钢丝绳传动航空光电稳定平台设计
2020-07-07 02:52许永森田大鹏王福超王中石
光学精密工程 2020年6期
石 磊,许永森,田大鹏,王福超,王中石,3
(1.中国科学院 长春光学精密机械与物理研究所,吉林 长春 130033;2. 中国科学院 航空光学成像与测量重点实验室,吉林 长春 130033;3. 中国科学院大学,北京 100049)
1 引 言
系留气球可以作为高光谱相机的飞行平台,然而,受高空不稳定气流扰动的影响,气球的姿态变化幅度大;因此,需研制一台具有惯性指向与稳定功能的两轴稳定平台,对气球平台的方位姿态和俯仰姿态变化进行角度补偿,使高光谱相机工作在稳定的成像环境中,从而获取高质量的遥感数据。
传统的航空光电稳定平台机械传动多采用电机直驱或电机加齿轮减速传动机构。采用力矩电机直接驱动,当驱动力矩要求大时,力矩电机的体积、重量较大,给系统的小型化和轻量化带来困难。高光谱相机的体积尺寸和重量大,力矩电机直驱方式不能满足稳定平台质量小于60 kg的指标要求。若采用齿轮减速传动,即便是最精密的齿轮传动也存在着间隙、磨损等缺陷,不可避免地存在空回。传动空回会直接影响伺服系统动态性能和精度,是影响伺服系统刚度的关键因素之一[1-3]。
钢丝绳传动具有高精度、无空回等特点,在气球稳定平台[4]、机载吊舱[5]、光电系统[6]、导弹导引头[7-8]、车载卫通天线[9]、空间探测[10]和机器人领域[11-12]等精密伺服机构中有着广泛的应用,已成为实现高精度、高动态、轻量化精密伺服机构性能的重要技术途径[13]。钢丝绳传动有很多优点:刚度可达到同精度齿轮传动系统的10倍以上,输出轴精度可达到微弧度;适应温度范围宽,对温度变化不敏感,能够在地面和高空较大温度变化下稳定工作;传动效率高,可高达到98%;重量轻,在传递相同功率的条件下,较其他传动机构的重量轻;加工成本低,无需润滑和密封,几乎不需要维护[14-16]。
本文根据系留气球平台的特点和高光谱相机的技术指标要求,设计了一台钢丝绳传动两轴稳定平台,方位轴和俯仰轴采用钢丝绳传动结构。首先对稳定平台进行了实验测试,得到相关性能参数,然后进行系留气球挂载高光谱相机空中对地观测试验。试验结果表明,稳定平台满足高光谱相机稳定成像的技术指标要求。
2 设计与仿真
2.1 稳定平台结构组成
稳定平台挂载在系留气球底部,要实现高精度稳定,机械结构应具有适应环境条件变化的能力,具有足够的刚度和强度,同时体积小、质量轻。稳定平台采用"两轴两框"结构,这种结构形式具有机械强度高、运动精度易实现的特点。稳定平台的结构以及模型分别如图1和图2所示。该平台主要包括底座、方位框架、方位轴系、方位轴主动轮、方位轴被动轮、方位锁紧机构、俯仰框架、俯仰轴系、俯仰轴主动轮、俯仰轴被动轮和轮俯仰锁紧机构等。其中,方位轴和俯仰轴均由伺服电机驱动,电机尾部安装有高精度编码器。
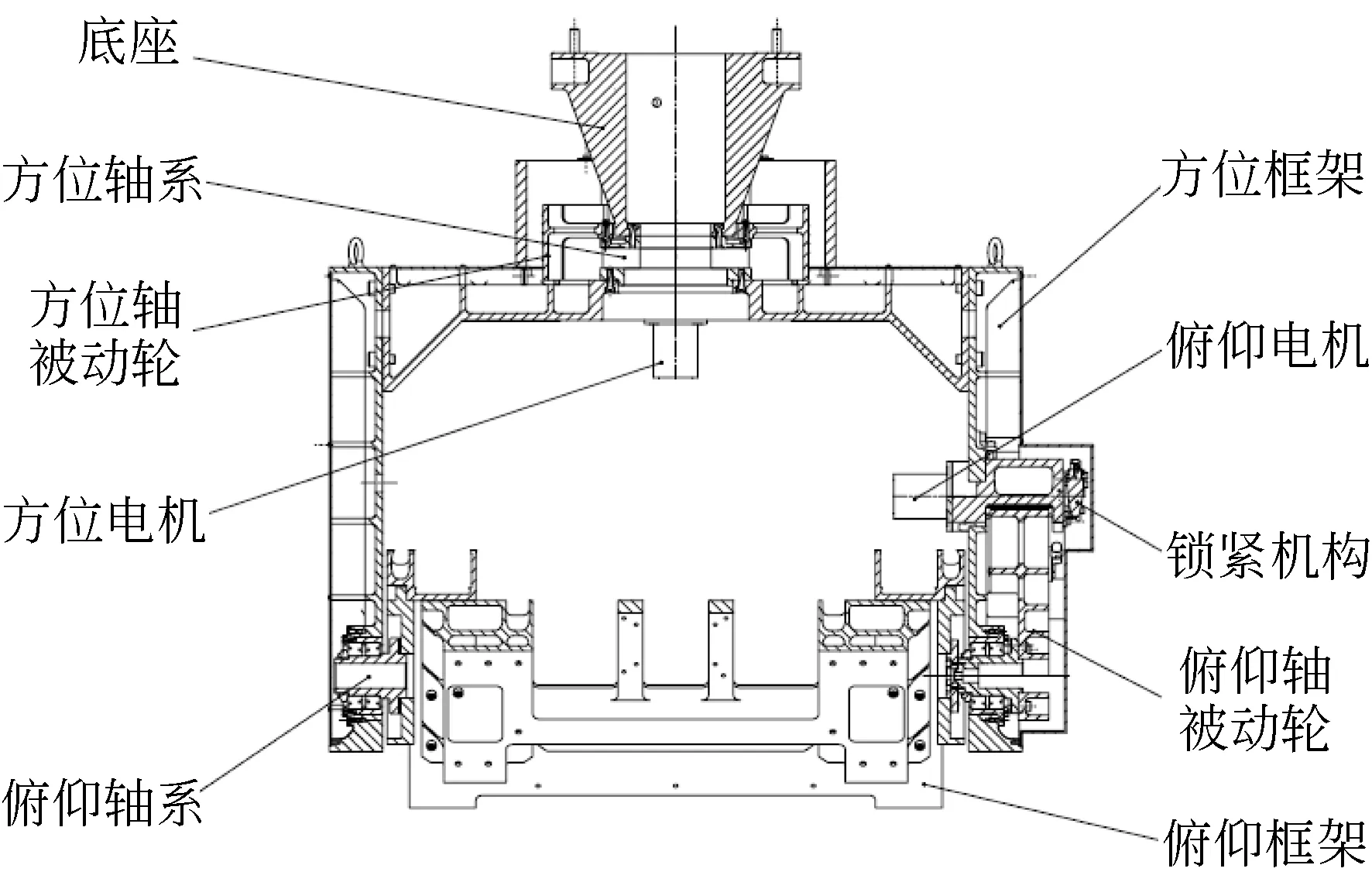
图1 稳定平台结构示意图Fig.1 Schematic diagram of the stable platform
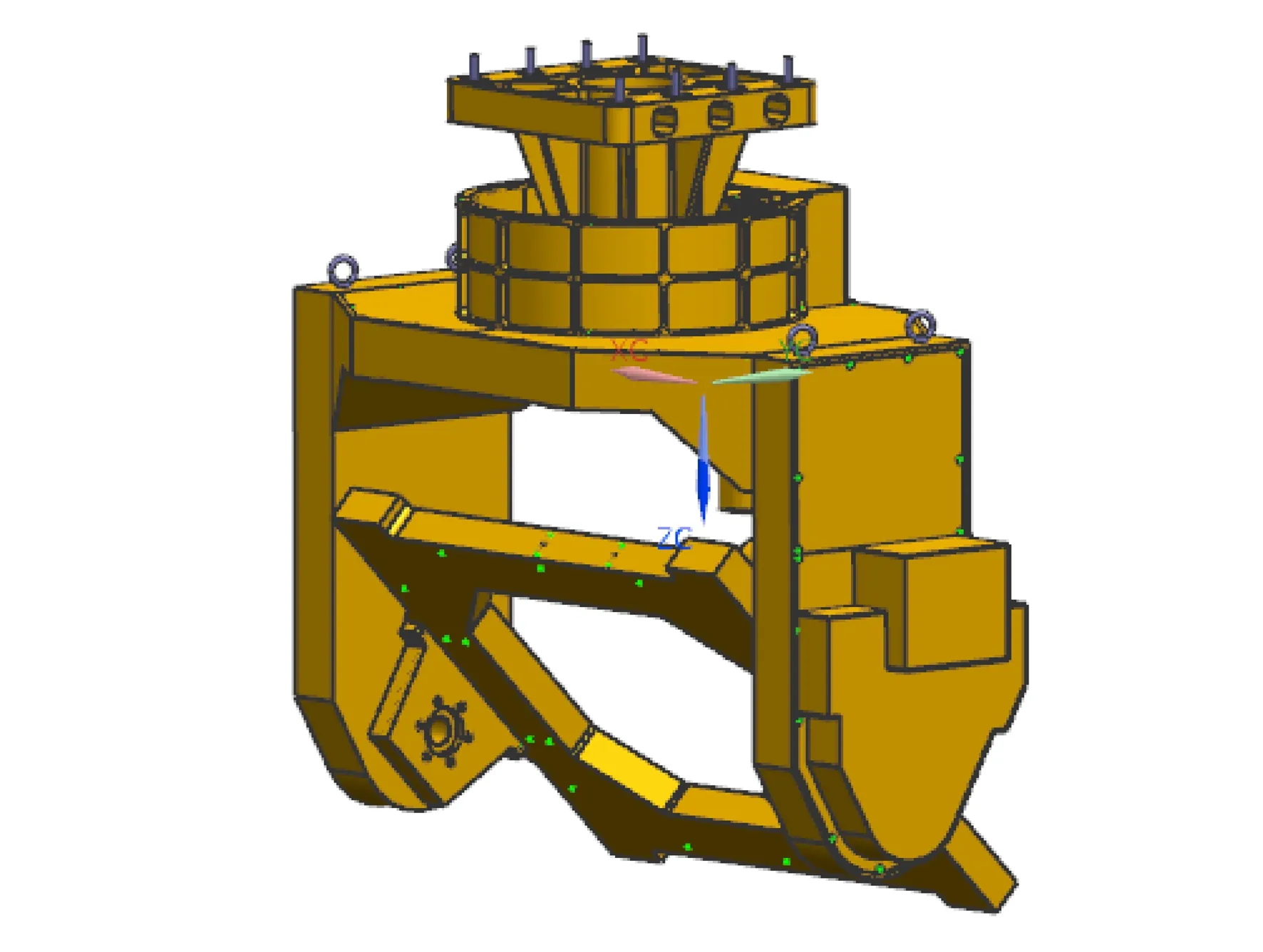
图2 稳定平台仿真模型Fig.2 Outline model of proposed aviation stable platform
2.2 钢丝绳传动机构设计
钢丝绳传动采用"Rot-Lok"型结构,这种柔性传动机构具有精度高、噪声低、传动平稳、无需润滑、易于安装和维护等特点。在被动轮上的每组钢丝绳一端都串联预紧弹簧,弹簧使每组钢丝绳在工作之前就预先加载一定的预紧力,并可通过精确调整弹簧的长度来定量地设定预紧力。这种结构的输入轴与输出轴的轴线平行,两轮的转动方向相反,理论传动比就是两轮的直径之比。钢丝绳传动主要依靠钢丝绳与主动轮之间的摩擦力进行驱动,主动轮采用螺旋槽,螺旋形绳槽顺应绳的缠绕方向,钢丝绳磨摩擦力大。被动轮采用无槽设计[17-21]。
在机构轻量化、小型化的设计中,钢丝绳的弯曲是主要的限制条件。一般地,驱动轮的直径与钢丝绳直径的比值至少要大于18。本文钢丝绳直径为1 mm,方位和俯仰主动轮直径均取25 mm。根据高光谱相机和稳定平台的尺寸和质量,经结构排布和力矩估算,方位轴和俯仰轴的被动轮直径分别取为300 mm和375 mm。
2.2.1 传动比和传动螺距
钢丝绳传动的传动比定义为:
(1)
其中:R1为被动轮的半径,R2为主动轮的半径,h1为被动轮绳槽的槽深(若无槽则槽深度为0),h2为主动轮绳槽的槽深,r为钢丝绳的半径。
经计算,方位轴和俯仰轴的传动比分别为12∶1和15∶1。
被动轮的螺距:
p1=ip2,
(2)
式中:p2为主动轮螺旋槽的螺距;i为传动比。
主动轮螺旋槽的螺距取2 mm,方位轴和俯仰轴被动轮上钢丝绳的螺距分别为24 mm和30 mm。
2.2.2 有效传动角度
图3为钢丝绳传动轴向投影示意图。∠BOE为传动中心角θ,它是钢丝绳出绳(或入绳)段对于传动轮的圆心角。
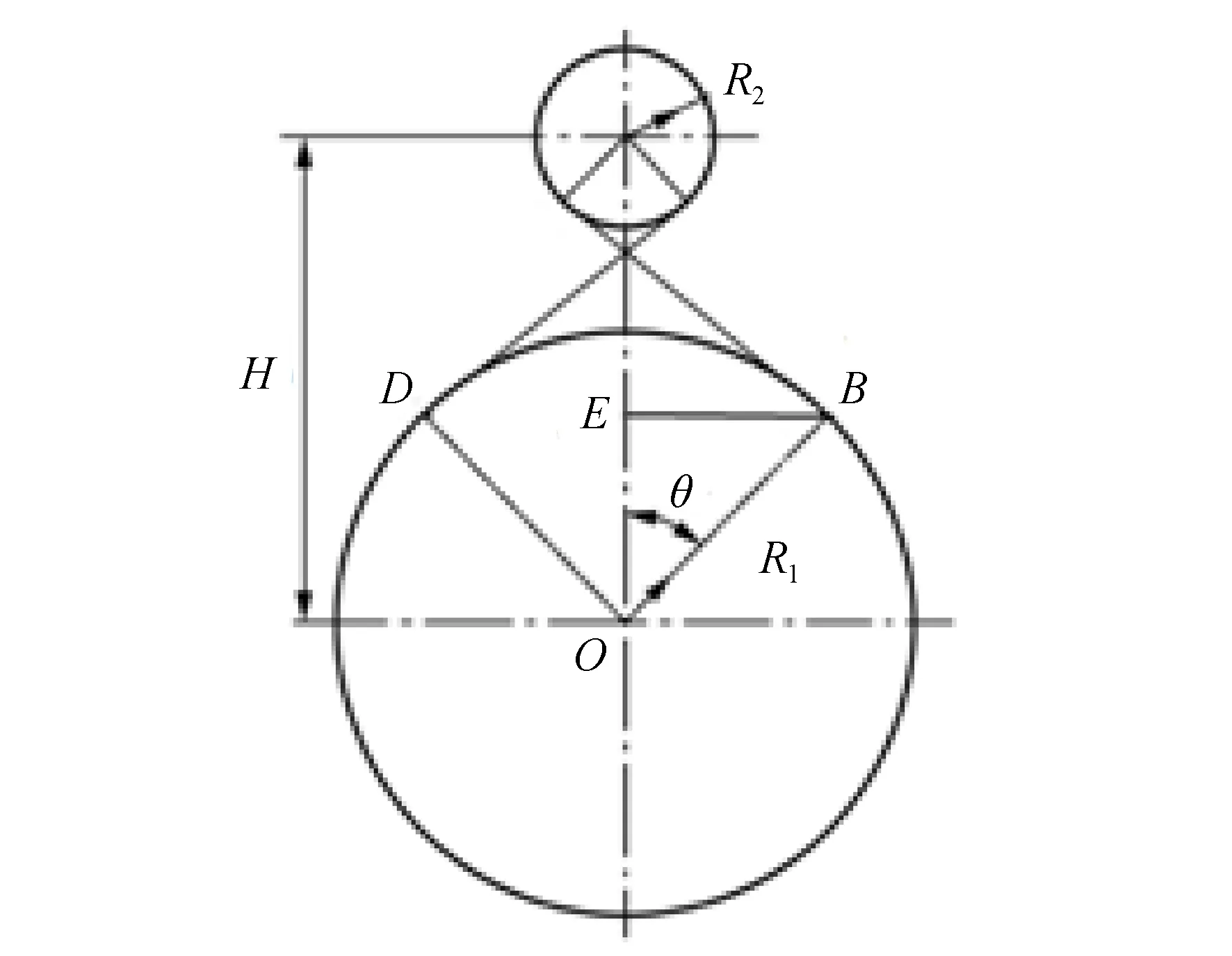
图3 钢丝绳传动轴向投影示意图Fig.3 Schematic diagram of axial projection of cable drive
有效传动角度φ的范围由弹簧预紧装置占被动轮的角度β和传动中心角θ决定:
0≤φ≤2π-2θ-β,
(3)
(4)
根据式(3)和式(4)计算得出方位轴和俯仰轴被动轮的2θ角分别为30°和22.5°。β值由弹簧预紧装置尺寸决定,根据结构设计结果,方位被动轮β值为50°,计算得出方位轴的有效传动角度为0°~280°。俯仰轴的有效传动角度设计值为45°±12°。
2.2.3 钢丝绳作用力
在钢丝绳传动中,预紧力为:
(5)
式中:M为传动的负载力矩;D为被动轮的直径;n为钢丝绳组数;μ为绳与轮的当量摩擦系数,本文主动轮材料选用不锈钢,与钢丝绳的当量摩擦系数为0.15;α0为主动轮的全围包角。
紧边拉力为:
(6)
松边拉力为:
(7)
紧边拉力为钢丝绳受到的最大拉力,是钢丝绳和张紧弹簧选型的参考拉力。钢丝绳承受拉力和张紧弹簧提供的张紧力均需大于传动中的紧边拉力。张紧力是钢丝绳传动的重要设计因素,对传动系统的传动空回、传动刚度、传动力矩和动力学特性等具有重要的调控作用[22]。通过设置合适的张紧力,可确保在正反转传动过程中均无空回。
本设计参考缆索起重机牵引绳的最小安全系数不小于4进行钢丝绳选择,方位轴和俯仰轴钢丝绳组数取6。
图4和图5分别为设计完成后的稳定平台方位轴和俯仰轴的钢丝绳传动结构。
方位轴和俯仰轴选用相同的电机驱动组件,电机驱动组件的连续驱动力矩为7.8 N·m,最高转速为300 (°)/s。方位轴和俯仰轴的连续驱动力矩分别为93.6 N·m和117 N·m,最高转速分别为25 (°)/s和20 (°)/s。
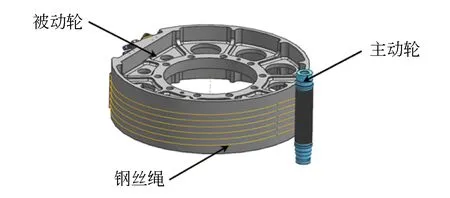
图4 方位轴钢丝绳传动结构Fig.4 Transmission structure of cable drive for azimuth axis
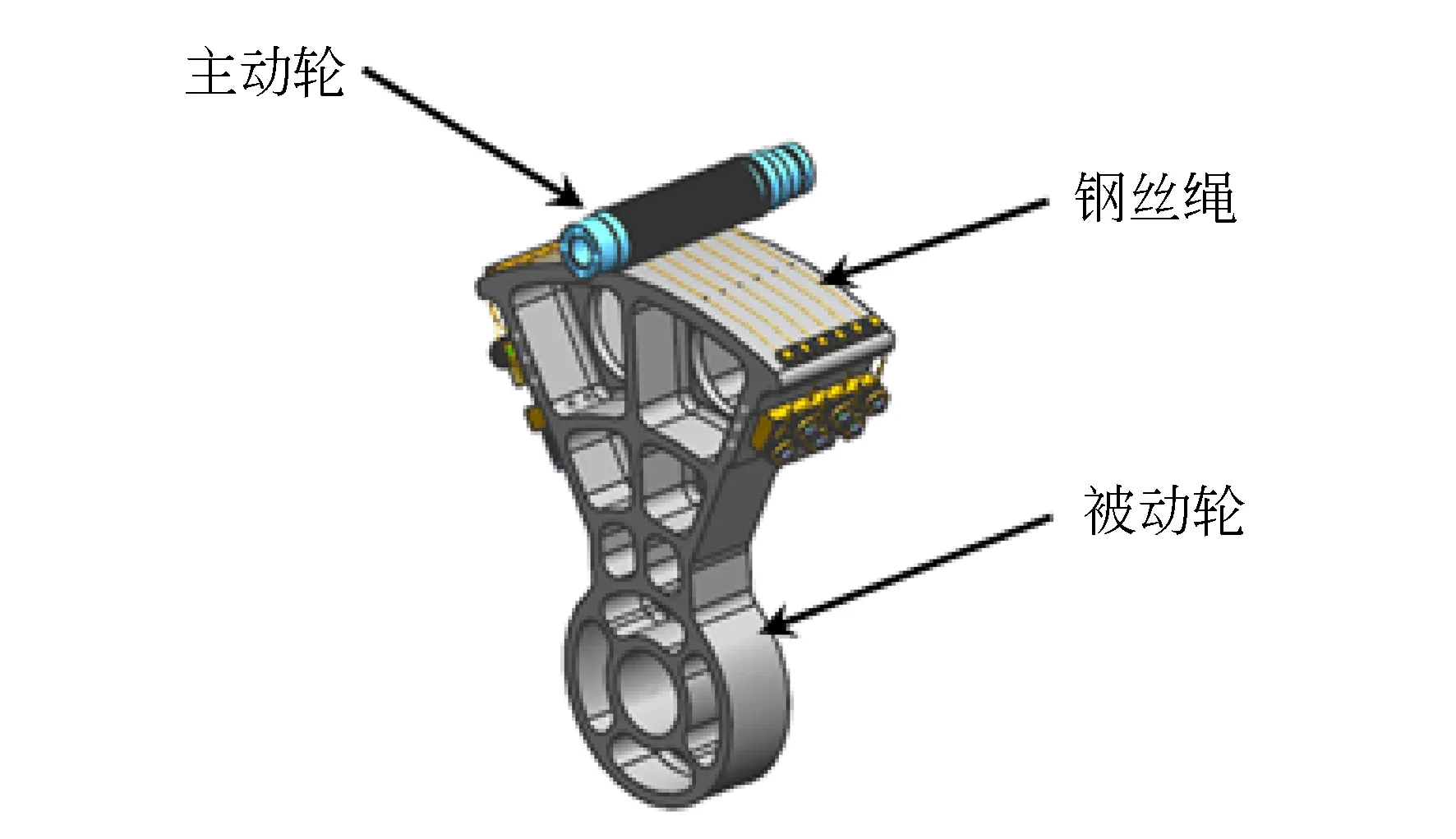
图5 俯仰轴钢丝绳传动结构Fig.5 Transmission structure of cable drive for pitch axis
2.3 结构仿真分析
2.3.1 仿真建模
对设计完成后的稳定平台结构进行有限元工程分析,主要包括静力学分析和模态分析,考核稳定平台的静刚度与动刚度。
根据稳定平台和高光谱相机的结构特点进行模型简化,主要采用壳单元对稳定平台的支撑结构进行离散化处理,并忽略部分工艺孔与工艺台阶。对具有运动自由度的轴承环节,采用杆单元进行模拟。对高光谱相机采用等效质量点的方式进行简化,质心位置与实际一致。整个模型的节点数量达到44 981,单元数量达到44 724,有限元模型如图6所示。
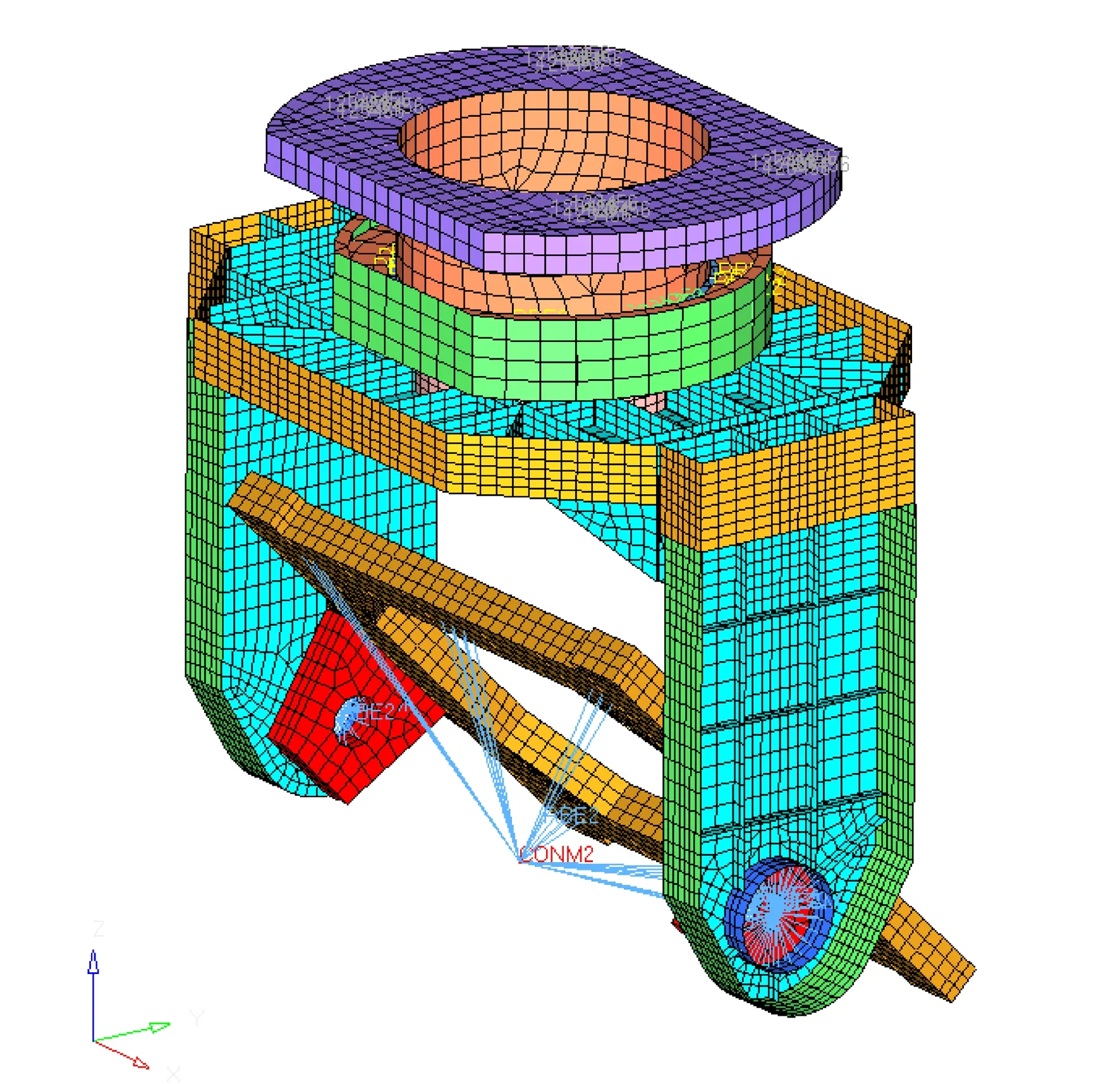
图6 稳定平台的有限元网格Fig.6 Finite element mesh of stable platform
2.3.2 分析结果
图7为稳定平台重力作用下的变形云图。在1g重力作用下,稳定平台最大变形量为50 μm,满足结构刚度要求。固有频率和振型是评价结构动态刚度的重要指标。表1为稳定平台前6阶固有频率的计算结果。一阶固有频率为19.1 Hz,图8为稳定平台的一阶振型。通过有限元分析,可初步确定稳定平台的结构满足刚度和伺服控制要求。
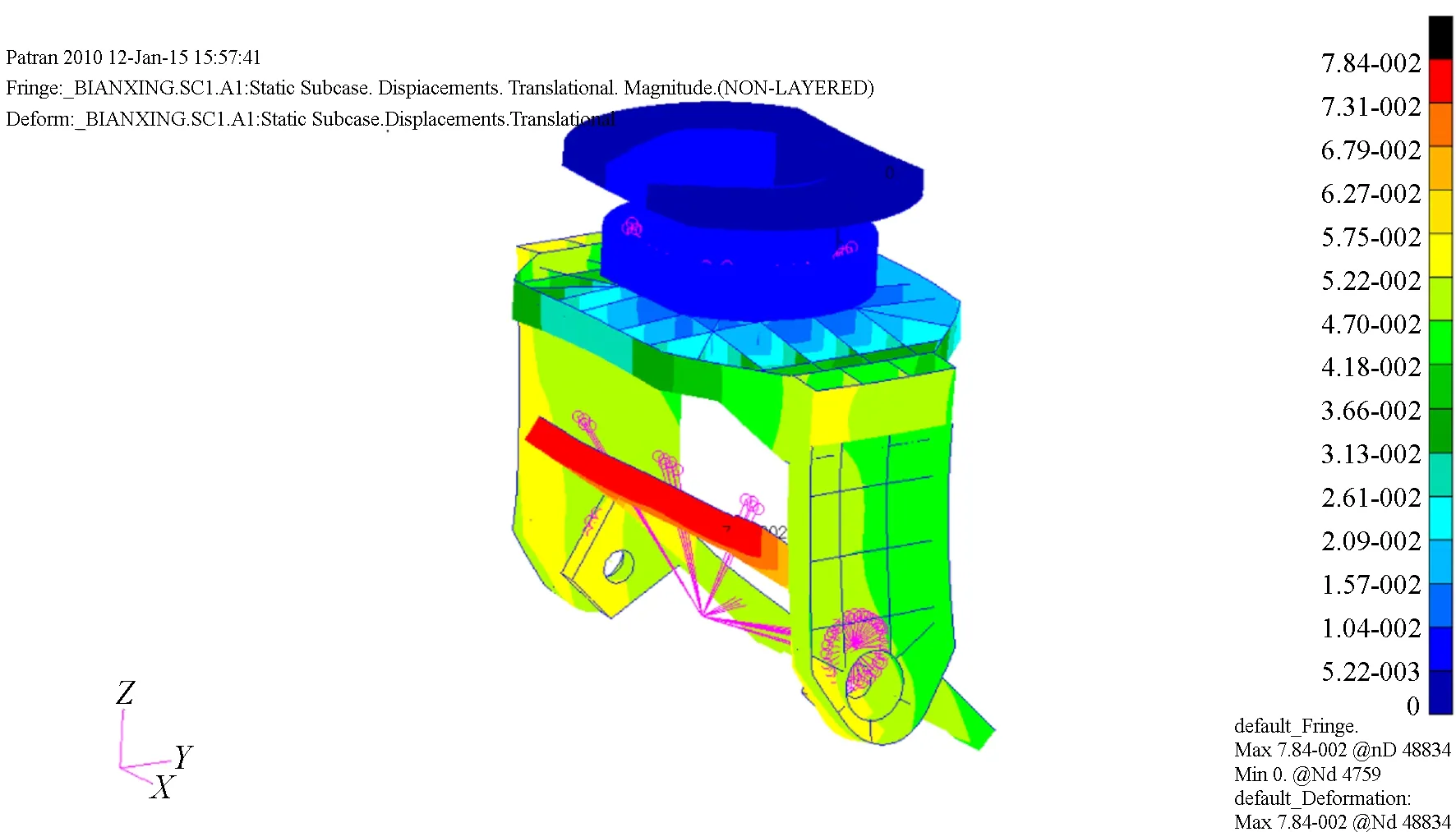
图7 稳定平台重力变形云图Fig.7 Cloud chart of gravity deformation of stable platform
表1 稳定平台模态分析结果
Tab.1 Modal analysis results of stable platform
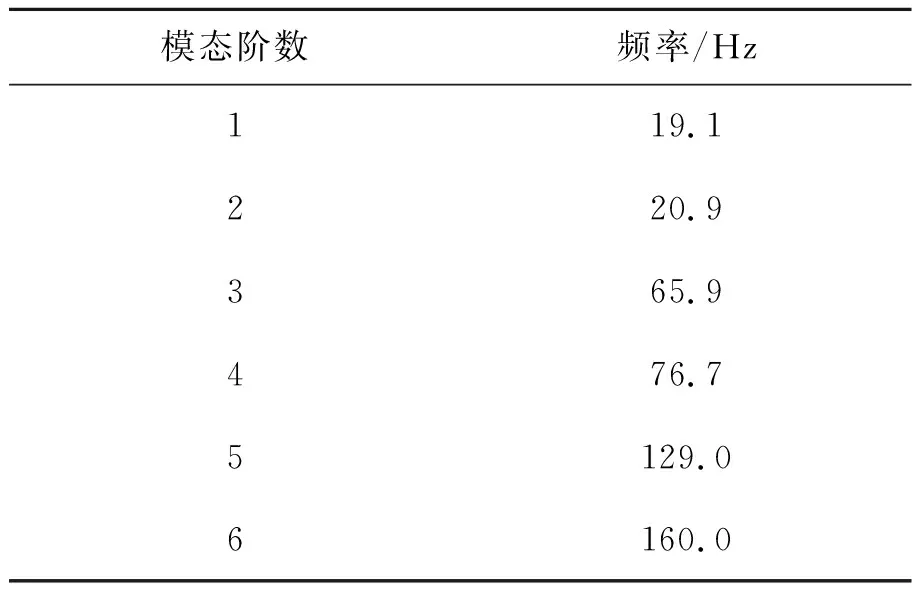
模态阶数频率/Hz 119.1220.9365.9476.75129.06160.0
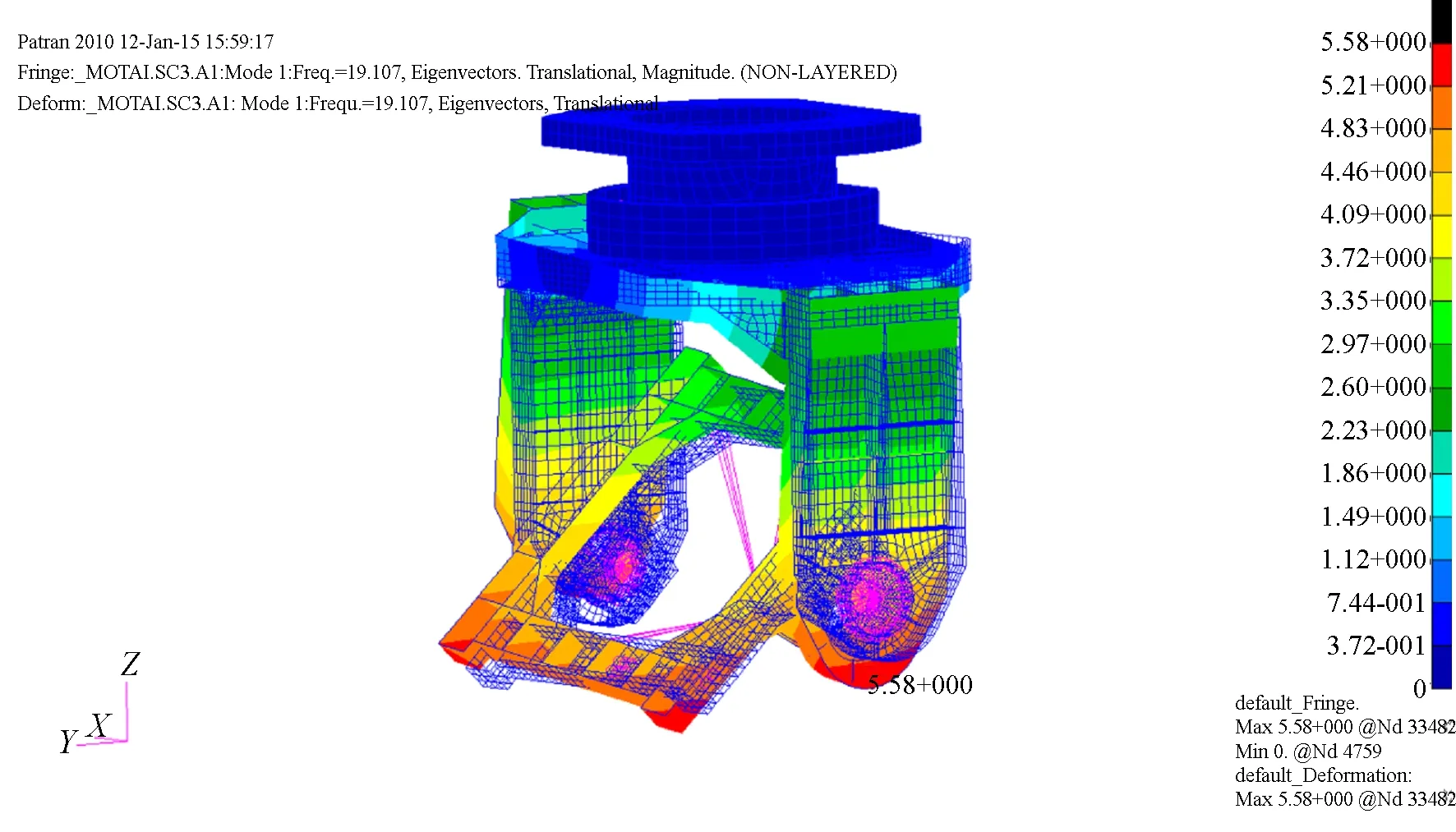
图8 稳定平台的一阶振型Fig.8 First-order mode shape of stable platform
3 实 验
3.1 传动误差
钢丝绳传动误差是制约伺服性能的关键因素。传动误差是指当输入轴单向转动时,输出轴的实际值相对理想值的偏差[23]。
首先对稳定平台的传动误差进行了实验测试,图9为稳定平台传动误差实验室测试情况。在稳定平台俯仰框架上安装一个平面反射镜,俯仰框架位于零位,即与地面水平夹角为45°时,反射镜与地面垂直。在反射镜前方放置准直仪,与反射镜进行对准。方位和俯仰的驱动轴分别输入5 μrad转动角度时,准直仪测得方位和俯仰框架的转动角度为5 μrad,反方向测试结果相同。测试表明方位轴和俯仰轴的正反向传动精度可达到5 μrad。
对方位轴的主动轴连续输入固定角度0.05°进行驱动,使用准直仪测得方位外框架转动角度,可以得到方位轴的传动误差。同样方法可以得出俯仰轴的传动误差。表3和表4分别为方位轴和俯仰轴的传动误差测试结果,从表中可看出方位轴的传动误差不大于0.7%,俯仰轴的传动误差不大于0.4%。

图9 稳定平台实验室测试Fig.9 Laboratory test of stable platform
表3 方位轴传动误差
Tab.3 Transmission errors in azimuth axis
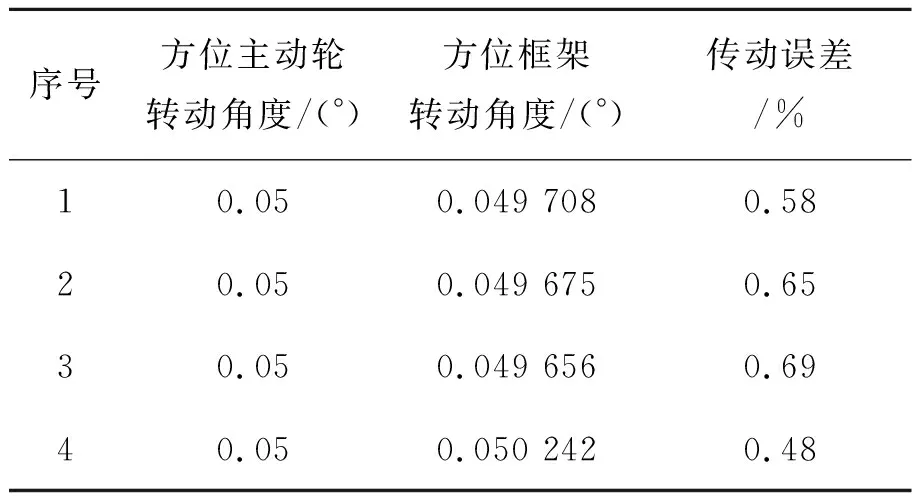
序号方位主动轮转动角度/(°)方位框架转动角度/(°)传动误差/% 10.050.049 7080.5820.050.049 6750.6530.050.049 6560.6940.050.050 2420.48
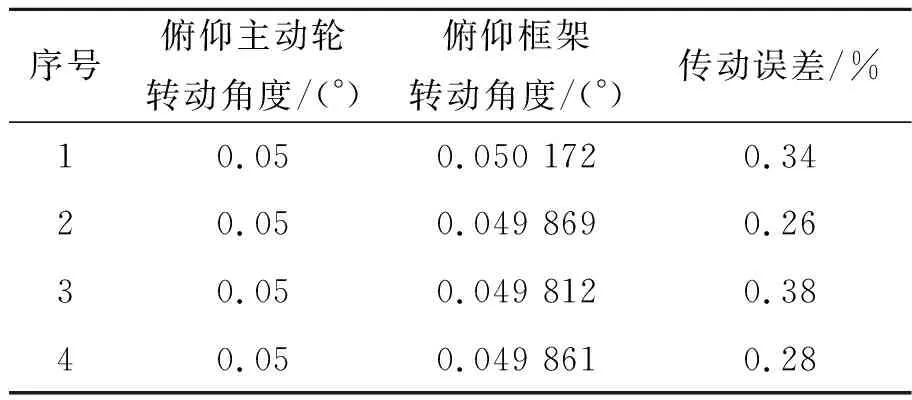
表4 俯仰轴传动误差
3.2 正弦跟踪性能测试
图10为稳定平台方位轴和俯仰轴正弦跟踪测试输入输出曲线对比(彩图见期刊电子版),图中蓝色曲线为输入值,红色曲线为输出值,从图中可以看出输出与输入相位一致。图11为稳定平台方位轴和俯仰轴的跟踪误差,两轴的跟踪误差的均方根值分别为0.004 5°和0.004 3°。
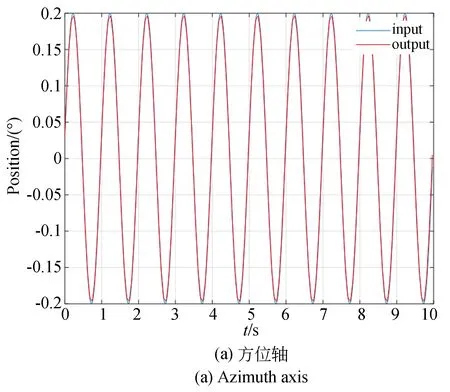
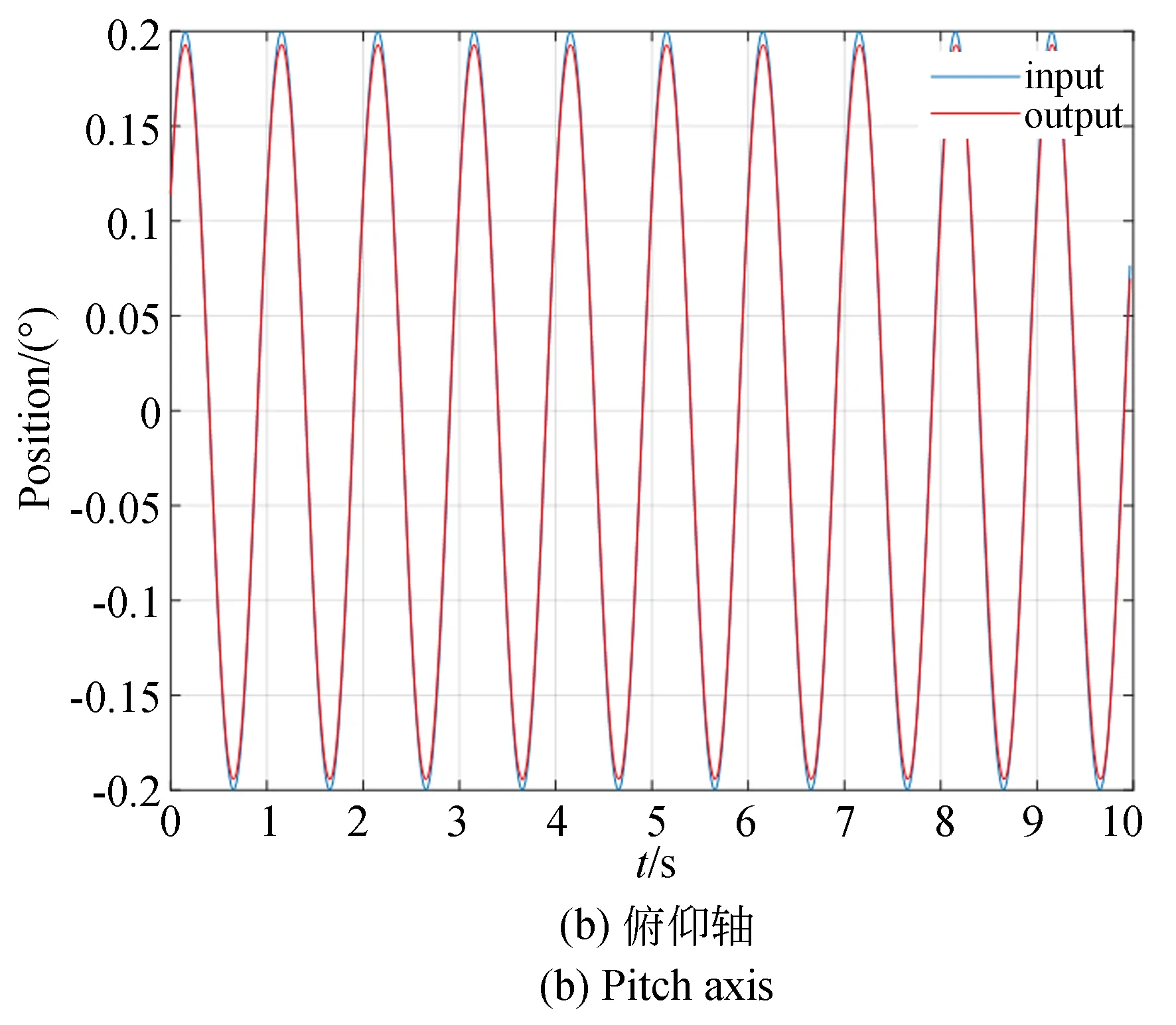
图10 稳定平台跟踪测试输入输出曲线对比Fig.10 Comparison of input and output curves in tracking test of stable platform
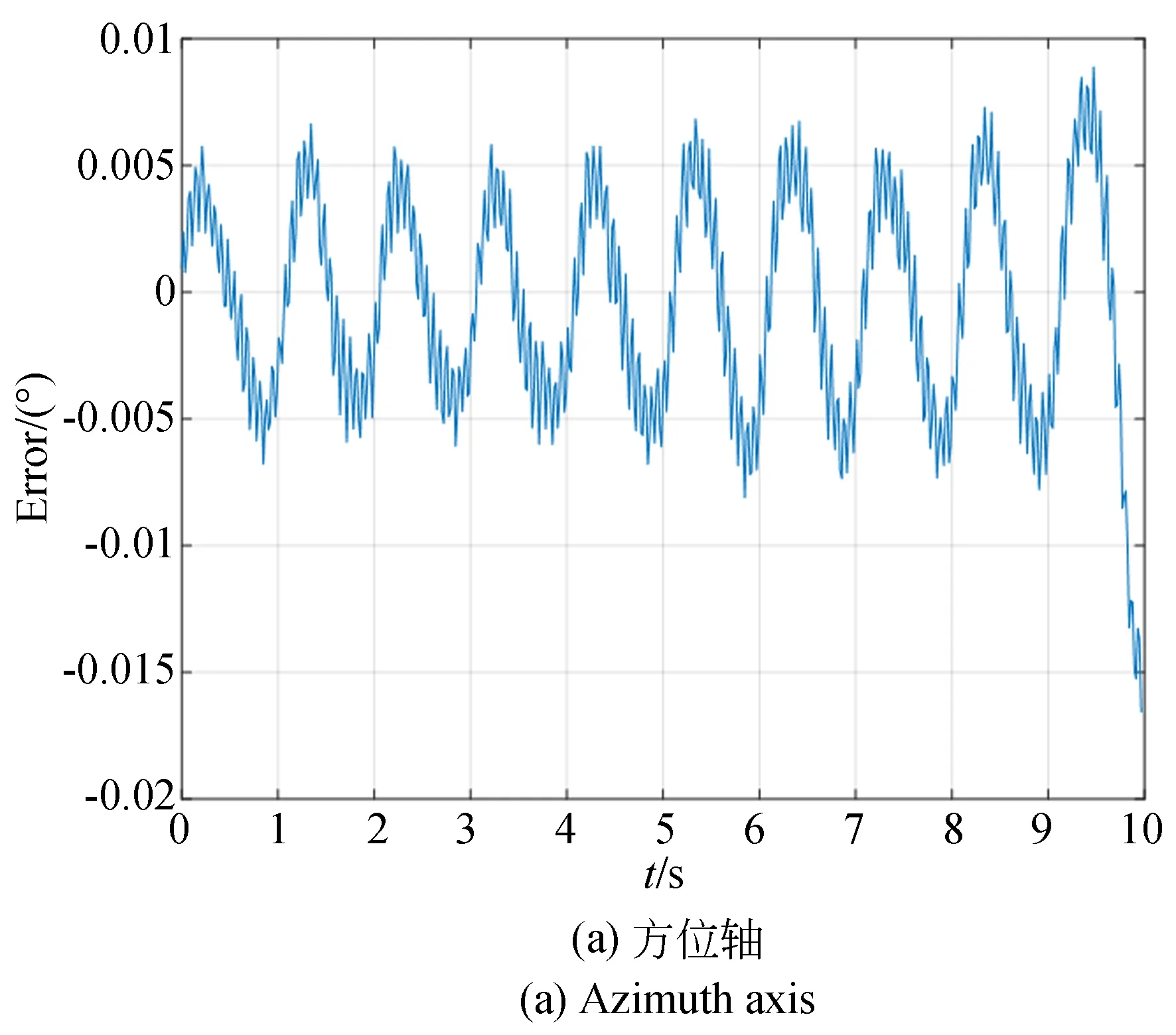
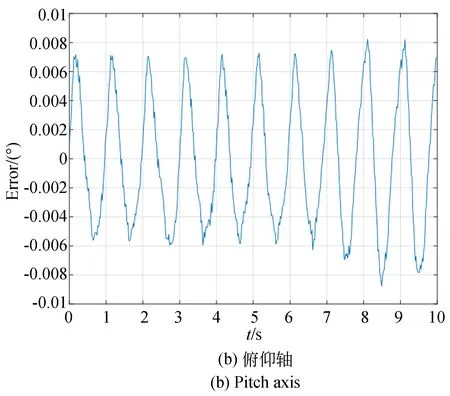
图11 稳定平台的跟踪误差Fig.11 Tracking errors of stable platform
3.3 伺服带宽
图12和图13为稳定平台方位轴和俯仰轴的速度开环频率特性测试结果,经测试方位轴和俯仰轴的伺服控制带宽分别为15 Hz和35 Hz。
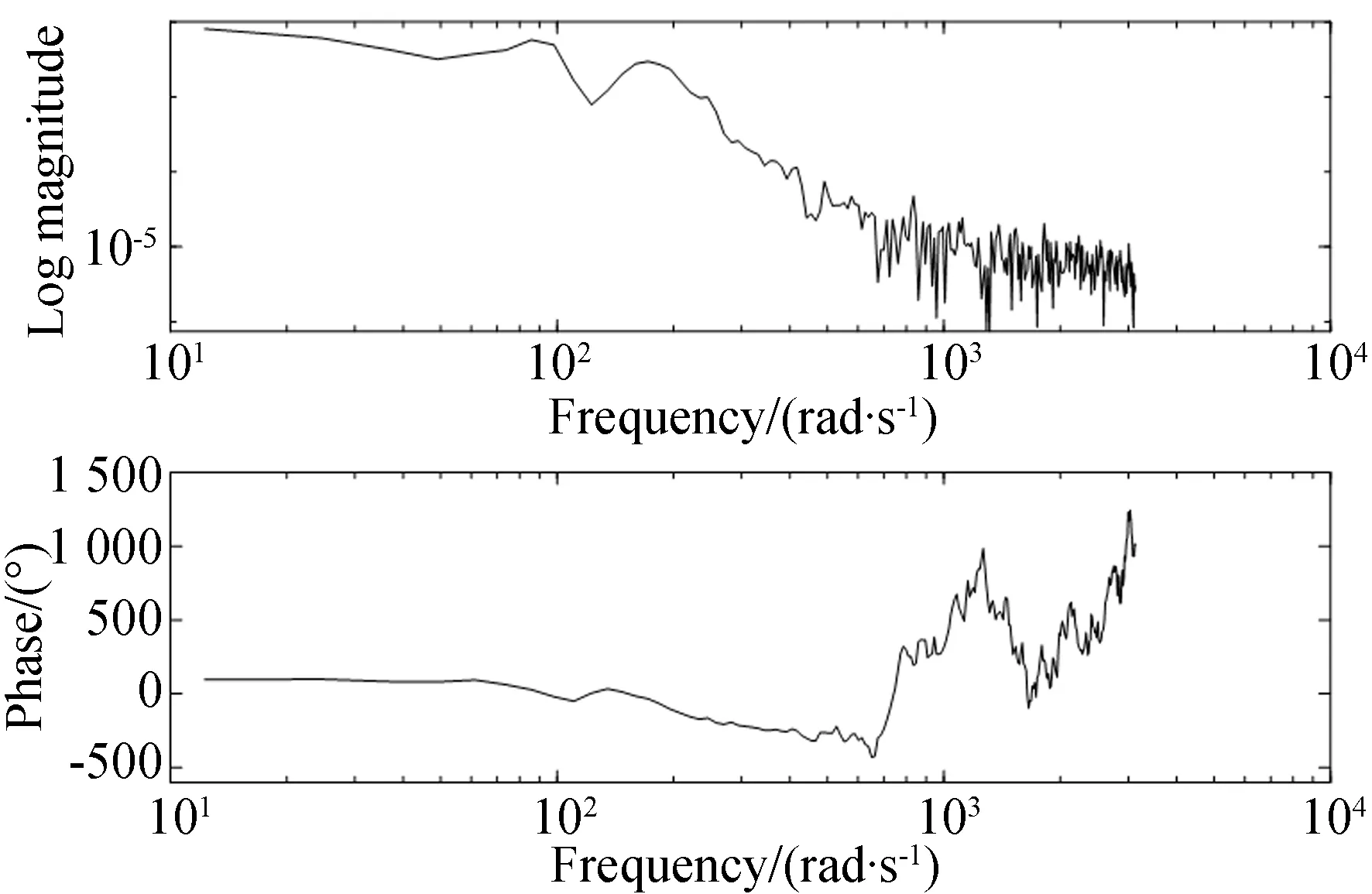
图12 方位轴速度开环的频率特性Fig.12 Frequency characteristics of azimuth-axis speed open loop
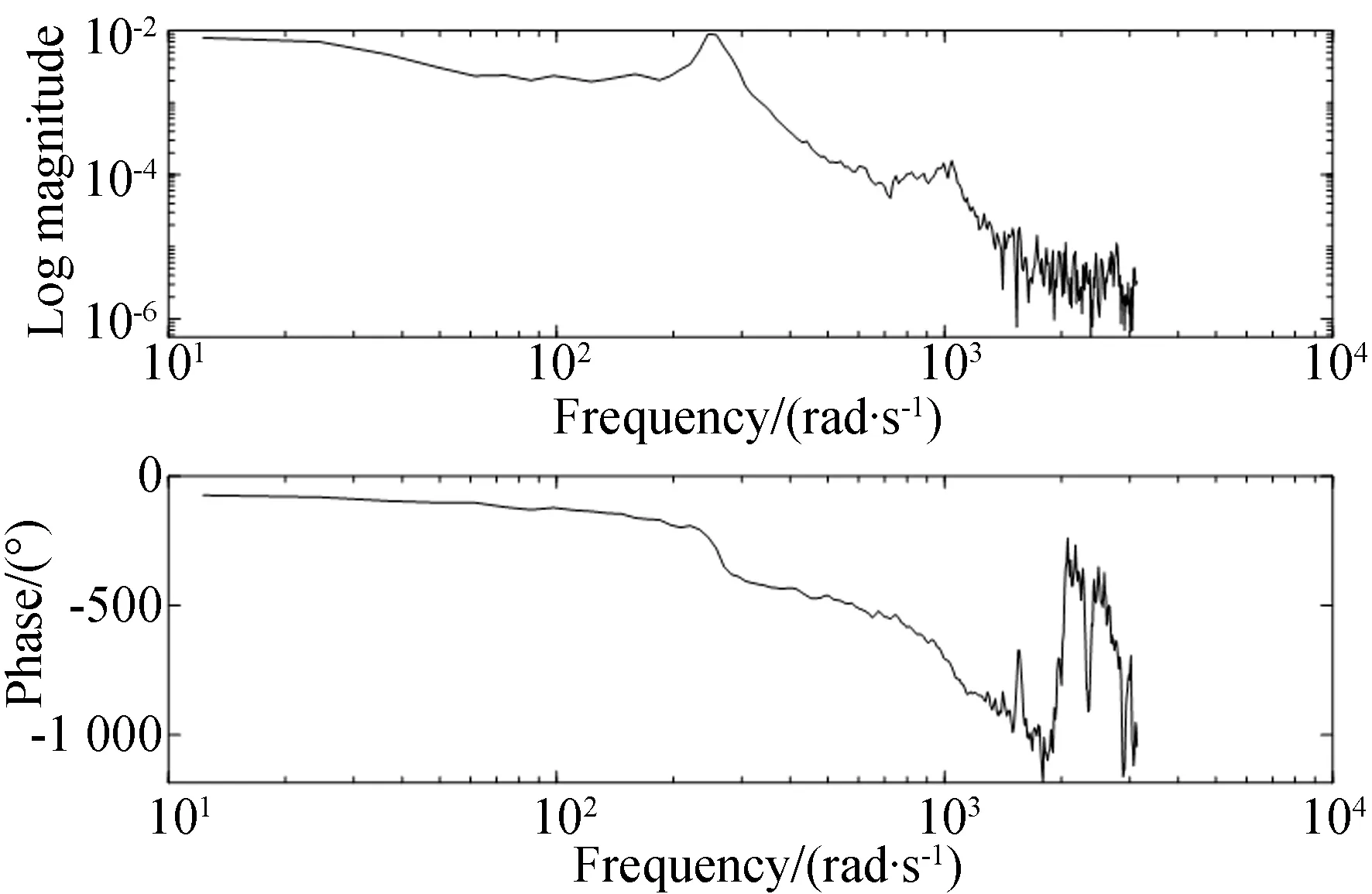
图13 俯仰轴速度开环的频率特性Fig.13 Frequency characteristics of pitch-axis speed open loop
4 外场飞行试验
外场飞行试验时,稳定平台安装在系留气球载荷舱底部,高光谱相机安装在稳定平台的俯仰框架上。俯仰零位时,相机光轴方向与地面的夹角为45°,安装情况如图14所示。系留气球的升空高度为300 m时,高空风速为3 m/s左右,高光谱相机进行空中对地观测成像,成像过程中稳定平台对气球平台在航向和俯仰方向的姿态变化进行角度补偿。

图14 稳定平台在系留气球上的安装Fig.14 Installation diagram of stable platform on tethered balloon
图15为外场飞行试验中获取的稳定平台陀螺数据。图16为高光谱相机中的监视相机拍摄的靶标图像。方位轴和俯仰轴的稳定精度分别为38.83 μrad(RMS)和37.26 μrad(RMS),均满足高光谱相机稳定成像50 μrad(RMS)的技术指标要求。
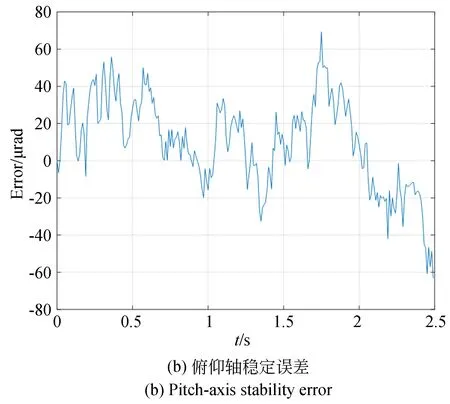
图15 外场试验陀螺稳定数据Fig.15 Gyro stability data in field experiment
图16 监视相机拍摄的靶标图像Fig.16 Target image taken by surveillance camera
5 结 论
本文设计了一台应用于系留气球的钢丝绳传动两轴稳定平台,实验室测试稳定平台的传动精度为5 μrad,传动误差不大于0.7%。方位轴和俯仰轴的开环控制伺服带宽分别为15 Hz和35 Hz,正弦跟踪精度的均方根误差分别为0.004 5°和0.004 3°。外场飞行试验测得稳定平台方位轴和俯仰轴的稳定精度分别为38.83 μrad(RMS)和37.26 μrad(RMS),两个轴的稳定误差均满足技术指标50 μrad(RMS)的要求。实验室测试和外场飞行试验的结果表明,钢丝绳传动具有高精度、无空回、质量轻等优点,能满足系留气球挂载高光谱相机稳定成像的技术指标要求,为今后的航空光电稳定平台设计提供了有利的参考。
猜你喜欢
幼儿园(2021年12期)2021-11-06
天津外国语大学学报(2021年1期)2021-03-29
VOGUE服饰与美容(2020年5期)2020-09-03
绿色科技(2019年22期)2019-12-30
高考·上(2019年1期)2019-09-10
趣味(语文)(2019年5期)2019-09-02
无锡商业职业技术学院学报(2018年3期)2018-06-29
中国修辞(2016年0期)2016-03-20
火控雷达技术(2016年2期)2016-02-06
小学生时代·大嘴英语(2015年7期)2015-11-23