
《机械设计基础》教学实例探讨
2020-07-18 16:07滕兵
锋绘 2020年4期
滕兵
摘 要:创新的基础是扎实的功底和严谨的科学态度,教师在授课中应向学生传递出此种观念。《机械设计基础》作为近机类的主业基础课之一,在倡导创新教学的环境下,亦应保证教学基础内容的严谨性及透彻性,结合教學工作中的实例,着重讨论轮系传动比计算中的正负号意义及应用。
关键词:周转轮系;复合轮系;传动比;转向
2017年教育部提出了“新工科建设”的要求,历经三年,取得了丰硕的成果,对于教学一线的高校教师而言,问学生志趣变方法,创新工程教育方式与手段是研究最多的内容,个人在研究创新教学方法过程中不断反思,认为教学方法、培养模式应不断改革创新,但授课教师的授课基本功也应不断加强训练。在教学过程中偶得一例,与同事颇有不同意见,在此写出供同道中人斧正。
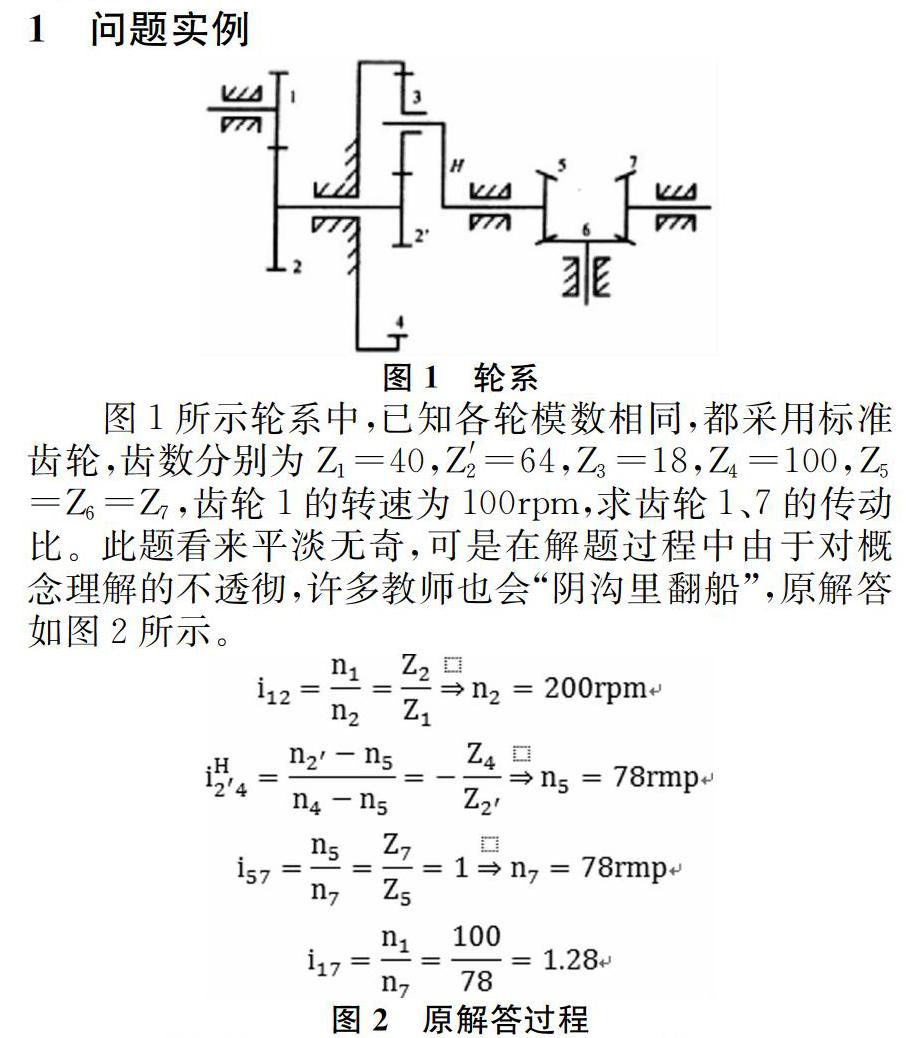
1 问题实例
图1所示轮系中,已知各轮模数相同,都采用标准齿轮,齿数分别为Z1=40,Z′2=64,Z3=18,Z4=100,Z5=Z6=Z7,齿轮1的转速为100rpm,求齿轮1、7的传动比。此题看来平淡无奇,可是在解题过程中由于对概念理解的不透彻,许多教师也会“阴沟里翻船”,原解答如图2所示。
此解答粗看无甚问题,但是细究之下暴露出基础知识的不扎实或授课的不严谨,众所周知轮系不仅能改变输出轴的转速,也可以进行动力的分配以及改变输出轴的转向,而此题的求解过程只针对了传动比的大小,而忽略了传动比的方向。
2 问题分析
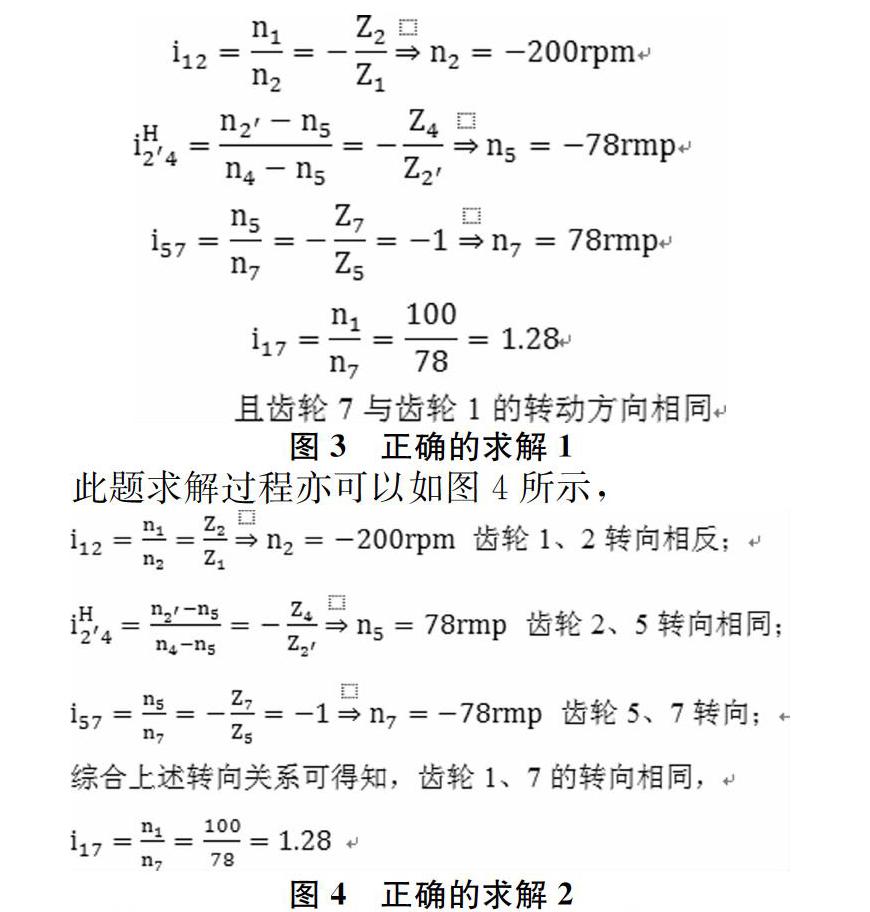
对于轮系转向的判断公认有两种标识方式,一种是通过正负号表示,此种方法仅限于输入输出两轮的轴线相平行(或重合)时;另一种就是通过画箭头标识各轮转动方向,然后通过文字表述出输出轴的转动方向,这种方法仅限于定轴轮系。图1中的轮系为复合轮系,由齿轮1、2组合的定轴轮系,混合齿轮2′、4、3及行星架H组成的周转轮系,再混合上齿轮5、6、7组成的定轴轮系所形成的,所以在计算传动比的时候三部分轮系应各自计算出传动比的大小以及分析出各自的转动方向(或转动关系),基于以上的分析,图1中复合轮系的正确求解过程应如图3所示,通过比较可以看出,图3所示的求解过程利用正负号表示了输出轴的转向关系,需要特别注意的是这里的转向关系均是以齿轮1的转向为标定标识的,以齿轮5为例,表示意义为齿轮5的转速为78rmp,方向与齿轮1的转向相反。
此题求解过程亦可以如图4所示,
此解法不被大多数教师接受,为此争论多时,问题的关键出现在齿轮5的转速n5=78rmp上,持否定意见的教师认为此处错误,个人的观点是,图4所示解法中,转速中的正负号表示的是各分解轮系中的齿轮转向关系,如齿轮5的转速数值为78rpm,仅意味着齿轮5的转向与输入齿轮2的转向相同,所以图4的解法也是正确的。
3 总结
继承创新,只有在继承的基础上才能有创新,创新不可是无根之木、无源之水,希望一线教师尽力做好教学工作,将知识讲解透彻的基础上,通过发散教学培养学生的综合素质。
参考文献
[1]杨可桢,程光蕴等.机械设计基础(第六版)[M].高等教育出版社,2013:79-82.
[2]陆宁,樊江玲.机械原理(第二版)[M].清华大学出版社,2012:70-72.
[3]孙桓,陈作模.机械原理(第七版)[M].高等教育出版社,2006:176-177.
猜你喜欢
机械设计与制造(2021年7期)2021-07-26
潍坊学院学报(2017年2期)2017-04-20
学理论·下(2016年11期)2016-12-27
山东工业技术(2016年23期)2016-12-23
北方文学·下旬(2016年9期)2016-12-20
都市家教·下半月(2016年10期)2016-11-30
职业(2016年10期)2016-10-20
考试周刊(2016年79期)2016-10-13
大学教育(2016年9期)2016-10-09
湖南大学学报·自然科学版(2014年2期)2014-12-25