基于转台误差隔离的捷联惯导系统尺寸效应参数标定
2020-06-13 05:42杨广强王志涛梁化勇阴丽娟
中国惯性技术学报 2020年1期
杨广强,王志涛,梁化勇,李 林,阴丽娟
(1.中国兵器工业导航与控制技术研究所,北京 100089;2.中国人民解放军32381部队,北京 100072)
由于存在设计受限、机械加工及装配误差等原因,捷联惯导系统中三个加速度计的加速度敏感点不重合,在载体角运动过程中会引入附加比力,称为尺寸效应[1-3]或内杆臂效应[4-6]。随着捷联惯导系统精度日益提升,其应用环境也更加复杂多样,尺寸效应误差不能忽略,需进行标定与补偿。
现有文献中的尺寸效应标定方法主要可以分为两类[7]:基于三轴转台的分立式方法[8]和基于卡尔曼滤波的系统级方法[9]。传统分立式方法简单直观,但严重依赖转台精度,对转台铅垂度、正交度均作理想假设。特别地,文献[8]进一步要求转台三个旋转轴交于一点。基于卡尔曼滤波的系统级方法能够克服分立式方法的一些不足,但其自身也存在无法获得解析解、可观性受限以及收敛速度慢等诸多问题。另外,国内针对系统级方法的相关研究起步较晚,工程应用不多,方法远不成熟[10]。文献[10]基于模观测标定方法提出了转动激励模和矢量观测标定方法,降低了标定对转台的依赖,但该方法不能完成尺寸效应参数的标定。
针对上述问题,提出了一种基于转台误差隔离的捷联惯导系统尺寸效应参数标定方法。该方法属于分立式方法,但无需对转台铅垂度、正交度及旋转中心等作理想假设,也不需要转台转角、转速等作为输入,仅依靠陀螺组件、加速度计组件输出即可完成标定。通过不同转速下的重复标定试验验证了方法的稳定性,通过摇摆环境下的纯惯性定位试验验证了方法的有效性。
1 加速度计尺寸效应模型
图1展示了加速度计组件在捷联惯导系统中的安装关系。捷联惯导系统的陀螺组件和加速度计组件通过标定技术可以规范化至同一正交坐标系,称为载体坐标系b。图中三个圆柱体为加速度计,中心黑点为各加速度计敏感点,ax、ay、az为各自敏感轴单位矢量。为叙述方便,以X加速度计敏感点为原点,以加速度计组件的三个敏感轴方向为坐标轴建立非正交坐标系,称为加速度计组件坐标系a。
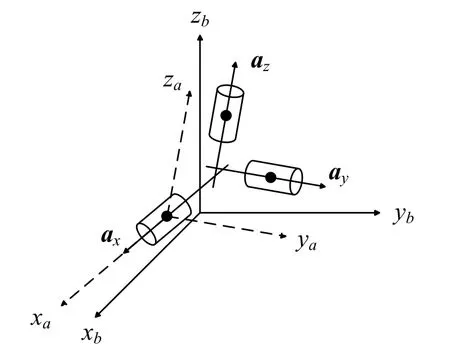
图1 尺寸效应示意图Fig.1 Diagram of size effect
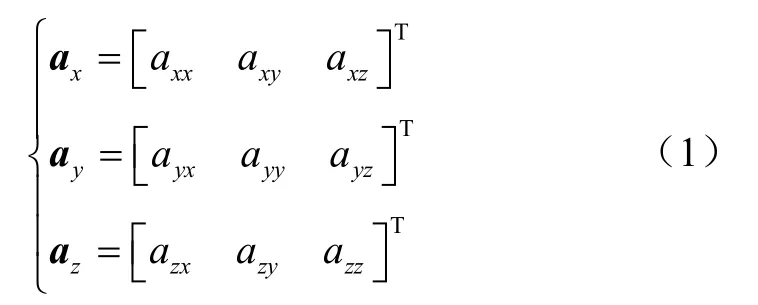
三个加速度计敏感轴单位矢量在b系的投影为:
b系到a系的转换矩阵

a系到b系的转换矩阵

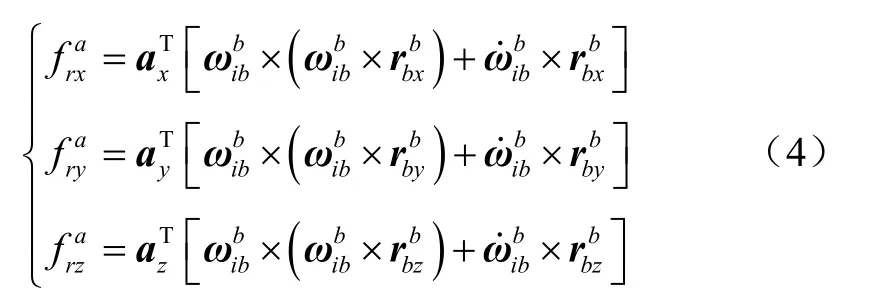
根据文献[8],各加速度计由尺寸效应导致的比力偏差为
2 尺寸效应参数自标定方法
2.1 参数辨识模型
根据b系定义,设
其中,Ryb、Rzb为b系下Y、Z加速度计相对X加速度计的位置矢量。
尺寸效应参数标定采用定轴匀速旋转策略,角加速度影响可忽略不计,将式(5)带入式(4)有
加速度计组件在b系的测量值

即

其中
由于向心力始终与旋转轴垂直,式(10)等号右侧第1项为0,可进一步化简为
式(11)中,lb可根据定轴旋转陀螺组件输出的平均值求出,fb、分别为加速度计组件、陀螺组件输出的瞬时值,gb可根据静止状态加速度计组件输出的平均值求出。也就是说,除Ryb、Rzb外,式(11)中各项均已知或可通过加速度计组件和陀螺组件测量得到。选择合适的标定流程,即可对Rby、Rzb进行求解,详细步骤将在2.2节论述。
基于式(11),仅通过捷联惯导系统自身输出即可完成尺寸效应参数标定,既不需要对三轴转台铅垂度、正交度等做出假设,也不需要转台姿态角、转速等作为已知输入。特别是式(11)中不包含与转台旋转轴相关的R0b项,仅要求单次定轴转动中b系坐标原点相对转台旋转轴的位置矢量保持不变即可,而不要求整个标定流程中不同位置的多次定轴转动中b系坐标原点相对转台旋转轴的位置矢量均保持一致。也就是说,基于式(11)设计的标定方法不需要假设转台三个旋转轴交于一点。综上所述,基于上述参数辨识模型设计的尺寸效应参数标定方法从原理上降低了标定方法对转台的依赖。
从式(4)和式(11)不难发现,捷联惯导系统尺寸效应参数的标定和补偿均以加速度计安装关系矩阵的正确标定为前提。对于工程上常用的分立式标定方法,转台正交度误差直接影响Mba标定精度。例如,转台长期使用过程中,惯导重复拆装易造成中框零位变化,最大变化量可达角分级,对Mba中相应元素的影响也为角分级。在静态寻北过程中,1角分安装误差约导致0.3密位航向误差。在动态导航过程中,1小时内纯惯性导航定位误差可能由百米量级增大到公里量级。Mba标定中的转台误差隔离问题不是本文讨论的重点,相关内容可参考文献[10]。
2.2 标定流程设计
加速度计组件的安装误差角均为小量,为简化分析过程,不妨将均视作单位矩阵,即
设


显然

将式(12)~(15)带入式(11)有

其中
式(16)中共6个未知元素,至少需要6组测试来完成方程求解。其中,每组测试包含1个静态测试和1个定轴匀速旋转测试。静态测试用以获取gb,动态测试用以获取fb和,lb和Kω均可由求得。需要特别指出的是,静态测试位置可选为相应定轴匀速旋转测试中捷联惯导系统所经过的任一位置,这是由于lbT·gb在定轴旋转过程中始终为定值。
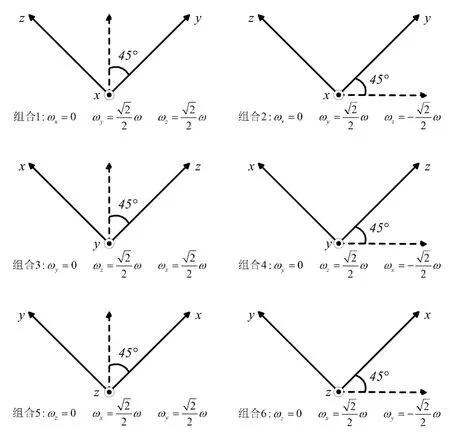
图2 尺寸效应参数标定流程Fig.2 Calibration procedure of size effect parameters
设定轴匀速旋转测试角速度为ω,即选取如图2所示6个角速度组合进行定轴匀速旋转测试,图中虚线表示旋转轴方向,实线表示各加速度计敏感轴方向。实际标定过程中,旋转轴可固定为三轴转台外框轴,通过调整中框、内框达到各组合状态。将上述6个角速度组合分别代入式(16),联立方程组,等式右侧

其中
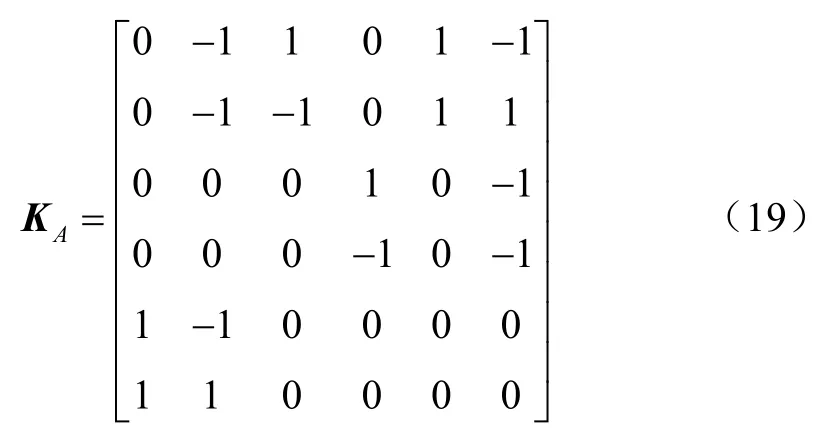
矩阵KA满秩,条件数为2.618,非奇异,可通过最小二乘法求解R。
2.3 载体坐标系原点位置优化
从2.1节和2.2节的分析不难看出,选取任意一点为载体坐标系原点均可得到相应的尺寸效应参数。尺寸效应参数本质上是加速度计间的相对位置关系,可由6维向量完全表示。载体坐标系原点的选取不影响尺寸效应标定精度。
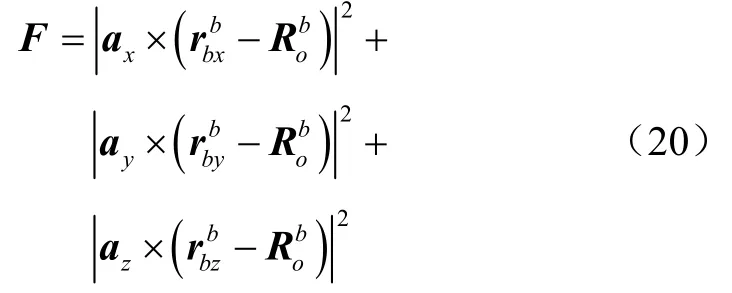
对式(20)求偏导数有
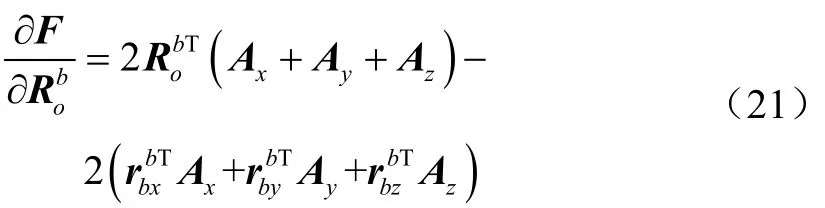
其中
当式(21)偏导数为0时,优化函数取到最小值,即

与前文推导过程相适应,有

优化后的尺寸效应参数
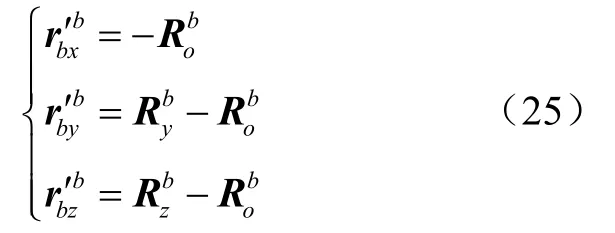
事实上,式(23)与文献[8]的推导结果完全一致,但矩阵形式的表达更为简洁,有助于理解其物理含义。
3 试验验证
3.1 重复性测试
为避免逐次启动重复性对试验结果影响,标定及验证试验在一次通电并充分预热的恒温条件下进行。捷联惯导系统陀螺零偏稳定性优于0.005 °/h,加速度计零偏稳定性优于2×10-5g。温控三轴转台角位置定位精度优于3′,速率精度及平稳性优于5×10-5(360°平均),温度波动度优于±0.5 ℃。
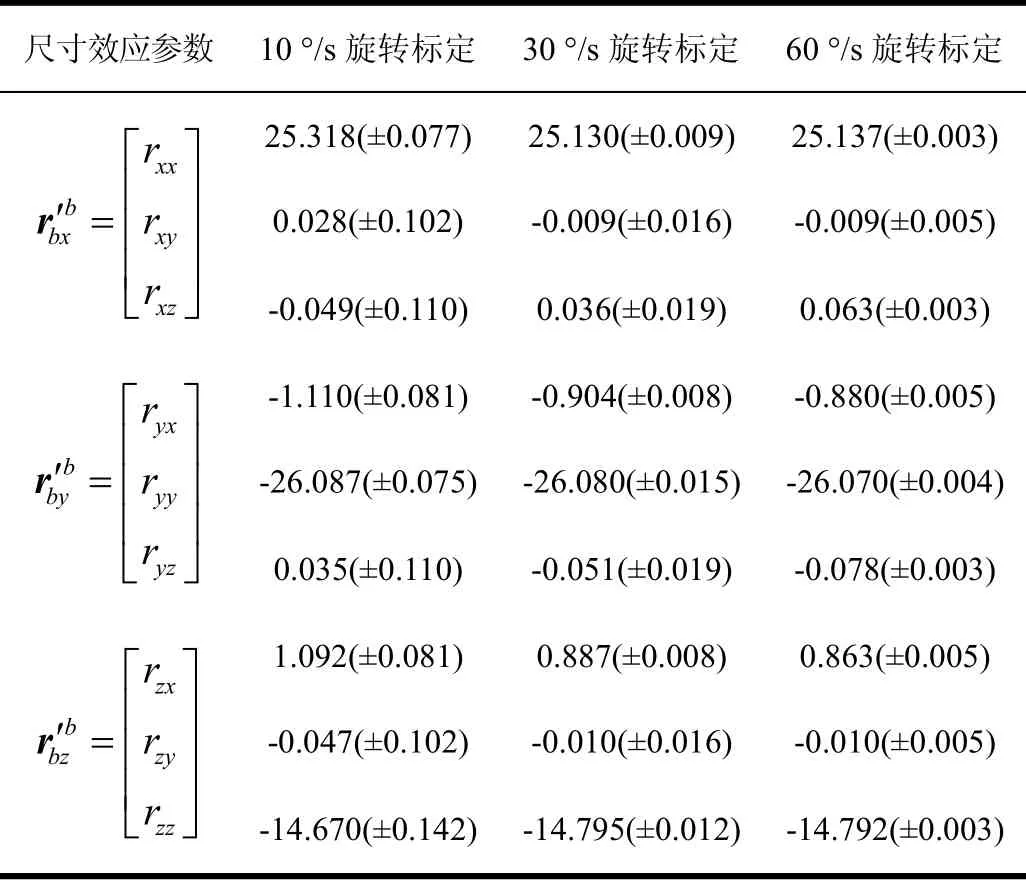
表1 加速度计组件尺寸效应参数(毫米)Tab.1 Size effect parameters of the cluster of accelerators(mm)
分别采用10 °/s、30 °/s和60 °/s转速进行加速度计尺寸效应参数标定,各标定7次,尺寸效应参数均值及标准差见表1。
10 °/s旋转标定,尺寸效应参数标准差不大于0.15 mm;30 °/s旋转标定,尺寸效应参数标准差不大于0.02 mm;60 °/s旋转标定,尺寸效应参数标准差不大于0.01 mm。可以看到,标定转速越大,尺寸效应参数标准差越小,即标定方法重复性越好。另外,随着标定转速增大,尺寸效应参数逐渐收敛,30 °/s和60 °/s旋转尺寸效应参数均值之间的误差已不大于0.03 mm。
3.2 有效性测试
通过摇摆状态下纯惯性导航试验,验证捷联惯导系统尺寸效应参数标定方法的有效性。捷联惯导系统水平放置在三轴转台上,静置1000 s,然后转台外框进行正弦摇摆运动,摇摆幅度30 °,摇摆频率0.15 Hz,持续4000 s后停止摇摆。捷联惯导系统初始对准时间设为600 s。基于以上采样数据,分别在不补偿尺寸效应参数及补偿前述3种标定条件下所得尺寸效应参数的情况下,计算捷联惯导系统纯惯性导航定位误差(图3)及各时刻位置误差均值(表2)。
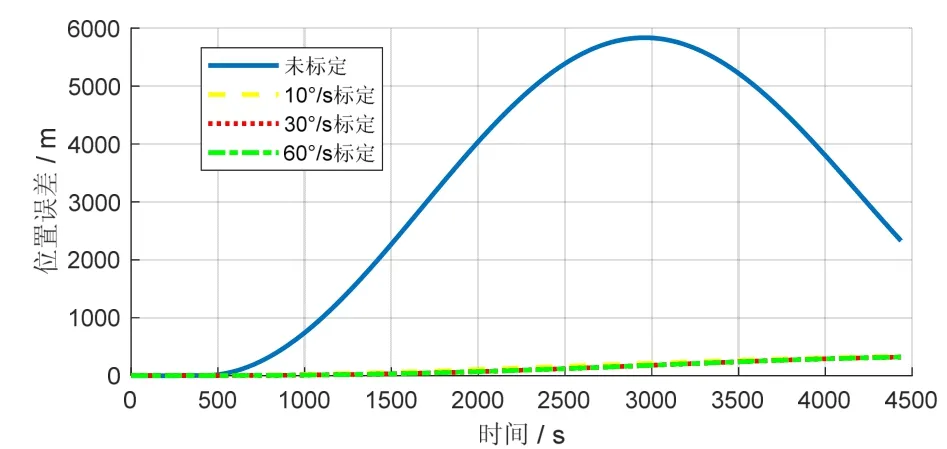
图3 尺寸效应补偿定位误差比较Fig.3 Comparison of the position error of size effect compensation

表2 尺寸效应补偿平均定位误差比较(米)Tab.2 Comparison of the mean position error of size effect compensation(m)
不补偿与补偿尺寸效应参数相比,平均定位误差由补偿前的3100 m以上减小到补偿后的150 m以内,误差降低幅度达95%以上。随着标定转速的增大,定位误差也逐渐降低。具体而言,30 °/s旋转标定与10 °/s旋转标定相比,平均定位误差降低约15%;60 °/s旋转标定与30 °/s旋转标定相比,平均定位误差略有降低。
可见,基于转台误差隔离的捷联惯导系统尺寸效应参数标定方法能显著提高捷联惯导系统摇摆状态下的纯惯性定位精度。
在一次通电并充分预热的恒温条件下,60 °/s旋转标定与30 °/s旋转标定相比,尺寸效应参数标准差由不大于0.02 mm提升到不大于0.01 mm,平均定位误差仅略有降低(不大于1%)。以60 °/s转速为例,0.01mm尺寸效应参数标定误差造成的加速度误差约为1 μg。考虑到实际使用环境(温度变化及逐次启动重复性),捷联惯导系统加速度计逐次启动零偏重复性约为20 μg。从工程应用角度而言,0.01 mm的尺寸效应参数标定精度对其性能提升帮助有限。
4 结 论
基于转台误差隔离的捷联惯导系统尺寸效应参数标定方法不需要转台转角、转速等作为输入,完全依靠惯性器件输出完成尺寸效应参数标定,从原理上降低了标定对转台的依赖,在转台精度受限的情况下,使高精度惯导的标定成为可能。
不同标定转速下的重复试验表明,基于转台误差隔离的捷联惯导系统尺寸效应参数标定方法具有良好的重复性。摇摆状态下的捷联惯导系统纯惯性定位试验表明,该方法能够显著提高角运动情况下系统纯惯性定位精度,定位误差降幅达到95%以上。
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
中国惯性技术学报(2019年1期)2019-05-21
北京航空航天大学学报(2018年1期)2018-04-20
北京航空航天大学学报(2017年5期)2017-11-23
中国惯性技术学报(2017年1期)2017-06-09
中国惯性技术学报(2017年1期)2017-06-09
北京航空航天大学学报(2017年12期)2017-04-23
火控雷达技术(2016年1期)2016-02-06
探测与控制学报(2015年4期)2015-12-15
弹箭与制导学报(2015年1期)2015-03-11