2019 年国外导航技术发展综述
2020-06-16 11:38薛连莉沈玉芃宋丽君陈效真
导航与控制 2020年2期
薛连莉,沈玉芃,宋丽君,陈效真
(1.北京海鹰科技情报研究所, 北京 100074;2.西安建筑科技大学信息与控制工程学院, 西安710055;3.北京航天控制仪器研究所, 北京100039)
0 引言
2019年8月,美国国防部(U.S.Department of Defense,US DoD)公开了其2018年11月的《国防部定位、导航和授时(Positioning Navigation and Timing,PNT)整体战略》报告[1],其目标是利用现代化全球定位系统(Global Positioning System,GPS)基础功能及多种附加PNT信息源,以模块化开放系统集成方法为美军联合部队提供精确、可靠和弹性的PNT能力,维持并强化美军及其盟军在所有作战领域的军用PNT优势。报告表明,美国已开始全面提升其军用PNT技术能力,继续增强GPS抗干扰能力,开发多源PNT服务能力。作为世界前沿技术发展的标杆,以美国为首,欧盟、俄罗斯、印度、日本等国家和地区2019年纷纷效仿,不断推动卫星导航、惯性导航、视觉导航、量子导航、定位与授时等技术发展,并取得一定成果。
1 卫星导航
卫星导航技术是指采用导航卫星对地面、海洋、空中和空间用户进行导航定位的技术。作为PNT的增援力量,已经建造或正在建造的全球导航卫星系统(Global Navigation Satellite System,GNSS)有美国的GPS、俄罗斯的GLONASS、欧盟的Galileo、中国的BeiDou等全球性系统,以及日本的QZSS和印度的NavIC等区域性系统。
(1)美国继续扩大GPS II的应用范围,全面推进GPS III导航卫星研究与部署
2019年7月,美国国家航空航天局(National Aeronautics and Space Administration,NASA)表示将在“Artemis”登月计划中采用GPS为猎户座飞船的宇航员和地面操控员、月球空间站Gateway以及月球表面任务提供导航解决方案。相关研究团队正在开发一种可以获取GPS位置信息的特殊接收机NavCube,该接收机将MMS Navigator GPS和SpaceCube(一种可重构的空间飞行高速数据处理系统)融合在一起。NASA团队已对月球GPS接收机的性能进行了仿真并获得了满意结果,并在2019年年底完成了月球NavCube的硬件原型。
2019年6月,美国Harris公司宣布已向美国Lockheed Martin公司交付了第6个任务数据单元(Mission Data Unit,MDU)有效载荷,用于美国空军下一代GPS III导航卫星。MDU有效载荷是第11颗GPS III及后续卫星的核心,在前10颗卫星导航载荷的基础上进一步改进性能,精度提升了3倍,抗干扰能力提升了8倍;实现了70%的数字化,优化了发射器、抗辐射处理器、原子钟等系统互联性,以增强导航信号;可将GPS III卫星的在轨寿命延长至15年,比当前在轨的GPS卫星高出25%。2019年11月,美空军称计划研制并于2023年向地球静止轨道发射导航技术卫星-3(NTS-3),该卫星安装实验型天线,使用灵活安全的信号,增加自主能力,可在轨重编程,通过数字签名增强抗欺骗能力,波束覆盖区域可调,在受攻击或干扰后可快速恢复。NTS-3是美空军继GPS之后,40年来首次开展的开拓性项目。图1为目前已在轨或即将在轨运行的NTS-1、NTS-2和NTS-3卫星。

图1 NTS-1、NTS-2和NTS-3卫星Fig.1 Diagram of satellites NTS-1,NTS-2 and NTS-3
(2)俄罗斯继续提高GLONASS的导航精度
2019年4月,俄罗斯航天国家集团公司(Russian Space National Corporation)副总经理Urlichich透露,2025年俄罗斯GLONASS的导航精度将提高25%。Urlichich在Moscow导航学术会议上表示,2025年前系统高轨段预计部署6颗卫星,首颗卫星将于2023年投入运行,这将使半个地球导航精度提高25%。2020年后,GLONASS在国外部署的地面站数量将从6个增加到12个,俄罗斯境内则从19个增加到45个。目前,GLONASS有26颗在轨卫星,其中的23颗运行正常。图2为已在轨运行的GLONASS-K卫星。

图2 GLONASS-K导航卫星Fig.2 Diagram of GLONASS-K navigation satellite
(3)欧盟的Galileo卫星导航系统再出故障,聚焦GPS拒止环境下新型导航技术的研发
2019年7月,欧洲全球导航卫星系统局(European Global Navigation Satellite Systems Agency,GSA)发布了Galileo系统服务降级告警,目前在轨26颗卫星的信号均不能达到最低的导航性能要求,且未给出明确的恢复时间。另据国际卫星导航系统监测评估中心称,Galileo系统疑似在7月10日14时出现卫星导航信号异常,其广播星历不能正常更新,全部卫星处于一种持续的非正常状态。Galileo是欧盟自主发展的导航卫星系统,由30颗卫星组成,包括24颗工作卫星和6颗备用卫星,计划于2020年完成星座建设。此外,Galileo系统2017年也曾出现多颗卫星星载原子钟失效故障。图3为Galileo卫星导航系统体系结构。
图3 Galileo卫星导航系统体系结构Fig.3 Architecture of Galileo navigation satellite system
2019年10月,欧洲导弹集团(MBDA Missile Systems Inc,MBDA)和空客防务与航天公司(Airbus Defence and Space)、法国宇航院(ONERA)合作为未来远程巡航导弹系统发展一种新的导航技术,该技术利用卫星通信信号使导弹在射程范围内保持导航精度。MBDA称卫星通信辅助导航技术将作为英法合作的导弹材料/组件创新与技术合作(MCM-IPT)计划下的弹性与自主卫星通信导航(REASON)项目的一部分而进行首次演示,REASON项目旨在评估采用特定卫星信号作为辅助导航手段的技术和系统级可行性。MBDA牵头了历时一年的REASON项目研究,并提供用于评估的性能指标,空客公司负责概念系统及其演示,法国宇航院提供仿真环境。
(4)印度NavIC卫星导航系统接口规范获准应用
2019年10月,全球无线通信标准组织(3GPP)已经接受了印度NavIC卫星导航系统的接口规范[2]。根据此许可,NavIC可以集成应用于智能手机和平板电脑等设备中。接口规范的获准应用极大地促进了印度移动电信业的发展,同时也促进了NavIC在整个亚太地区的应用。相对于目前使用的美国GPS系统,需要位置信息的智能电话和蜂窝物联网(IoT)设备将开始使用NavIC系统,这将促进NavIC技术在4G、5G和物联网(IoT)大众市场的应用,而与NavIC相关的IC及其产品的设计研发也将给印度公司和创业公司带来发展商机。随着系统在其他国家的推广应用,芯片及其产品也有着极大的市场发展潜力。NavIC由ISRO研发,目前有8颗在轨卫星,7颗用于导航,1颗用于消息传递,覆盖印度及其周边地区1500km的区域,计划将进一步扩展系统的应用。图4为印度NavIC卫星导航系统的示意图。

图4 印度区域卫星导航系统NavICFig.4 Diagram of Indian regional satellite navigation system NavIC
在卫星导航领域,一方面,以美国为首的导航大国持续推进导航卫星的研发与部署,不断提升导航系统精度;另一方面,为确保GPS拒止环境下的导航功能,各个国家积极开发新型导航技术及相关替代导航技术。
2 惯性导航
惯性导航技术是一种通过测量飞行器的角速度/线加速度,并自动进行积分运算,获得物体瞬时速度和瞬时位置数据的技术。惯性导航系统的设备都安装在运载体内,工作时不依赖外界信息,也不向外界辐射能量,不易受到干扰,是一种自主式导航系统。作为惯性导航系统的核心,以陀螺为代表的敏感器件是决定惯导系统性能的关键因素。
(1)美国陆军继续采购基于激光陀螺的惯性导航系统,激光陀螺仍是陆用战车、导弹等武器装备的重要选择之一
2019年9月,美国陆军合成司令部(U.S.Army Forces Command)宣布与Honeywell公司签订了价值3790万美元的战术先进地面惯性导航装置(TALIN)5000型采购合同,预计2023年9月完成。TALIN 5000系统尺寸为5.4in×7.6in×8.6in,质量为13lb,可在-46℃~+71℃环境中工作;在18V~32V直流电下工作时,功耗小于26W;使用标准的内部三轴惯性传感器,角速率为200(°)/s;平均故障间隔时间超过50000h,可连接多种接收机设备。该系统采用Honeywell公司的环形激光陀螺技术和加速度计,提供GPS拒止环境下的导航,适用于苛刻的军事和商业环境,可用于军用车辆、主战坦克、火炮系统、雷达和卫星通信稳定器、导弹发射器等。图5为TALIN 5000惯性导航装置的示意图。

图5 TALIN 5000惯性导航装置Fig.5 Diagram of TALIN 5000 inertial navigation unit
(2)国外不断推出光纤惯性导航系统,干涉型光纤陀螺惯性系统性能接近激光陀螺惯导系统,并逐渐用于战略武器
2019年5月,美国Northrop Grumman公司推出了光纤惯性导航系统SeaFIND,可提供与MK39环形激光陀螺罗盘系列惯性导航产品相同的性能水平,且尺寸大大减小,仅为250mm×250mm×127mm,质量仅为4.9kg。SeaFIND可满足小型舰艇的需求,包括无人潜航器、无人水面艇、近海巡逻艇及其他中小型水面舰艇。2019年11月,美国海军宣布将从2020财年开始通过战略系统项目发展新技术,以将现役三叉戟D5潜射战略导弹的使用期限延长至2080年,并持续保持导弹的作战能力现代化。三叉戟D5导弹延寿项目(D5 LE)进展顺利,在2019财年完成了5次飞行测试,D5 LE2项目工作重点之一是将导弹使用的静电陀螺升级为光纤陀螺,以提高导弹的打击精度,这标志着干涉型光纤陀螺惯性系统逐渐用于战略武器。图6为SeaFIND惯性导航系统示意图。

图6 SeaFIND 惯性导航系统Fig.6 Diagram of SeaFIND inertial navigation system
(3)在DARPA项目支持下,微机电(Micro Electro Mechanical System,MEMS)陀螺精度不断提高,并有望实现光纤陀螺替代方案
在DARPA微型速率积分陀螺(Micro Rate Integrating Gyroscope,MRIG)项目支持下,美国Michigan大学的研究人员成功研制了一种Q值达154万的真空封装熔融石英微谐振陀螺,零偏稳定性达0.0103(°)/h。此外,2019年4月,Honeywell公司报告了其用于平台稳定的MEMS面外陀螺性能结果,实现了优于0.006(°)/h1/2的角度随机游走和0.2(°)/h的零偏稳定性。作为驱动和检测模态下的特征传感器,频率间隔大于700Hz,从而允许带宽大于300Hz。HG6900 IMU将集成这些传感器,体积为259cm3。2019年9月,Honeywell公司推出了基于MEMS技术的HGuide i300 IMU和HG4930 S-Class IMU两款新型IMU,力求实现小型化、低功耗和经济高效的光纤陀螺替代方案[3]。图7为HG4930 S-Class MEMS IMU产品示意图。
(4)以美国、法国为首的国家继续推进半球谐振陀螺的研究,半球谐振陀螺性能不断提高、尺寸不断减小,在航天、航空、车辆、船舶等导航领域有着广阔的应用前景
2019年8月,美国Northrop Grumman 公司披露其在多年半球谐振陀螺研究的基础上,正在开发新型LR-450 IMU中的毫米半球谐振陀螺,专为质量更轻、成本更低的小型平台而设计[4]。2019年9月,赛峰电子与防务公司(Safran Electronics &Defense)报道了半球谐振陀螺的最新进展,基于该陀螺的BLACK-ONYXTMDUAL CORE HP 惯性导航系统质量小于 25kg,尺寸小于 0.028m3,功耗小于50W,精度达 1nmile/120h。凭借着半球谐振陀螺的超高SWaP性能,GEONYXTM惯性导航系统可用于火炮和战车的精确导航和指向,SpaceNaute惯性参考系统已被欧洲Ariane6太空发射器选用,Sterna超轻寻北仪可用于士兵指向应用和便携式系统[5]。图8为赛峰电子与防务公司的惯导系列产品。

图 7 HG4930 S-Class MEMS IMU 产品Fig.7 Diagram of HG4930 S-Class MEMS IMU

图8 赛峰电子与防务公司基于HRG 技术的惯导系统Fig.8 INS based on HRG Technology developed by Safran Electronics & Defense
在惯性导航领域,光学陀螺技术目前处于最成熟阶段,未来其精度从战术级、导航级逐渐延伸到战略级;MEMS 陀螺目前已在战术级占据主导地位,后续在微纳米技术和微加工艺等发展的推动下,精度将覆盖导航级;半球谐振陀螺在同等精度陀螺中具有体积质量优势,并逐步在空间、航空、航海等领域开展应用,成为近期惯性技术领域研究热点之一[6]。
3 其它导航
3.1 天文导航
天文导航建立在惯性参考系基础上,运用天体测量仪器来获取天体相对于测量点的天体方位和高度等信息,并解算出导航信息。常用的天文导航仪器有星体跟踪器、天文罗盘和六分仪等。
星体跟踪器能从天空背景中搜索、识别和跟踪星体,并测出跟踪器瞄准线相对于参考坐标系的角度。2019年5月,美国空军研究实验室(Air Force Research Laboratory,AFRL)计划签订一份天文辅助导航技术研发合同,降低GPS 拒止环境中制导、控制的风险,特别是在沙漠、水、雪和冰等地形恶劣的区域。研究重点是开发一种星体跟踪器,能够可靠地对9km ~24km 高度进行天文观测。星体跟踪器应能全天候工作,满足苛刻的环境要求,必要时提供指向能力。
3.2 视觉导航
视觉导航是通过摄像机对周围环境进行图像采集,并对图像进行滤波和计算,完成自身位置确定和路径识别,并做出导航决策的一种导航技术。美俄长期开展图像、激光、无线电等信号的特征提取与频谱分析,融合被动图像数据、数字海拔地形数据等可用信息,相继建立了基于视觉信号源的特征数据库。针对环境地图信息完整时的路径规划问题,利用超平面定义无碰撞区域,实现了密集障碍物环境下的稳定避障。
2019年3月,Draper实验室开发了Monarch系统,该系统使用摄像机图像和惯性测量来计算单位移动时位置和方向的变化,是视觉辅助导航的一种形式。2019年4月,美国宇航局机构选择Draper实验室对多环境导航仪(DMEN)进行飞行测试,以测试精确登陆月球所需的基于视觉的导航技术。该系统包括惯性测量单元传感器,其算法功能强大将传感器数据处理为导航解决方案,从而提供了视觉惯性测距和基于视觉地形的绝对定位的功能。此外,Draper实验室还提出一种SAMWISE视觉辅助惯性导航系统,能够在充满障碍物的室内和室外环境中进行高动态飞行,在开放的户外环境中进行了高达20m/s的飞行,位置误差约为3%。
此外,德国München工业大学的团队设计了一种低成本无人机,可在没有GPS的环境中进行视觉导航,不需要人工地标或环境的先验知识,系统由单目即时定位与地图构建(SLAM)系统、扩展Kalman滤波器和用于生成转向指令的PID控制器组成,实现了4.9cm(室内)和18.0cm(室外)的平均精度)。美国喷气推进实验室(Jet Propulsion Laboratory,JPL)提出了一种通用的面向行星着陆的地形相对导航方案,试验结果表明该方案的导航精度优于10m。在此基础上,NASA开发了着陆器视觉系统。
3.3 数据库匹配导航
数据库匹配技术主要包括景象匹配定位技术、地形地貌匹配技术、地图匹配技术、重力匹配技术、地磁匹配技术等。
重力匹配技术方面,侧重发展低漂移、高精度的重力传感器以提高水下动态重力测量精度,设计新的多传感器数据融合方案完成重力仪的水下定位。日本Tokyo大学利用了Micro-G Lacoste公司新式的重力仪L&RS-174,用自主式水下航行器较大范围测量的重力数据重复精度可达0.1mGal,重力场的空间分辨率可达75m。
地形地貌匹配技术方面,Draper实验室开发的一种地形相对导航系统于2019年9月11日在California的Mojave沙漠通过装载在Masten空间系统公司的Xodiac火箭上进行了测试。
地磁匹配技术方面,迫切需要精确的地磁场模型和地磁图制备技术。2019年,韩国先进科技研究院(Korea Advanced Institute of Science and Technology,KAIST)提出了一种结合两个对称卷积网络(CNN)和归一化互相关(NCC)的最新方法,最佳和最差地磁剖面的平均匹配率在98.6%以上。
3.4 仿生导航
仿生导航技术已开展了仿生光流、偏振光、类脑和地磁导航等方向的研究,在算法和器件上还有很大的发展空间。受器件灵敏度、加工工艺与材料的限制,仿生导航的稳定性和灵敏度还达不到较高水平,未来可利用生物基因工程与微纳加工制造技术改进现有的仿生导航器[7]。
仿生光流方面,美国Minnesota大学的研究人员于2019年介绍了一种自适应光流算法。通过逐步使用更多部分的图像信息,在不利条件下(如在黑暗、无纹理地板上飞行时)精确地估计了四旋翼飞行器的水平速度,提高了精确度。
偏振光导航方面,日本Tokyo工业大学的研究团队设计了非正交结构的小型偏振光导航传感器,与磁传感导航水平相当,回远点实验误差为0.5m(大约在 4m×2m范围内)。法国Aix-Marseille大学的研究团队设计了一种仿生天体罗盘应用于蚂蚁机器人的自主导航方法。实验结果显示,稳态航向误差为0.3°(晴天)~1.9°(多云),这种新的光学罗盘适用于自主领域机器人导航任务。德国Würzburg大学的Jundi团队发现偏振信息被编码在粪甲虫的视神经叶、前视神经结节、球茎和中央复合体(红色通道和红色大脑区域)中,在中央复合体处理后,信息被传递到胸神经节的运动控制中心的下降神经元,接着粪甲虫中央复合体的拟议信息流与其他昆虫的信息流一致。
3.5 量子导航
量子传感技术极限精度高,且体积减小后的精度衰减小,可利用量子导航等新型导航技术实现导航转型。根据定位方式的不同,在卫星有源导航系统与惯性无源导航系统的基础上分别发展出了量子有源导航系统和量子无源导航系统:量子有源导航系统采用发射和接收量子信号的方法,定位过程通常使用卫星作为信号源;量子无源导航系统使用量子传感器设备进行定位,不需要外部信号,通常通过检测加速度来定位[8]。
量子有源导航中,需重点关注的有光子纠缠态的制备,捕获、跟踪和瞄准系统及技术,量子时钟同步技术等。其中,量子态精确操控与全局纠缠的研究成果表明,目前可实现5量子态全局纠缠,可精确操控20个量子态并实现量子纠缠[8]。
量子无源导航中,原子陀螺、加速度计和原子钟是量子无源导航系统的核心模块,它们的性能直接影响着系统的定位性能。美国将芯片级原子钟作为十大未来先进技术之一予以优先支持,并制定了10年的发展计划。目前,美国Symmetricom公司生产的芯片级原子钟产品功耗为125mW,体积为16cm3,频率稳定度约为3×10-10τ-1/2。英国帝国理工学院开发了一种基于冷原子的加速度计,稳定性比传统的高约1000倍,并作为了潜艇量子导航系统的一部分。在DARPA的ACES计划支持下,美国喷气推进实验室(Jet Propulsion Laboratory,JPL)、NIST研究院与Honeywell公司三个团队开发的新一代芯片级原子钟在性能优化上取得突破性进展,关键性能参数提高了1000倍[9],具体如图9所示。随着原子惯性传感器精度的不断提高,由此类传感器构成的惯性系统精度有望达到5m/h的近地导航极限精度。

图9 ACE计划下三个团队的研究过程与结果Fig.9 Research process and results of the three teams under the ACE program
3.6 全源导航
全源导航就是利用所有可利用的导航信息源为用户提供卫星信号拒止时的高精度PNT功能,满足不断变化的任务需求与环境要求,实现低成本、快速系统重构、在线配置和即插即用的新兴组合导航系统。该系统以惯性导航技术为基础,通过天文、无线电、相机、磁力计和电台等多种辅助传感器信息集成融合协同,利用所有可能利用的导航信息源,包括惯性导航、卫星导航、视觉导航、协同导航等,形成能克服单一导航系统缺点和弊端的组合导航系统,提高导航系统的容错性与自适应性。全源导航定位涉及到光、电、磁、力、声等跨域几十种传感信息,各传感器信息的数学模型、时空基准、噪声类型、质量和一致性等均存在差异,且信息表征随外界环境和时间不断变化,如何实现各传感器信息的智能融合是全源导航必须解决的科学问题。与单一导航技术相比,这种自主性的导航技术将是未来智能导航的发展方向。
2010年,全源导航的概念正式被提出。美国DARPA设立了全源导航系统计划,该项目分为三个阶段实施,分别致力于导航算法与软件架构、系统集成与方案测试以及演示验证等方面的研究。美国Massachusetts理工学院(MIT)开展了基于三叉树的传感器最优子集在线选择方法研究,实现了传感器的有效利用并提高了组合导航精度。美国Georgia理工学院研究了基于因子图的多源信息融合算法,实现了比传统扩展Kalman滤波器更高的精度。美国Stanford大学重点研究了导航系统故障诊断试验平台,完成了系统故障诊断与容错技术的试验验证。据DARPA在2019年6月公布的最新结果显示,美国空军研究实验室(Air Force Research Laboratory,AFRL)采用惯性、摄像头、磁力计等传感器,在卫星拒止环境下实现了20m的定位精度,并在舰艇、飞机、车辆上完成了演示[10],如图10所示。
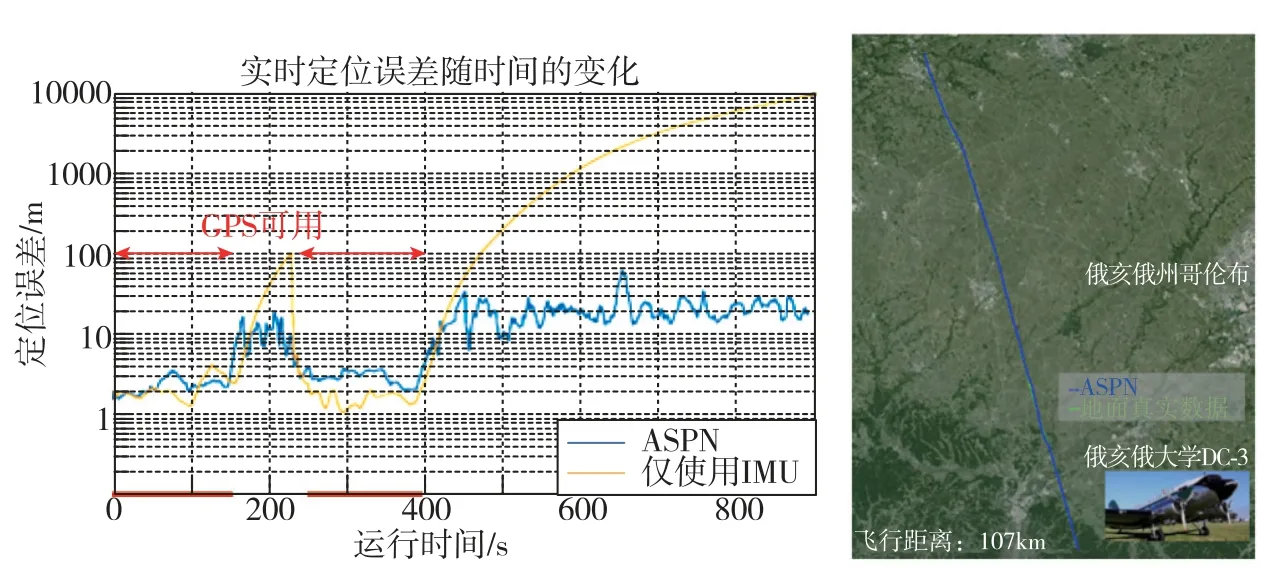
图10 ASPN计划试验结果Fig.10 Test results of ASPN program
4 技术展望
科技影响战争模式,国防促进科技发展。第三次科学革命促成第四次工业革命,同时萌发了第四次物理学革命,形成了以大数据、人工智能和量子、量子纠缠为标志的现代高科技,空间探测、空间竞争和空间安全、未来战争新常态和太空竞争经济新趋势已见端倪,多维大跨域、立体交叉、高端博弈、无人智能多信息融合、协同精确打击和快速多源多模式能量对抗新的战争模式已经形成。加上美国第三次抵消战略的影响,体系协同一体化适应未来战争体系信息化、跨越高速多源化适应未来战争立体多维化、自主小型平台化适应未来战争无人智能化装备颠覆创新,给国防现代装备的导航与控制、稳姿与稳向核心技术装备提出了更高新要求。为此,应充分发挥全源全系统全流程区块链、大数据集成运算推演解算剖析、数字孪生虚拟仿真,发现新导航控制规律,科学优化全系统指标分配体系,创新导航控制新的基础理论方法,提升全系统整体应用性能精度。
1)作为PNT体系的基础和主要信息源,GPS信号易受各种自然和人为干扰源的影响,军用GPS制导武器可能受到干扰甚至欺骗,关键基础设施对GPS的民用需求也不断增长,将会对利用GPS保持PNT优势产生限制,只有持续提升GPS能力才能有效保障PNT服务。未来,美国、俄罗斯、欧盟、日本等国家和地区将持续推进导航卫星的研发与部署,不断提升导航系统精度。此外,为确保GPS拒止环境下的导航功能,各个国家也在积极开发新型导航技术及相关替代导航技术。
2)惯性导航系统是人工智能信息敏感、操控、制导之源头,是国防装备精确打击的基础。传统机械转子式惯性导航系统经过以两小(减小摩擦力、减小体积)一高(提高精度)为终极目标、六代九种模式的不断进化,体积减小到原来的1/60,摩擦力减小到原来的1/150,精度提高4~5个数量级,但是其复杂程度和工艺实现难度也相应提高了几十倍。至此,光学、波动式、量子惯性产品已成趋势,主导着导航控制的今天和未来。因此,在应用挖掘好光学、波动惯性导航系统应用的基础上,着力新型量子及量子纠缠技术惯性导航系统和光动力悬浮力学叠加技术惯性产品研究,适应未来新一代高科技高要求导航。
3)在卫星导航拒止和极端复杂环境任务剖面下,无源惯性基导航系统依然是高精度导航的根基,必需在追求仪表精度基础上,正确认识惯性平台系统和惯性捷联系统的各自优势,同时积极发展新型惯性平台系统和以惯性导航为基础的多信息融合、多源复合导航系统。大量异类传感器信息整合,系统结构复杂,各种不同的导航方式都存在自身缺陷。因此,全源导航系统必须融合多种异类传感器信息,必须有复杂的异形结构和多模式算法软件的衔接支撑,必须有各导航系统重新配置和即插即用结构支撑,必须有多种复杂环境的适应性。
4)组合导航系统误差建模与评估、在线重构框架及算法、系统智能主动容错处理的多任务剖面要求能够处理复杂环境实时应用和不同故障模式下导航系统故障传播机理分析与判别,以提高容错结构对干扰的自适应性,保证导航系统良好的稳定性、连续性、抗干扰性和高精度的导航性能。
5)没有测量就没有科学,测量检测和试验验证是高精密导航设备性能保证的基础,是导航设备数字误差模型拟合迭代修正改进提升的桥梁,是完善验证误差模型的必需。要重视超高精度检测试验,同时要注重多项技术综合实验的理论方法,要注重误差激励机理、试验手段和规范标准体系的完善及研究。
5 结论
导航技术已成为人类全方位活动的重要支撑,是现代工业数字化、智能化的基础,更是现代国防装备精确打击的关键。世界航天已进入大规模进出空间和地月空间经济的新时代,精确可靠的导航技术是保证航天运输、重复使用航天运载系统和未来可学习可训练智能航天器安全入轨及精准返回的重要技术途径。应重视创新发展导航定位和控制技术,尤其是无源惯性导航系统、惯性基多信息融合和多源复合导航定位控制系统以及量子导航等新型导航系统。
猜你喜欢
导航定位学报(2022年4期)2022-08-16
舰船科学技术(2022年11期)2022-07-15
舰船科学技术(2022年10期)2022-06-17
军民两用技术与产品(2021年7期)2021-10-13
科学与财富(2021年33期)2021-05-10
小学生学习指导(低年级)(2019年10期)2019-10-16
学生天地(2019年6期)2019-03-07
快乐语文(2018年36期)2018-03-12
故事作文·高年级(2016年6期)2016-06-21
现代电子技术(2015年15期)2015-08-14