低空通航飞行计划预先调配方法研究*
2020-07-27 06:45张洪海钱晓鹏许卫卫王立超
武汉理工大学学报(交通科学与工程版) 2020年3期
田 宇 张洪海 钱晓鹏 许卫卫 王立超
(南京航空航天大学民航学院 南京 211106)
0 引 言
通用航空飞行计划是从事通用航空飞行活动的单位、个人实施飞行前应当向有关飞行管制部门提交的申请文件.飞行计划具体规定了航空器的飞行任务性质,飞行航线或范围,预计飞行开始、结束时间,飞行高度等.飞行计划的调配应当满足任务优先级,预先消解飞行冲突,起到保证飞行安全的作用.目前,如何根据飞行计划实现预先调配,相关研究并不多.程晓航等[1]利用模糊综合评判模型给出军航飞行预先调配对象评估与排序的综合决策方法;张家铭等[2]建立多直升机多起降点的数学规划模型,基于任务优先级提出航线交叉点的处理方案,解决了多架救援直升机的起飞时序规划问题;张威[3]利用栅格技术综合处理冲突识别和冲突调解,提出了一种改进的飞行计划调配方法.唐志星等[4]针对军民航之间的空域领过使用问题,提出预战术阶段的临时空域空中交通流量分配模型,平衡军民航空域需求,并且提高空域利用率.在民航航路方面,王兴隆等[5]建立时隙—高度层协同分配模型,实现了航路时隙和高度层的协同分配; Liang等[6]提出一种飞行序列分配模型,最大限度地降低惩罚总成本;Zhou等[7]提出了改进的航路交叉口集合调度模型,对交叉口航班的加权有效地划分了优先级层次,完成了入境航班排序和时隙分配的快速计算;Chen等[8]提出了一种新的动态随机整数规划模型和空中交通进场时隙分配模型,为单个航班提供更准确的时间表;张洪海等[9]依据先到先服务原则建立了空中交通流局域排序模型;Zhang等[10]提出基于航路、航路点和机场组成的航路空中交通系统模型,解决了航路调度问题.
基于实际情况和研究现状,本文研究同一高度层的飞行计划预先调配问题.首先将空域栅格化,并将飞行计划中飞行作业区域或飞行航线与空域栅格关联,然后从飞行计划任务性质优先级、累积等待时间、预计占用空域时间三个维度确定计划的综合优先级,建立栅格化空域下基于综合优先级的低空空域分配模型,实现空域的优化分配.
1 问题分析与建模
1.1 空域栅格化方法
栅格化分析方法是把区域细化到以平方公里或者更小区域进行规划优化分析的方法[11],每个栅格对应一个特定的空间位置,栅格的标识常用两种方法:①坐标系法 建立直角坐标系,每个栅格用直角坐标表示;②编号法 按照一定的规则对每个栅格用序号表示.栅格的尺寸直接影响了空域的精度和分析结果的可靠性,如果栅格设置太小,会增加矩阵维度,增加计算难度;如果栅格设置过大,会使得空域的利用率不高[12-13].
本文采用坐标系法对栅格进行标识,将空域划分为I行J列的矩形网格结构,见图1,对每一个栅格编号为aij,根据经验,栅格大小可以根据航空器飞行速度和调配周期的设定进行选取.
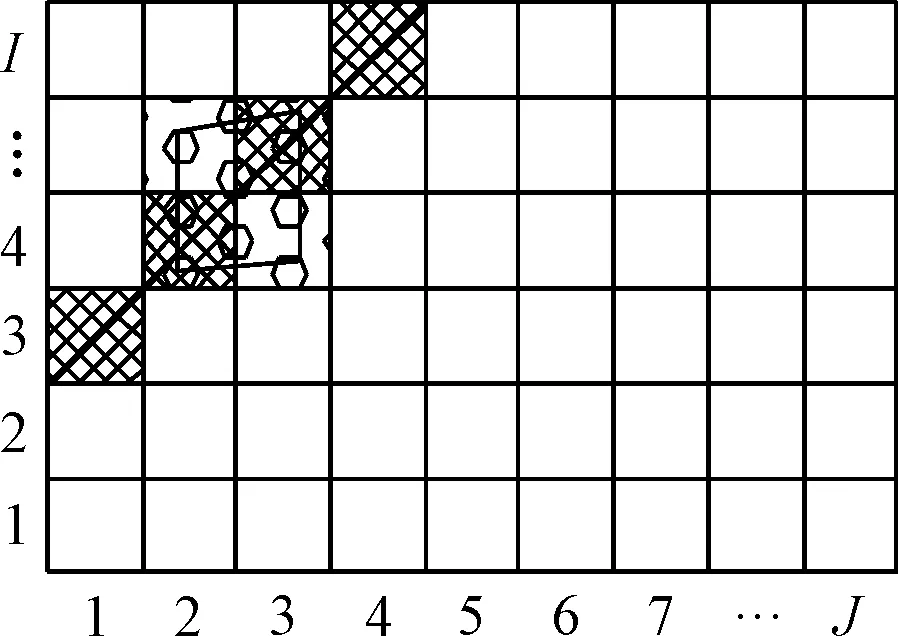
图1 空域栅格化示意图
1.2 飞行计划与空域栅格关联方法
飞行航线或范围是飞行计划的重要组成部分,在确定空域栅格之后,采用一定的方法将飞行航线与空域栅格关联起来[14].第一步是将飞行计划中飞行航线或作业范围的经纬度标记在坐标系中,第二步是判断航线与栅格空域的位置关系,相交的栅格或环形内部的栅格标示为该飞行计划所占用空域,第三步将飞行时间与占用时间关联.具体表示方法为
引入I×J维空域初始矩阵B0,表示调配初始时空域内栅格aij的占用情况,矩阵表示为
式中:
引入I×J维飞行计划占用空域矩阵Bk,为第k个计划对栅格aij的占用情况,矩阵表示为
式中:bkij为第k个计划对栅格aij是否占用.
引入飞行计划占用时间集合Tkij,定义Tkij为第k个计划对栅格aij的占用时间情况.

1.3 计划综合优先级确定
计划的任务优先级属性主要通过飞行任务性质来衡量.通用航空飞行涉及到多种飞行任务,某些任务由于其对时间的要求高,需要优先考虑.

其他普通飞行任务均取值0.
2) 累积等待时间属性wt相比于任务优先级属性,累积等待时间属性是影响通航用户体验的关键因素,每次分配都首先允许任务优先级高的计划通过,使得高优先级的计划等待时间短.但是如果高优先级的计划数量很多,那么高优先级的计划就一直被服务,对于其他计划就很不公平.针对这种因任务优先级不同而导致的不公平现象,增加累积等待时间属性.
(1)
式中:a>0为调节参数;tw为累积等待时间.易知atw≤ln2进而得到atw≤ln2/wtmax,取值范围为(0,ln2/wtmax].
3) 预计占用空域时间属性ut相比于任务优先级属性和累计等待时间属性,预计占用空域时间是影响空域运行效率的重要因素,当某一时间段预计飞行量比较大,优先考虑预计占用空域时间小的计划不仅使得更多计划通过审批,还有助于提高空域效率.类似于累积等待时间属性,本文采用以下函数来表示预计占用空域时间属性:
(2)
式中:b>0为调节参数;tu为预计占用空域时间.
综上,本文得出计划的综合优先级.
(3)
(4)
式中:0≤w1,w2,w3≤1,w1+w2+w3=1.
1.4 飞行计划预先调配模型建立
本文不考虑航空器飞行时空位置的随机扰动以及其在实时飞行过程中产生的冲突与解脱能力及碰撞风险,从飞行计划预处理实际出发,依据各用户提供的飞行计划进行预先调配保证飞行安全,优先考虑计划的综合优先级,设置总体综合优先级最高为目标函数,建立一种飞行计划预先调配模型如下.
s.t.
(5)
(6)
(7)
(8)

式(5)为栅格时间占用约束,新计划的占用时间不得与已占用的时间重叠;式(6)为栅格占用约束,对于每个栅格,同一时段仅有一个计划占用;式(7)为综合优先级约束;式(8)为决策变量约束.
2 求解算法
飞行计划预先调配是将待分配计划按照综合优先级大小排列依次判断占用空域栅格情况,各占用空域不重叠,直到不能分配任何一个计划.设计低空空域分配算法见图2.
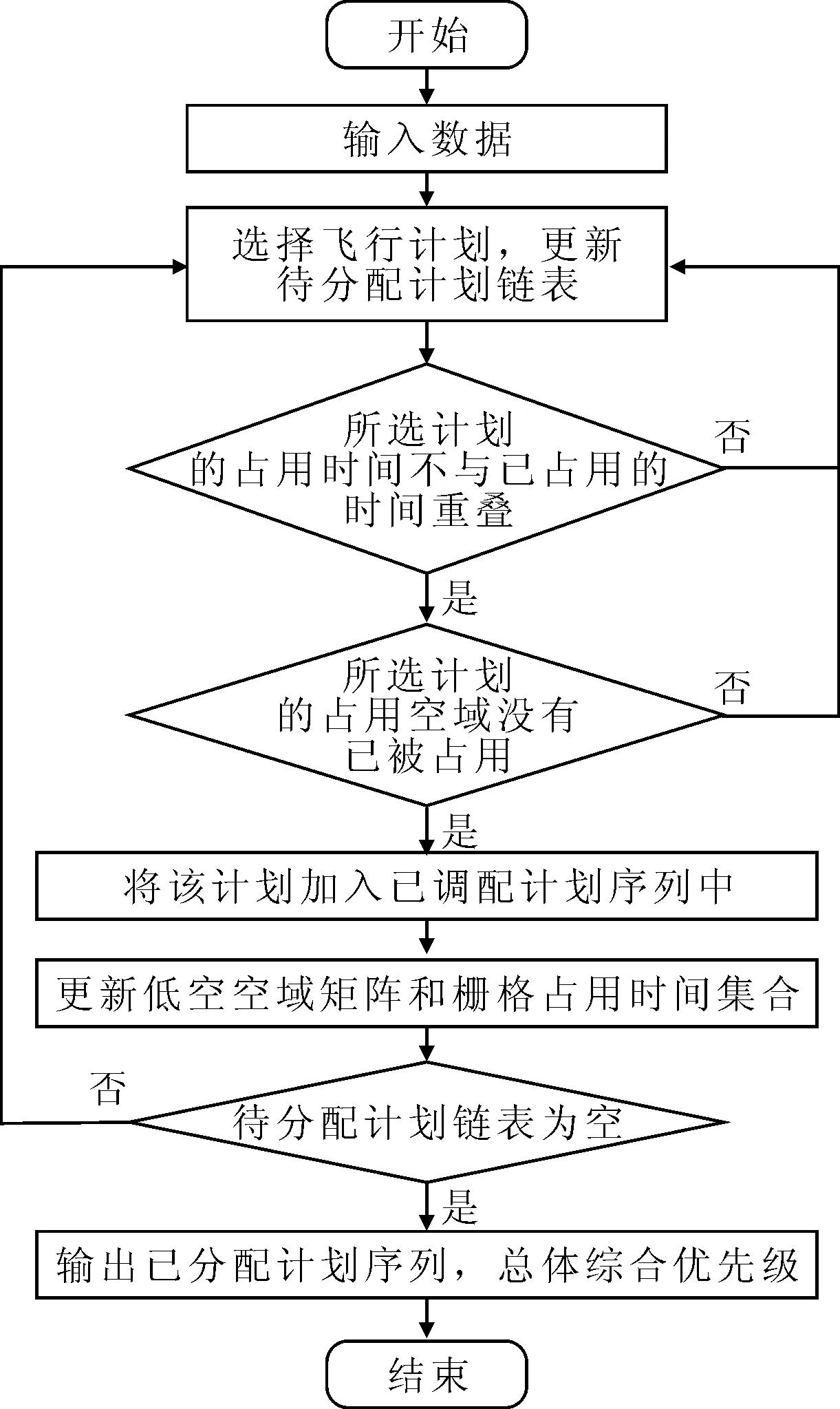
图2 飞行计划预先调配流程
3 模拟计算与结果分析

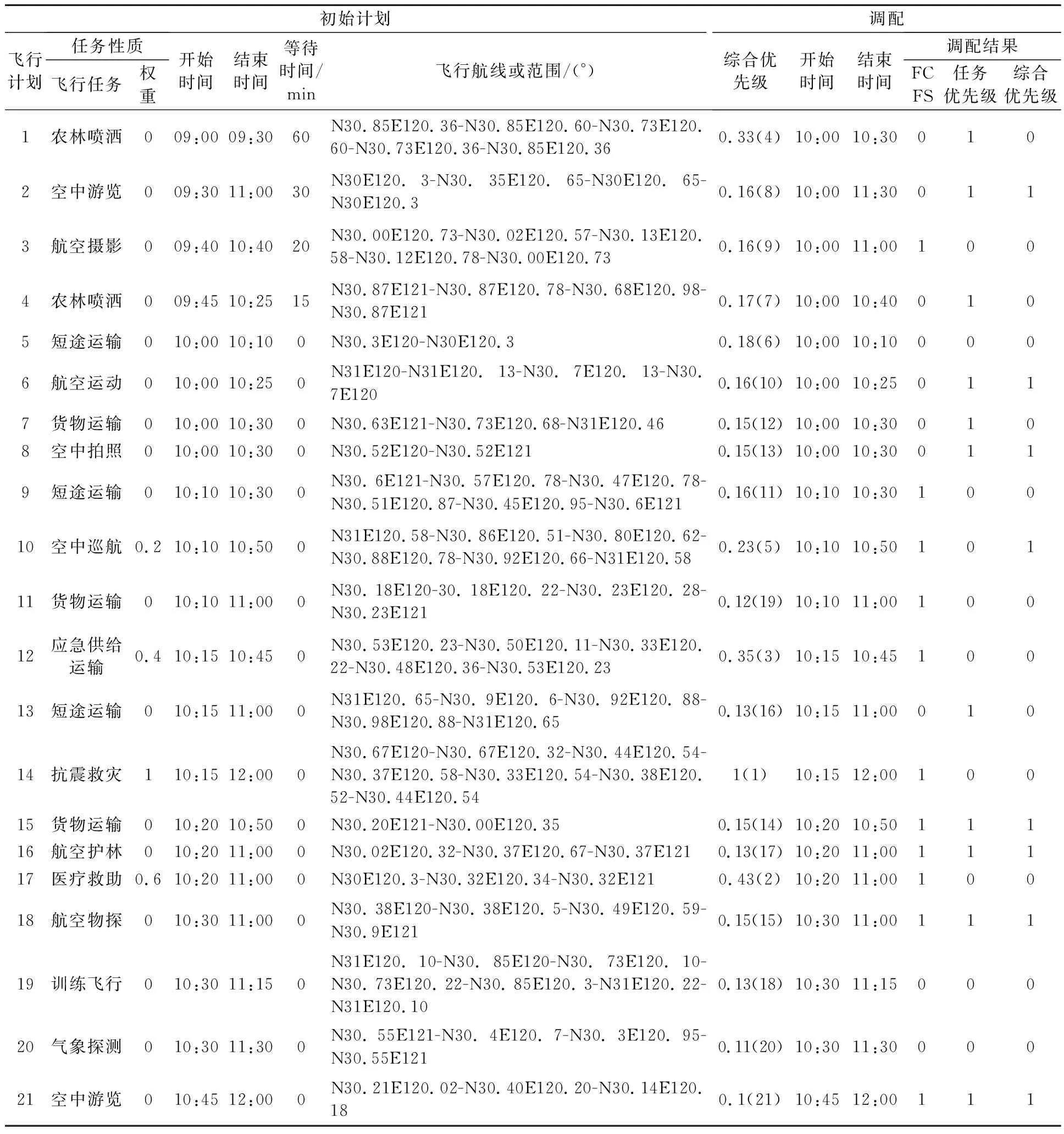
表1 飞行计划预先调配算法算例
本文按照经纬度每0.05°栅格化为20×20的网格结构,飞行航线或作业范围穿过网格即记为占用本网格,分配结果见图3.

图3 FCFS与综合优先级调配算法对比图
下面对本算例得到的三种结果在以下三个方面进行对比.
1) 综合优先级利用率 获得批准的飞行计划的综合优先级之和占所有飞行计划综合优先级之和的比率.
2) 飞行计划批准率 获得批准的飞行计划数量占所有飞行计划量的比率.
3) 空域利用率 获得批准的飞行计划在10:00—11:00时段内占空域总占用需求的比率.
对比结果见图4.
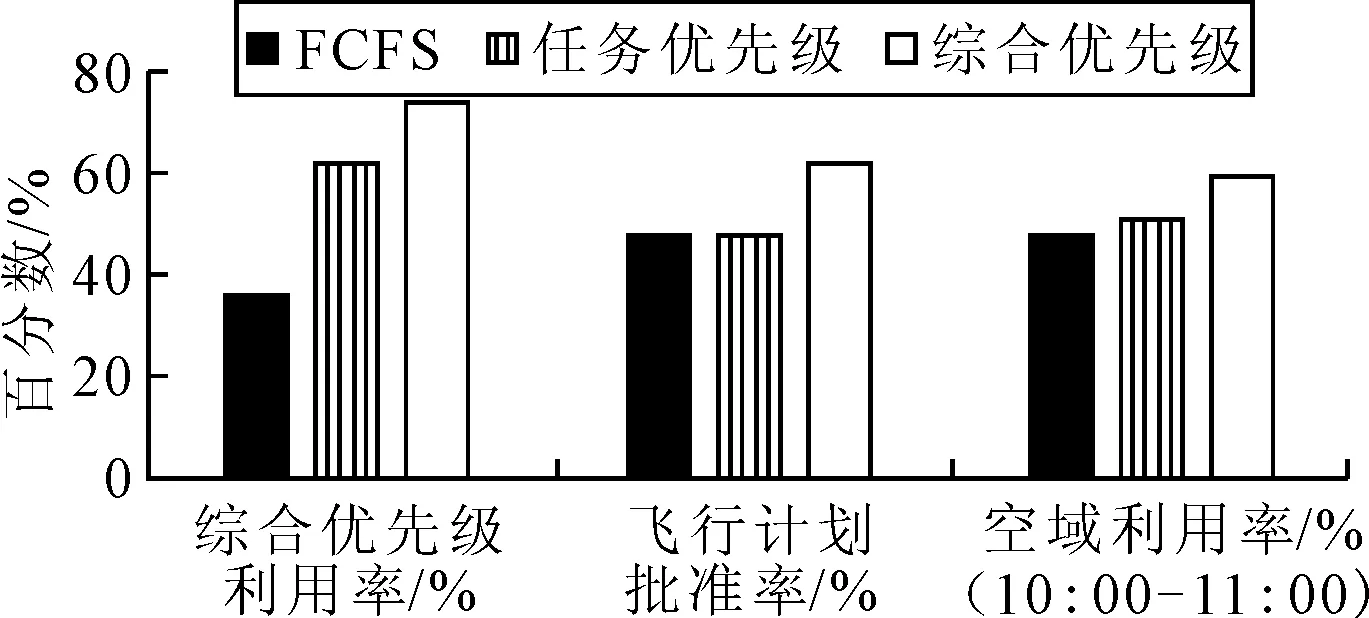
图4 三种调配算法结果对比
由图4可知,本文提出的基于综合优先级的调配方法较基于FCFS的调配方法在综合优先级利用率、飞行计划批准率、空域利用率分别提高37.64%,14.29%,12.50%,较基于任务优先的调配方法分别提高11.83%,14.29%,9.55%.本文提出的综合优先级的调配方法是一种改进的调配方法.综合优先级利用率最大,兼顾了通航用户满意度和空域运行效率;飞行计划批准数量增加,使得更多的用户获得空域使用权;空域利用率提高,提高了系统的经济效益和社会效益.
4 结 束 语
本文在空域栅格化并与飞行计划关联的基础上,考虑飞行任务性质、累计等待时间和预计占用时间,提出飞行计划综合优先级的确定方法,并且建立基于综合优先级的飞行计划预先调配方法.经算例分析,结果表明与基于FCFS的调配方法和基于任务优先级的调配方法相比,本文所提出的方法能够使得综合优先级高的计划获得优先批准,同时兼顾了通航用户满意度,提高了计划的批准率和空域利用率.本文目前仅选择了综合优先级作为分配的评价标准,具有一定的局限性.在接下来的研究中,将考虑多种因素的影响进而改进飞行计划预先调配方法.
猜你喜欢
重庆理工大学学报(自然科学)(2022年1期)2022-02-18
煤气与热力(2021年12期)2022-01-19
北京航空航天大学学报(2021年5期)2021-06-09
有色设备(2021年4期)2021-03-16
商业评论(2020年3期)2020-06-15
大科技·C版(2018年11期)2018-10-21
家庭影院技术(2018年1期)2018-04-28
汽车文摘(2016年1期)2016-12-10
视野(2015年14期)2015-07-28
读者(2015年12期)2015-06-19