机载托架自动校准系统的设计与实现
2020-07-04 06:20任会丽凌云科技集团有限责任公司
航空维修与工程 2020年4期
任会丽/凌云科技集团有限责任公司
0 引言
飞机装配时,惯导托架、左右速率陀螺成品托架等的水平和轴线校准都要求有很高的精度。目前的校准是通过测微准直望远镜(CZW)、校准靶板或光学象限仪来测试托架的倾斜度,从而判断哪些支撑点需要抬高而添加垫片,但该方法无法测算出各个支撑点应抬升的具体高度。另外,由于机载托架在水平和轴线方向具有很强的耦合性,调整任一方向都会影响另一个方向的调平精度[1],工作者需要反复添加垫片、测试数据,直到托架在水平和轴线方向的倾斜误差都达到某个范围内为止。这种校准方法不仅精度较低且耗时、费力,为了解决这些问题,有必要设计一种高精度、高效率并且操作简单的成品托架水平和轴线校准系统。
机载托架都是刚性的四点支撑平台托架[1-3],为了使机载托架各支撑点在调平过程中只做单向运动,本文运用调平精度较高的“循环多次”最高点不动调平方法[4],建立高精度机载托架校准的静力学数学模型。为了方便工作者的操作和使用,在建立高精度机载托架校准的数学模型后,运用VC 与Matlab 的COM 接口混合编程技术[5]开发机载托架自动校准系统,包括各个机载托架校准模块和可视化人机交互界面的开发,并对所建立的数学模型的可行性和稳定性进行机上验证。工作者只需要在该系统的主界面输入利用工装夹具测试的数据,就可直接得到相应机载托架的校准信息,包括各个支撑点精确的抬升高度和托架平台在各个方向的实时倾斜度。
1 机载托架自动校准系统的设计
1.1 机载托架平台静力学建模
对机载托架平台的动态调节过程进行数学分析,寻找平台倾斜角与四个支撑点之间的定量关系。如图1 所示,假设OX0Y0为水平坐标系,OXY 为平台所在的坐标系,平台相对于水平面的横倾斜角(沿X 轴方向)和纵倾斜角(沿Y 轴方向)分别为α、β。由于机载托架平台各支撑点在OXY 坐标系中的坐标是已知的,假定为(i,j,k),只要建立两个坐标系之间的坐标变换矩阵,就可以很方便地求出各支撑点在水平坐标系OX0Y0上的坐标。
若α≠0、β=0,平台坐标(i,j,k)变换到水平坐标系OX0Y0上的坐标为(i′,j′,k′),则根据坐标变换,可以得到

若α不变、β≠0,平台坐标(i,j,k)变换到水平坐标系OX0Y0上的坐标为(i0,j0,k0),则根据坐标变换,可以得到
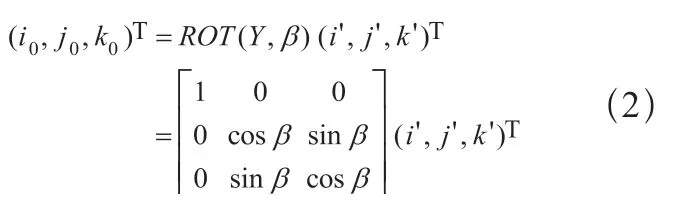
这样,由α、β变换之后,初始的平台坐标变换成水平坐标系OX0Y0上的坐标(i0,j0,k0),将式(1)带入式(2)得到
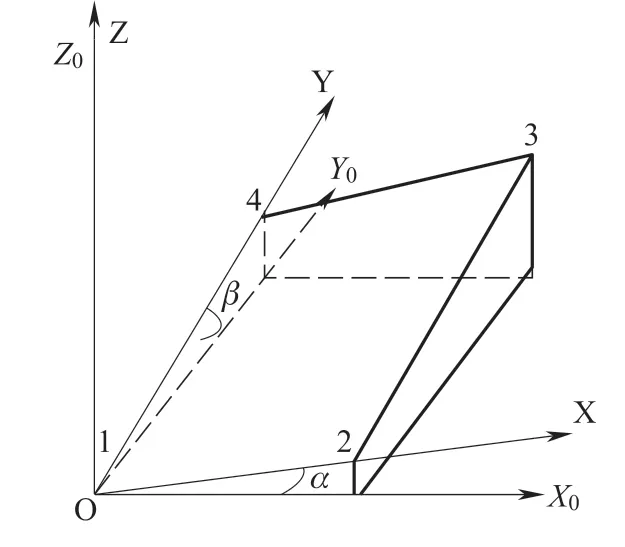
图1 托架平台倾斜示意图
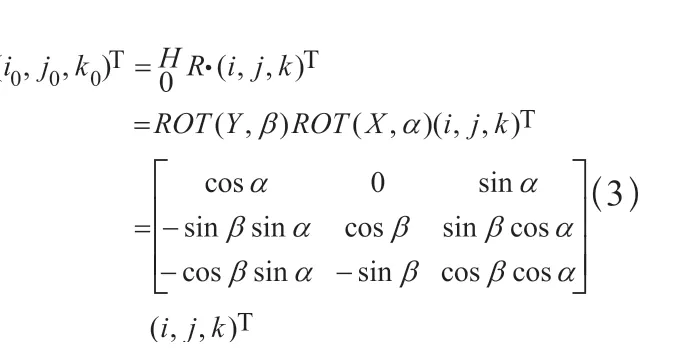
实际测得的试验数据中,横向和纵向倾斜角度都在100′以下,式(3)中,可以认为在平台校准过程中发生了微小的角度变化,则cosα=cosβ=1,sinα=α,sinβ=β。于是

同时,托架平台在水平坐标系OX0Y0上的坐标(i0,j0,k0)变为
1.2 “循环多次”最高点不动调平方法
平台调平的核心问题是如何使得四个支撑点处于同一高度。传统最高点不动调平法能精准解算出各个支撑点距最高点的位置误差,理论上运用该算法,对机载托架平台各个支撑点添加一次垫片就可以使其达到水平。但实际上,由于机载托架平台横向和纵向具有很强的耦合性,加之数据测试时存在误差等因素,且机载成品托架每个支撑螺钉的垫片厚度S 为一定值,属于离散量(S 分别为0.2mm、0.3mm、0.5mm、0.8mm、1mm、1.5mm、2mm、3mm),运用传统最高点不动调平法对机载托架进行调平时很难一次完成,需要反复调整才能达到最终的水平状态。因此,本文运用“循环多次”最高点不动调平方法[4],具体实现过程如图2 所示。
为了保证测试的精准性,在对机载惯导托架进行校准时,不选用受环境变化影响较大的传感器来测试倾角值,而是选用传统校准方法所用的可靠性良好的测微准直望远镜(CZW)、光学象限仪和校准靶板来测试托架平台的倾斜数据。为了获得平台的倾斜角度,在调平运算之前先对测试的数据进行预处理,如果横向或纵向倾斜角度的绝对值大于100′,则终止对惯导托架的调平,重新拆装。当横向和纵向倾斜角度绝对值都小于100′时,才对惯导托架进行调平校准。首先,判断横向和纵向的倾斜角度是否在惯导平台倾斜角误差δ=3′范围内,由图1 可知,只有|α|<δ且|β|<δ时惯导托架平台才能达到水平状态,否则应利用倾斜角度信息确定平台的最高点,且该点在调平过程中应保持不动,再利用最高点不动调平法解算出其他三个支撑点需要抬升的精确高度,添加相应厚度的垫片,然后,重新测试数据并判断平台的倾斜角度,如果不水平则再次进行调平,如此形成循环多次的调平方式,直到托架平台在横向和纵向的倾斜角度都达到在倾斜角误差δ=3′范围内为止。

图2 “循环多次”最高点不动调平方法流程图
1.3 运用VC 与Matlab 的COM 接口混合编程技术实现系统开发
需要在Windows 平台上完成机载托架自动校准系统的设计,且该系统应具备实时处理大量矩阵的能力。
采用一般的高级语言(如VC++)开发测量数据处理系统,将花费大量时间处理矩阵运算,增加了软件开发的劳动量,大大延长了开发周期,可能影响程序的执行效率与运行速度。
Matlab 有较强的处理矩阵运算的能力,但其只是一种解释性语言,执行效率低,且局限于Matlab 运行环境,也不利于软件开发。
机载托架自动校准系统不仅需要处理复杂的机载托架校准算法,还需要建立应用程序界面,因此很难采用VC++或Matlab 任何一个软件独立实现。因此,决定采用基于COM 接口的VC 与Matlab 混合编程技术来设计和开发机载托架自动校准系统。COM 是一种通用的对象接口,是以组件为发布单元的对象模型,遵循这种接口标准要求的任何语言都可以实现对它的跨应用平台调用。VC++6.0 环境下的MFC 技术是对庞大的标准Win32 API 函数的封装[5],提供了图形环境下应用程序的框架及创建应用程序的组件。通过采用VC++来开发应用程序的界面、采用Matlab 来实现应用程序的功能,就可以充分发挥他们各自的优势,缩短软件开发周期,降低软件开发难度和复杂度,提高软件开发效率。
运用VC 与Matlab 的COM 接口混合编程技术[6]开发软件的实现过程如下。
1)按照设计思想及设计原则,在Matlab 编辑器里编辑处理平台调平算法的程序,m文件必为函数文件,而非脚本文件。
2)利用Matlab 的comtool 工具创建COM 文件。
3)将封装COM 形成的相关文件拷贝至平台自动校准系统工程目录下,并添加至工程中。
4)编制COM 接口程序,使Matlab与VC++之间可无缝传递数据。
5)在VC++6.0 环 境 下 用MFC 技术设计人机交互界面,并调用相关函数,完成其他相关功能。
混合编程具体过程见图3。
1.4 机载托架自动校准系统软件设计
机载托架自动校准系统软件要求能够方便地进行系统程序的开发、测试、运行和维护,并能很好地进行系统管理,具有友好的人机模块,操作简单、信息齐全。机载托架自动校准系统的软件部分设计如图4 所示,系统可分为COM组件(Component 工程文件)和用户界面(WND 工程文件)两大部分。托架倾斜角度解算、惯导托架校准数学模型解算、左速率陀螺成品托架校准数学模型解算、右速率陀螺成品托架校准数学模型解算、加速度计成品托架校准数学模型解算等数据的处理都封装在COM组件中,用户界面主要负责机载托架倾斜信息的输入和解算结果的实时显示,用户界面和COM 组件之间的数据交互主要是通过MFC中的文档视图来实现。

图3 混合编程实现过程

图4 机载托架自动校准系统测试仪的软件结构
机载托架自动校准系统的界面如图5 所示。只需在系统主界面上输入测微准直望远镜(CZW)和光学象限仪测试的横滚、方位、俯仰方向的数据,点击需要校准托架的“按钮”,就能直接得到所校准托架各个支撑螺钉需要添加垫片的精准高度和托架平台各方向的安装误差。首先,判断各个方向的安装误差是否在校准精度0.87mrad(即3’)范围内,如果横滚、方位、俯仰三个方向的数据分别在误差范围内,则记录校准精度,结束校准过程;如果校准精度不在误差范围内,则按界面显示的各支撑点需要增高的数据,取相近的垫片为各个支撑点添加垫片,然后再用CZW 和光学象限仪测试横滚、方位、俯仰方向的数据并输入到界面,再次点击需要校准托架的“按钮”,判断各个方向的安装误差是否在误差范围内,如此循环直到将机载托架平台调平(各个方向在误差范围内)为止。
2 试验验证与结果分析
选择两架同型号、同批次的飞机作为试验对象,利用传统的机载托架校准方法对一架飞机的惯导托架进行调平校准,采用新设计的自动校准系统对另一架飞机的惯导托架进行校准,直到托架平台各方向的安装误差都在校准精度0.87mrad(即3’)范围内为止,记录各个方向的安装误差和拆卸托架添加垫片的次数,对两个惯导托架平台进行上述50 组试验,随机抽取部分试验数据,具体信息如表1 所示。
由表1 可知,传统校准方法的校准精度较自动校准系统低,且添加垫片的次数比自动校准系统多。本文提出的自动校准系统不仅提高了机载托架平台调平的精度,也大大提高了调平效率。
3 结论
运用“循环多次”最高点不动调平方法建立机载托架静力学数学模型,并运用VC 与Matlab 的COM 接口混合编程技术编制了高精度、稳定性较好的系统程序,并设计了信息齐全、操作简单的人机交互界面。由试验结果可知,本文所设计的机载托架自动校准方法无论是在调平精度还是调平效率方面都有很大的提高,更适合于飞机装配时对机载托架的校准。
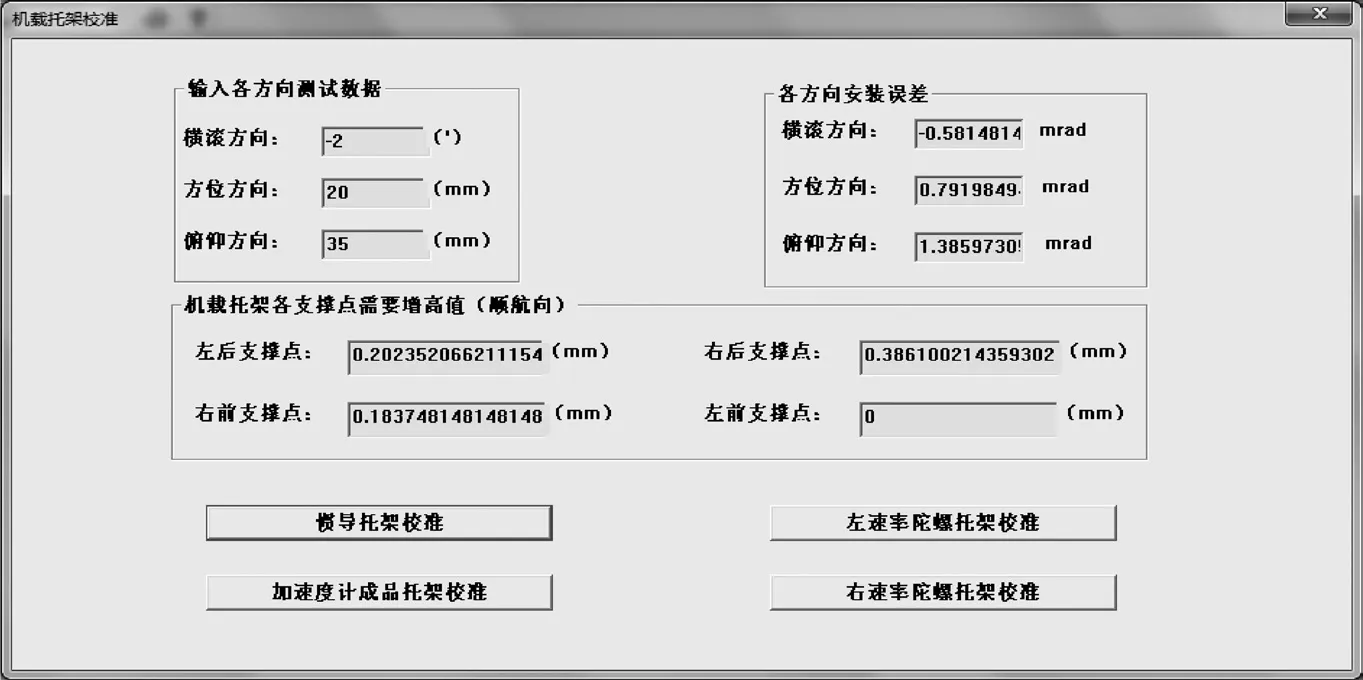
图5 自动校准系统界面

表1 随机抽取部分试验数据的对比信息
猜你喜欢
山东理工大学学报(自然科学版)(2021年4期)2021-05-12
汽车实用技术(2018年18期)2018-09-26
专用汽车(2018年7期)2018-07-24
价值工程(2017年31期)2018-01-17
百姓生活(2017年6期)2017-06-10
航天工业管理(2017年4期)2017-05-12
科学与财富(2016年24期)2017-03-29
幸福家庭(2016年10期)2016-11-25
专用汽车(2016年8期)2016-03-01
汽车实用技术(2015年8期)2015-12-26