
堆芯探测器组件拆除操作时间的参数化研究
2020-06-21 07:50余志伟安彦波王尚武
核科学与工程 2020年2期
李 娜,余志伟,安彦波,张 翼,王尚武,湛 卉
(中国核动力研究设计院 核反应堆系统设计技术国家重点实验室,四川 成都 610213)
“华龙一号”反应堆先进堆芯测量系统中使用的中子-温度探测器组件和水位探测器正常运行两个换料周期后需全部拆除,更换新的探测器组件,以满足堆芯测量相关测量功能要求。使用新型专用拆除装置完成的拆除操作应在装卸料机轨道上完成,因此需与装卸料操作穿插进行[1-4]。拆除效率直接影响装卸料机和厂房环吊的各项操作,从而影响停堆总时间,进而影响核电厂的经济性。所以有必要对拆除操作的流程进行合理设计和参数化分析,以确定最优的操作参数。本文基于拆除装置各操作的特性,对各环节进行了参数化建模,结合各动作的必要逻辑关系,对整个拆除流程进行梳理和研究,为拆除工艺流程各功能模块的参数确定提供技术基础,有效节约拆除操作时间。
1 探测器组件拆除工艺
“华龙一号”堆芯测量系统用从反应堆压力容器顶盖引出的中子—温度探测器组件的拆除操作,目前尚未有完全相同的实用案例。总长度近11 m的探测器组件下端约4 m长度,在反应堆运行时,插入特定位置处燃料组件中间的仪表管内。“华龙一号”核电厂换料操作期间,所有到寿期的探测器组件随上部堆内构件一起转移至堆内构件存放水池的上部堆内构件存放架上。待全部燃料组件卸除后,将装卸料机转移至反应堆堆坑侧,并吊离堆内构件吊具后,可将探测器组件拆除装置在装卸料机轨道上就位。拆除装置就位零点(操作中心)为上部堆内构件存放架的中心。
现有探测器组件的拆除操作包括定位、抓取、剪切、卷绕、暂存、存储6个基本步骤。分别由拆除装置自身集成的在线闭环定位装置、探测器组件抓具、剪切卷绕装置、暂存容器、大小车组件等完成。整个拆除操作流程如图1所示,其中,抓具的转移操作由厂房环吊的20t副提升机构执行,拆除装置行走运动由大小车组件执行。另外,用于存储拆除后探测器组件绕卷的高放存储容器在拆除装置主体功能部件(抓具和缩容装置)就位前已从乏燃料水池通过转运至堆内构件存放水池底部的工作位置,探测器组件拆除操作后也可单独转运至乏燃料水池,因此,在拆除过程运动建模中不考虑高放存储容器的运动情况。
图1 堆芯探测器组件拆除操作流程图
定位过程是通过拆除装置自身集成的在线闭环定位设备,将拆除装置的操作中心,调整至待拆除探测器组件中心正上方;抓取操作指下放拆除装置的抓具至缩容装置相应通道,下放并抓取待拆除探测器组件,后提升/拔出探测器组件至剪切高度;剪切操作指将探测器组件运行时位于压力容器外的一侧,约700 mm的部分(简称低放段)与探测器组件主体段剪切分离;卷绕缩容操作指将剪切后剩余的探测器组件主体段通过连续卷绕方式,拔出通道并缩容成卷;存储分为两部分,一为剪切端部的存储,通过抓具转移至低放存储容器。二为主体段绕卷的存储,绕卷卷制完成后暂时存放在拆除装置自带的暂存容器内,集满4个绕卷后,操作拆除装置运动至高放存储容器位置,将绕卷从暂存容器转移至高放存储容器最终存储。
2 拆除操作逻辑顺序分析
前文给出的探测器组件拆除操作的各基本操作中,定位和转运操作是针对一组4个探测器组件的,而抓取、剪切、卷绕、暂存是针对每一根探测器组件都必需的。因此,在评价拆除装置操作时间时以完成一组4个探测器组件的拆除为研究对象。
根据拆除装置的功能设计要求,各项操作间存在以下逻辑关系:
1)抓具就位于缩容装置后,下放夹具抓取并拔出探测器组件的过程中,缩容装置其他能动部件应处于停止状态;
2)探测器组件卷绕过程中,缩容装置除卷绕外其他能动部件应处于停止状态;
3)缩容装置在堆内构件存放水池上方运动时,缩容装置中除大小车外其余能动部件应处于停止状态;
4)缩容装置中暂存容器下放转移临时绕卷过程中,缩容装置中其余能动部件应处于停止状态。
基于以上要求得到拆除一组探测器组件满足时间先后关系前提下,所需各操作序列表如表1所示。
从表1可以看出,抓具的部分操作可与拆除装置的部分操作并行,为达到最高效率,存在以下关系:
1)缩容装置中在线闭环设备获得待拆除组件精确位置坐标时,抓具应已就位于该组件理论位置上方;
2)缩容装置卷绕并暂存操作完成时,抓具应已就位于下一组件理论位置上方。
3 拆除操作参数化
根据田湾VVER核电厂类似堆芯探测器组件拆除经验,完成一根探测器组件拆除的时间约为1 h,确定“华龙一号”完成4个一组探测器组件拆除现场要求的最长目标时间为不超过3 h。分别建立各操作的参数化模型,以获取拆除总时间方程。
3.1 拆除装置行走运动模型
拆除装置大小车组件放置在装置料机轨道上,可以执行平面双向运动的机电一体化运行。在整个探测器组件拆除过程中,拆除装置的主要位置包括初始零点、理论待拆除点、实际待拆除点、存放点;分别位于上部堆内构件存放架的中心处/位置1、拆除装置控制系统预置的每组4个待拆除探测器组件分布圆的理论中心处/位置2、每一个待拆除探测器组件的中心处/位置3和容器存放架的中心处/位置4。其行走运动简化模型如图2所示。

图2 拆除装置行走运动模型
3.2 厂房环吊行走运动模型
核电厂厂房用环形起重机(以下简称环吊)在核电站厂房安装期间用于起吊和处理设备安装的装置。在电站交付使用后用于每次反应堆停堆换料和反应堆厂房内设备维修所需的各种吊运服务。探测器组件拆除过程中,将利用环吊20t的副起升机构与探测器组件抓具吊耳连接,吊运抓具在低放存储容器位置和操作位置之间转移。其行走运动简化模型如图3所示。
图3 厂房环吊行走运动模型
3.3 抓具运行模型
探测器组件抓具定位至待拆除点(待拆除探测器组件中心后),首先需下放抓具至待拆除探测器组件夹持位置,所有探测器组件的下降高度相同,下降速度相同,待夹紧探测器组件后,提升并拔出探测器组件至剪切高度,理论提升速度相同。此时,抓具仍与厂房环吊保持连接,环吊在探测器组件实际位置/位置3处,保持不动。待剪切操作完成后,环吊将抓具转移至低放存储容器位置。简化的抓具运行模型如图4所示。
图4 抓具运行模型
3.4 剪切缩容运行模型
抓具定位至待拆除点下放至剪切缩容装置前,剪切缩容装置的夹持剪切模块应整体平移,提供抓具下放抓取探测器组件的通道。待探测器组件抓具将探测器组件抓取并提升至剪切高度后,剪切刀具平移、夹持并进行剪切。剪断后,抓具继续提升直至上限位置后,方开始卷绕。因探测器组件长度不同,卷绕时间不同。卷绕完成后,探测器组件绕卷平移至暂存容器上方并释放绕卷。该平移过程简化的运行模型如图5所示。夹持和剪切时间较短且相对固定,本次研究中忽略不计。
图5 剪切缩容运行模型
3.5 暂存容器运行模型
拆除装置通过大小车组件运行至高放存储容器位置,再下放暂存容器,每次下放高度相同,下放速度相同。待绕卷全部转移至高放容器后,提升暂存容器至初始位置,每次提升速度相同。简化的运行模型如图7所示。
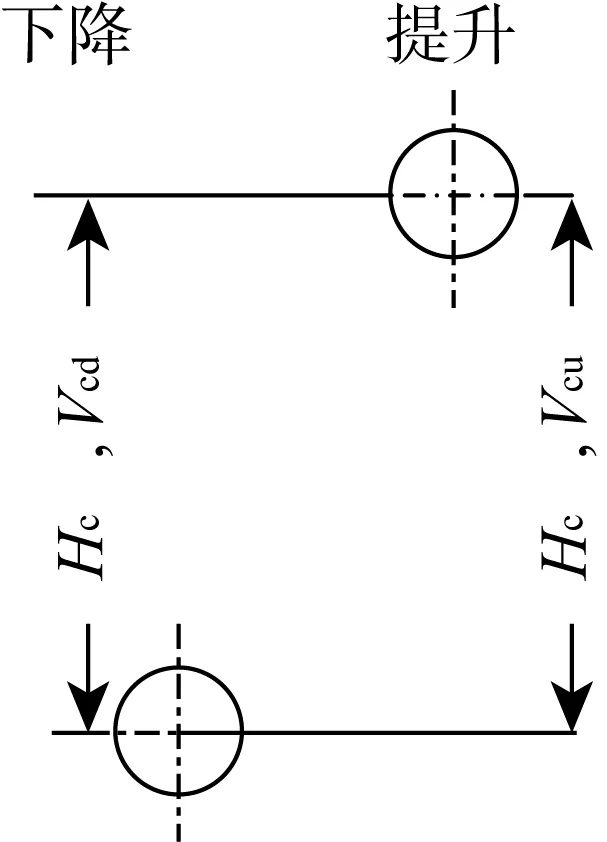
图6 暂存容器运行模型
4 各拆除操作时间参数方程
4.1 拆除装置行走
拆除装置大小车组件从初始零点到达该组探测器组件分布圆理论中心位置所花费的时间Td1为:
(1)
拆除装置大小车组件从探测器组件分布圆理论中心位置运动至本次待拆除组件精确中心位置所花费的时间为:
(2)
拆除装置大小车组件从待拆除组件中心位置运动至容器存放架的中心处所花费的时间为Td3:
(3)
4.2 抓具行走
抓具在低放容器和抓取位置(即待拆除探测器组件正上方)间的转移时间,由厂房环吊决定,假设环吊在位置3与位置5之间行走速度恒定,平均速度为为Vh,则抓具在低放容器与抓取位置间单程转移所需时间Tz1为:
(4)
抓具就位于缩容装置后,需下放夹爪夹紧探测器组件、拔出探测器组件,待剪切操作完成后夹爪归于零位。为避免探测器组件拔出过程受到损伤,抓具夹爪拔出提升速度不宜过快。此过程所需的时间Tz2为:
(5)
4.3 剪切卷绕
假设剪切卷绕装置水平往复运动速度恒定,则剪切卷绕装置在抓具就位前运动至待拆除点上方和剪切完成后回位至暂存容器上方的时间相等,均为Tj,则:
(6)
其中TjΔ为剪切探测器和卷绕从暂存容器上脱落至暂存容器内的总时间。
4.4 暂存容器存放
拆除装置到达高放存储容器正上方后,从暂存容器开始下放为初始状态,至与高放存储容器对接,再将暂存容器提升归于初始状态所需的时间Tc为:
(7)
4.5 操作优化
为了高效完成拆除操作,减少总体操作时间,抓具运动操作与缩容装置卷绕暂存操作时间应尽量匹配,即:
(8)
对于“华龙一号”核电厂,换料期间探测器组件随上部堆内构件存放堆内构件水池的固定位置,因此L4是确定的。Vh和Vhz为环吊的运行参数,可根据吊运设备的实际需求进行设定,最大值为10 m/min。为了获得最小的Tz1值,需在满足抓具平稳转移的前提下,尽可能快速的低空运动。
4.6 拆除操作总时间
由前文分析可知,完成一组4个探测器组件拆除所需花费的总时间应为:
(9)
或

(10)
根据Tz1和Tj实际计算值得大小,使用公式(9)或公式(10)进行拆除操作总时间的计算。
5 典型参数设计
5.1 设计参数
“华龙一号”反应堆厂房环吊、堆芯机械结构及探测器组件、装卸料机等设备的设计功能参数具体见表2。

表2 相关设备的运行参数值[5]
为简化计算提出以下假设条件:
1)环吊平移和升降速度相同,Vh=Vhz;
2)拆除装置在上部堆内构件上方移动时为低速区,取最远距离约4.5 m,Vxm=Vym=1 m/min;
3)拆除装置在上部堆内构件上方外移动时为高速区,取最远距离约6.5 m,Vxk=Vyk=2 m/min;

5)定义Tz1min为一组4个探测器组件Tz1的最小值,定义Tz1max为一组4个探测器组件Tz1的最大值,且取4Tz1=2(Tz1min+Tz1max);
6)定义Tjmin为一组4个探测器组件Tj的最小值,定义Tjmax为一组4个探测器组件Tj的最大值,且取4Tj=2(Tjmin+Tjmax)。
5.2 计算分析
分别基于不同已知参数,研究完成一组四个探测器组件拆除的总时间,与环吊转移速度(Vh、Vhz)和卷绕速度(W)的变化关系。
为满足公式(8),分别带入5.1节中确定的各参数值,得到公式(11):
(11)
若根据环吊的转移速度确定卷绕速度,代入公式(9)得到Tt,汇总数据如表3所示。

表3 L4=5 m,L6=11 m时的汇总数据
若根据卷绕速度确定环吊的转移速度,代入公式(11)得到Tt,汇总数据如表4所示。

表4 L4=8 m,L6=10 m时的汇总数据
从表3、表4数据得出:
1)即使对于距离高放存储容器最远处一组探测器组件,当环吊转移速度和卷绕速度最低时,完成一组4个探测器组件拆除操作所花费的连续有效最长时间仅为141 min,大大少于目标时间要求的3 h。
2)卷绕速度是影响探测器组件拆除时间的关键因素,提升卷绕速度可显著缩短整体拆除时间;
3)当以卷绕速度匹配环吊转移速度时,所需环吊转移速度不超过0.8 m/min,实际操作时,环吊转移速度可适当提高至1 m/min,环吊完成相关操作后,可停止在待拆除探测器组件上方等待下一步操作;
4)当以环吊转移速度匹配卷绕速度时,要求卷绕速度将超过0.7m/min,虽可以大大缩短整体拆除时间,但是高的卷绕速度不利于辐照后探测器组件的稳定卷绕。
6 结束语
本文以顺利完成一组4个探测器组件拆除所花费的时间为研究对象,较系统地对“华龙一号”堆芯探测器组件拆除流程进行了建模,并对拆除时间进行了参数化建模分析,给出了提高拆除效率的准则。结合工程实际,在已知数值参数的基础上,重点研究了环吊转移速度和拆除装置转移速度对拆除总时间的影响。经验证,基于此操作流程的拆除工艺所花费的理论拆除时间满足工程实际需求。拆除装置工程设计中各功能模块的运行参数的确定可借鉴本文研究结果。
符号表:
L1x:拆除装置坐标原点到待拆除探测器组件所在分布圆中心0°方向距离,m;
L1y:拆除装置坐标原点到待拆除探测器组件所在分布圆中心90°方向距离,m;
L2x:待拆除探测器组件所在分布圆中心与探测器组件中心0°方向距离,m;
L2y:待拆除探测器组件所在分布圆中心与探测器组件中心90°方向距离,m;
L3x:探测器组件分布圆中心与高放容器中心0°方向距离,m;
L3y:探测器组件分布圆中心与高放容器中心90°方向距离,m;
L4:低放容器与探测器组件中心距离,m;
L5:剪切卷绕装置往复运动距离,m;
L6:探测器组件卷绕段长度,m;
Vxm:拆除装置x方向慢速区移动速度,m/min;
Vxk:拆除装置x方向快速区移动速度,m/min;
Vym:拆除装置y方向慢速区移动速度,m/min;
Vyk:拆除装置y方向快速区移动速度,m/min;
Vh:环吊运行小车厂房内内任意两点间近似平均移动速度,m/min;
Vhz:环吊运行小车副提升(20 t)起升速度,m/min;
Vzd:抓具抓取探测器组件后提升速度,m/min;
Vzu:抓具下放至待抓取探测器组件处的速度,m/min;
Vj:剪切卷绕装置往复运动速度,m/min;
Vcd:暂存容器从初始位置下降至高放容器对接位置的平均速度,m/min;
Vcu:暂存容器从高放容器对接位置提升至初始位置的平均速度,m/min;
W:卷绕速度,m/min;
Hh1:环吊下放抓具到低放容器位置的高度,m;
Hh2:环吊下放抓具到缩容装置的高度,m;
Hz:抓具下放抓取探测器组件的行程,m;
Hc:暂存容器初始位置与高放容器对接位置间的距离,m;
TjΔ:剪切探测器和卷绕从暂存容器上脱落至暂存容器内的总时间,min。
猜你喜欢
中学生数理化·八年级物理人教版(2022年4期)2022-04-26
矿产勘查(2020年11期)2020-12-25
航空发动机(2020年3期)2020-07-24
小学科学(2020年1期)2020-02-18
百科探秘·航空航天(2020年12期)2020-01-22
模具制造(2019年10期)2020-01-06
读者·校园版(2019年24期)2019-12-10
小学科学(2019年12期)2019-01-06
小朋友·聪明学堂(2015年8期)2015-11-30
海军航空大学学报(2015年1期)2015-11-11
