一种基于图论的机场空域无人机流量控制方法
2020-06-16 03:27:40崔恺曾国奇林伟全权
北京航空航天大学学报 2020年5期
崔恺,曾国奇,林伟,全权
(1.北京航空航天大学 电子信息工程学院,北京100083; 2.北京航空航天大学 无人系统研究院,北京100083;3.北京航空航天大学 杭州创新研究院,杭州310051; 4.北京航空航天大学 自动化科学与电气工程学院,北京100083)
近年来,国内外快递业务量剧增与人力成本的飙升,无人配送技术具有广阔的应用前景。无人机配送直线距离最短、运输效率高,对复杂服务场景有较好的适应能力,无人机投递包裹的能力已经在多次实验中得到了证实[1],因此用无人机解决“最后一公里”的问题,是未来的有效选择[2-3]。
美国是无人机物流的先驱阵地,无人机物流始于美国亚马逊公司,2013年亚马逊公司公布无人机计划Prime Air,UPS、谷歌等公司与美国邮政等对无人机物流进行了大量研究与测试;欧洲各国发展迅速,自2013年起不断进行相关布局与测试。亚马逊公司在英国完成了从仓库直接向用户家中传递产品的测试[4],DHL使用其Parcelcopter无人机交付紧急医疗用品[5],瑞士邮政的无人机为医院提供实验室样本等[6]。
中国无人机物流从追赶到领跑,2013年顺丰进行无人机测试并进入试运行,2017年起顺丰与京东相继获得空域批文[7-8],苏宁、中通等企业实现了物流无人机的试飞以至首次派送[9]。
无人机应用于城市物流前景广阔,能够有效处理城市物流“最后一公里”难题。城市内物流要求无人机具有更高的灵活性与安全性,多旋翼无人机与垂直起降无人机均可实现悬停与垂直起降,机动性能优异,转向灵活,对机场要求较低,适合中短距物流配送,是城市物流的极佳选择。
当前中国市面上的无人机机场,如一飞智控的“梧桐”自动化无人机机场、讯蚁的无人枢纽站RH1与顺丰无人机快递接驳机场等[10],均能实现单次单架无人机的起降。但上述无人机机场实际上只是无人机的自动接收设备,前一架无人机离开机场之后,后续无人机才能降落。在真实的物流场景中,“机场”将是物资库存区、中转站或配送站,需具有同时起降多架无人机的能力。在机场区域无人机密度较大时,需要设计应用于城市物流场景的机场与合理的流量控制方法,保证无人机在机场区域的飞行安全并提高通行效率。
文献[11]提出了一种单入口单出口、航路交叉、多停机坪的机场模型。机场中使用无约束的停机坪基本模型[12],即任意一架无人机可以进入任意一座停机坪,机场中各停机坪面积相等。针对该类机场模型提出了一种保证安全、效率优先的无人机机场流量控制方法,实现了无人机在机场的安全有序飞行。但该方法对无人机的控制精度要求较高,实际情况下可能因干扰因素影响存在安全隐患,同时文献[11]没有考虑需要紧急降落的无人机的调度问题。
本文是对笔者课题组研究成果[11]的改进和拓展。在文献[11]的基础上提出一种基于图论安全优先的机场空域流量控制方法,可实现同时段多架次垂直起降无人机的起降[13],并为需要紧急降落的无人机设计了降落通道和流量控制方法。通过测试机场运行容量与机场内飞行无人机之间最小距离评估了所提方法的有效性。
1 问题描述
对一个可同时停放多架垂直起降无人机的机场,若任意时刻只有一架无人机起飞或降落,只需使无人机从机场入口沿直线飞行至停机坪上方或从停机坪上方沿直线飞行至机场出口。但若有一架以上无人机在机场中飞行,则存在无人机相撞的风险。因而需要预先设置可用航道,令无人机在机场中沿规划出的航道飞行,并设计无人机模型,模拟无人机在机场航路的飞行。
1.1 机场航路图模型设计
本文涉及到的无人机起降方式为垂直起降,机场航路中确定存在节点包括出口、入口、停机坪节点与停机坪上方节点。仅靠上述节点的连接来组成机场内部航路无法保证无人机的飞行安全,因此需要设置一部分节点作为连接停机坪上方节点与出入口的中间节点。
机场区域整体呈矩形,每块停机坪区域为正方形,无人机停放于停机坪中心。设机场有6个停机坪,机场航路图设计如图1所示[11]。机场只有1个入口、1个出口,机场内有多个停机坪,且航路交叉。图1中实心点表示机场节点;空心点表示停机坪与停机坪上方节点;实线表示机场中的航路;虚线表示停机坪区域的航路。

图1 机场航路示意图[11]Fig.1 Schematic diagram of airfield route[11]
上述机场航路图可视为由线连接的点集,可采用图论模型[14]来表示。用无向图Γ=(N,E)表示机场航路图模型,N表示机场所有节点,E⊆N2表示N中各节点之间是否有路径直接相连,即表示机场所有航段。
机场节点数量为nN,机场航段数量为nE,则图Γ节点可枚举表示为,其中1<nN∈Z+;图Γ航段可表示为,其中1<nE∈Z+。任意航段均可以其两侧节点表示为E(j)={Ns(j),Ne(j)}∈E,其中Ns(j),Ne(j)∈N。
令机场航路图图论模型为Γ,则得到Γ中航路图步骤如下:
步骤1 获取所有机场节点坐标,设共有nN个节点(1<nN∈Z+),编号为i的节点为N(i),坐标为pwp,i。
步骤2 获取Γ的邻接矩阵A,A为nN阶对称方阵,E(G)是图Γ中航路的集合,A的值可表示为

步骤3 将距离作为航路图的权值。根据节点坐标位置与节点之间连通关系,计算得到带距离权值的邻接矩阵GA,GA为nN阶对称方阵,其值如下所示:

该矩阵包含了各节点之间的相对位置及连通关系,通过对GA进行处理可实现对机场空域进行流量控制。
1.2 无人机模型
若能保证无人机飞行安全,则无人机的飞行与其大小、形状无关,即可将无人机视为一个质点。假定机场空域有M 架无人机,满足如下模型:

式中:li∈R+;pU,i∈R3与vi∈R3分别表示第i架无人机的位置与速度;vd,i为第i架无人机的期望速度,i=1,2,…,M。
2 流量控制方法设计
要实现无人机在机场内有序飞行,需要对进场与离场的无人机进行流量控制,规定无人机何时可以进入机场空域。无人机在进场或离场飞行前,应规划出航路后沿航路飞行。为保证无人机飞行安全,在为无人机规划航路应需避开可能发生冲突的航段。规避这部分航段之后,可能无法规划出有效航路,起降延误,无人机需要在入口或停机坪处等待。
本文的流量控制方法主要包括航路规划方法、延时策略与航路图更新3个部分,以得到无人机的进离场时间与路径。从无人机准备进场或离场到飞行结束,流量控制方法整体流程如图2所示。
即在规划出有效航路后对航路图进行更新,航路无效时延时等待;在无人机飞行过程中,在满足一些条件时继续对航路图进行更新。本文设计的流量控制方法还要为需要紧急降落的无人机提供降落的方案。
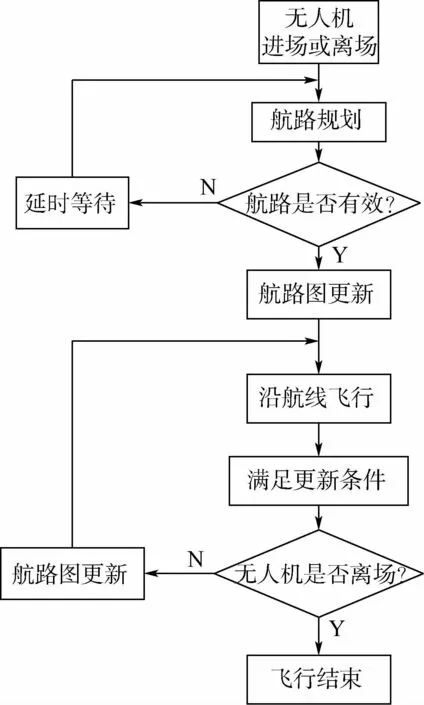
图2 流量控制流程图Fig.2 Flowchart of flow control
2.1 航路规划方法设计
本文中采用基于Dijkstra算法[15]的方法规划路径。Dijkstra算法是一种使用广度优先搜索解决赋权有向图的单源最短路径问题的优化方法,可以满足需求。机场航路不存在负权边,满足Dijkstra算法使用条件。
机场中航路由无向图Γ中的边组成,设无人机Uk的航路中第i航段表示为Ek(i),则航路可表示为RE,k=[Ek(1),Ek(2),…,Ek(nx)],nx为航路中边的数量。但使用航路中的节点序列比使用边表示航路更加方便。对于航路中前后相接的航段,前方航段起点即为后方航段终点。沿无人机飞行方向,航段Ek(j)前方为Ek(j+1),设Ek(j)的起点为Ns(Ek(j)),终点为Ne(Ek(j)),则Ne(Ek(j))=Ns(Ek(j+1)),其中1≤j≤nE∈Z+。设使用节点编号表示的Uk航路为RN,k,RN,k=N(RE,k)=[Ns(Ek(1)),Ne(Ek(1)),Ne(Ek(2)),…,Ne(Ek(nx))]。
在设计机场时采用无约束的停机坪模型,进场规划时,以入口节点为起点,以各个停机坪节点为终点。用Dijkstra算法逐个计算出在无向图Γ中从入口到每一座停机坪的最短路径,所有路径中最短的一条为进场路径RN,k;若有多条路径长度相等且最短,选择航路序列中同等位置但节点编号最小的一条。如图3所示的加粗实线,在机场中没有其他无人机时,无人机U1进场路径RN,1=[N(4),N(1),N(5),N(21)];U2进场路径RN,2=[N(4),N(7),N(10),N(23)]。
离场航路规划以当前所处停机坪节点为起点,以机场出口为终点,直接利用Dijkstra算法得出离场路径。
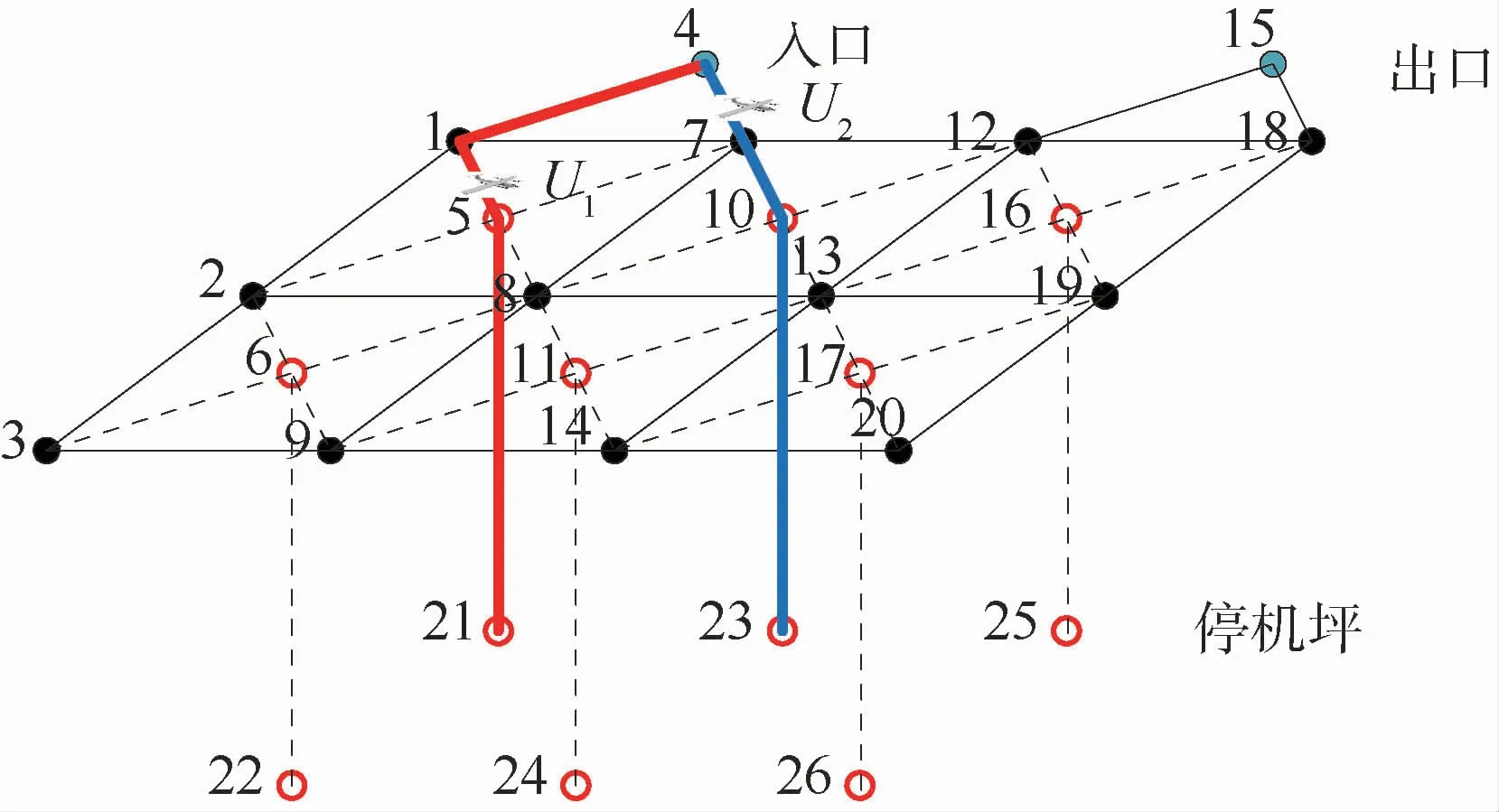
图3 机场进场航路规划示意图Fig.3 Schematic diagram of airfield arrival route planning
2.2 飞行延时策略设计
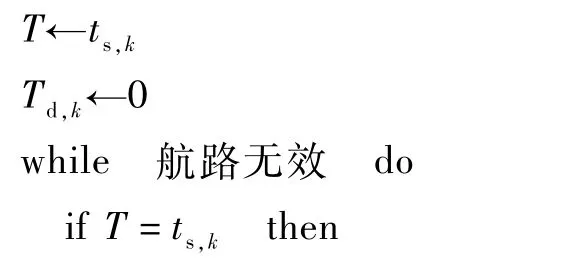
设Uk接收到进场或离场指令的时间为ts,k,并在该时间点为无人机规划路径。若无可用路径,起降延时,并在一段时间后再次规划航路,直到航路可用。设T为当前时刻,Uk在当前时刻总延时为Td,k,每次增加的延时时间为tstep,k,从开始等待到飞行流程如下所示。

设计延时策略目的如下:
1)禁止进场时后方无人机超越前方等待的无人机。
2)使延时等待最久的无人机尽早进场或离场。
上述目的通过改变无人机每次延时tstep,k来实现。设置一个较小的tstep1,一个较大的tstep2,令tstep2≥2 tstep1。当存在多架无人机进场延时或离场延时,延时最久的无人机tstep,k=tstep1,其余无人机tstep,k=tstep2。设在当前时刻进场延时或离场延时的无人机数量为nU,d,机场中全部的无人机数量为nU,ttl。无人机处于进场延时还是离场延时可通过判断Uk实时位置pU,k得出。判断进场或离场时Uk实时tstep,k策略如图4所示。
无人机规划出航线后延时时间Td,k清零,因此Td,k>0即表示Uk处于延时状态。在确定Uk为进场或离场之后通过图4所示策略确定所有处于延时状态Uk的tstep,k。注意进场与离场无人机之间的延时计算互不影响,将两类无人机的延时时间分开比较。

图4 t step,k实时计算策略Fig.4 Real-time computing strategy of t step,k
2.3 机场航路图更新方法设计
机场航路图更新根据无人机的飞行状态、实时位置等信息,将机场中部分航段中断或恢复。如机场中已有无人机U1飞行,后续进场的U2规划航路时受U1影响不能经过一部分航路,则对于U2该部分航路被中断。被中断的航路在满足某些条件下(如U1降落或离场)应被恢复,使该部分航路能够重复使用。本节为全文重点研究内容。与文献[11]中的方法不同,本文设计的航路图更新方法确保无人机在机场空域的飞行安全。
若GA(i,j)=0,说明航点N(i)与N(j)之间不存在航路。航路图更新仅指对原有的航路变化,不允许产生新的航路。设去掉中断的航路后,剩余机场航路矩阵为GA,r,GA,r也是对称 矩阵。中断航路时GA,r对应位置归零,恢复航路时GA,r对应位置恢复原值。则无人机经过机场,不断更新航路图的过程实质上是将GA,r中的值不断归零与恢复原值。
为保证无人机的飞行安全,规定任意时刻同航段上最多只有1架无人机,不考虑无人机间纵向安全距离。因此在为无人机规划完成航路之后,规划出的航路应被中断。但若2架无人机航线存在公共节点,且可能在相近的时间到达该公共点,仍旧存在安全隐患。
文献[11]中为了防止在公共节点处发生冲突,先规划出一条航线,预估无人机按当前速度沿航线飞行时在公共节点是否发生冲突。若并无冲突,则这条航线就是在空域内的航路;否则重新规划航路。一旦无人机没有按照当前速度飞行或受其他因素干扰,便可能发生意料之外的冲突。
为进一步提高飞行安全性能,在规划有效航路后,本文将GA,r中所有已规划出航路中节点为端点的航段全部中断,可以保证所有无人机的航路不存在公共点,使2架无人机的航路不存在交集。可以在无人机Uk飞过整条航路后恢复因Uk被中断的所有航路。但上述策略飞行效率较低,因此规定Uk每经过一个节点,在GA,r中恢复以该节点为端点的航段,前方航段除外。在规划完成航路后中断航路,无人机在机场内飞行过程中恢复航路。
若有多架无人机在机场内飞行,可能有部分航段被重复中断,若不进行处理,任意一架无人机经过该航段端点节点后,会将该航段恢复。该航段此时可能不应恢复,仍旧存在安全隐患。用标志位矩阵GF记录航段被中断的次数,GF将与邻接矩阵A共同判断各个航段是否可以中断或恢复,令初始值GF=A。GF(i,j)=1表示节点i,j之间航路为通,否则说明该航路不存在或已中断。
整个机场运行过程中,在GF满足一定条件下,对GA,r进行更新。无人机规划出有效航路之后,若GF(i,j)=1,则中断航路,且使GF(i,j)=0;若GF(i,j)≤0且原本存在航路(即A(i,j)=1),说 明 该 航 路 已 被 中 断,只 需 使 GF(i,j)=GF(i,j)-1。无人机飞过一个航点时,若以该节点为端点的航段对应的GF(i,j)=0,则恢复航路,且使GF(i,j)=1;若GF(i,j)<0且原本存在航路,只需使GF(i,j)=GF(i,j)+1。注意GF为对称矩阵,在更新GF(i,j)时需要同步更新GF(j,i)。
为防止无人机通过停放有无人机的停机坪上方航点,停机坪区域航路需进行特殊处理。
无人机进场航路图更新步骤如下:
步骤1 设Uk的进场航路为RN,k=[N(i1),N(i2),…,N(ir)],在GF对应值满足条件时,

GA,r对称,将GA,r(in,im)一同修改,并对GF同时进行更新。规划出有效航路后,将所有以RN,k中节点为端点的航段中断,并进行标记。

2),GA,r表达式如下:

同理,将GA,r(in,ia)一并修改并对GF进行更新,恢复的航路不包括N(ia)到下一航点的航段。若无人机U1与U2位置如图3所示,剩余航路图如图5所示。
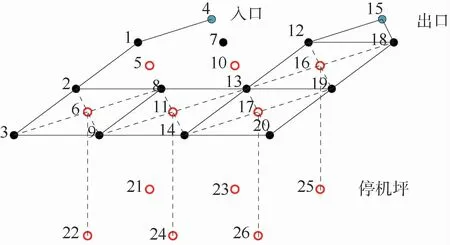
图5 机场剩余航路示意图Fig.5 Schematic diagram of airfield remaining route
步骤3 为避免后续无人机进入已被占据的停机坪,规定无人机到达航路中的停机坪节点N(ir-1)与N(ir)时不恢复停机坪区域航路,也不改变停机坪区域航段的标志位。
停机坪与停机坪上方航点在进场航路中为最后两位,在无人机进场直到起飞离开停机坪的过程中均需保持航路中断的状态,直到无人机起飞后才会恢复。进场航路图更新流程如图6所示。
离场航路图更新与进场时类似。但在规划航路前,需先将无人机所在停机坪区域航路全部恢复,否则无法规划出可用航路。若规划出航路无效,则需再次中断该停机坪区域所有航段,到下个离场时间点再次恢复。更新过程中需符合GF矩阵的限制,并对GF进行更新。航路图更新步骤与进场时步骤1、2相同,但在步骤2时可以一直飞离出口节点。离场时航路图更新流程如图7所示。
与入口相连的航段有两条,虽然两条航段在航路规划时被中断,但无人机进场后在规划航路之外的航段会立即恢复,因此无人机可以连续进场;但与出口相连的航段直到无人机离场才能恢复,因此同时段只能实现1架无人机起飞离场。
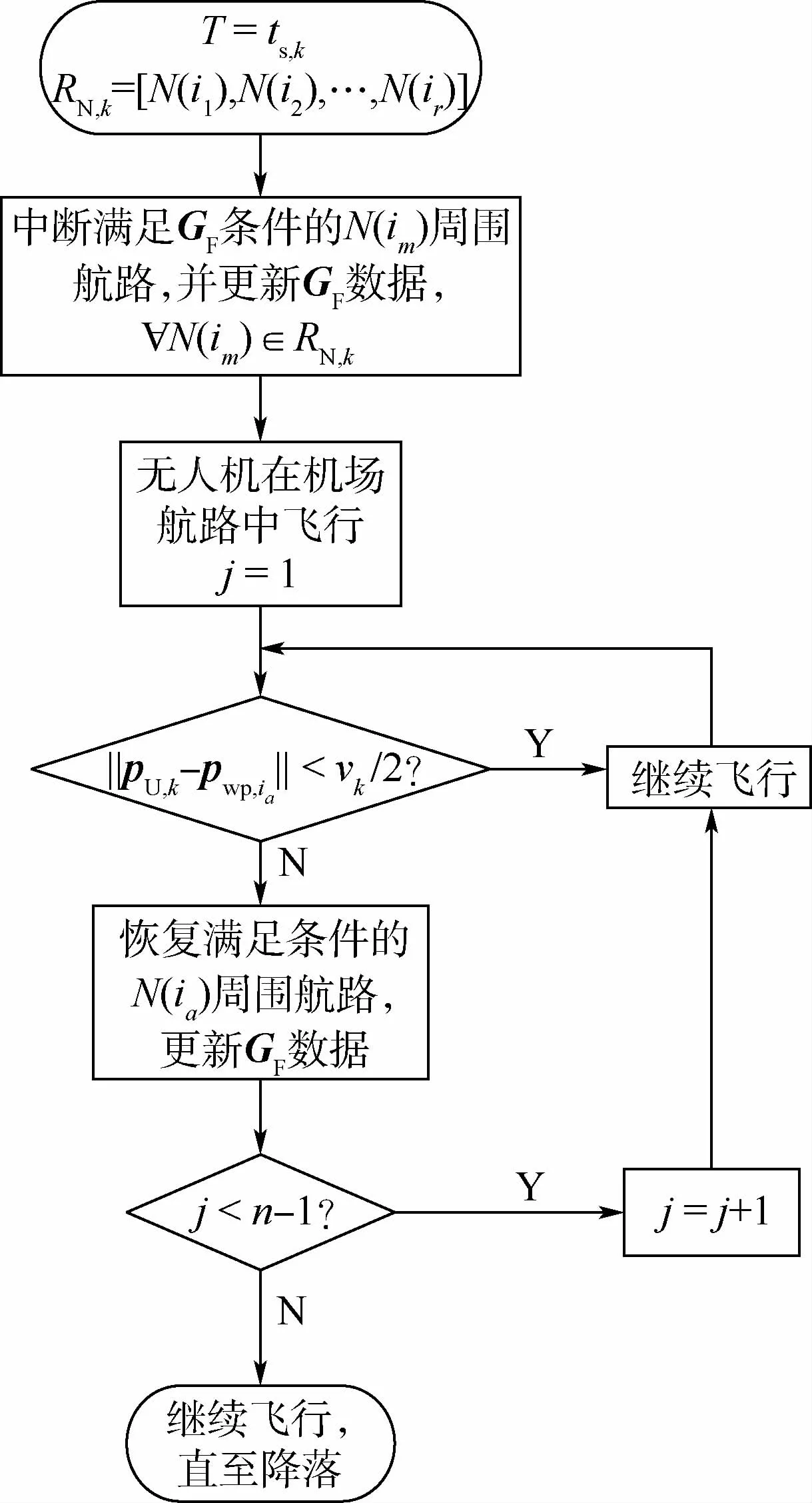
图6 进场航路图更新流程图Fig.6 Flowchart of airfield arrival route map update
2.4 无人机紧急降落方法设计
在正常飞行以外,若无人机运输的是需要紧急处理的物品或者无人机自身状态不佳,无人机需要紧急降落,机场应设计降落通道。对于此类无人机,需要遵循如下原则:
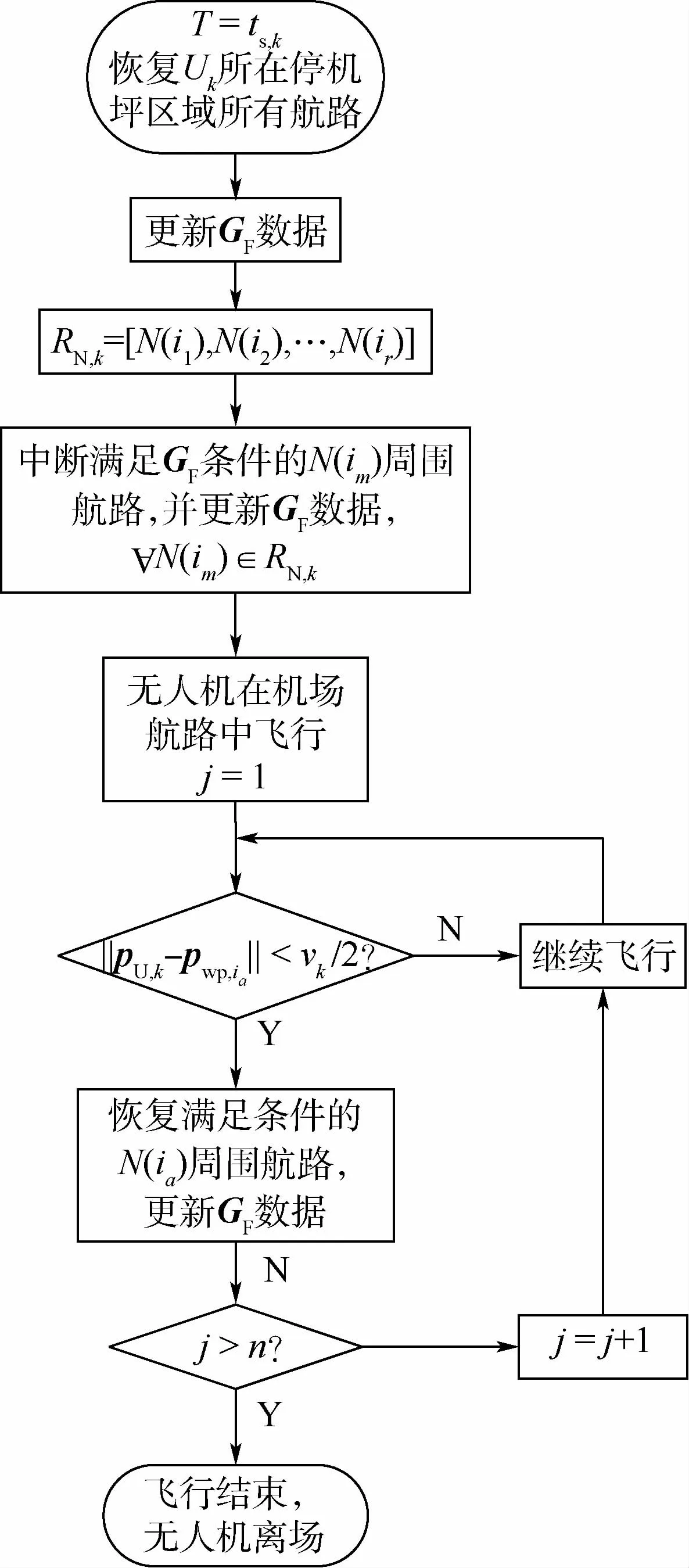
图7 离场航路图更新流程图Fig.7 Flowchart of airfield departure route map update
1)确保无人机飞行安全。
2)使无人机尽快降落。
因此,无人机紧急降落航路应沿最短路径飞行至停机坪区域。无人机在机场以外的空域飞行时高度高于机场航路,因此设计紧急航路高度高于正常飞行航路,且航线从入口直接飞行至停机坪上方。
在入口及各停机坪上方航点上方增加一个航点作为紧急降落航路,如图8所示。
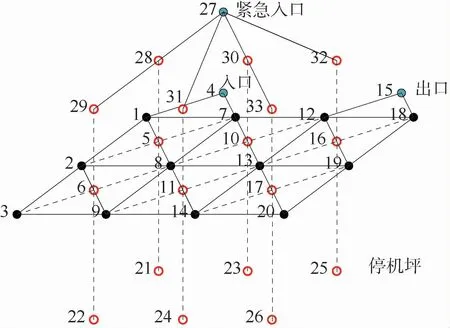
图8 紧急降落机场航路示意图Fig.8 Schematic diagram of airfield route for emergency landing
当无人机需要紧急降落时,从紧急入口进入。航路规划方法与进场时的航路规划方法相同。由于部分紧急降落的航路夹角较小,若有无人机连续紧急降落,紧急入口附近存在安全隐患。因此规定前一架无人机从紧急入口进入时,将以紧急入口为端点的航段全部中断,在该无人机飞过安全距离后恢复该部分航路。
3 性能测试
3.1 评估指标
对于有人机,扇区容量评估在空域安全与空域设计等方面非常重要[16],是影响空中交通系统安全和效率的核心因素[17]。本文方法虽针对可垂直起降的无人机设计,与有人机差别很大,但空域容量仍是机场性能的重要指标。
实验中通过测试机场的运行容量[18]来评估机场性能,运行容量是指在可接受的延误水平下,空域系统单位时间所能服务的最大航空器架次。仿真时使用无人机进场间隔,即每隔多长时间进场1架无人机来表示机场容量。在确保无人机飞行安全时,通过调整无人机的进场间隔时间,得到可接受平均延误时长(以下简称平均延时)时的间隔,该间隔对应机场运行容量。测量进场与进离场间隔时间与平均延时的曲线,并找出对应机场运行容量的进场间隔时间。
无人机之间的距离可以最直观地表示空域系统的安全性能,机场运行时场内无人机的最小距离是机场安全性能的重要指标。在本文设计的流量控制方法中,一段航路同时段最多只有1架无人机经过,不需要设计纵向安全距离,令安全距离为无人机直径的2倍即可。
实验通过测试任意时刻场内飞行的无人机之间距离的最小值来评估流量控制方法的安全性能,若任意时刻的无人机重心最小距离均大于安全距离,则该方法可以确保无人机飞行安全。
测试机场性能时只针对正常飞行的无人机进行实验。因为机场性能的测试是在无人机流量很高的极端情况下进行的测量,而无人机紧急降落是在机场实际运行时的功能。在机场内有空闲停机坪时,需要紧急降落的无人机降落延时可以忽略不计,只需要测试此种情况下无人机之间的安全性能。
3.2 仿真实验
实验分别对拥有3座、6座与12座停机坪的机场进行测试。每座停机坪为边长10m的正方形区域,停机坪节点位于区域中心。3种机场的停机坪排布分别为一行三列、二行三列、三行四列。航路高10 m,入口与出口节点与左上方、右上方的2座停机坪正对(6座停机坪机场示意图见图1)。无人机在机场内匀速飞行,速度为0.4m/s,进场间隔均匀。无人机处于等待状态时每次延时时间为10 s;若有多架无人机处于延时状态,后进入等待状态的无人机每次延时时间为20 s。入口处在前一架无人机飞出10 s后,方允许后续无人机进场。停机坪上方航点到四周航段距离为5m,该距离需要能够确保无人机之间的飞行安全,因此设无人机直径为1.5m,无人机之间安全距离为3m。仿真开始时,机场中没有无人机。
测试紧急降落的安全性能时,用少数紧急降落无人机与多数正常飞行无人机按照一定进场间隔在图8所示的机场中进行测试。
3.2.1 进场容量测试
无人机只进场不离场,不考虑停机坪承载量的情况下,每座停机坪在无人机降落后恢复停机坪区域航线,等待后续无人机降落。
分别在3座、6座、12座停机坪的3种机场通过20架、50架、100架无人机,调整无人机进场间隔并计算每架无人机平均延时。设进场时允许的平均延时为25 s。进场间隔时间-平均延时关系如图9所示。
图9中横虚线为允许的延误水平(25 s),与3条曲线交点的横坐标即为对应运行容量的进场间隔时间。3种机场无人机进场间隔时间分别在大于23 s、16 s与14 s时可以满足允许的延误。
3.2.2 进离场容量测试
分别在3种机场通过15架、30架、60架无人机,调整进场间隔时间并分别计算进场平均延时、离场平均延时与平均总延时,无人机在降落40 s后准备起飞。设允许的平均总延时为50 s。3种机场进离场间隔时间-平均延时关系如图10所示。
3种机场进场间隔时间-平均总延时如图11所示。

图10 间隔时间-平均延时(进离场)Fig.10 Interval versus average delay of arrival and departure

图11 间隔时间-平均总延时(进离场)Fig.11 Interval versus average total delay of arrival and departure
3种机场无人机进场间隔时间分别在大于70、75与105 s时可以满足允许的延误。对于有12座停机坪的机场,在平均延时可接受的情况下,对机场中停机坪的利用率非常低。
3.2.3 进场安全性能测试
分别使用达到3种机场运行容量时的进场间隔时间与10 s的间隔时间,使用与测试运行容量时相同数量的无人机流,测试进场时无人机之间的最短相距距离,结果如图12所示。
图12纵坐标为仿真各个时刻所有机场内飞行中的无人机最短相距距离。图12(a)和图12(b)分别为进场间隔时间达到进场容量时和间隔时间为10 s时各个机场内所有飞行中的无人机不同时刻的最短相距距离。2组数据中任意时刻最短相距距离均大于4m,大于安全距离。
3.2.4 进离场安全性能测试
分别使用达到3种机场运行容量时的进场间隔时间与20 s的间隔时间,使用与测试运行容量时相同数量的无人机流,测试进离场时无人机之间的最短相距距离,结果如图13所示。
图13(a)为间隔时间达到进场运行容量时各个机场内所有飞行中的无人机不同时刻的最短相距距离,图13(b)为间隔时间为20 s时不同时刻的最短相距距离。2组数据中任意时刻最短相距距离均大于4m,大于安全距离。

图12 运行时间-无人机最短相距距离(进场)Fig.12 Arrival running time versus the shortest distance between drones

图13 运行时间-无人机最短相距距离(进离场)Fig.13 Arrival and departure running time versus the shortest distance between drones
3.2.5 紧急降落安全性测试
保持正常飞行的无人机进场间隔时间为100 s,一共通过10架正常飞行的无人机,紧急降落的无人机数量从1架增加到5架,分别在第1、3、5、7、9架正常飞行的无人机之后从紧急入口进场,计算仿真过程中的最小距离。测试结果如表1所示。

表1 紧急降落最小距离Tab le 1 M inim um d istance during em ergency landing
表1表明紧急降落时的最小距离均远大于安全距离。
3.3 结果说明
图9结果表明,在保证无人机飞行安全时,机场内停机坪数量越多,其进场运行容量越大。
图10结果表明,无人机进离场时增大进场间隔时间,进场平均延时会快速降低,但对离场平均延时影响不大。这是由于在设计的流量控制策略下,同时刻只允许1架无人机起飞,此时其他准备离场的无人机被迫延时等待。在进场平均延时趋向于0 s时,离场平均延时快速降低,这是由于此时无人机进场频率很低,机场内同时存在的无人机数量较少,对需要离场的无人机限制大幅减小,使离场平均延时快速降低。
图11结果表明,在确保飞行安全时,机场内停机坪数量越多,其进离场运行容量越小。其结果与进场相反,分析后发现,任意1架无人机规划出离场航路后,会阻塞住出口节点直到离开机场,同时刻只允许1架无人机离场,影响了离场效率,且机场越大,在机场中等待的无人机数量越多,无人机在机场内飞行时间越长,使平均延时越高。
图12与图13结果表明,所有机场中,无论是进场或者进离场,无人机之间的最短相距距离均超过安全距离,说明本文所设计的流量控制方法能够保证无人机的飞行安全。
表1表明本文设计的紧急降落方法是安全可行的,在机场正常使用时,能够为需要紧急降落的无人机提供通道。
4 结 论
1)本文针对城市物流场景设计了一种单入口单出口、航路交叉、多停机坪的无人机机场模型,并就此模型提出一种基于图论的中小型垂直起降无人机的流量控制方法,实现了同时段多架次无人机在机场中安全起降,并为需要紧急降落的无人机提供降落通道。
2)所提方法能够实现对垂直起降固定翼无人机与多旋翼无人机在设计机场区域的流量控制,保证无人机在机场空域的飞行安全,算法鲁棒性较高。
3)设计机场时应设计较大的停机坪,不宜使机场内停机坪数量过多。较小的停机坪会降低机场的安全性能,过多的停机坪会影响无人机进离场效率,降低机场容量。
4)安全优先的流量控制方法能够确保无人机的飞行安全,但由于同时刻只允许1架无人机起飞,影响了无人机飞行效率,降低机场运行容量。因此,在后续工作中,应实现同时段多架无人机的离场飞行,进一步提高机场运行容量。
5)所提方法与文献[11]设计的效率优先的流量控制方法均能实现无人机在机场的安全飞行。2种方法在无人机离场时都会在出口发生阻塞,因而运行容量相接近。安全优先的方法最小距离要大于效率优先的方法,且对无人机控制精度要求较低,安全性能优于效率优先的方法。
6)所提方法在规划航路时就保证了机场内无人机的飞行安全。若无人机机场规划时,采用本文设计的机场模型,均可使用本文提出的流量控制方法。无论机场大小与出入口数量,都可以保证机场内无人机的飞行安全。若存在多个出口,需要判断无人机从哪个出口离场;若出入口数量较多,在从机场出入口到外部航路的飞行过程中需要进行更加缜密的防冲突判断,后续研究将考虑存在多个出入口的情况中机场和空中的流量调度。
猜你喜欢
作文小学中年级(2024年1期)2024-03-20 23:01:18
扬子江(2022年6期)2022-11-17 11:32:11
扬子江诗刊(2022年6期)2022-11-09 14:07:33
北京航空航天大学学报(2022年5期)2022-06-06 09:26:52
航空工程进展(2019年5期)2019-11-05 02:32:08
新闻传播(2018年12期)2018-09-19 06:26:40
传奇故事(破茧成蝶)(2018年3期)2018-05-25 10:19:17
团结(2017年2期)2017-11-25 05:43:55
西南交通大学学报(2016年4期)2016-06-15 20:29:37
大社会(2016年5期)2016-05-04 03:41:45