改进暗通道先验的航空图像去雾
2020-07-07 03:00韩昊男吕建威
光学精密工程 2020年6期
韩昊男,钱 锋,吕建威,张 葆*
(1. 中国科学院大学,北京 100049;2. 中国科学院 长春光学精密机械与物理研究所,吉林 长春 130033)
1 引 言
航空光电成像设备在外场工作时,不可避免地会受到天气的影响。在雾霾天气条件下,大气介质中悬浮着大量的水汽、尘埃等颗粒对大气中传播的光线进行散射和吸收,导致航空光电成像设备所采集图像质量下降。大气中浮质颗粒的降质机理主要包括:衰减和大气光。场景目标反射的光线在大气传播过程中将随着传播距离的增加而发生显著衰减;同时,大气中浮质颗粒的散射光线也将掺杂进物体的反射光线中,形成大气光。受这两种机理的影响,降质后的图像表现为:图像对比度降低,纹理模糊不清以及场景颜色的偏移。在雾霾天气件下捕获的航空图像,图像质量较差,不利于人眼的观察,也会影响到航空光电成像系统后端的定位、跟踪、识别等各类智能化技术的正常运行[1-3]。因此,研究图像去雾增强技术对提升图像质量,突破设备的使用天气条件限制及提高设备整体工作性能有着重要的研究意义和应用价值。
最近,单幅图像去雾方法取得了重大进展。颜色衰减先验(Color Attenuation Prior,CAP)[4]凭经验的观察发现有雾图像的亮度和饱和度之差和雾的浓度有相关性,其用亮度和饱和度之差来估计雾的浓度,经过学习的方法得到有雾图像的深度图,并用其来去雾。非局部先验(Non-Local Prior,NLP)[5-6]经过实验发现无雾图像的颜色可以在RGB空间中聚类,这些像素在雾的影响下会聚类成以大气光为原点的一条条雾霾线,在一条雾霾线中像素到大气光的距离和雾的浓度深深相关,用其进行去雾。He提出了一种基于暗通道先验(Dark Channel Prior,DCP)[7]的去雾方法。首先粗估计出原始传输图,然后利用软抠图原理[7]或者引导滤波[8]对原始传输图进行优化,该算法是常用的普遍去雾算法,许多去雾算法都是基于该算法提出的[9-16]。然而,这些方法存在一个共同的缺点,即去雾后图像容易产生光晕效应或者色彩严重失真现象。
本文依据暗通道先验原理,对大气光估计以及引导滤波进行了改进。通过对非重叠的暗通道使用四叉树细分的方法来求得更精确的大气光值,并对引导滤波提出一种自适应权重因子的方法对传输图进行优化以减弱光晕现象的问题。实验结果,该方法既能实现良好的去雾效果,又能改善暗通道先验针对大面积白色物体的适用缺陷,从而扩大了暗通道先验实现图像去雾的范围,并且可以减弱光晕现象。
2 暗通道原理
2.1 大气散射模型
在计算机视觉中,广泛应用于有雾图像的大气散射模型[17-19]为:
I(x)=J(x)t(x)-A(1-t(x)),
(1)
其中:x是像素坐标,I(x)是观察到的有雾图像,J(x)是无雾图像,A是全局大气光,t(x)是大气传输图。
2.2 暗通道先验
He等[7]基于对大量无雾图像(不包括天空区域)统计观察发现,无雾图像中大多数的局部区域包含着一些强度值很低或者强度值接近于零的像素。基于此,他提出了暗通道先验模型,即对于任意一幅无雾图像,暗通道可以被计算为在一个局部区域全部像素的最小值:
(2)
其中:Ω是以x为中心的一个方形窗口,Jc是J的一个确定了的RGB颜色通道,Jdark是暗通道图像。
暗通道和雾的浓度深深相关,He等挑选暗通道最亮的0.1%像素,这些像素就是雾最浓的像素,并从这些像素中挑选原图像I中强度最大的像素作为大气光的估计值。然而,受白色物体的影响,暗通道选择雾最浓的区域可能会失效。
(3)
若是将式(3)直接代入式(1)中,去雾图像会出现明显的块效应,因此He等采用软抠图[7]对其进行优化,后来将软抠图换成引导滤波[8]用来对原始传输图进行保边平滑。然而,当图像平滑和保边同时应用时,由于固定的正则化参数,边缘可能会无法避免地被平滑,会产生光晕效应。
本文中,针对上述两个问题,提出了一种改进的大气光估计方法,以解决大气光估计不准确的问题。并提出一种改进的引导滤波对传输图进行优化以解决光晕效应。利用优化后的传输图t(x),去雾图像J(x)可表示为:
(4)
式中t0是一个防止分母为0的一个下限值,本文中取值为0.1。
3 本文算法
3.1 大气光估计
He等[7]首先在暗通道中选取最亮的0.1%像素,然后从其中选取强度最高值作为大气光估计值。然而,受白色物体的影响,暗通道可能会错误的选取雾最浓的区域,从而导致错误的大气光估计值,这样去雾图像可能会产生颜色扭曲现象。Kim等[20]对有雾图像进行四叉树细分,并从分成的子块中选取最大平均值的子块,再将该子块进行四叉树细分,重复该过程直至达到预先设定好的次数为止。然后在最后的子块中,选取一个和(255,255,255)最小的距离的颜色向量作为大气光的估计值。然而,如果图像中包含明亮区域,这个方法可能会错误的估计大气光值,如图1(b)所示。为了更加可靠的选取大气光值,本文假定大气光弥漫在有雾图像的大部分区域,而且在局部区域它的强度值是最高的。通过假定大气光的这两个方面,本文通过对一个改进后的暗通道图像进行四叉树细分。该改进的暗通道与原始暗通道的区别在于该改进后的暗通道将图像分成各个不重叠的子块L(x),对每个子块中选取这个子块中最小值代替这个子块中所有的值,从而得到改进的暗通道:
(5)
该子块大小根据准确性和可靠性两方面来凭经验的选取为30×30,图1(c)展示了通过式(5)改进后的暗通道。从图中可以发现,改进后的暗通道比原始图像子块平均值有着更低的强度值,在该提出的方法中,四叉树细分方法可以选取更加可靠的用来估计大气光的候选区域。可以从图1(c)看出,提出的方法选取天空区域作为最终的候选区域,该方法没有受到图像底部白色建筑物的干扰。在最终候选区域的像素中,本文通过选取一个和(255,255,255)最小距离的颜色向量作为大气光的估计值,即‖(r,g,b)-(255,255,255)‖。通过最小化与纯白色(255,255,255)的距离,可以估计更可靠的大气光估计值。
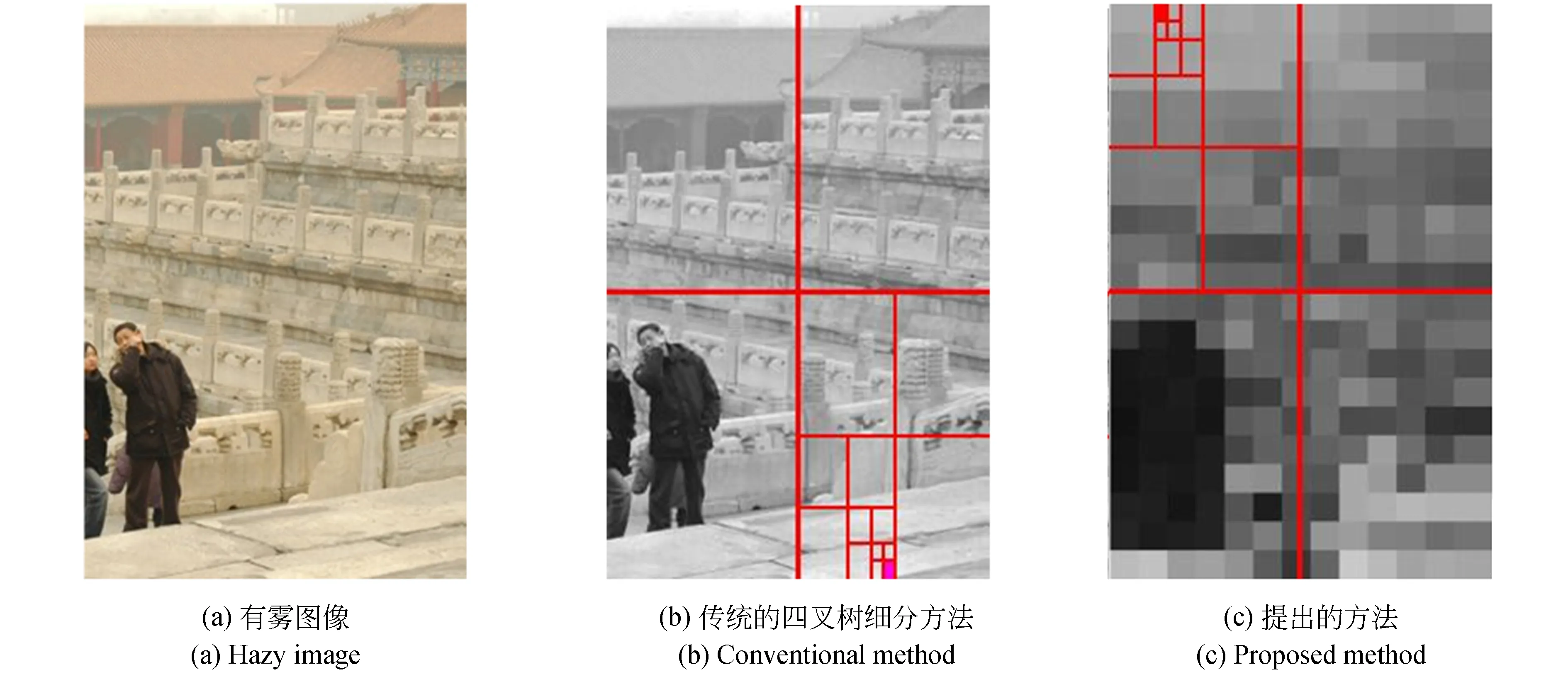
图1 图像中填满红色区域为最终选定区域Fig.1 Blocks filled with red color are finally selected region
3.2 引导滤波的改进
引导滤波[8]可以平滑图像和保持图像边缘信息,其最大的特点是计算速度快,近几年出现了一些基于引导滤波的去雾算法[21-22]。引导滤波的关键假设是局部线性模型:
qi=akIi+bk,∀i∈ωk,
(6)
其中:I是引导图像,q是滤波输出,ωk是以像素k为中心r为半径的一个方形窗口,ak和bk是两个在窗口ωk下的线性系数,假定为常数。
局部线性模型保证了只有当引导图像I有边缘时,对应的输出图像q也会有该边缘。引导滤波是一个快速保边平滑滤波器。它对比双边滤波,不仅其速度比双边滤波快,而且引导滤波可以避免出现梯度反转效应。引导滤波的线性系数ak和bk可以通过最小化代价函数E(ak,bk)来得到:
(7)
其中正则化参数λ用来防止ak过大。然而,由于引导滤波的λ参数是固定的,当引导滤波用于平滑图像时,其也会同样地平滑边缘,这样以来,光晕效应就会无法避免的产生。为了减弱光晕效应,本文引入了一个自适应权重φi来解决这个问题,自适应权重因子可以根据不同的情况来调整正则化参数。理想的权重模型需要当像素在边缘时有个大的权重,而在非边缘时有个小的权重。而图像的梯度信息可以满足这个思想。所以自适应权重因子φi被设计为:
(8)
其中:CGi是引导图像I在像素i点的颜色梯度值[23],k是阈值,其值被取为0.05×L,阈值k是用来决定是否像素点在边缘区域。L是输入图像的动态范围,ε是一个小的正常数,用来防止分母为0。
CGi能根据当前像素点的灰度突变程度公正的决定该像素点边缘信息放大力度。当像素位于图像边缘时,边缘信息越显著,权值φi越大,表现为对边缘信息敏感;当像素不在边缘时,权值φi较小,表现为对边缘信息不敏感。
将自适应权重因子应用在代价函数中:
(9)
引导滤波的线性系数ak和bk可以被计算为:
(10)
(11)

(12)
由于暗通道先验的简易性和有效性,原始传输图根据暗通道先验来估计。原始传输图可以进一步被式(9)来平滑,得到最终的传输估计图。根据已求得的大气光值A和传输图t(x)将其代入式(4)即可求得无雾图像J(x),如图2所示。

图2 运用改进后的引导滤波来精细传输图的图解Fig.2 Illstration of the proposed improved GIF by using it to refine the transmission map of a haze image
4 实验结果
为了证明提出的方法的有效性,通过现阶段的去雾算法对多个不同的有雾图像进行了实验比较,实验结果由两部分组成,第一部分讨论去雾效果图比较。第二部分展现了各个去雾效果图的客观评价标准的比较。
4.1 主观评价
在本节,提出的滤波器与引导滤波以及加权引导滤波[24]在去雾领域进行了比较,为了公平起见,除了滤波器不同,其余参数均为相同。从图3可以看出本文提出的滤波器在天安门屋檐处的光晕效应得到了有效减弱,保护细节比引导滤波和加权引导滤波更好。接下来,提出的算法与三种现阶段较新的去雾算法进行航空图像实验效果比较,所有的参数设置选取全都与这些算法原文中设置的最佳参数相同。从图4(b)可以看出颜色衰减先验在雾不浓的情况下去雾效果还行,但在雾浓的情况下去雾效果较差。这是因为α和线性模型系数的值都是固定的,这些值应该根据输入图像的雾的浓度来自适应调整。从图4(c)可以看出暗通道先验由于引导滤波的过度平滑,导致图像去雾效果不清晰。从图4(d)可以看出非局部先验去雾效果比其他去雾算法更好,但其可能发生错误的将像素聚类到雾霾线的情况,这将导致颜色失真。可以看出本文算法产生了更好的去雾效果,去雾图像颜色更为可靠,光晕更少。

图3 引导滤波,加权引导滤波和我们的滤波器处理后的去雾图像比较Fig.3 Comparison of GIF, WGIF and proposed algorithm
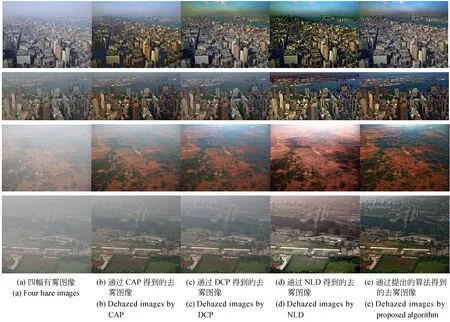
图4 提出的去雾算法和文献[5-7]三个去雾算法的比较Fig.4 Comparison of the proposed haze removal algorithm and the haze removal algorithms in [5-7] via three haze images
4.2 客观评价
表1展示了提出的方法和现阶段去雾算法的客观评价指标[25]比较,从中可以看出提出的算法有最好的e,r和IVM,对于σ,提出算法的结果不是最好就是第二好的结果。从客观评价指标对比来看,提出的算法无论是边缘细节还是可视性来说,都比现阶段算法效果好,但对于某些图像去雾后饱和度略差。
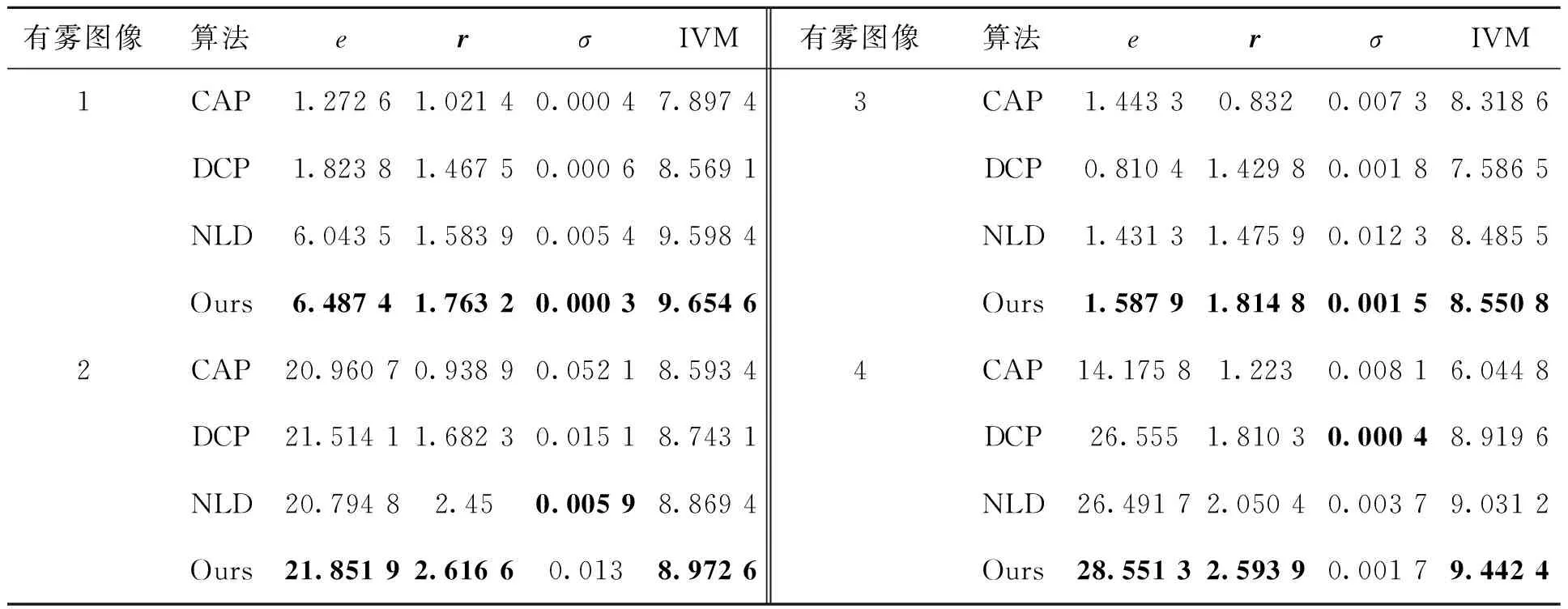
表1 客观评价指标比较
5 结 论
在本文中,对暗通道先验算法进行了改进。首先,提出的方法对有雾图像的暗通道进行改进,改为不重叠区域,将不重叠的暗通道进行四叉树细分来估计大气光值。其次,本文提出了引入了一个自适应权重到引导滤波中,提出的滤波器保边效果更好,光晕现象较小且不出现过度平滑现象。本文方法产生了视觉上非常令人满意的结果,因此更加有利于在航空图像成像系统中的应用。此外,除了单幅图像去雾,改进后的滤波器还可以应用到许多其它的领域,比如去噪、细节增强、高动态范围压缩、抠图等等领域的研究。我们将在未来的科研中研究这些领域的应用。
猜你喜欢
智能计算机与应用(2022年10期)2022-11-05
现代计算机(2021年36期)2021-03-14
自动化学报(2019年11期)2019-12-12
成都信息工程大学学报(2019年3期)2019-09-25
计算机应用(2018年12期)2019-01-07
自动化学报(2017年5期)2017-05-14
英语学习(2016年12期)2017-02-28
光学精密工程(2016年4期)2016-11-07
探测与控制学报(2015年4期)2015-12-15
读者·校园版(2014年6期)2014-05-14