
Consensus disturbance rejection control of directed multi-agent networks with extended state observer
2020-07-02 03:03ShopnGUOZhongkuiLIYifengNIULizhenWU
CHINESE JOURNAL OF AERONAUTICS 2020年5期
Shopn GUO, Zhongkui LI, Yifeng NIU, Lizhen WU,*
a State Key Laboratory for Turbulence Complex System, Department of Mechanics and Aerospace Engineering, Peking University, Beijing 100871, China
b College of Intelligence Science and Technology, National University of Defense Technology, Changsha 410073, China
KEYWORDS Adaptive control;Consensus control;Distributed control;Disturbance rejection;Multi-agent systems
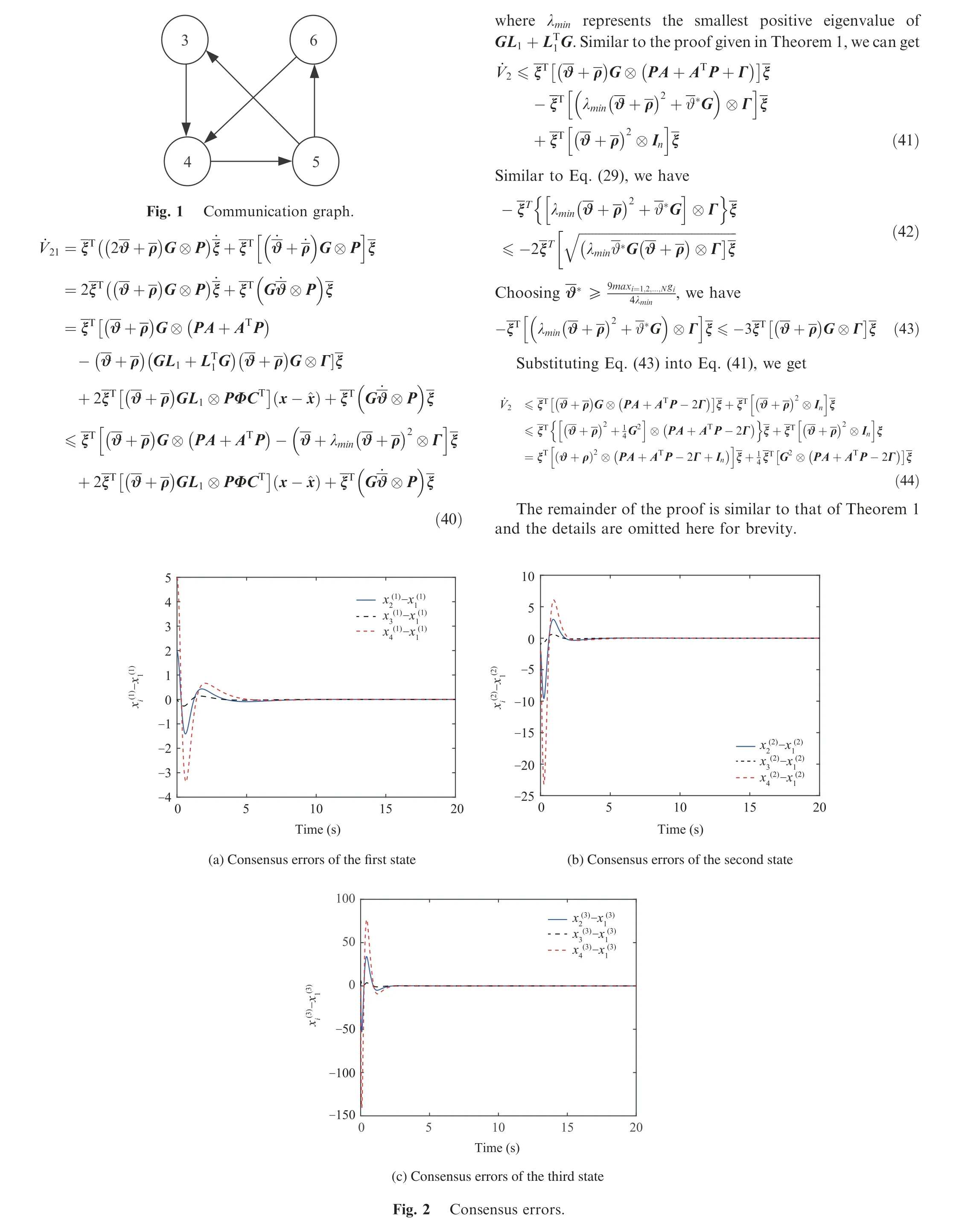
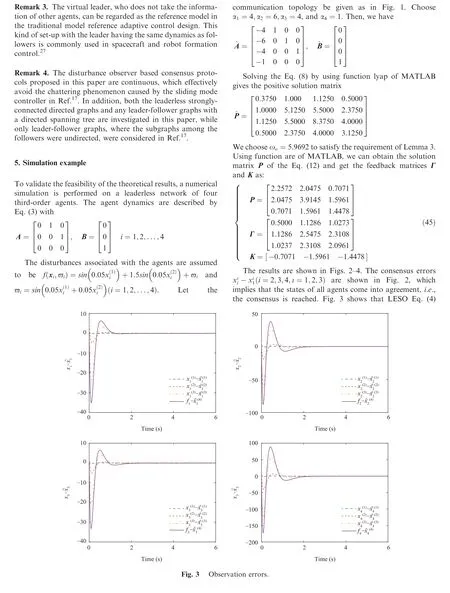
Abstract This paper investigates the consensus disturbance rejection problem among multiple high-order agents with directed graphs. Based on disturbance observers, distributed consensus disturbance rejection protocols are constructed in leaderless and leader-follower consensus setups.Different from the previous related papers, the consensus protocols in this paper are developed in a fully distributed fashion,relying on only the state information of each agent and its neighbors.Sufficient conditions are provided to guarantee that the asymptotic stability of high-order multi-agent systems can be reached with matched disturbances.
1. Introduction
Cooperative control of multi-agent systems is an emerging and cutting edge research topic in the field of systems and control over the past decades, owing to its application in military and civilian areas such as satellite formation, telecommunication relay, and target search.1-4All of these applications benefit from the improvements of the study on consensus control approaches. From different perspectives, many pioneers have put forward many insights into the consensus control problem and its related problems.5-8One common demerit in the most existing works is that the controller design requires the smallest nonzero eigenvalue information of the Laplacian matrix of the communication topology.9-12However, the agent cannot calculate and implement it without the knowledge of the entire communication topology.Therefore,although these consensus controllers can be implemented in a distributed fashion, they cannot be designed by each agent in a distributed way.In other words,they are not fully distributed. To overcome this limitation, Ref.13proposed fully distributed protocols to deal with the consensus problem for both the leaderless case and the leader-follower case with the use of adaptive parameters to estimate the unknown network connectivity.Further extension of Ref.13can be found in Ref.14, where researchers developed distributed adaptive consensus protocols for any communication topologies with a directed spanning tree.



 CHINESE JOURNAL OF AERONAUTICS2020年5期
CHINESE JOURNAL OF AERONAUTICS2020年5期
- CHINESE JOURNAL OF AERONAUTICS的其它文章
- Experimental of combustion instability in NTO/MMH impinging combustion chambers
- Three-line structured light vision system for non-cooperative satellites in proximity operations
- Remaining useful life prediction of aircraft lithium-ion batteries based on F-distribution particle filter and kernel smoothing algorithm
- Flow characteristics around airfoils near transonic buffet onset conditions
- Experimental investigation of flow and distortion mitigation by mechanical vortex generators in a coupled serpentine inlet-turbofan engine system
- An improved prediction model for corner stall in axial compressors with dihedral effect