经过计算机处理分析后能够在众多船舶中确定需要进行岸电对接的特定船只,实现初步的自动化过程。图像处理流程如图5 所示,岸边摄像头捕捉目标船只示意图如图6 所示。

图5 确定目标船舶流程Fig.5 Determine the target ship flow chart

图6 岸边摄像头捕捉目标船只示意图Fig.6 Diagrammatic sketch of target ship captured by shore camera
3.2 接口区域定位
在确定了待对接船舶之后,需要采用船舶边缘检测算法确定具体接口区域:利用船舶受电设施的布置和主要技术参数信息,经过边缘检测后按照当前候选区域的尺寸比例进行区域选择性搜索。船舶边缘检测的流程如图7 所示。

图7 确定接口位置流程Fig.7 Flow chart of determine interface location
图像边缘检测的原理是标识数字图像中灰度值梯度变化的点,并剔除分析认为不相关的信息,此方法保留了图像重要的结构属性[6]。在此采用边缘检测方法可以得到船舶图像的结构信息,并在已知船舶受电接口位置区域的情况下,精准地定位到接口的具体位置,便于电缆提升装置准确跟踪目标运动。
3.3 电缆提升装置跟随接口区域移动
电缆提升装置将通过目标自动跟踪算法跟随已定位的接口区域进行位姿的变换,以实现船舶完成靠泊后快速及时地进行对接。目标自动跟踪系统流程如图8 所示。

图8 目标自动跟踪系统流程Fig.8 Flow chart of automatic target tracking system
在控制电缆提升装置跟随目标船舶接口区域移动时,选用连续自适应平均值迁移CAMShift(continuously adaptive mean shif)算法,在这个过程中运用该算法可实现对于目标船舶受电装置接口的连续跟踪,通过识别岸电受电接口在岸边摄像头的视频图像中所在的位置和大小,置于下一帧视频图像中,利用以上信息初始化搜索窗口,可以使目标船舶受电接口始终处于图像中心[7]。
图像处理单元首先在摄像头视场范围内选择要跟踪的目标接口,将接口的图像通过视频数据线传输到计算机内的图像采集卡中。然后,根据运动目标跟踪算法确定船舶位置和大小,计算出船舶的纵向和侧向偏转角(基于图像的目标自动跟踪系统),将位姿的变化作为控制量控制电缆提升装置,保证摄像头跟踪船舶的运动,使船舶受电接口始终位于摄像头的视场中心。
在自动化岸电对接系统中采用目标跟踪算法,可以使电缆提升装置一直跟随船舶受电接口运动。当船舶靠岸后,电缆提升装置会带动电缆,使其在最优状态下接近船舶的受电接口,最大幅度地缩短对接过程所需要的时间。
3.4 精确对接
停泊状态下进行的精确对接,选用基于双目视觉的自动对接方法。该方法利用伸缩托盘实现电缆与船舶受电装置的对接工作。在对接工作开始后,电缆提升装置利用图像识别技术对托盘卡口进行识别,并获取卡口的位姿信息;得到伸缩托盘卡口的位姿信息后,电缆提升装置将电缆接口放置在托盘上,并利用托盘卡口进行固定;船舶受电装置利用伸缩托盘,将电缆接头送至受电口,实现电缆与船舶受电装置之间的精确对接。该对接过程如图9所示。
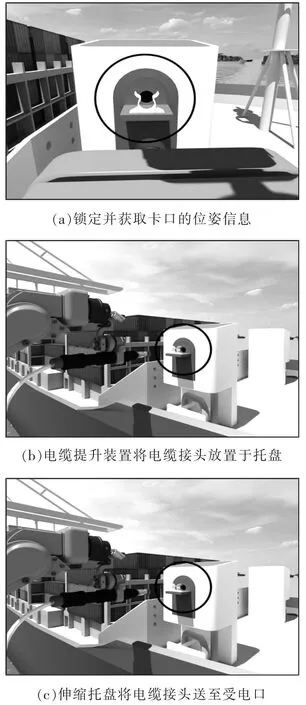
图9 精确对接过程Fig.9 Precise docking procedure
基于双目视觉的自动对接方法,利用电缆提升装置搭载的带有滤光片的摄像机,获取带有颜色标志的卡口图像。对图像进行灰度化、二值分割、中值滤波等处理,再根据基于区域生长的连通区域标记法,提取图像中标志成像区域的质心作为特征点,利用改进的HAAR 小波变换描述法对左、右图像特征点进行立体匹配[8]。
最后,运用双目视觉原理求取标志在世界坐标系中的三维坐标,并采用最小二乘法对三维坐标进行空间拟合,进而获取卡口的位置和姿态。图像分析与识别流程如图10 所示。
4 新型自动化岸电对接系统主要特点
新型自动化岸电对接系统,基于尽量保留船舶原有外形与设备的原则,综合吸收了一些国外最新自动化对接系统的优点,其主要特点如下:
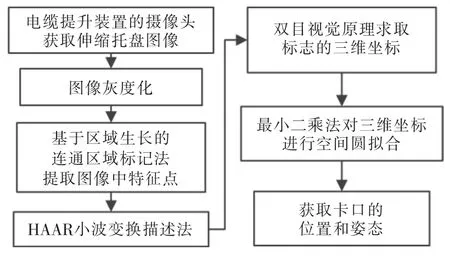
图10 图像分析与识别流程Fig.10 Flow chart of image analysis and recognition
(1)形成完整的全过程自动化对接框架。
新型自动化岸电对接系统从船舶驶入摄像头监视范围内便启动运行,直至船舶驶离泊位,可以实现全程自动化控制,脱离人工操作,能够保障工作人员的安全,增强系统可靠性,并且大幅度降低了人工成本与停泊成本。
(2)解决恶劣气候时图像识别效果差的问题。
图像分割的过程中,时间因素的影响是不可忽视的。一般地,对于图像分割技术,正午时阳光强度大,能见度高,分割效果较好;早晨雾气较重,傍晚阳光减弱,皆会造成能见度降低,使部分分割目标边缘较为模糊。该系统运用背景差分结合最大类间阈值法对船舶运动目标进行提取,可以有效地对不同船型、不同天气、不同角度所拍摄船舶进行目标分割;基于圆环划分特征、矩形分块面积比向量等特征值,具有平移、旋转、缩放不变性;可对散货船、危险品船和集装箱船等主要在航船舶图像特征进行有效提取,并具有一定的天气适应性。
(3)提高对接的及时性。
对接过程中,为节省时间、提高工作效率,提出了运用目标跟踪技术结合CAMShift 算法控制摄像头的随动。在船舶进行靠泊的同时,摄像头带动电缆提升装置向船上的受电口进行靠近;当船舶停稳后,电缆提升装置到位即可直接进行精确对接,节省了等待船舶完成靠泊的时间。目标跟踪中采用CAMShift 算法,在每次搜索前将搜索窗口的初始值设置为运动目标当前的位置和大小,搜索窗口在运动目标可能出现的区域附近进行搜索,由此节省大量的搜索时间,使其具有良好的实时性。
(4)利用伸缩托盘结构降低船舶改造成本,提高准确性。
该系统的对接引导装置采用了安装在船舶受电接口上的伸缩托盘结构,由安装在电缆提升装置上的摄像头锁定托盘位置进行对接操作。该伸缩托盘安装简易,且配合电缆提升装置操作准确性更高,相比于国外的一些方案,安装此设备并不需要对于船体结构进行巨大的改动,大幅减少了使用岸电的成本与对接时间。
5 结语
船舶岸电系统有着良好的环境效益和发展前景,对促进我国低碳交通以及环保事业的发展具有重要意义。所提出的自动化岸电对接方法大大缩短了岸电系统与船舶的对接时长,同时降低了使用岸电的成本,对于港口及船东的作业和使用成本大有裨益。通过此方法,以期能够促进船舶岸电系统的应用,减少港口水域污染、实现绿色发展。
猜你喜欢
中国交通信息化(2022年9期)2022-10-28
汽车工程师(2021年12期)2022-01-18
军事文摘(2021年16期)2021-11-28
建材发展导向(2021年14期)2021-08-23
铁军(2020年3期)2020-04-17
趣味(数学)(2019年12期)2019-04-13
影像视觉(2019年2期)2019-03-04
摄影之友(2018年12期)2018-12-26
摄影之友(影像视觉)(2018年4期)2018-05-07
领导决策信息(2017年12期)2017-05-17
