
Location layout design of aircraft parts assembly based on MSVR
2020-07-02 03:04XiningLIZhihaoZHAO
CHINESE JOURNAL OF AERONAUTICS 2020年5期
Xining LI, Zhihao ZHAO
School of Mechanical Engineering, Northwestern Polytechnical University, Xi’an 710072, China
KEYWORDS Aircraft parts;Assembly;Hybrid particle swarm optimization genetic algorithm;Location layout;Multi-output support vector regression (MSVR);Perception data
Abstract Location layout of aircraft assembly is an important factor affecting product quality.Most of the existing re-searches use the combination of finite element analysis and intelligent algorithm to optimize the location layout, which are limited by numerical simulation accuracy and the selection and improvement of intelligent algorithms. At present, the analysis and decision-making technology based on field data is gradually applied in aircraft manufacturing.Based on the perception data of intelligent assembly unit of aircraft parts,a regression model of multi-input and multioutput support vector machine with Gauss kernel function as radial basis function is established,and the hyperparameters of the model are optimized by hybrid particle swarm optimization genetic algorithm(PSO-GA).GA-MSVR,PSO-MSVR and PSOGA-MSVR model are constructed respectively, and their results show that PSOGA-MSVR model has the best performance. Finally, the design of the aircraft wing location layout is taken as an example to verify the effectiveness of the method.
1. Introduction
Location layout has a very important impact on product quality during aircraft assembly. Reasonable location layout is an effective way to reduce assembly deformation and improve assembly accuracy. The design of the traditional positioning scheme relies on subjective experience, and usually it is arbitrary. Meanwhile it is difficult to meet the increasingly high assembly precision requirements. In recent years, relevant scholars have done some re-search on the problem of location layout optimization design, but most of these methods use finite element analysis and intelligent algorithm combination.1-6There are some problems. Firstly, the simulation simplifies the actual working conditions,so the accuracy is limited.Secondly, location layout depends on the algorithm selection.In addition, the existing research literature on location layout does not make full use of the measured data generated during the assembly and positioning of aircraft parts,and the production applicability is poor,especially for aircraft parts assembly.
With the development of intelligent manufacturing technology, intelligent assembly technology can effectively follow the time-varying products and tooling state to solve the problem of precision assurance. Therefore, research on aircraft intelligent assembly technology is of great significance to improve the positioning accuracy of aircraft assembly.In this paper,the intelligent assembly unit of aircraft parts is taken as the object.The intelligent assembly unit of aircraft components consists of assembly state perception module, analysis and decision module, and precise execution module. This paper is based on the data acquired by the state perception module.The data includes the following contents: the spatial position and the load of the locator in three directions, the key measuring points of the parts, the field temperature before adjusting attitude and the positioning posture of the locator after adjusting attitude.The mapping relationship is established by taking the data before and after attitude adjustment as input and output.In this way, the predictive location layout model is obtained.
The location layout is represented by multi-dimensional vector. The mapping relationship between these perception data and the location layout is not clearly expressed, which belongs to multi-input and multi-output regression modeling.At the same time, there is a strong nonlinear feature between the perception data and the corresponding positioning layout,and the data sample size is not large. The support vector regression (SVR) machine has the advantage of dealing with high-dimensional nonlinear problems under small sample.
SVR is a popular supervised data-driven approach for building empirical models from available data.Lee,et al.7proposed the localization problem in the WSN was formulated as a kernelized regression problem,which was solved by SVR and multi-dimensional SVR. Yan, et al.8studied a novel model modification method for SVR with the help of radial basis functions.The core idea of the method was to start with an initial SVR and modify it in a subsequent stage to extract as much information as possible from the existing training data.Zhang,et al.9proposed a hybrid PCA-PSO-SVR model to predict the grade efficiency of cyclone separators with the operating parameters based on 217 sets of experimental data. Tao,et al.10recommended the Modified Simulated Annealing(MSA) was used in order to surmount the disadvantage that the SVR model selects learning parameters depending on experience. Liang, et al.11proposed a fuzzy multilevel algorithm based on Particle swarm optimization (PSO) to optimize SVR machine in order to realize real time dynamic evaluation of drilling risk.Feng,et al.12advised the extended support vector regression (X-SVR) was used for the reliability analysis of dynamic systems via utilizing the first-passage theory. Zhang,et al.13dealt with iterated time series prediction problem by using multiple SVR models,which were trained independently based on the same training data with different targets.Liu and Wang14proposed the network traffic forecast model of SVR algorithm optimized by global artificial fish swarm algorithm(GAFSA). Karimipour, et al.15suggested that SVR is more authentic approach for the regression with little-size datasets.Pan16recommended a method of constructing radial basis function (RBF) proxy model based on cross-validation technology, in order to overcome the shortage of lower accuracy and large error of exiting RBF modeling methods for surrogate model of optimization design. Clarke, et al.17established the SVR model for attribute reduction. The comparison of engineering example data with response surface model, radial basis function network model and Kriging model showed that the method had the advantages of strong robustness and high accuracy.Wang,et al.18completed the construction of the prediction model between sheet metal structure parameters and sheet metal deformation energy by using the least squares support vector machine.
Based on the perception data of intelligent assembly unit of aircraft parts, a regression model of multi-input and multioutput support vector machine with Gauss kernel function as radial basis function is established,and the hyperparameters of the model are optimized by hybrid particle swarm optimization genetic algorithm (PSO-GA). The paper is organized as follows:Section 2 presents multi-output support vector regression modeling(MSVR)method;the hyperparameter optimization based on hybrid PSO-GA is elaborated in Section 3;Section 4 provides validation examples to illustrate the proposed approach;finally,Section 5 is devoted to the conclusion.
2. Multi-output support vector regression (MSVR) modeling method
For the MSVR problem,one of the solutions is to use multiple single-output SVRs, that is, one regression is performed for each output component with a support vector regression machine. Although this method is simple and easy to implement,the process is cumbersome and inefficient,and the accuracy is not high. For multi-dimensional output systems,multiple regression models should be created. In order to improve the regression accuracy, it is necessary to select the appropriate model parameters for the regression model of each output variable. Especially in high-dimensional systems or when dealing with large data volumes,the regression efficiency is too low after modeling. In addition, there is a strong correlation between multiple output variables. The above method cuts the internal relationship between multidimensional data,and the accuracy is reduced. At the same time, the errors generated by multiple univariate regressions will be amplified after combination. If the errors accumulate, eventually the model regression will be failed.19It is necessary to study a new multidimensional output model, which requires maintaining the integrity of the data to enable complete multidimensional variable regression. Retaining the relationship between multidimensional input variables can improve the accuracy and robustness of multidimensional variable regression models.


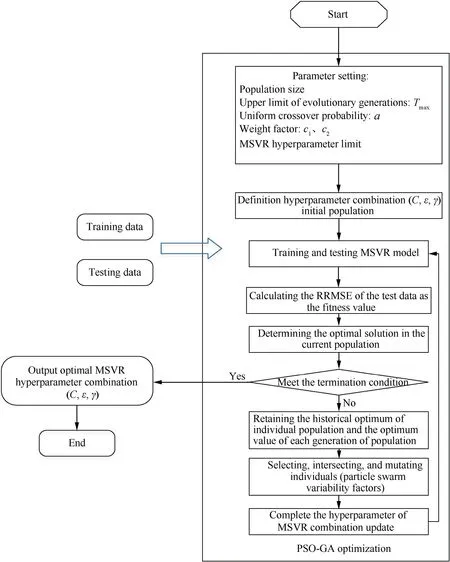
Fig. 1 PSOGA-MSVR modeling process.
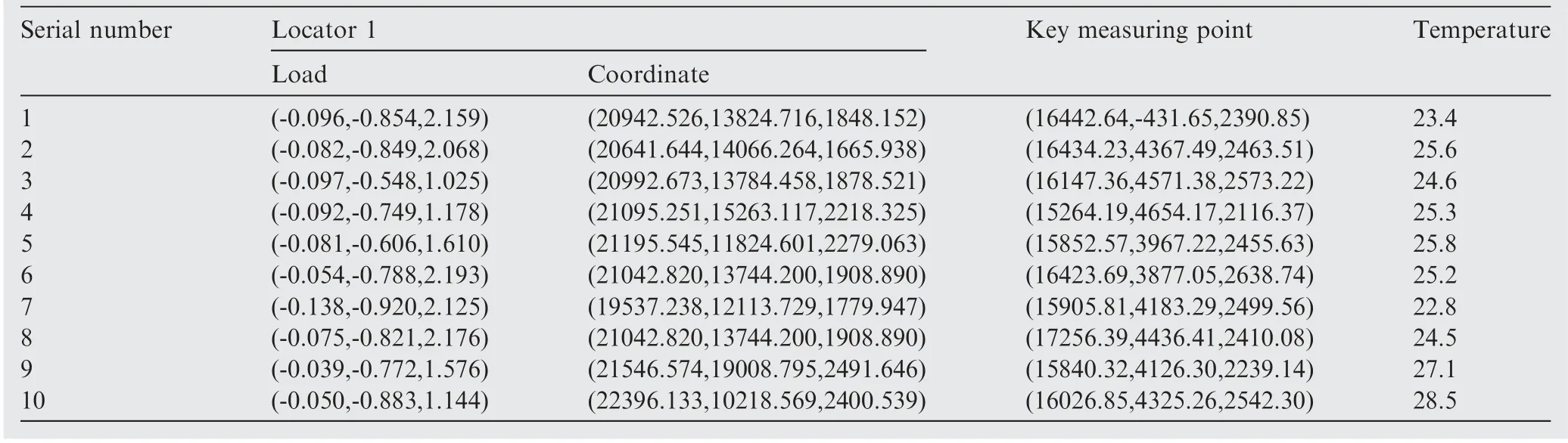
Table 1 Aircraft wing posture adjustment perception data - Characteristic input.
The main functions of the LIBSVM toolbox are svmtrain and svmpredict. Svmtrain is used for training the algorithm.The calling mode is model=svmtrain(train_output, train_input, options), where: train_output and train_input are thetraining data input and output respectively; options are a list of parameters that are used to set algorithm parameters. The parameter selections made in this paper are set to: svmtrain-s3 -t2 -g0.5 -c100 -p0.01.
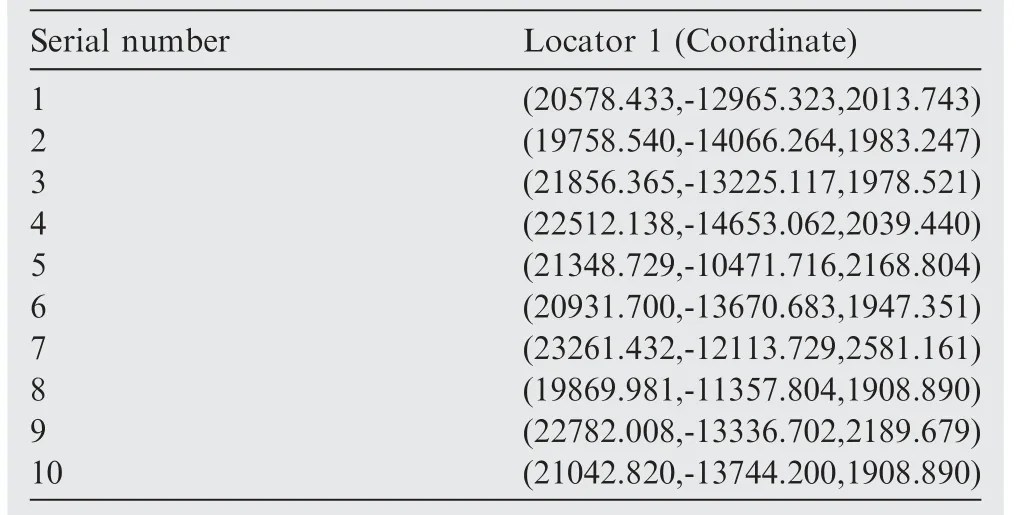
Table 2 Aircraft wing posture adjustment location layout optimization - Characteristic output.
Experimental steps:
1) The samples of n=80 are generated, and then 20 samples are randomly selected as test samples.
2) Selecting parameter combination C =100, ε = 0·01,γ = 0·5, the samples are trained using the MSVR algorithm proposed in this paper.
3) Selecting parameter combination C =100, ε = 0·01,γ = 0·5, the multidimensional output SVR model is divided into several single-dimensional output SVRs,and the samples are subjected to regression training using the LIBSVM toolbox.
4) The test data are brought into the regression model after the training is completed,and the regression fitting value corresponding to the test input data is obtained.The test sample prediction value-yiis compared to compare the relative root mean square error RRMSE of the data output value and the error value e in different dimensions to compare the accuracy of different methods.
The experimental results are shown in Tables 3 and 4 and Figs. 2 and 3 below.
4.2. Experimental analysis of enhanced location layout prediction model
In order to verify the correctness of the proposed method,this paper selects the data set of the multi-dimensional output model above to carry out numerical experiments. The GAMSVR, PSO-MSVR and PSOGA-MSVR prediction models are established respectively. The prediction results verify the feasibility, effectiveness and superiority of the PSOGAMSVR model.
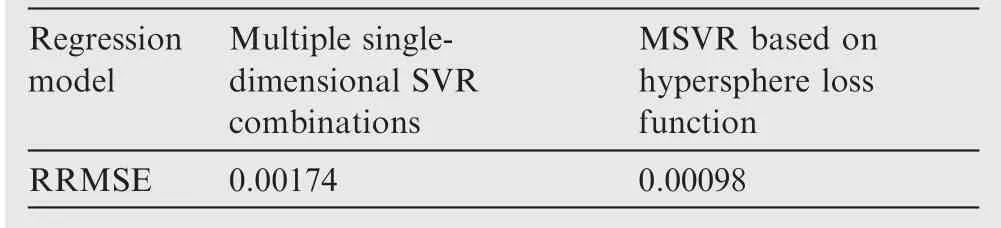
Table 3 Comparison of test error results of different methods of location perception data.
Table 4 Comparison of generalization time of different method models.
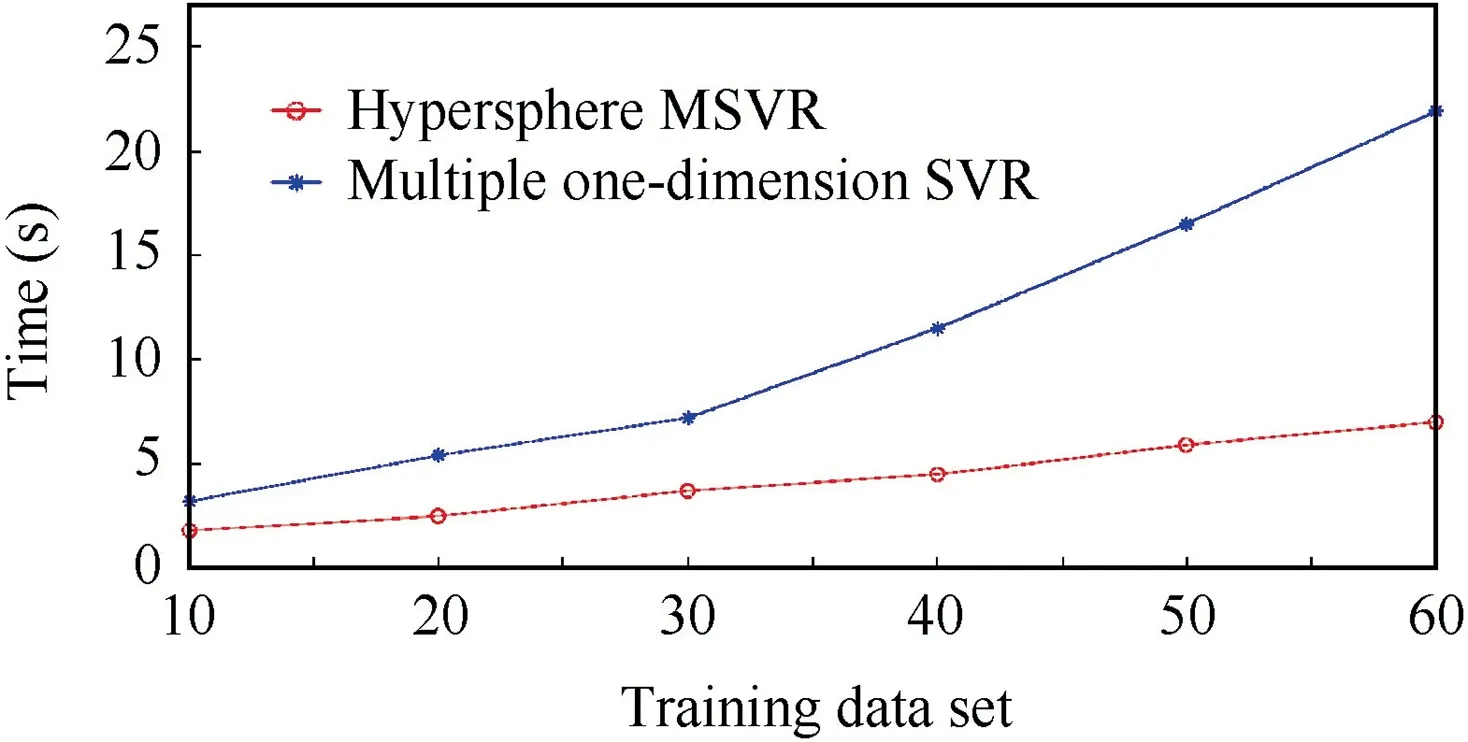
Fig. 2 Different model regression training time.
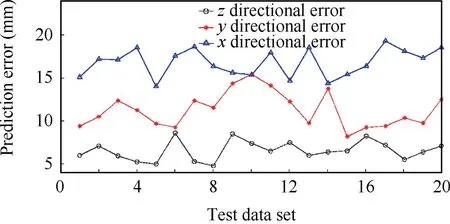
Fig. 3 MSVR single locator generalization error results in different directions.
In this paper, the Matlab software environment and the MSVR model built above are used for simulation experiments.RBF is selected as the kernel function. RRMSE is defined as the fitness function. To speed up the convergence, the determined population size is 30,and the maximum number of iterations is 100. The population is initialized and the parameters of three optimization algorithms (GA, PSO and GAPSO) are set:
●GA parameter settings: Crossover probability a is 0.85, the probability of variation is P=0.01.
●PSO parameter settings: c1·c2=1.5, ω=1.
●PSO-GA parameter settings: Crossover probability a is 0.85, c1·c2=1.5, ω=1.
The training results of the hyperparameter combination C,ε,γ( ) of the three algorithms are shown in Figs. 4 and 5.At the same time, the optimal parameter combinations of different algorithms and the corresponding accuracy indicators are shown in Table 5.
4.3.Experimental verification of wing location layout prediction model
Based on the above research contents, the experimental verification work of this paper is mainly the verification of the aircraft wing attitude PSOGA-MSVR positioning layout prediction model.
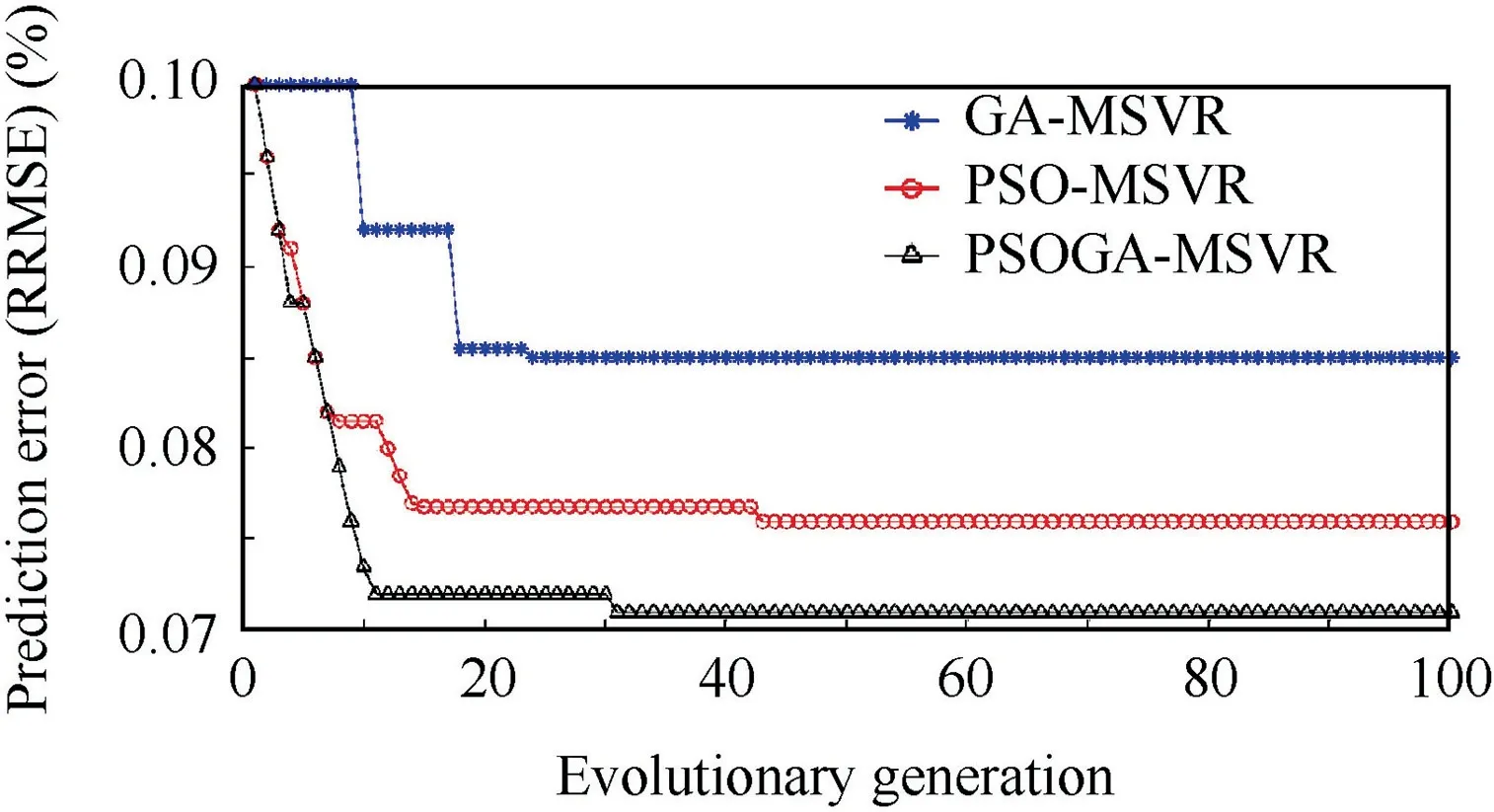
Fig. 4 GA/PSO/PSO-GA convergence curve comparison.
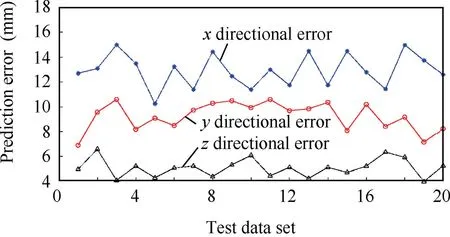
Fig.5 Comparison of different output dimension errors of PSOGA optimized test data.
According to the verification work of the wing positioning layout prediction model,this paper randomly selects ten sets of aircraft wing attitude monitoring data and its positioning layout information from the database. For each set of predicted positioning layouts,four MSVR models proposed in this paper are needed to generate spatial position data for four different locators. In order to visually evaluate the prediction accuracy of the MSVR model established in this paper, the average relative error MAPE is defined as one of the accuracy evaluation indicators of the location layout:

For the detection of the accuracy of the wing positioning layout, l does not represent the number of measurement sample,but the number of positioning points representing the wing location layout,that is,the number of locators.Here,the positioning point is not represented by a single locator, but the combination of the four locators represents the wing location layout.
Experimental analysis is carried out in accordance with the above procedure, and the results are shown in Table 6 and Figs. 6-9.
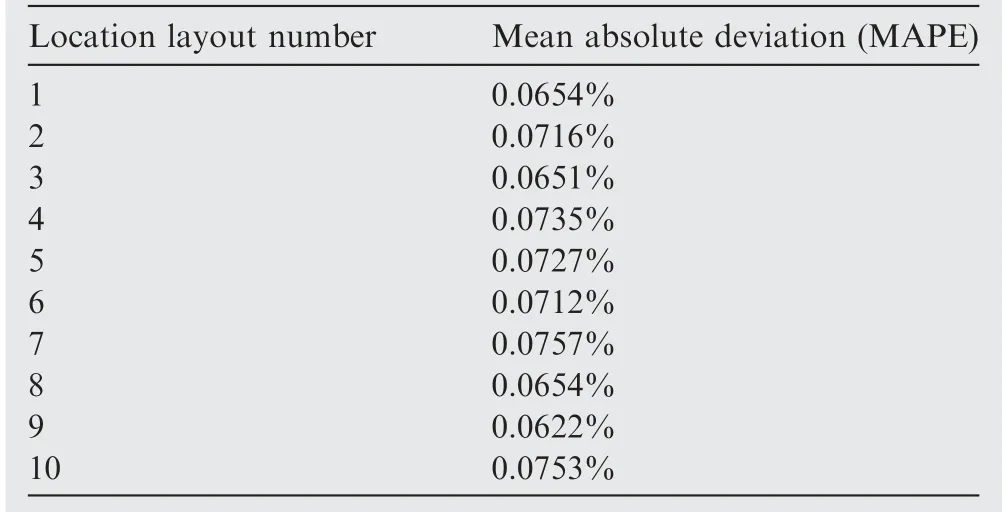
Table 6 PSOGA-MSVR model prediction results compared with experimental data.
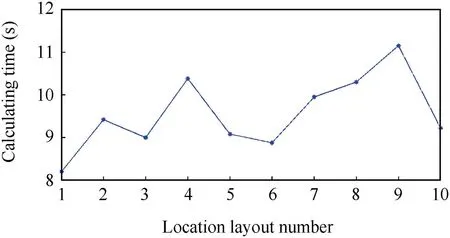
Fig. 6 PSOGA-MSVR model location layout verification calculating time.
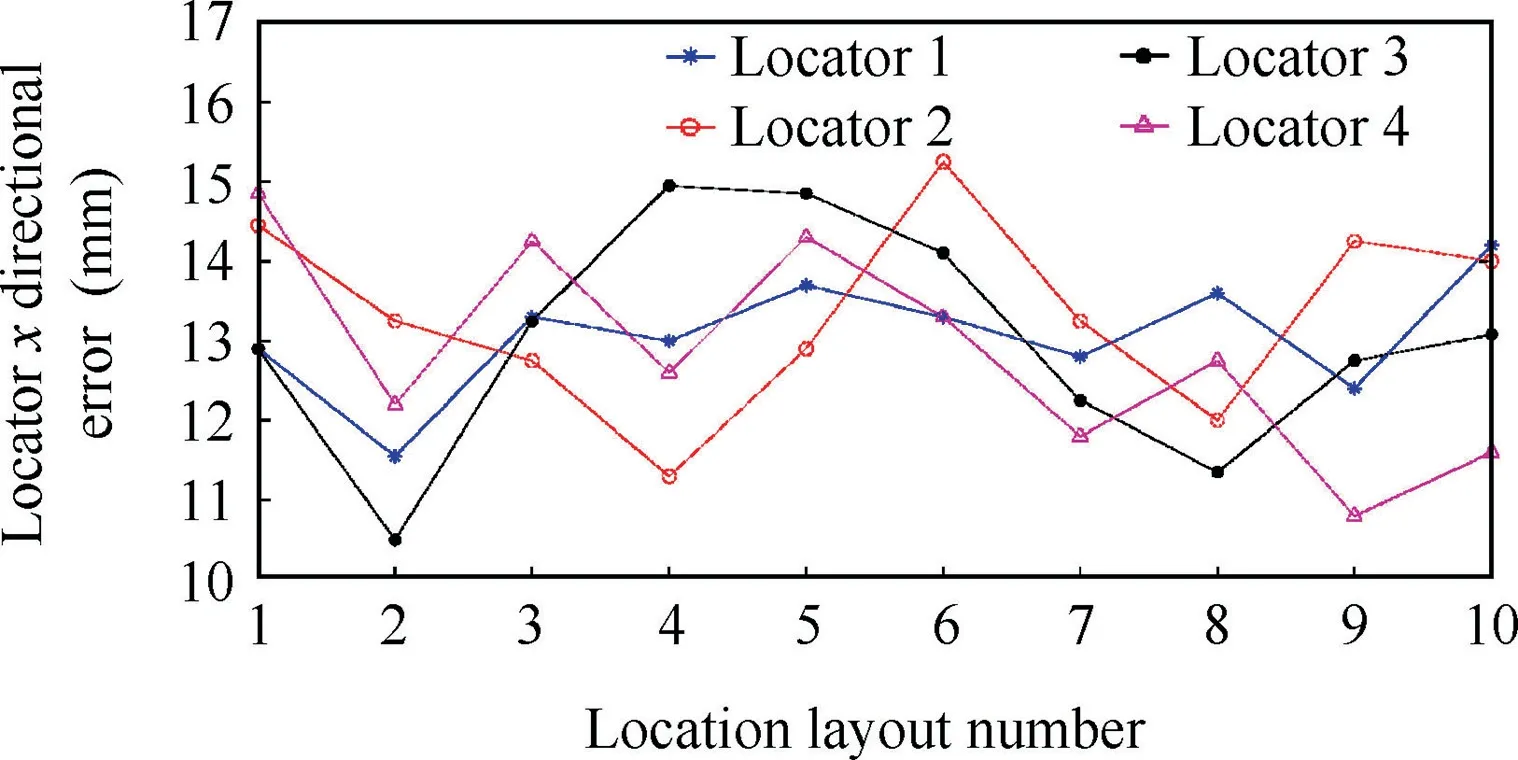
Fig. 7 Wing location layout x directional error calculating result.

Table 5 Comparison of different algorithm optimization results and precision.
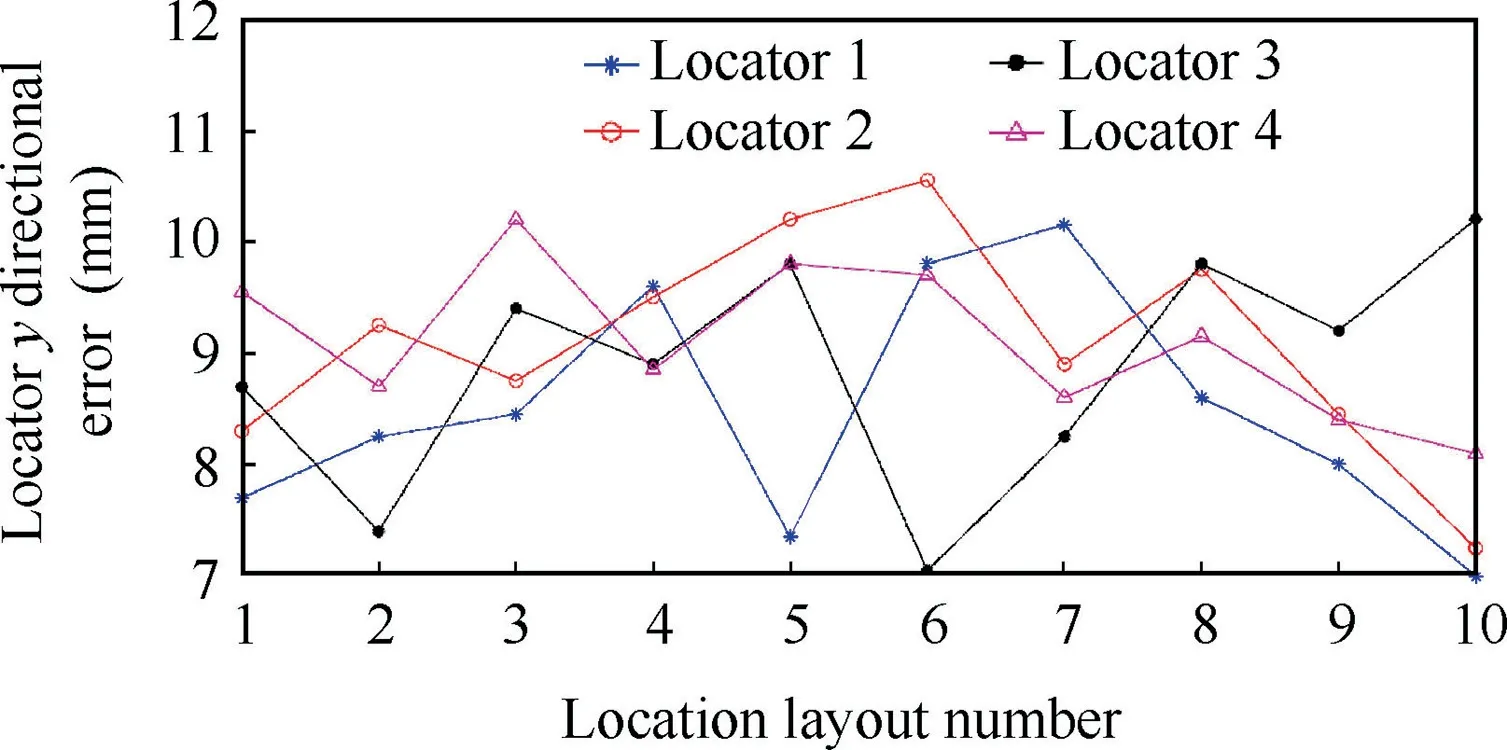
Fig. 8 Wing location layout y directional error calculating result.
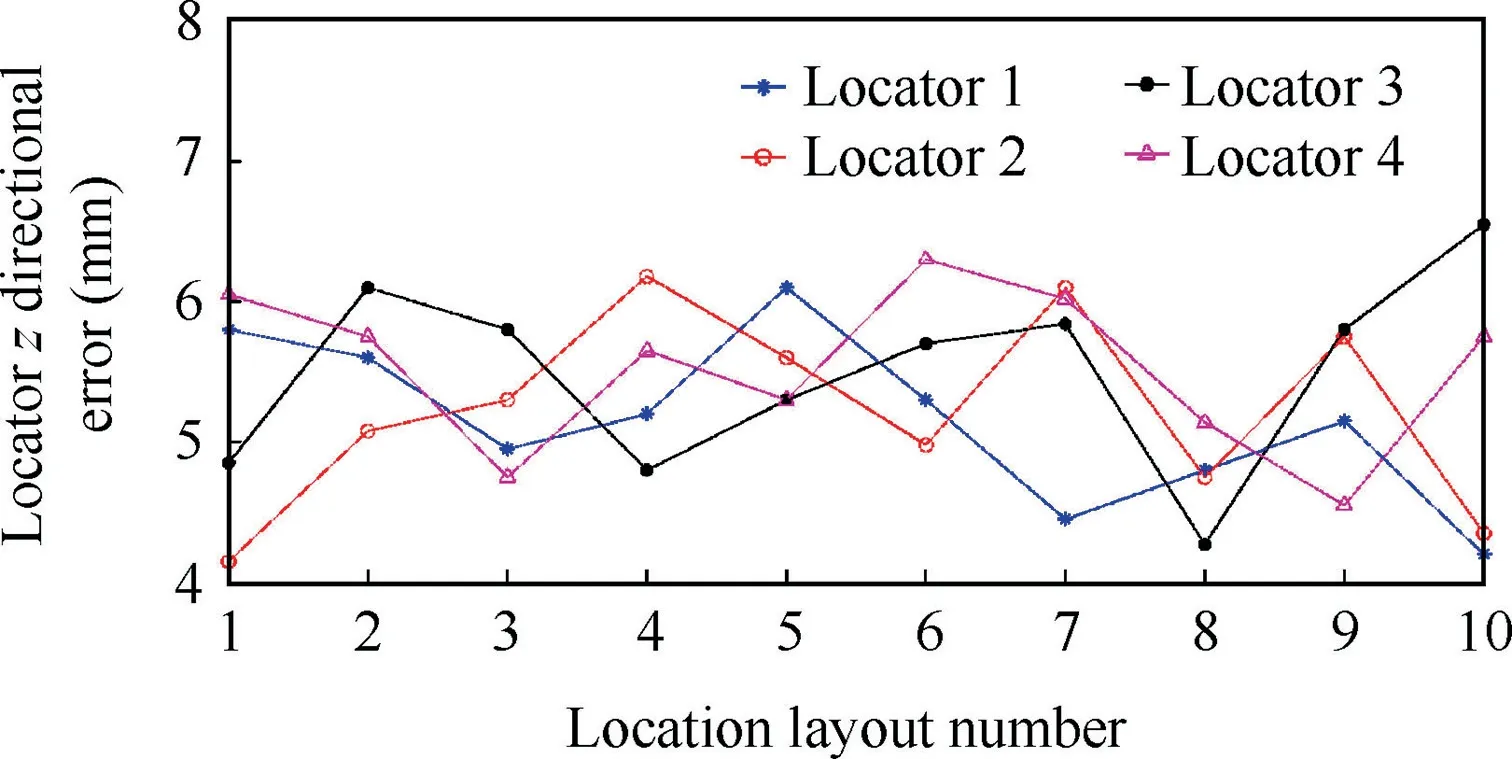
Fig.9 Wing location layout z directional error calculating result.
5. Conclusions
(1) It can be seen from the results that the prediction accuracy and efficiency of the MSVR model based on the hypersphere loss function are higher than the splitting of the multi-dimensional output system into multiple single SVR output models. By analyzing the principle of model construction, the following reasons can be drawn: the construction of multiple single-dimensional output SVR combination models is relatively simple and straightforward, but this method ignores the influence of geometrical spatial correlation between different data dimensions. The established SVR model only shares some data and there is no intrinsic connection between them. It is foreseeable that in highdimensional output systems, the prediction error of this method will be larger, and as the number of singleoutput SVR models increases, the efficiency of support vector regression will become worse. At the same time,combined with the actual assembly requirements of the aircraft wing posture adjustment, it can be seen from Fig.3 that the spatial output history data of the locator that satisfies the attitude positioning accuracy, that is,the response output in the test data, is predicted by the MSVR model proposed in this paper. The locator and the position data in x、y、z different directions are not much different from the measured data.
(2) It can be seen from the comparative analysis of the output results that the RRMSE of the PSOGA-MSVR prediction model is smaller,indicating that the model has a relatively high prediction accuracy. It can be seen from Fig. 5 that compared with the other two optimization methods, the proposed particle swarm genetic hybrid algorithm is more efficient for solving the optimal combination of hyperparameter and has higher precision. At the same time,as can be seen from Fig.5,compared with the generalization error results in Fig.3,the output error of the single locator in different directions is smaller,and the result is closer to the true value.The PSOGA-MSVR model built in this paper not only has high precision,but also the error of each point is relatively stable and the fluctuation is small, which indicates that the model has the advantages of good precision and stability.
(3) It can be seen from the Table 6 that the maximum average relative error between the PSO-GA model prediction result and the 10 sets of experimental data is 0.0757%,and the relative error analysis result is within the acceptable range of engineering requirements. It can be seen from Fig. 6 that the time used for the calculation of the positioning layout using the method proposed in this paper is less fluctuating,and the total time is within 12 s,which basically meets the actual engineering requirements. At the same time, as shown in Figs. 7, 8 and 9,the prediction errors of different directions of different locator of the ten groups of location layout are less fluctuating. The location layout obtained by the proposed method only needs to be fine-tuned in combination with the actual engineering to meet the positioning accuracy requirements. Therefore, it can be concluded that the location layout design method based on PSOGA-MSVR model is more accurate and efficient.Therefore,according to the perception data-driven positioning layout analysis decision method proposed in this paper, it can provide theoretical guidance for aircraft assembly location layout design.
Acknowledgements
This research is supported by the Equipment Pre-research Project of China (No. 41423010202).
 CHINESE JOURNAL OF AERONAUTICS2020年5期
CHINESE JOURNAL OF AERONAUTICS2020年5期
- CHINESE JOURNAL OF AERONAUTICS的其它文章
- Experimental of combustion instability in NTO/MMH impinging combustion chambers
- Three-line structured light vision system for non-cooperative satellites in proximity operations
- Remaining useful life prediction of aircraft lithium-ion batteries based on F-distribution particle filter and kernel smoothing algorithm
- Flow characteristics around airfoils near transonic buffet onset conditions
- Experimental investigation of flow and distortion mitigation by mechanical vortex generators in a coupled serpentine inlet-turbofan engine system
- An improved prediction model for corner stall in axial compressors with dihedral effect