基于扩张状态观测器的运输机多故障容错控制
2020-06-16 03:27董文瀚童颖裔朱鹏郭佳
北京航空航天大学学报 2020年5期
董文瀚,童颖裔,朱鹏,3,郭佳
(1.空军工程大学 航空工程学院,西安710038; 2.空军工程大学 研究生院,西安710038;3.海军航空大学,葫芦岛125001; 4.国营芜湖机械厂 航电部,芜湖241000)
随着世界新军事变革的发展,战略空运能力已经成为衡量一个国家军事实力与航空工业发展水平的重要标志。2016年7月6日,代号鲲鹏的国产大型军用运输机运20在川西某机场冲上云霄,正式完成部队列装工作,这意味着中国空军战略投送能力迈出关键性一步,也标志着中国成功跻身世界少数能自主研制大型运输机的行列中!
对于大型运输机而言,高可靠性与安全性是飞行控制律设计的第一要求。然而,由于现代战争飞行任务与飞行环境的复杂性,飞控系统难免会在飞行过程中发生故障或遭受战斗损伤,此时有效的容错控制是实现安全飞行的关键和前提[1]。
20世纪80年代以来,国内外大量学者对飞行器的容错控制问题展开了广泛的研究。
2007年,Tao等[2]通过直接自适应方法设计了一种自适应故障补偿控制器,实现了双水獭飞行器执行器故障的容错控制。2008年,A lwi和Edwards[3]将滑模控制理论与在线控制分配相结合,实现了Boeing747飞机舵面损伤故障的容错控制。2011年,陈勇等[4]分析了多操纵面飞机的特点,在多目标混合优化算法的基础上,提出了一种自适应修正故障操纵面权值的控制分配方法,有效协调了舵面故障后的指令分配问题。2012年,黄宇海等[5]将自适应动态面反步法应用到了高超声速飞行器纵向模型,在舵面发生卡死故障时,通过在线调整控制器参数,实现了有效的容错控制。2017年,马骏等[6]针对飞机舵面故障引起的系统内部未建模动态,设计了L1自适应容错控制律,实现了飞行器匹配/不匹配不确定性同时存在下的舵面容错控制。2018年,张绍杰等[7]针对飞翼飞行器舵面故障问题,提出了预定动态性能约束条件下的反步容错控制方法,保证了舵面故障后系统对参考信号的渐近跟踪。
虽然上述文献都取得了较好的效果,却都只考虑了飞行器舵面故障而假定系统状态可完全被传感器测量。实际情况中,许多系统状态信息往往难以直接通过传感器测量,而且传感器可能发生故障或者测量精度较低导致获取的状态信息无法直接使用。在复杂的飞行环境中,传感器相比于舵面发生故障的可能性更大,甚至会带来更严重的危害。震惊世界的狮航与埃航空难中,一个共同的特征即Boeing737MAX飞机在爬升至万米高空后,低温使迎角传感器发生不可预知的故障从而错误激活飞行保护系统,最终酿成了难以挽救的俯冲事故,致使两次事故机上346人全部遇难。
因此,研究飞行器舵面与传感器多故障条件下的容错控制具有十分重要的意义。目前,考虑多故障并发的容错控制在各领域也取得了一些进展。Espinoza-Trejo和Campos-Delgado[8]通过设计扩展故障检测观测器,采用估计替代实际输出及模型跟踪重构控制律,实现了多故障并发时的电机驱动系统转速跟踪控制。文献[9]针对一类Markovian随机跳跃系统采用扩展滑模观测器实现了多故障重构,在此基础上基于滑模控制实现了系统的渐近稳定。杜艳丽和李元春[10]针对机械臂出现执行器及传感器故障的情形,提出了分散模糊滑模重构观测器及非奇异快速Terminal滑模技术,实现了主动分散容错控制。文献[11]以非仿射非线性系统为研究对象,考虑系统发生执行器及传感器同时故障的情形,设计了动态高增益K观测器估计故障后的系统状态值,在此基础上采用有限时间收敛的自适应反步法实现了系统跟踪误差的全局稳定。通过分析已有的研究成果可以看出,采用观测器方法估计发生故障后的系统状态,并以此为基础结合各种鲁棒自适应控制方法,是补偿多故障并发容错控制的重要手段之一。另外需要注意的是,上述文献中大多只研究了传感器与执行器同时出现损伤故障,且要求执行器控制增益已知。对于大型运输机来讲,传感器与舵面可能出现的故障类型很多,且由于可操纵舵面数量的增加与舵面构型的复杂性,控制效率矩阵一般无法精确已知,如何实现系统出现的更多故障类型和控制增益不完全可知情况下的运输机容错控制是一个十分必要和具有挑战性的研究课题。
本文针对大型运输机多类型故障情况下的姿态容错控制问题,提出了一种基于扩张状态观测器与反步法相结合的容错控制策略,主要有以下创新点:
1)以多舵面构型运输机为研究对象,综合考虑系统姿态角传感器与舵面可能发生的各类故障,建立了传感器与舵面多故障条件下的运输机姿态运动方程。其中,针对运输机多舵面布局特点,在传统运输机三舵面分类的基础上,通过引入分体式舵面概念和相应的舵面操纵关系矩阵,保证了运输机舵面故障前后控制律形式的统一性。
2)针对姿态角传感器故障导致的系统状态不可用问题,引入姿态角输出信号积分变量对原系统进行增广,在此基础上,设计扩张状态观测器对运输机姿态运动状态进行故障条件下的状态估计。其中,考虑到多故障运输机方程中含有的未知非线性传感器故障与多类型的舵面故障信息,分别利用径向基(RBF)神经网络和自适应参数估计方法对传统扩张状态观测器进行改进。针对扩张状态观测器中未知的非线性传感器故障采用神经网络技术进行逼近估计,对舵面损伤类故障采用自适应技术进行参数估计,对舵面卡死类故障、外界扰动组成的综合不确定项利用扩张状态量进行状态观测。
3)在完成状态估计后,将状态估计值与反步控制律结合设计运输机多故障容错控制器。在控制器设计过程中,在传统反步控制律中引入指令滤波器方法,解决了传统反步控制律微分爆炸与控制量不受约束的问题,设计了有效的故障容错控制器。同时考虑系统传感器与舵面故障,且无需单独设计故障诊断与辨识模块,所设计的多故障容错控制策略具有较好的工程应用价值。
通过对Boeing747大型运输机的仿真验证,可得本文提出的基于扩张状态观测器的反步容错控制策略能够保证系统对姿态角输入指令的有效跟踪,实现舵面与传感器多故障条件下的安全飞行。
1 问题描述
1.1 大型运输机模型
本文研究大型运输机巡航过程中传感器与主舵面发生故障后的姿态容错控制问题,因此设定飞机起飞后襟翼、扰流板、起落架等装置为收起状态,飞机姿态通过升降舵、方向舵与副翼控制。需要说明的是,相比于姿态角与姿态角速率,空速属于慢变量,为简化文章结构,假设运输机空速可在油门控制下保持常值。此时,运输机姿态控制系统可表示为[12]


传统的运输机数学模型只考虑到总的控制输入,即控制输入为等效舵面偏转量δ=[δa,δe,δr]T。然而随着现代运输机机体设计的大型化,为了增强飞机操纵性能并有效利用机翼面积,其舵面构型多采用多操纵面布局,即将一个传统的单体式舵面分割为若干小的分体式舵面。图1为Boeing747大型运输机舵面构型示意图。可以看到,其主舵面中的副翼和升降舵都被分为左右内外4块,方向舵被分为上下2块。
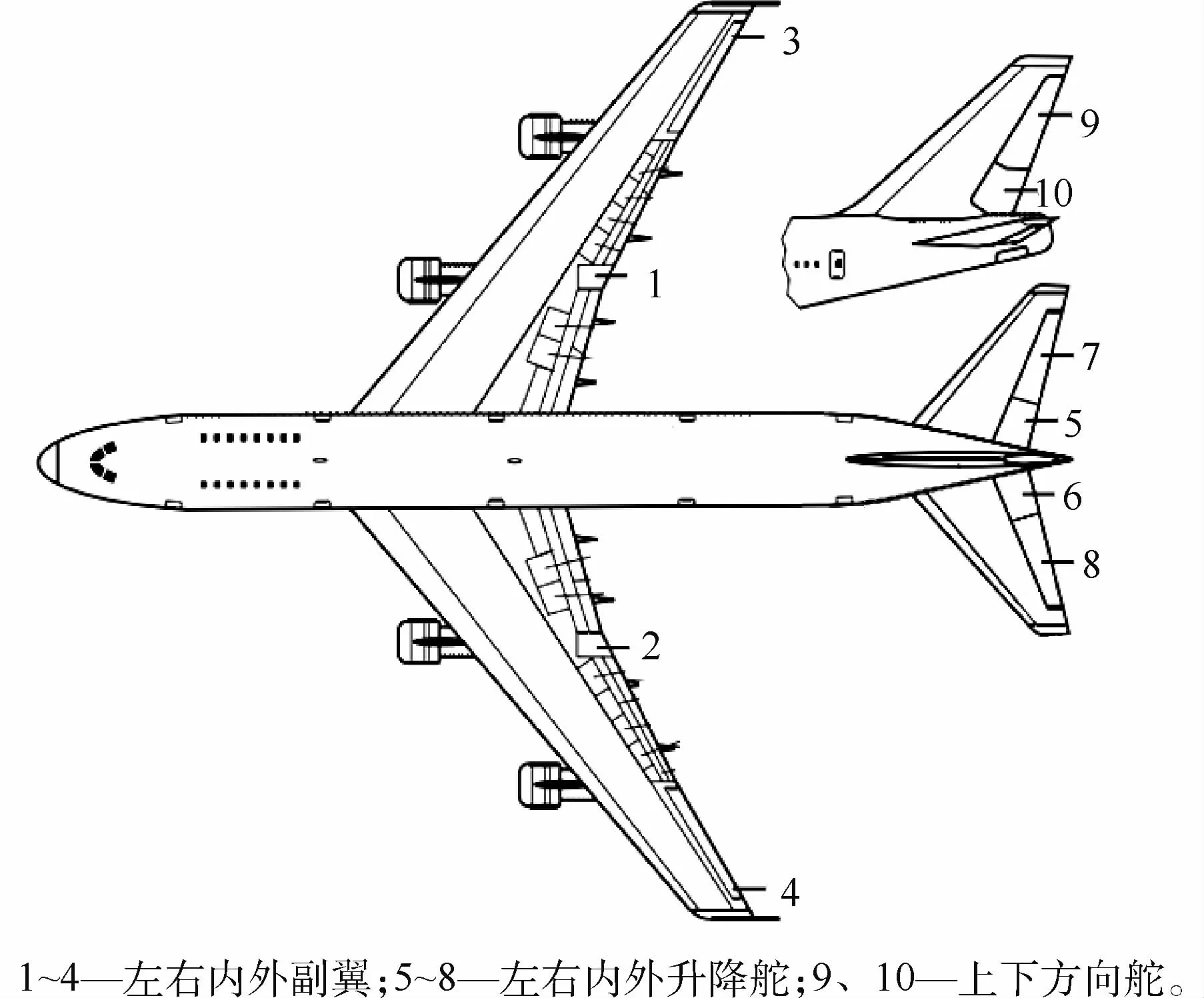
图1 Boeing747大型运输机舵面构型示意图Fig.1 Schematic of control surface configuration of large transport aircraft Boeing747
不失一般性,为了简化公式推导过程的矩阵维数,本文仅考虑运输机有5个分体式舵面来表征其多舵面 特性,即δc=[δal,δar,δel,δer,δr]T,下标a l、a r、e l、e r、r分别表示左副翼、右副翼、左升降舵、右升降舵、方向舵。可以看到,分体式舵面的引入一方面增加了飞机可控舵面的数量,提高了系统的可操纵性;另一方面,在发生舵面故障时,也可以通过剩余的健康舵面对故障舵面进行补偿,实现有效的容错控制。
一般来说,在考虑了可独立操纵的分体式舵面后,为了使冗余的舵面实现协调控制,同时避免不同通道控制作用的耦合,左右对称的分体式舵面通常采用联动操纵,即左右舵的偏转角度始终保持一致。基于此,引入了等效舵面与实际分体式舵面的操纵关系式(2)[12],保证了在打破传统飞机三舵面格局的同时,系统控制输入维数的不变性。

式中:δ=[δa,δe,δr]T为系统待设计的等效舵面控制输入;Kp为已知操控关系矩阵,表示为

其中:λae、λea为操控交联因子,表示不同舵面之间的耦合关系。根据文献[13]的讨论,在不考虑湍流等不确定性影响时,λae、λea可近似认为是已知的飞机结构参数。

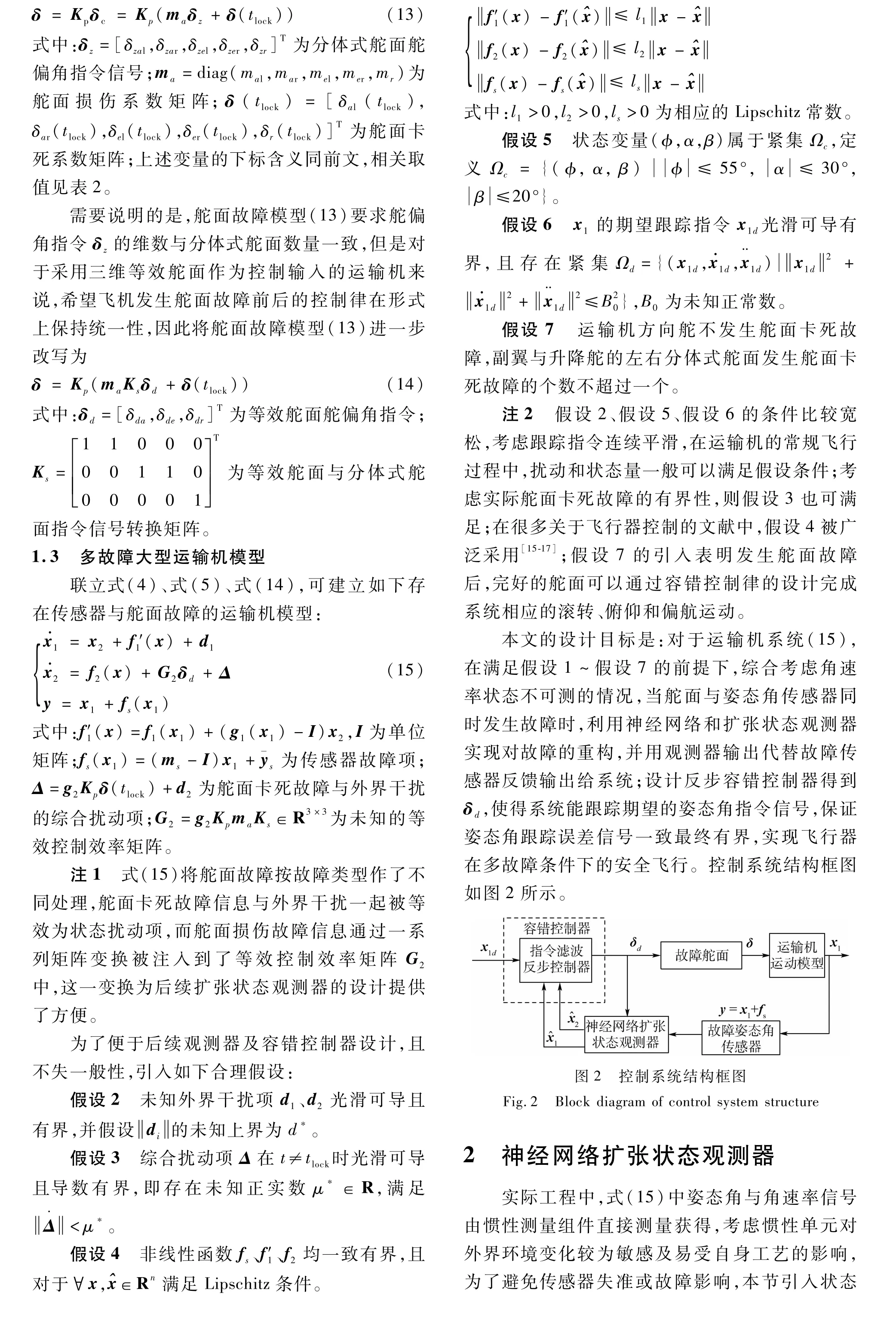





图4 姿态角指令跟踪曲线Fig.4 Command tracking curves of attitude angle
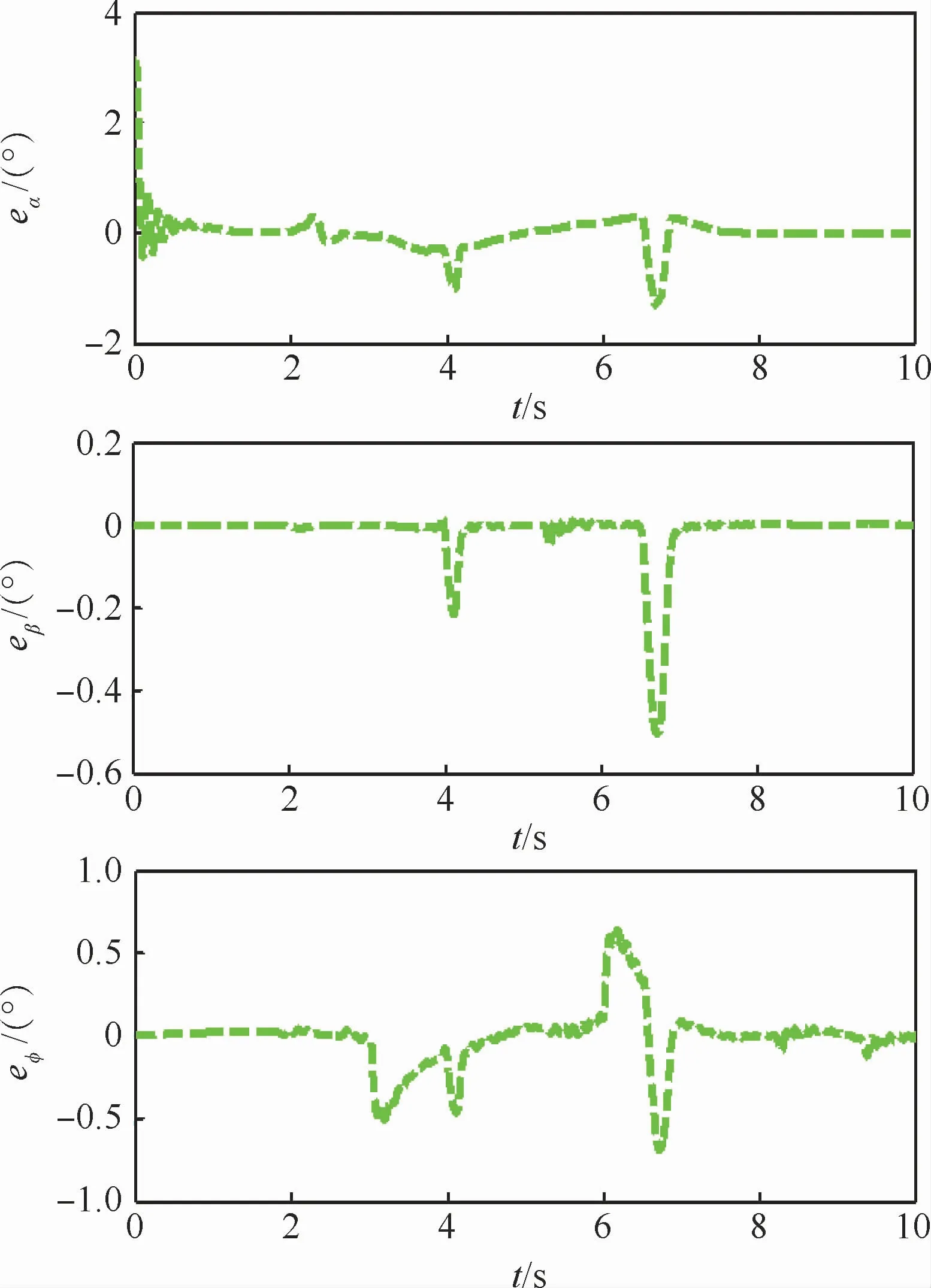
图5 姿态角跟踪误差Fig.5 Attitude angle tracking error
扩张状态观测器中神经网络的参数设置为:节点数l=25,高斯基函数的网络宽度bj=2,网络中心cj均匀设置在[5×5]×[5×5]×[5×5]×[5×5]区间内。根据第2节扩张状态观测器的稳定性分析,经过反复调试得到剩余扩张状态观测器参数和反步容错控制器参数,如表4所示,设置扩张状态观测器初值与被控系统相同。

图6 控制舵面偏转角度Fig.6 Deflection angles of control surfaces
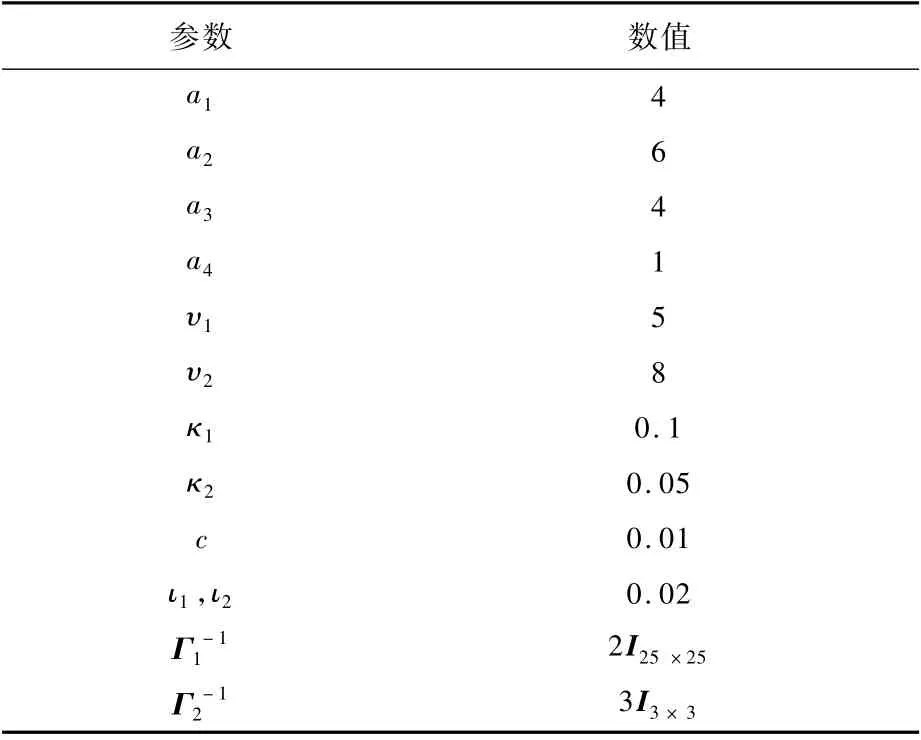
表4 扩张状态观测器与反步容错控制器参数Tab le 4 Param eters of extended state observer and backstepp ing fault toleran t controller
图4为系统姿态角指令跟踪曲线,红线表示姿态角期望指令信号,蓝线为系统神经网络扩张状态观测器对姿态角的观测值,黑虚线为系统姿态角真实状态值。可以看到,扩张状态观测器能有效地估计出系统真实状态值,观测误差较小,当t=2 s时,由于系统迎角传感器出现漂移偏差故障,导致迎角观测值与真实值出现一定程度的误差,但由于神经网络对传感器故障的快速估计,使观测器能迅速地跟踪上真实状态值。
图5为运输机姿态角对指令信号的跟踪误差。可以看到,由于在t=4 s和t=6.5 s飞机舵面发生损伤和卡死故障,导致姿态角跟踪误差增大,但由于容错控制器的存在,使误差能快速收敛,并最终趋近于零,实现了故障条件下姿态角对指令信号的有效跟踪。
图6为运输机舵面偏转角度。可以看到,整个过程舵面偏转值都能保持在约束范围内,没有出现舵面饱和的情况。另外,当左升降舵和右副翼在t=4 s和t=6.5 s分别出现舵面故障时,其余健康舵面偏转值能及时调整,实现对故障舵面的有效补偿。
为了进一步验证控制律的鲁棒性,在考虑传感器与舵面故障的基础上,分别加入外界干扰项d1=[dφ·,d˙α,dβ·],dφ·=dα·=dβ·=5sin(2πt)(°)/s和d2=[d˙p,d˙q,d˙r],d˙p=d˙q=d˙r=5sin(2πt)(°)/s2,结果如图7所示。

图7 d1、d2 分别作用下姿态角指令跟踪曲线Fig.7 Command tracking curves of attitude angle with d1 and d2
图7中,蓝线为在姿态外回路加入扰动的仿真结果,青线为在姿态内回路加入扰动的仿真结果。可以看到,当外界扰动出现在内回路时,由于扩张状态项可以有效估计干扰值d2,系统姿态角能平稳有效地跟踪上指令信号。而在外回路加入扰动后,由于神经网络扩张状态观测器(19)没有针对d1的估计项,这使得控制结果出现周期性抖动,系统鲁棒性有明显下降,但此时仍可以维持运输机安全飞行的基本目的。
通过上述仿真表明,在系统存在传感器与舵面多故障的情况下,本文所设计的神经网络扩张状态观测器能实时有效地估计运输机不可测状态值,通过指令滤波反步容错控制器的设计,完成了多故障条件下运输机姿态角对指令信号的有效跟踪,达到了控制器的设计目的。
6 结束语
本文针对大型运输机存在传感器和舵面可能发生的故障影响下的姿态角控制,构造了扩张状态观测器对系统不可测状态和故障信息进行实时估计,设计反步容错控制器与指令滤波器,跟踪期望指令。同时设计了基于扩张状态观测器的多故障容错控制器,解决了反步法计算过程的微分爆炸问题。通过Lyapunov稳定性分析,证明系统状态观测值与姿态角指令跟踪误差的一致最终有界性。仿真结果表明,本文所提出的控制策略能够实现传感器与舵面多故障情况下的运输机姿态角指令信号的有效跟踪与安全飞行,具有一定的工程参考价值。下一步的工作是对本文提出的策略进行半实物实验,更好说明所提控制策略的有效性。
猜你喜欢
火力与指挥控制(2022年6期)2022-07-25
计算机与数字工程(2022年4期)2022-05-10
北京航空航天大学学报(2022年2期)2022-03-08
计算机仿真(2021年3期)2021-11-17
学校教育研究(2020年11期)2020-06-08
航空科学技术(2019年2期)2019-09-10
现代兵器(2017年4期)2017-06-02
中华少年(2009年9期)2009-09-14
航空知识(2001年7期)2001-08-06