一种车载捷联惯导行进间QUEST优化粗对准算法
2020-06-13 05:42韩勇强王新健陈家斌
中国惯性技术学报 2020年1期
韩勇强,王新健,谢 玲,陈家斌
(北京理工大学,北京 100081)
初始对准一直是惯性导航系统极为重要的问题,传统的静基座对准多使用解析式粗对准方法[1],精度满足使用要求,但对准过程中载体处于静止状态,缺乏机动性。针对这一问题,文献[2-4]基于姿态矩阵分解的思想,将载体姿态分为三个独立的部分,提出了计算初始姿态的关系式,但是未对如何计算姿态角进行有效说明。文献[5,6]在粗对准计算过程中使用双矢量叉乘计算方法,没有充分利用两个积分时间段信息之间的关系,对信噪比较低的地球旋转角速度依赖较高,对重力矢量信息的利用不足。文献[7,8]分别使用卡尔曼滤波与航位推算方法,但简化了粗对准过程,导致航向角收敛速度慢,精度受到限制。目前运动基座粗对准多使用QUEST算法,该算法能够克服上述缺点,具有适中的计算复杂程度。文献[9,10]使用QUEST算法,实现了晃动基座下的粗对准,但其采用批处理方法,并未利用里程计对载体姿态进行实时反馈,不利于嵌入式实现。同时,由于惯导及里程计均存在一定误差,上述文献均未对误差进行预处理,精度较差。
里程计自主性好,信号不易受干扰,标定后与车体坐标系重合,可以更直接地得到车体坐标系下的速度,结合地理坐标系下的重力矢量,可以方便地得到车体与地理坐标系的转换关系。基于以上问题,本文提出了一种基于里程计辅助的QUEST优化算法,并经过实验验证,实现了车载捷联惯导行进间粗对准,减小了系统粗对准误差。
1 坐标系定义
(1)e系为地心坐标系,原点位于地心,z轴沿地球自转方向,x轴位于赤道平面内,从地心指向车体初始位置子午线,x轴、z轴与y轴构成右手坐标系。e系与地球固联。
(2)i系为惯性系,与初始时刻e系指向相同,且不与地球固联。
(3)b系为车体坐标系,x、y、z轴等分别指向车体右、前、上方,且与车体固联。
(4)n系为车体所在位置的当地地理坐标系,x轴指向正东,y轴指向正北,z轴指向天。
2 粗对准算法研究
初始对准其实就是利用里程计和惯导的输出,求解在初始状态下b系与n系的转换关系,即确定姿态矩阵Cbn。然后再将计算得到的姿态、速度、位置,反馈回算法当中,从而实现车载惯导行进间的粗对准。算法原理图如图1所示。
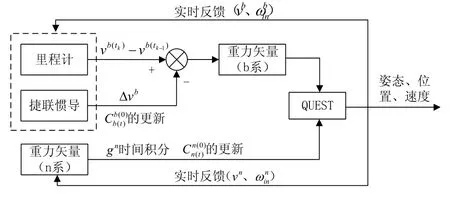
图1 粗对准算法原理图Fig.1 Diagram of the coarse alignment algorithm
2.1 重力矢量信息的计算
基于时间更新过程,我们可以对姿态矩阵进行分解:

这样姿态矩阵便被分成三部分,导航系的更新,车体坐标系的更新以及初始姿态矩阵。这为我们后续的计算带来方便。
其次,写出n系下捷联惯导的速度比力方程:

其中,Vn为车体在导航坐标系下的速度,Cbn为t时刻的姿态矩阵,fb为捷联惯导测量到的比力,为n系下的地球自转角速度,为n系下n系相对于e系的角速度,gn为n系下当地的重力矢量。
式(2)经过变换后可以写成

将式(1)代入式(3)并在方程左右两侧同时乘以,于是得到:
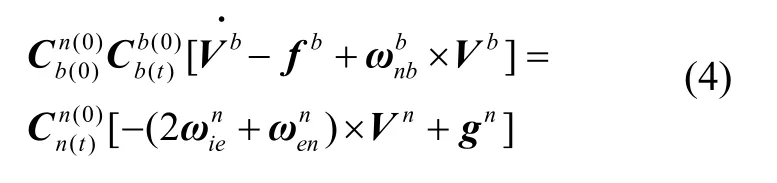
对等号两边同时进行积分
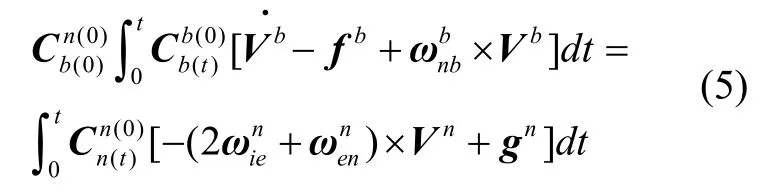
和分别是车体坐标系和导航坐标系的更新,它们可以通过式(6)的方法来进行确定。

其中,
其中,T为采样时间间隔,tk=kT,k=0,1,2,…,N-1;ΔV1、ΔV2与 Δθ1、Δθ2分别为惯导在T时间间隔内分两次采到的速度与角度增量,的值可以通过里程计的输出获得。
2.2 优化的QUEST算法
使用2.1所描述的方法之后,可以得到多个时刻的Gb(tN)与Gn(tN),计算初始姿态矩阵的过程其实就是寻找一个矩阵,使其可以尽量满足式(7)的关系。常用的方法有正交向量计算法和最小二乘法。但经过实验证明,正交向量计算法只利用最终时刻t以及t/2时刻的向量,信息利用不足,难以得到正确的姿态结果,最小二乘法得到的结果为非正交矩阵,需要多次正交化处理,且整个计算过程受随机误差的影响较大,有较大概率出现错误的航向角结果,稳定性较差。本文提出一种基于QUEST的优化算法,利用重力矢量模值误差与实时反馈的方法,实现了更加稳定快速的粗对准过程。
(1)QUEST算法
QUEST算法具有广泛的应用,其中一种便是应用于姿态估计。假设矩阵A为我们要求取的矩阵,可以定义如下的最优估计模型:

其中,与分别为同一变量在两个不同观测系下得到的值。ai为不同时刻信息的权重,视不同的应用情况而定。那么增益函数g(A)可以定义为

当L(A)达到极小,即g(A)达到极大时,矩阵A即为求得的最优结果。把g(A)写成如式(12)形式。

其中,

将式(12)改为姿态四元数进行求解,则增益函数可以重新表示为
其中,K为4×4矩阵
因此,想要取得极值需要满足g'()=0,即是K的特征向量,且λ取得最大时,对应的特征向量即为所求。因此,对于任何一个特征值λ,均有

其中Y的定义为

对应特征向量为
当λ取得最大值λmax时,Y与便可取得最佳姿态解Yopt与。由式(19)-(21)可以得到λ的表达式

其中a=σ2- tr(adjS),b=σ2+ZTZ,c= detS+ZTSZ,d=ZTS2Z。然后利用牛顿-拉夫逊算法对λ进行多次迭代求解,并将迭代的最终结果λmax代入到式(19)中,可以得到

其中X=(αI +βS+S2)Z。进而可以得到最优的姿态四元数结果

此时得到的四元数已无需进行归一化。再将结果转换为姿态矩阵代入式(1),即可得到实时的姿态角。
(2)算法优化
由(1)中的推导可知,只要观察记录同一个量在不同坐标系下的投影,即可得到两个坐标系之间的转换关系。因此我们用2.1节中的Gn(tN)与Gb(tN)分别代替QUEST算法中的与即可。
粗对准过程中,不同时刻计算得到的Gn(tN)或Gb(tN)均具有不同程度的误差,由式(10)可知,此时它们在算法中的权重ai应该是不同的。比较可靠的方法便是依靠“误差”的大小来对ai进行取值。
通过观察式(8)可以发现,式(8)的前半部分为t时间内里程计输出速度增量 ΔVod,理想情况下没有重力矢量信息的参与。后半部分为惯导输出的速度增量 ΔVimu,其中在竖直方向上的输出是有重力矢量参与引起的。二者相减再进行投影得到的便是重力矢量在b(0)坐标系下引起的速度变化 ΔVb。其原理如图2所示。
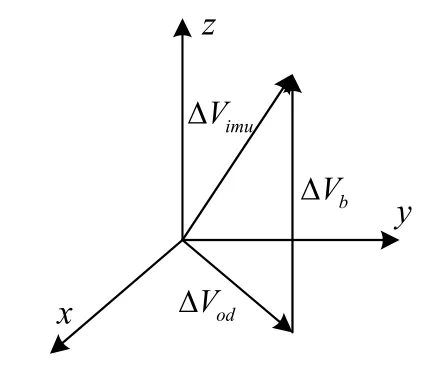
图2 b系天向速度增量的计算Fig.2 Calculation of Speed increment in vertical direction in body Frame
而式(9)相对简单,即T时间内重力矢量在n(0)坐标系下引起的速度变化。虽然重力矢量在不同坐标系下的投影不同,若忽略重力矢量的变化,其投影模值大小应等于重力矢量的模值。
基于以上分析,选择Gn(tN)、Gb(tN)与当地重力矢量在采样间隔时间T内积分模值的误差作为参数,定义误差函数

误差函数F可以根据实际效果调整。根据以上分析,首先提出一种误差计算方法:

遵循ei与误差成正比的原则。然后对该计算方法进行分析验证。
图3、4为一次实验的姿态、速度变化与ei值随运动变化的情况。
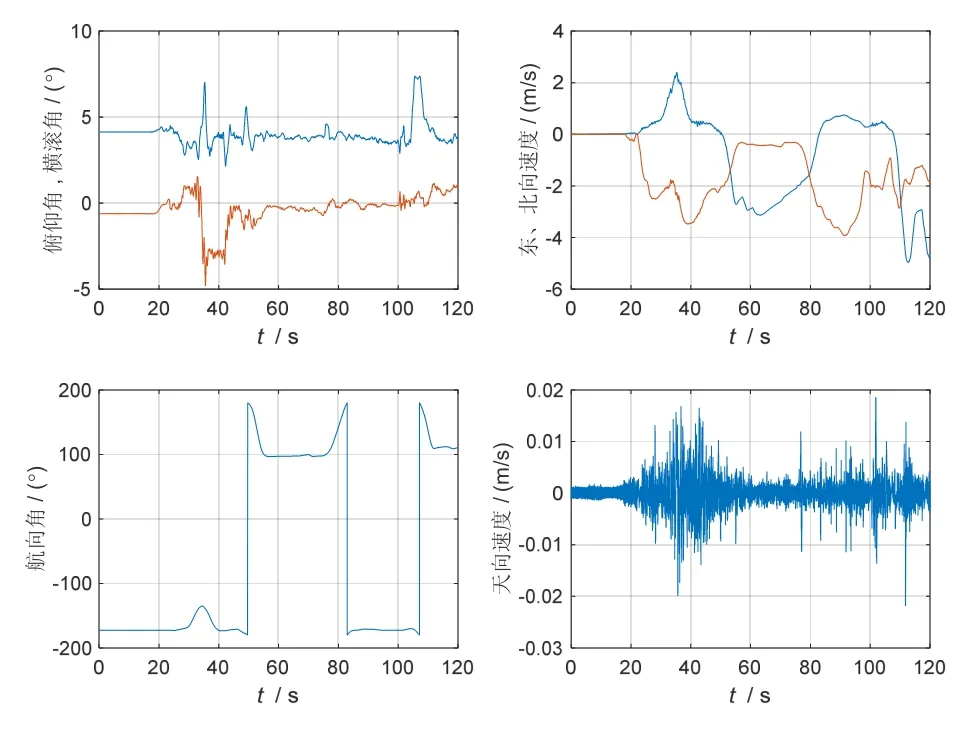
图3 姿态、速度变化曲线Fig.3 Curves of attitude and speed changing
由图3可以看出,在40 s左右时,水平姿态角变化较为剧烈,航向角稍有波动,反映到图4中即为ei值的增大,在110 s附近时,航向角变化剧烈,同样使得ei值变大。55 s到75 s以及85 s到105 s期间,尽管水平速度大小不同,但ei值总体保持平稳,仅在90 s处突然减速的瞬间产生了较高凸起。
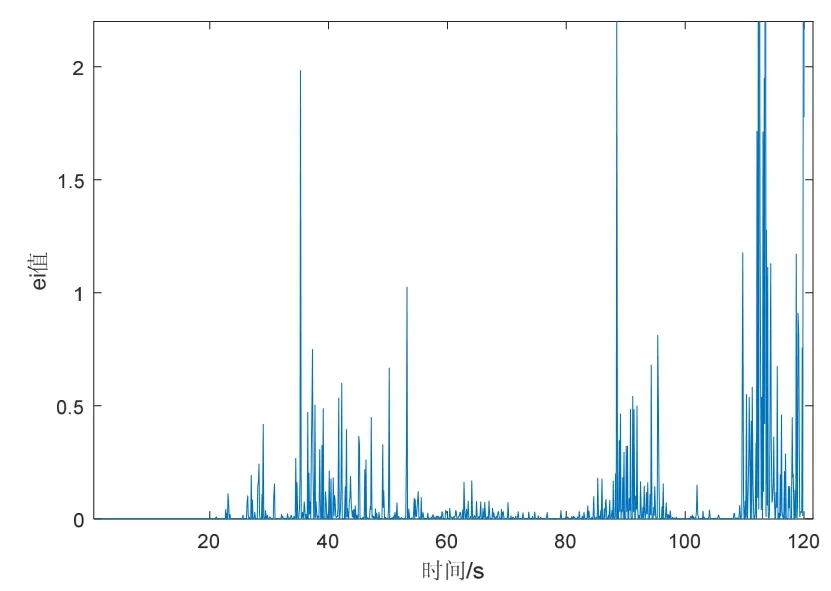
图4 值变化曲线Fig.4 Changing of
基于上述现象,再对式(8)(9)进行分析。式(9)中,的更新仅基于,与惯导里程计均无关,只要得到当前时刻的粗略姿态角结果,便可以结合里程计输出的速度计算得到,再将其补偿到中。的计算遵循公式(27)、(28)。
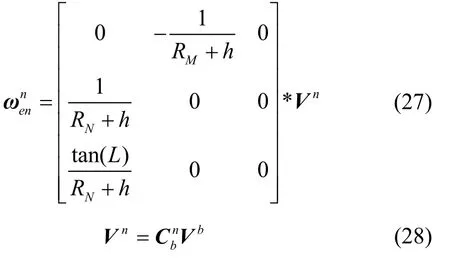
位置增量的计算遵循式(29)
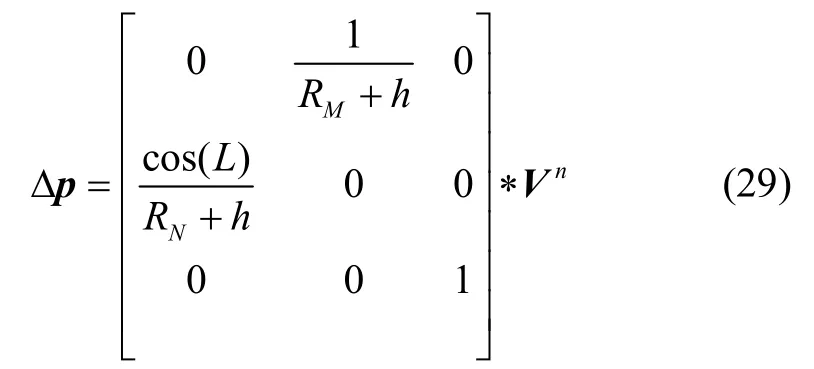
其中,L为当地纬度,RM与RN分别为子午圈和卯酉圈的主曲率半径,h为车载体的高程。
而式(8)中,--车体坐标系的更新依赖于陀螺仪的原始输出值,未经旋转、划桨效应等补偿,在姿态变化剧烈时会存在较大误差,--车体速度由里程计测得,路况以及突然启动或停止时都会对测量值造成一定的影响。
由此可见,对于QUEST算法来说,水平速度的大小相较于姿态角波动而言对算法的稳定性影响较小,但当加速度较大,如突然启动或停止时同样会造成较大影响。这与图3,4的实际测试结果相吻合,证明ei值可以很好地反映各时刻信息的误差大小。
根据ei大小可对信息的权重进行取值。当误差较小时,ai值可按比例取为较大值或1,使得当前时刻信息得到较完整保留。而当某一时刻误差很大时,ai值可以根据误差大小取较小值或取为0,减弱当前时刻信息对整个对准过程的影响。经实验验证,可有效减弱误差较大信息的影响。
3 实验结果分析
3.1 仿真实验
基于MATLAB平台设计了两条仿真线路,初始姿态为[4;0;98](俯仰,横滚,航向角/°),每条线路均进行5组测试。线路方案以及陀螺、加表参数分别列在表1与表2中。
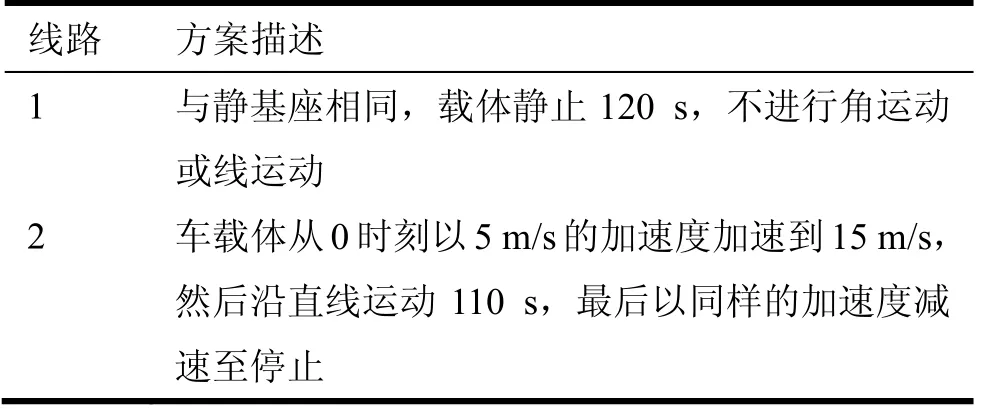
表1 线路方案Tab.1 Route plans
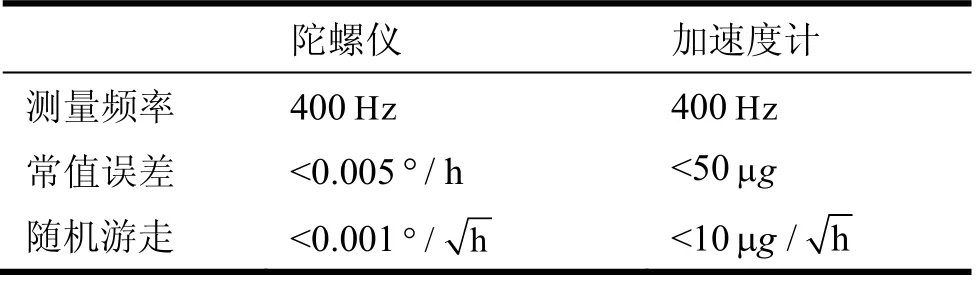
表2 陀螺仪和加速度计基本参数Tab.2 Basic parameters for gyroscopes and accelerometers
表3中分别给出了两条线路的粗对准姿态角误差。
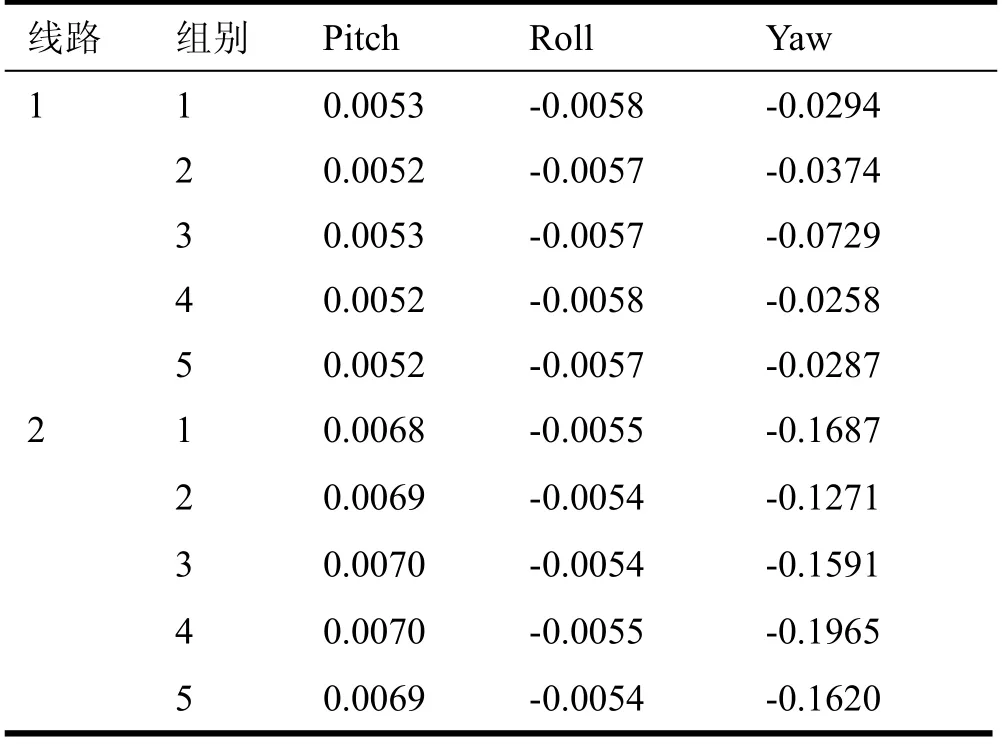
表3 粗对准误差(单位:°)Tab.3 Coarse alignment errors(°)
从线路1实验结果可以看出,本文提出的动基座粗对准算法在静基座条件下,粗对准航向角小于0.06 °,同样保持了较高的精度。从线路2的实验结果可以看出,当车载体运动时,粗对准结果略有下降,但仍然保持较高的精度水平。
基于线路2,给出了使用未经优化的算法与优化后算法的粗对准效果对比,如图5所示。
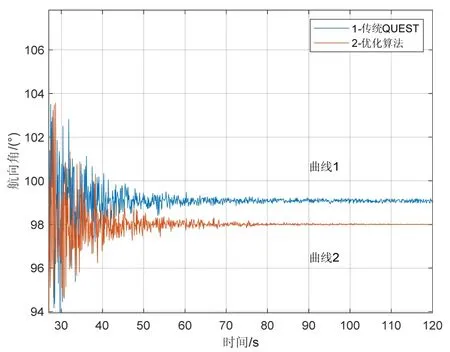
图5 航向角粗对准精度对比Fig.5 Comparison of yaw angle accuracy
图5结果表明,仿真条件下,使用经过优化改进后的算法,可以有效地提高粗对准的精度。
3.2 车载实验
采用某激光陀螺双轴转位惯性导航系统,固定于车载体之上,配合已标定好的里程计,进行了四组车载实验。实验设备布局如图6所示。

图6 车载实验设备构成Fig.6 Equipment arrangement in on-vehicleroad tests
实验路线如图7所示。实验路线全长约1.5 km,包含急转弯,长直路段。出发前首先静止1分钟,前半程位于校内,速度较慢,60 s左右进入公路((-250,-60)坐标处),开始加速行驶。
跑车结束后进行了静基座对准,得到一组实验车载体的姿态角[3.864;1.013;8.385](单位:°)。图6给出了一组实际测试中航向角收敛过程。
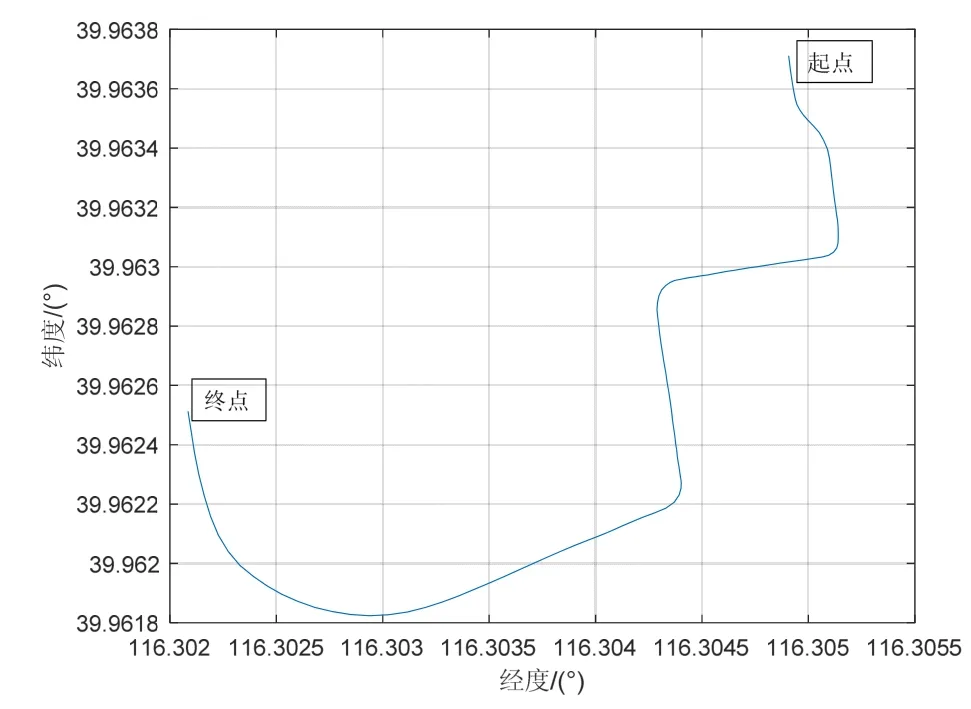
图7 实验路线Fig.7 Road testroute
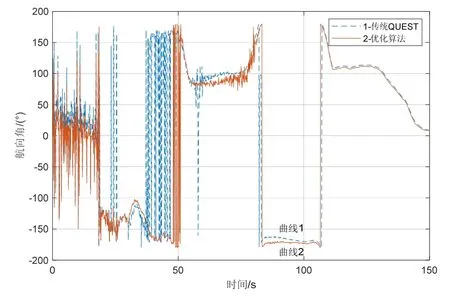
图8 实际测试中航向角变化曲线Fig.8 Changing of yaw angle in road tests
从图8中可以看出,在40 s到50 s转弯处,85 s及105 s转弯处,以及60 s进入长直路段加速处,本文中的优化算法相对于传统的QUEST算法,适应性更高,能够有效减少因误差较大的信息造成的波动,且粗对准精度较高,表4中给出了全部四组车载实验的粗对准算法对比情况。
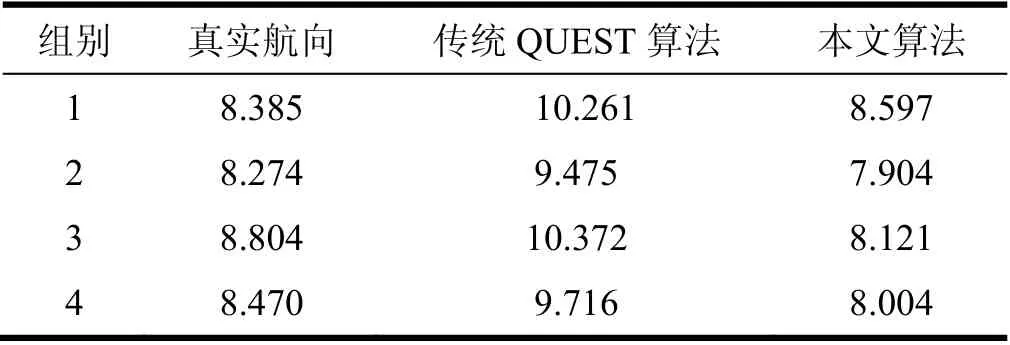
表4 车载实验粗对准算法对比(单位:°)Tab.4 Comparison of the coarse alignment algorithm in road tests(°)
从图7,8和表4可以看出,在实际应用中,该粗对准算法对路况以及速度的变化有较强的适应性,并且有效减弱了误差较大信息的影响,保持较高的对准精度,在150 s内航向角误差已经缩小到 ± 2°范围内,完全满足精对准需求。证明该算法具有很好的实用性。
4 总 结
本文提出了一种基于里程计辅助的QUEST优化算法。由于小量的忽略和误差的累积,每个时刻的信息权重并不相同,因此采用了与重力矢量之间的模值误差为权重参考,并进行实时反馈修正,减小误差影响。最后设计多次试验,证明了该算法的准确性以及对于实际应用中车载体运动的适应性。从实验结果可以看出,该算法可以实现车载体行进间的粗对准,适应性较强,能够得到较高精度的姿态估计。
猜你喜欢
导航定位学报(2022年5期)2022-10-13
舰船科学技术(2022年10期)2022-06-17
中国惯性技术学报(2019年1期)2019-05-21
专用汽车(2018年10期)2018-11-02
当代陕西(2018年12期)2018-08-04
北京航空航天大学学报(2018年1期)2018-04-20
中国惯性技术学报(2017年1期)2017-06-09
中国惯性技术学报(2017年1期)2017-06-09
导航定位与授时(2016年6期)2016-03-16
弹箭与制导学报(2016年5期)2016-03-02