高分七号卫星激光测高仪激光器设计
2020-07-15 09:35孟俊清张鑫蒋静吴姚芳谢可迪魏森涛王晋伟王志君陈卫标
航天器工程 2020年3期
孟俊清 张鑫 蒋静 吴姚芳 谢可迪 魏森涛 王晋伟 王志君 陈卫标
(中国科学院上海光学精密机械研究所 空间激光通信及检验技术重点实验室,上海 201800)
高分七号(GF-7)卫星搭载的激光测高仪主要用于星下广义高程控制点的测量,协同立体测绘相机工作完成1∶10 000比例尺测绘。测高仪包含2个波束,每个波束为独立发射的一台激光器,为了提高系统可靠性,每个波束还冷备份了一台激光器,因此测高仪安装了4台激光器。测高仪对激光器提出的主要技术要求包括激光脉冲能量达到180 mJ和激光的重复频率为3 Hz。为了在有限发射口径下实现小的激光足印,对激光光束质量因子(M2)提出了小于2.5的要求。此外,卫星在轨工作时间长达8年,对激光器的寿命要求也是截至目前最长的。与国内外同类的空间激光器相比,GF-7卫星测高仪的激光器指标要求都是比较高的。
激光器用于空间探测可以追溯到20世纪70年代,美国阿波罗15号(Appolo-15)上首次搭载了基于红宝石激光器的激光测距仪[1]。早期的空间激光器都是以闪光灯为泵浦源的固体激光器,随着20世纪80年代末期大功率激光二极管技术的进步,泵浦源被激光二极管替代。世界上第1台空间全固态激光器是1992年NASA发射的火星探测器搭载的火星观测者激光高度计(MOLA)[2]。中国的第1台空间全固态激光器是2007年发射的嫦娥一号所搭载的激光高度计激光器,该激光器采用的是激光二极管(LD),阵列侧面泵浦Nd:YAG电光调Q技术路线。在随后的嫦娥二期工程中,除了搭载用于测距的全固态激光器外,还搭载了用于对着陆区三维地貌进行成像的光纤激光器。在对地观测方面,NASA在2003年发射了“冰卫星”(ICESat),卫星上搭载了地球科学激光高度计系统(GLAS)[3],主要用于监测两极的冰盖厚度变化,同时也可测量大气气溶胶和云。GLAS采用的激光器是基于LD泵浦的被动调Q板条激光器,同时输出1064 nm和532 nm的激光脉冲。NASA还于2009年发射了用于探测大气气溶胶的“云-气溶胶激光雷达和红外开拓者卫星观测”(CALIPSO),该激光雷达采用的是单级振荡输出的电光调Q板条激光器,经过倍频后同时输出532 nm绿光和1064 nm基频光[4]。2018年NASA发射了ICESat-2任务,其上搭载了基于光子计数法测高的先进地形激光高度计系统(ATLAS)[5],该载荷的激光器采用了主振荡器+功率放大器(MOPA)结构,其中振荡器采用LD端面泵浦的电光调Q单频激光器。同样是2018年,ESA发射了“风神”(Aeolus)卫星,搭载了首个全球风场测量的大气激光多普勒雷达(ALADIN),该载荷采用的激光器是基于MOPA结构的单频紫外Nd:YAG激光器[6]。
GF-7卫星测高仪激光器从2015年开始研制,最终交付了2个波束共4台飞行件激光器(每个波束包括1台主份、1台冷备份)。本文主要介绍了该激光器的设计思路和设计结果,该设计方案可用于深空探测、对地观测及机载激光测距等领域的激光器。
1 激光器设计
测高仪对激光器提出的主要技术要求如表1所示。按照这些技术要求,采用嫦娥一号激光测高仪激光器的技术路线,尽管能够在输出能量上满足要求,但是由于嫦娥一号测高仪激光器的LD是弧形封装的,封装采用的是软焊料,因此寿命无法满足要求。此外,嫦娥一号激光测高仪激光器采用单级振荡器,光束质量也很难满足要求。因此,GF-7卫星测高仪激光器采用一级振荡器+两级放大器的技术路线,激光器的组成框图如图1所示。

图1 激光器组成框图Fig.1 Constitution of laser transmitter
每台激光器包括激光器光学头部、激光驱动电子学组件和激光控制器三部分。4台激光器头部独立安装,4台激光器的驱动器之间完全独立,每个激光器都有完整的控制器和LD驱动器。在实际使用中,将全部4台激光器的驱动电子学分为2个结构安装,一个是激光控制器,一个是激光驱动电子学组件。
激光器每一级的增益介质均采用Nd:YAG板条,这样可以使用工业上大量应用的G封装的LD阵列进行泵浦。这种G封装的LD阵列普遍采用金锡焊料进行封装,寿命可达1×109甚至1×1010次,完全能够满足任务的寿命指标要求。此外,采用之字形板条作为增益介质,可以减小热效应对光束质量的影响,提高激光光束质量。首先,以小能量的振荡级实现激光光束M2在1.5以内,再通过两级之字形板条放大器实现180 mJ激光脉冲能量,并将激光光束M2控制在2.0以内。激光器的光路示意如图2所示。
为了防止真空下有机挥发物对激光光学元件表面造成污染,激光器的光学头部采用密封设计,内部气压维持在0.12 MPa,并在内部安装压力传感器对压力进行监测。
图3为交付正样飞行件的4台激光器光学头部。图4(a)为交付正样飞行件的激光驱动电子学组件,内部包含4台激光器的振荡级和预放级驱动电路;图4(b)为激光控制器,包含所有4台激光器的二次电源和主控,以及主放级驱动电路。交付的4台激光器的主要性能指标如表2所示。

图2 激光器光路示意Fig.2 Schematic of laser optical layout

图3 激光器光学头部正样飞行件Fig.3 Photograph of flight lasers optical head
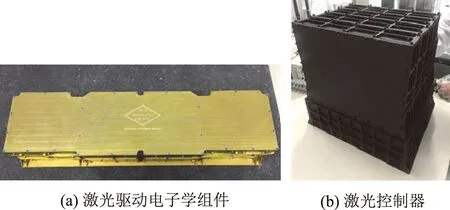
图4 激光电子学正样飞行件Fig.4 Photograph of flight laser electronics part
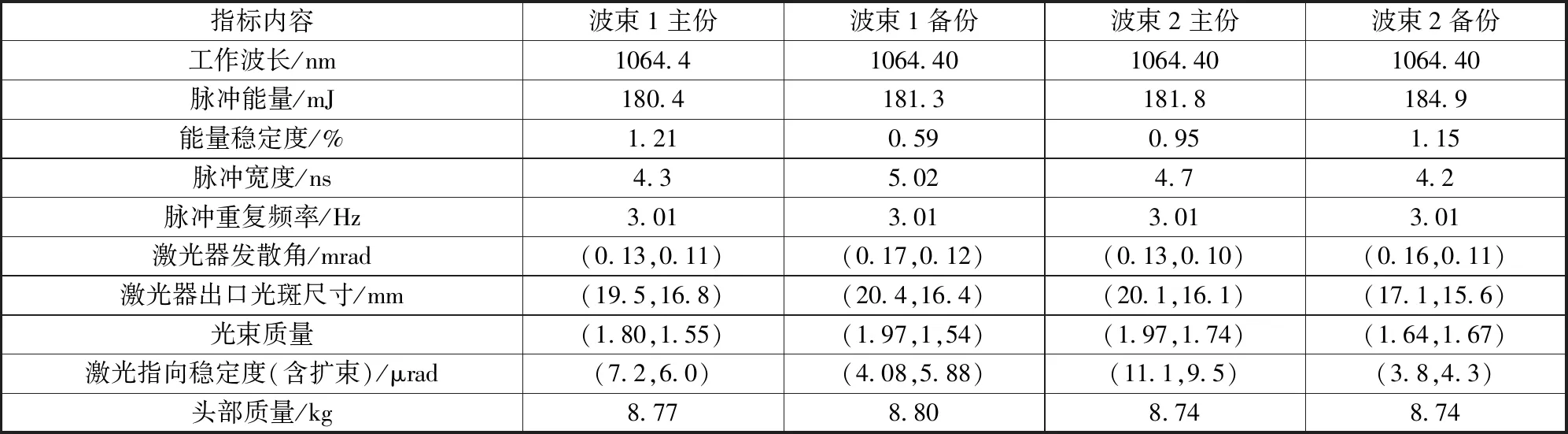
表2 交付时4台激光器的主要性能指标Table 2 Main parameters of 4 flight lasers
激光器光学头部采用主振荡-功率放大结构,下面分别对激光器光学头部各部分设计进行介绍。
1.1 振荡级
振荡级谐振腔采用的是正交双Porro棱镜直线腔,腔长约10 cm。采用正交双Porro棱镜腔,可以使激光器在2个正交方向上都能获得良好的抗失谐性[7]。激光晶体采用面泵浦的之字形薄板条,2个端面均切割为布儒斯特角。为了提高泵浦光的吸收率,在远离泵浦光的另一个大面上镀有808 nm高反膜,这个面同时作为晶体与热沉的焊接面,这样可以使晶体的温度梯度对光束质量的影响最小。激光利用偏振分光镜(PBS)偏振耦合输出,耦合输出率约为80%。振荡级采用的泵浦源为双巴的LD阵列,每个LD巴条的峰值功率都可以达到150 W,实际工作降额至约90 W,泵浦脉宽为200 μs。得益于卫星热控技术的进步,采用环路热管对激光器进行热控,可以将激光器工作的中心温度T0(约为20.0 ℃)控制在-1.5~+1.5 ℃。所选用的LD阵列波长-温度漂移系数约为0.25 nm/℃,在工作温度范围内的波长漂移量低于1 nm,因此激光器内没有再对振荡级LD单独进行主动温控。为了保持4台激光器的工作温度一致,对LD进行筛选,挑选出在20.0 ℃、100 A工作电流下波长在807.0 nm±0.2 nm以内的LD阵列进行装机,这样可将4台激光器的中心工作温度差异控制在1.0 ℃以内。振荡级采用Cr4+:YAG晶体被动调Q,所选择的初始透过率为35%~40%。采用被动调Q,一方面,可以省略电光调Q所需的高压驱动电源,降低激光器的复杂度;另一方面,被动调Q具有纵模的自然选择性[8],这样可以使激光器在多数情况下单纵模运转。
振荡级的工作电流采用闭环控制。由于玻罗(Porro)棱镜的棱线不可能无限细,因此在Porro棱镜后方安装了光电二极管(PIN管),作为闭环控制的传感器探测由棱线漏出的激光。振荡级的初始电流设置为80 A,逐步增大电流,直到传感器探测到激光,将此时的电流作为阈值工作电流,并在此基础上增加1 A作为工作电流。
振荡级输出的脉冲能量约为2 mJ,脉冲宽度为3 ns,图5(a)是在距离振荡级输出端约10 cm处测得的近场光斑,图5(b)是采用焦距1.02 m的透镜聚焦后在焦平面处测得的远场光斑,振荡级输出的激光发散角为2.1 mrad,激光光束M2达到约1.3。
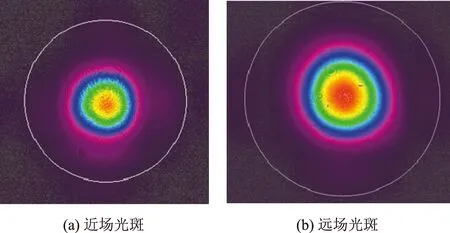
图5 振荡级输出光斑形状Fig.5 Beam profile of oscillator laser
1.2 预放级
振荡级输出的脉冲首先经过一个空间光隔离器,将振荡级光路与放大级隔离。经过隔离器后的激光偏振方向仍然为S偏振。然后,经过一个1.9倍的扩束镜对光束进行扩束,再经过PBS进入预放级板条。预放级板条是两端均为布儒斯特角的Nd:YAG之字形板条,截面尺寸为3 mm×3 mm,入射面镀有S光和P光双增透介质膜。S偏振的激光经过之字形板条后由0.57λ(λ为波长)波片和Porro棱镜组成反射镜将光原路返回,同时偏振方向旋转90°,以P偏振再次进入之字形板条进行放大,放大后的能量约为25 mJ。
预放级的LD为3组阵列,每组阵列4个巴条,同样每个巴条工作降额在约90 W。预放级LD以之字形板条的一个全内反射面为泵浦面,另一个全内反射面作为冷却面与热沉焊接。为了有效利用泵浦光,焊接面镀有808 nm的高反膜。
图6是采集的预放级近场输出光斑。可以看到:图6(a)中的近场光斑受到板条晶体轮廓的限制,近似方形,并且可以看到由于硬边衍射引起的条纹;图6(b)是在透镜焦平面采集的远场光斑,测试的输出激光能量为21 mJ,发散角为1.2 mrad,此时的激光光束M约为1.4。

图6 预放级输出光斑形状Fig.6 Beam shape after pre-amplifier
1.3 主放级
预放级的光斑经过2.5倍扩束镜,光斑达到约5 mm后进入主放级。主放级增益介质采用截面尺寸6 mm×8 mm的之字形Nd:YAG板条,泵浦面为之字形的全内反射点,这样获得较高的提取效率。本文设计共采用12个LD阵列(见图7),每个阵列6个巴条,每个巴条的最高功率为150 W,同样降额至约90 W使用。LD分为2组,每组6个模块,串联工作使用一个驱动电路,因此主放级LD采用2个LD驱动电路。主放级板条采用2个全内反射面为泵浦面,采用非泵浦面作为冷却面与热沉焊接,由于重复频率只有3 Hz,不会发生热累积,因此没有明显的热透镜效应。经过放大后的脉冲再经过4倍扩束镜,发散角压缩至约0.13 mrad后,再经过蓝宝石密封窗口输出。
主放级输出后经过4倍扩束镜盒输出窗口后的光斑如图8所示。可以看到:由于主放采用单通放大,2个方向的光斑尺寸不一致,近场光斑为椭圆形;主放输出后的经过4倍扩束镜的发散角为0.15 mrad,由于扩束镜次镜的硬边衍射效应,远场光斑边缘有类似拖尾现象;经过主放级后的激光光束M2的2个方向分别为1.55和1.79(见图9)。

图7 主放级泵浦结构示意Fig.7 Bock diagram of power amplifier
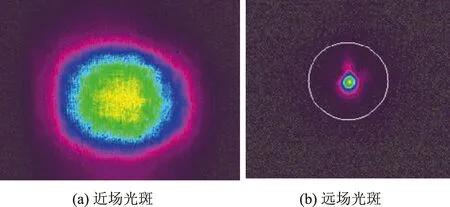
图8 主放级输出光斑形状Fig.8 Beam shape of final output
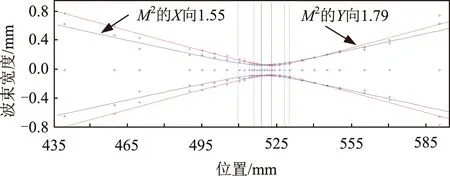
图9 主放级输出激光光束质量因子Fig.9 Output M2 of MOPA
2 激光驱动电子学
GF-7卫星测高仪激光器的激光电子学主要功能是:将输入电源转换为所需的二次电源,控制各级LD阵列的驱动电流,开启激光器,采集激光器的遥测量,监测激光器健康状态,并与测高仪控制器进行通信。激光器驱动电子学框图如图10所示。
激光器的二次电源包括39 V,5 V,±12 V和100 V。其中:39 V为激光器振荡级与预放级LD的储能电容充电共用电源,振荡级和预放级LD驱动电路为传统的恒流源电路,由FPGA输出电流控制信号,导通大功率场效应管(MOSFET),使储能电容对LD阵列放电。LD驱动电路的工作电流设置上限达到120 A,实际工作在约100 A。5 V电源为主控板数字电路供电电源。±12 V电源给能量探测以及各级恒流驱动电路供电。100 V电源为主放级LD的储能电容充电电源。主放级LD包含2路独立恒流源驱动电路,这2路驱动电路的电流控制信号为FPGA输出的同一个信号,并且共用一个100 V电源。100 V电源在激光器控制器上电后1 s内自动使能输出,输出电压可根据实际需要在一定范围内通过调压电阻的阻值调整,根据MOSFET的压降情况实际工作为95 V。
FPGA主控板含有一个软件配置项,由上位机通过参数设置指令控制激光器的各级工作电流。振荡级LD电流采用闭环控制,预放级和主放级LD电流为开环控制。FPGA主控板采集的遥测量包括激光器3级LD的热沉温度、激光器壳体温度、LD工作电流、LD电压、激光输出能量及壳体内部压力等。其中,5 V电源和振荡级LD温度作为遥测量直接送给卫星总控,其余15个模拟量测量值作为激光器内测量,所有监测的信号如表3所示。15个内测量中,温度的正常范围设定为10~30 ℃,超过此温度范围,判断为异常,软件会自动保护,激光器不能开启。同样,电压遥测也设定了正常范围,超出范围,软件会报告激光器状态异常,不能正常开机。由于激光器头部结构采用密封设计,并且要保证在轨8年,因此内置了一个压阻式精密压力传感器,测量灵敏度为0.01个标准大气压。

表3 激光器遥测信号Table 3 Laser telemetry signals
3 在轨测试情况
激光器2019年11月随GF-7卫星发射后,根据回波强度把在轨发射能量调整为约100 mJ。实际在轨运行激光器工作时的温度变化范围为-0.5~+0.5 ℃,说明激光器利用整星提供的良好热控能够保持稳定运行,不采用半导体致冷器(TEC)对LD进行主动温控的技术选择是正确的。激光器开机后各项遥测数据均正常,经过6个月的在轨运行,输出能量正常,见图11。这表明激光器的密封设计以及防污染措施有效,能够保证激光器的寿命满足任务需求。
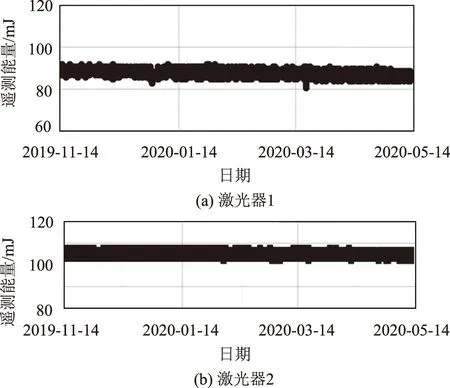
图11 激光器在轨6个月工作输出能量遥测Fig.11 Telemetering results of laser energy after operating 6 months in orbit
4 结束语
GF-7卫星测高仪激光器采用一级振荡器+两级放大器的MOPA结构的板条激光技术,实现了输出能量180 mJ,脉冲宽度4~5 ns,光束质量因子M2小于2的输出,4台激光器的输出能量稳定度均在1.2%以内。激光器在轨能量输出正常,并且输出光束指向达到亚微弧度量级,为测高仪全面实现既定测距指标奠定了基础。
猜你喜欢
制造业自动化(2022年9期)2022-10-03
量子电子学报(2022年3期)2022-06-10
阅读(科学探秘)(2022年5期)2022-06-07
奥秘(2021年3期)2021-04-12
阅读(高年级)(2019年9期)2019-11-15
VOGUE服饰与美容(2019年8期)2019-11-12
阅读与作文(小学高年级版)(2019年8期)2019-10-16
小资CHIC!ELEGANCE(2019年28期)2019-09-12
红领巾·探索(2014年1期)2015-03-16
微型计算机·Geek(2009年3期)2009-12-11