一种锚泊条件下捷联惯导系统级标定方法
2020-06-13 05:42杨小康严恭敏李四海
中国惯性技术学报 2020年1期
杨小康,严恭敏,李四海
(西北工业大学自动化学院,西安 710129)
惯性测量组合(IMU,Inertial Measurement Unit)是惯性导航系统的核心,IMU标定的目的是确定其数学模型或误差数学模型的参数[1],标定结果直接影响导航精度[2]。目前常见的是捷联惯性测量组合(SIMU),SIMU通常由三个陀螺和三个加速度计组成,陀螺和加速度计输出中存在零偏误差、刻度系数误差、安装误差和随机噪声[3]。标定分为分立式标定和系统级标定,前者根据各个陀螺和加速度计输出与参考输入间的关系进行标定,后者则是基于导航解算误差原理,利用导航误差估计惯性器件误差[2]。相比于分立式标定,系统级标定可以实现外场标定和惯导系统自标定,标定精度不依赖转台精度,不需要记录陀螺和加速度计输出数据[4]。无论是高精度SIMU还是消费级SIMU都可以通过多位置转动实现基本误差参数标定[5]。SIMU标定大多在实验室环境进行,标定时拆卸和搬运设备给SIMU维护带来不便[6],因此需要研究非实验室环境下外场标定和自标定技术。
外场环境的干扰运动使标定量测不准确,影响SIMU标定结果,所以外场试验需要对标定方法进行改进。对于低精度SIMU可以通过检测转动过程中的静止状态,在手动转动条件下完成标定,试验表明此方法可以估计出陀螺和加速度计刻度系数误差及安装误差[7]。外场标定研究大多在陆上或者舰船系泊状态下进行[8,9],舰船锚泊条件下的研究尚未见相关文献,但研究舰船锚泊条件下SIMU外场标定方法有很大的应用价值。首先,大型舰艇的自持力不断提升一般可以达到60天甚至更长,一次出海周期可达1年,期间没有条件对SIMU进行实验室环境标定。其次,舰船上武器装备种类多、数量大,对使用中低精度SIMU的战术武器,简单标定后补偿SIMU器件误差能显著提升其导航精度。
在地面环境进行外场标定时可保持SIMU静止,转位机构使SIMU转过不同角位置,利用滤波方法估计出SIMU器件误差。但是舰船在水面上会受到风浪等各种因素影响,即使在锚泊状态也不是静止不动的。受到风和海浪的影响,舰船会产生沿着船体坐标系三个轴的线运动和角运动[10]。锚泊状态,船体在锚链力作用下还会出现偏荡运动。偏荡运动是锚泊船在风、流、浪和锚链力的约束作用下,围绕锚泊作用点产生的周期性低频振荡状态[11]。因为锚泊条件下舰船会受到锚链力和风、浪、流等作用力的综合影响,所以与系泊条件相比锚泊运动速度更大且规律性较差。进行锚泊条件系统级标定时无法消除锚泊运动的影响,因此锚泊条件下进行系统级标定难度更大。
本文针对在舰船锚泊和无其他导航系统辅助条件下进行SIMU系统级标定的问题,首先建立舰船锚泊条件下运动简化模型,分析锚泊运动特点,得到标定时干扰运动的规律。然后根据惯导误差方程建立捷联惯导误差状态空间模型,设计卡尔曼滤波器,再根据锚泊运动干扰速度设置合适的滤波参数使SIMU误差参数估计结果收敛、稳定。最后进行仿真,并比较静基座和锚泊条件系统级标定结果,检验锚泊条件系统级标定的效果。
1 海上锚泊运动模型
舰船在水面运动时,产生的横荡、纵荡、升沉、艏摇、横摇和纵摇都是周期性运动,周期一般在1~30 s之间[10]。船体产生偏荡运动时,重心将描绘一个与风向横交的“∞”形轨迹。偏荡运动的横移幅度和船艏转动角度都会随着风速和链长增加而增加。图1是一种真实的偏荡运动轨迹[11],图中O为偏荡中心,Ox轴为横荡方向,Oy轴为纵荡方向。为了方便分析,对偏荡运动模型进行简化,以横纵方向两个垂直的周期运动来描述偏荡运动。
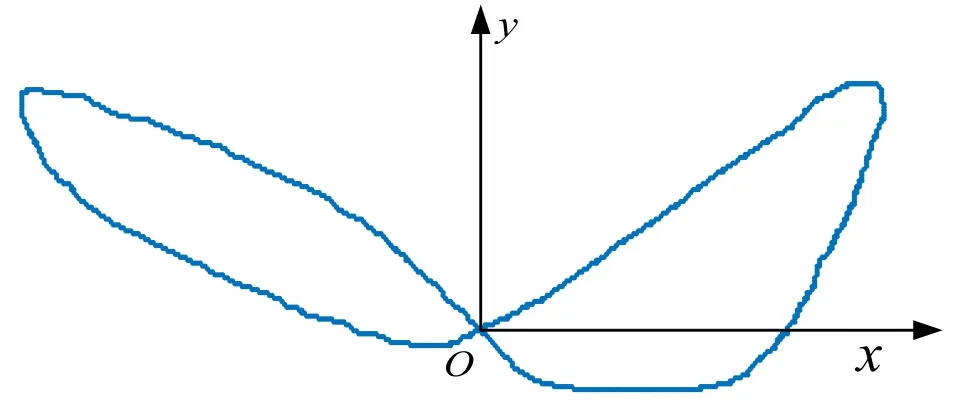
图1 一种偏荡运动轨迹Fig.1 A trajectory of the anchoring motion
偏荡运动模型包含横向、纵向位移以及运动周期三个参数,分别用sx、sy和T表示。简化后偏荡运动数学模型为
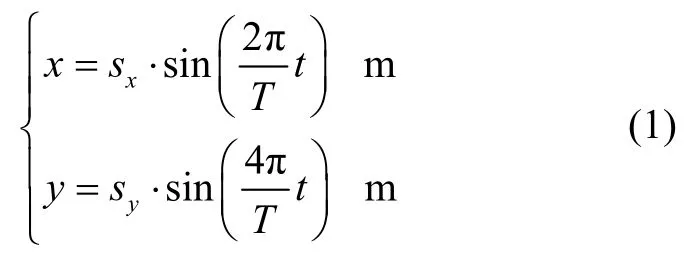
式中,x表示横荡方向位置坐标,y表示纵荡方向位置坐标。偏荡距离sx与平均偏荡速度关系为

偏荡运动横向平均速度的估算公式为

式中,vas表示风速,Ba/Ld表示舰船水线上下侧面积比,P/Lpp表示风作用中心到船中心距离与两柱间长之比,Lc/H表示链长与水深之比。根据上述参数计算出偏荡运动平均速度,再由式(2)计算横向运动幅度。舰船纵向偏荡运动幅度小于横向幅度,一般为横向幅度的0.2~0.6倍,即

根据式(1)~(4)可以估算出偏荡运动速度和位置。
在后文锚泊条件系统级标定仿真中,假设偏荡运动的横荡幅度为75 m,纵荡幅度为30 m,偏荡运动周期为600 s。偏荡运动简化模型轨迹如图2所示。
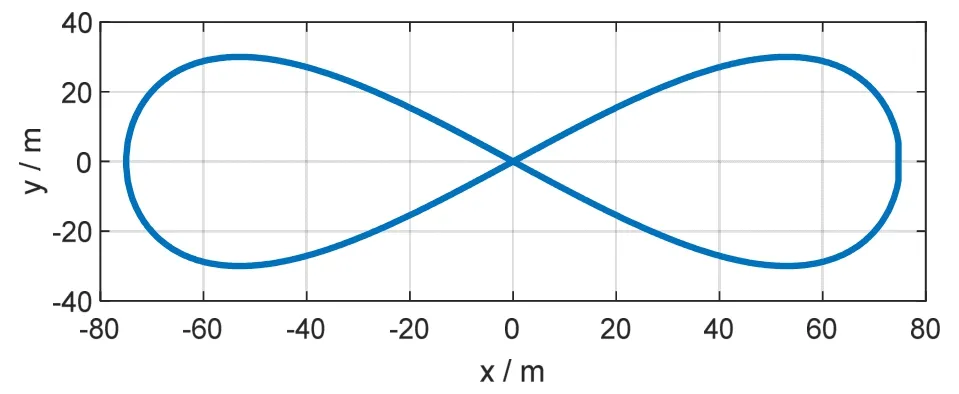
图2 简化后偏荡运动轨迹Fig.2 Simplified trajectory of the anchoring motion
2 SIMU静基座系统级标定方法
系统级标定常用卡尔曼滤波,将SIMU误差参数作为状态量。陀螺输出角速度误差和加速度计输出比力误差为
式中,δKg和δKa分别是陀螺和加速度计刻度系数误差矩阵,εb和 ∇b分别是陀螺和加速度计常值零偏。δKg和δKa均是3阶方阵,由于存在安装误差角约束,只需要估计两个矩阵中的9个安装误差。所以在误差模型中设定

后文用δkgii和δkaii表示刻度系数误差,δkgij和δkaij(i≠j)表示安装误差。
根据捷联惯导误差方程,选取卡尔曼滤波状态空间模型30维状态向量为

式中,φ=[φEφNφU]T为姿态失准角,δvn为导航系下速度误差,δp=[δLδλ δh]T为导航位置误差(三个分量依次为纬度误差、经度误差和高度误差),Xg和Xa分别为陀螺和加速度计刻度系数误差矩阵中元素组成的列向量

根据捷联惯导误差方程和式(8)给出的状态向量,构建滤波器系统方程

式中,F为状态转移矩阵,G为系统噪声分配矩阵,W为陀螺和加速度计输出中的白噪声向量。F中各个元素根据捷联惯导误差方程确定。
静基座系统级标定时SIMU速度为零且位置不变,所以可以选择零速度和初始位置作为导航结果基准,以此构建量测方程

式中,vn表示惯导输出导航系速度,p=[Lλh]T为惯导输出位置向量(纬度、经度和高度),p0表示初始位置,观测矩阵H=[06×3I6×606×21],V为量测噪声。
标定过程中还需要通过状态可观测性分析,确定合适的转台转动方案,使状态向量中SIMU误差参数全部可观。表1列出了一组包含15次转动的转动编排方案[12],初始时刻SIMU坐标系“X-Y-Z”轴指向“东-北-天”。静基座系统级标定实验中每个位置通常静止60s,动基座标定实验中可根据标定条件增加每个位置静止时间。

表1 系统级标定转动编排Tab.1 Rotation plan of system-level calibration
按照图3所示在三轴转台上安装SIMU,依表1给出的转台转动方案进行一组15位置转动,每次转动后静止一段时间。利用标定过程的SIMU输出完成卡尔曼滤波就可以估计出SIMU误差参数。

图3 系统级标定SIMU安装示意图Fig.3 SIMU install sketch of system-level calibration
3 舰船锚泊条件系统级标定
系统级标定中,根据式(11)和式(12)可得离散化状态空间模型

式中,Φk/k-1为状态一步转移矩阵,Γk/k-1为系统噪声分配矩阵,Hk为观测矩阵;Wk为系统噪声,Vk为量测噪声,两者互不相关,且。因为静基座下量测准确,Rk设置较小的值即可,而动基座标定算法中,需要根据运动特点选取合适的量测噪声参数。
在锚泊条件下,舰船速度和位置不断变化,在无其他导航系统辅助的条件下无法得到准确的惯导误差。如果用惯导速度和位置作为滤波量测,则锚泊运动的速度和位置都会影响SIMU误差参数的估计精度,所以锚泊条件系统级标定只用速度误差作为量测,在算法设计时只需考虑锚泊运动速度干扰的影响,便于滤波器量测噪声参数设置。在锚泊条件下,SIMU输出速度为

式中,vn为惯导系统输出速度,为SIMU器件误差激励出的速度误差,vw为舰船短周期振荡速度,va为舰船锚泊偏荡运动速度,Vk为量测噪声。记,则量测向量为

在卡尔曼滤波更新中,滤波增益更新为

状态更新公式为

根据式(15)和式(17),锚泊条件系统级标定的状态更新公式为
式中,由锚泊运动引起的KkZa,k会影响系统级标定状态更新结果。
按照静基座系统级标定参数设置经验,量测噪声方差阵一般取值较小,按式(16)和式(18)计算卡尔曼滤波过程状态更新时,速度误差量测向量中锚泊运动产生的干扰会影响SIMU误差参数估计。以陀螺和加速度计安装误差角为例,当速度量测误差设置为0.01m/s时进行不同条件的4组锚泊条件系统级标定,补偿后的两个误差角δkg31和δka31如图4和图5所示。由于量测误差小,滤波时锚泊运动干扰速度会被错误地引入惯导系统误差估计中,使得误差参数估计结果随锚泊运动波动,影响误差参数估计。

图4 系统级标定过程 δkg31的变化Fig.4 Plot of δkg31in system-level calibration process
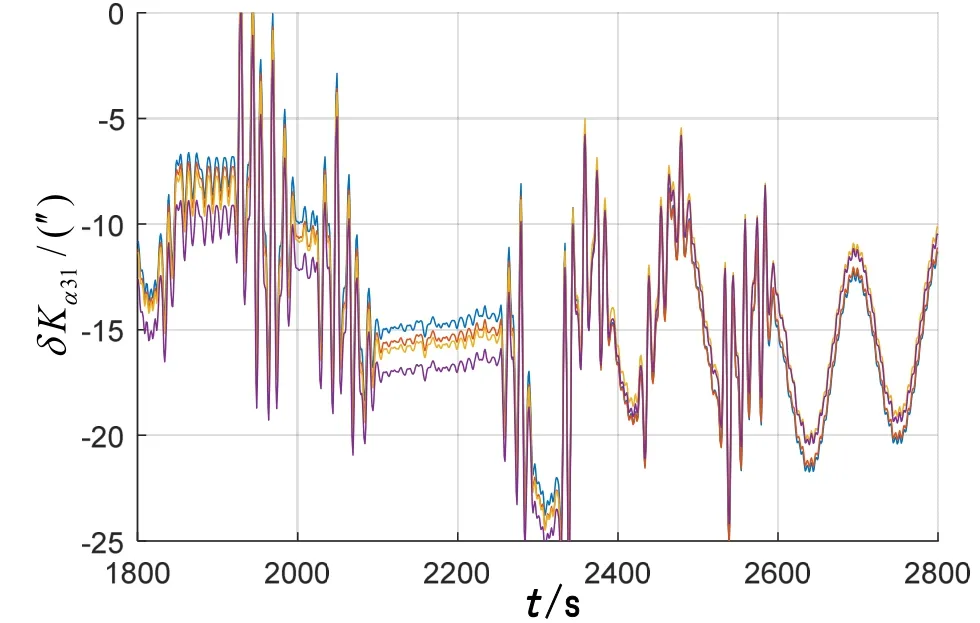
图5 系统级标定过程 δka31的变化Fig.5 Plot of δka31in system-level calibration process
根据以上分析,锚泊条件系统级标定时应当按照锚泊运动速度大小设置Rk,以减小干扰速度的影响。可以设置速度量测噪声方差为最大锚泊运动速度k倍的平方,即

式中,diag(v)表示向量v作为对角元素构成的对角阵,Za,max表示锚泊运动最大速度,参数k可取不同值进行锚泊条件系统级标定仿真,根据仿真结果确定合适的数值。假设舰船锚泊状态下两个水平速度波动幅度均为0.6 m/s,垂向速度波动幅度为0.2 m/s。设置不同的惯导误差参数,取k为0.001、0.01、0.1和1分别进行20次系统级标定蒙特卡洛仿真,得到SIMU各类误差项标定补偿后残差的最大值,如表2所列。
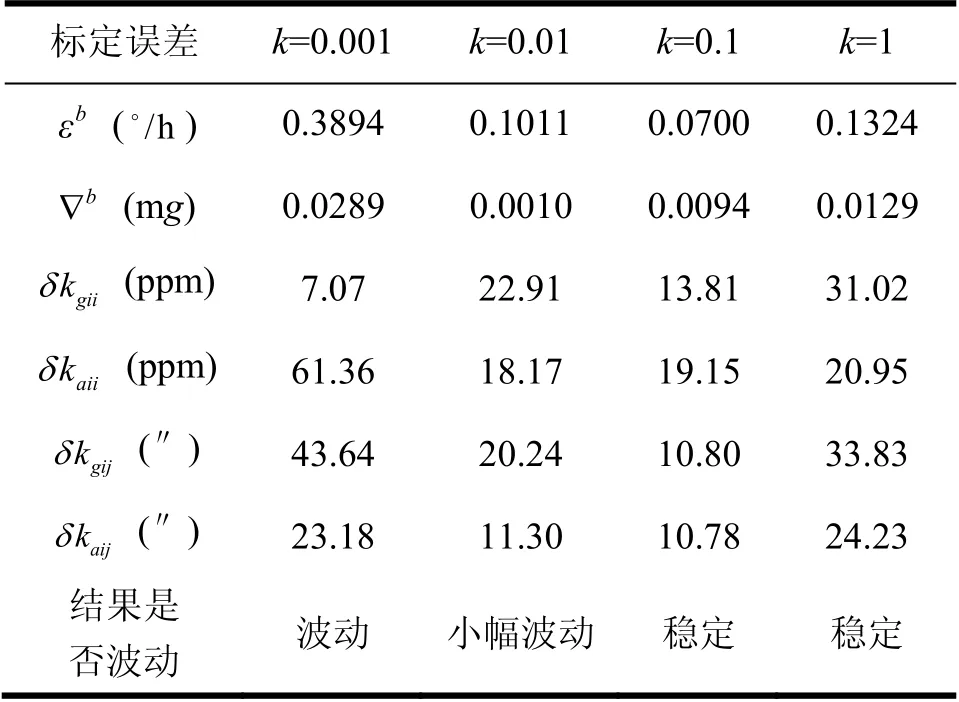
表2 不同量测噪声方差下的系统级标定结果Tab.2 Calibration result with different variance of measurement noise
表2中所示的各标定误差为同类误差的最大值。根据表2中的仿真结果,锚泊条件系统级标定时应取k= 0.1,按0.1倍最大锚泊速度设置速度量测噪声方差阵得到的标定结果比较准确,且滤波器状态估计值不随干扰运动波动。为了在SIMU标定时得到更准确的标定结果,还可以在0.1附近继续取值进行仿真,寻找更优的量测噪声参数。
进行舰船锚泊条件系统级标定实验时,可根据海上风、浪和舰船特征等参数估算出锚泊运动幅度和周期,然后建立海上锚泊运动模型并进行仿真分析,确定出合适的量测噪声方差参数,以得到锚泊干扰下最准确的SIMU误差参数标定结果。
4 系统级标定仿真
仿真中设置4组不同的SIMU误差参数,每组仿真5次,误差参数如表3所列。以每一类误差标定补偿后残差的最大值来进行标定结果比较。

表3 SIMU误差参数表Tab.3 Error parameter table of SIMU
为了方便比较,分别进行静基座条件和锚泊条件两组系统级标定仿真。静基座系统级标定根据表1的方案进行转动,标定时间为1400 s,标定结果如表4所列,经过标定补偿后捷联惯导误差中陀螺零偏数值较大,其余误差显著降低。
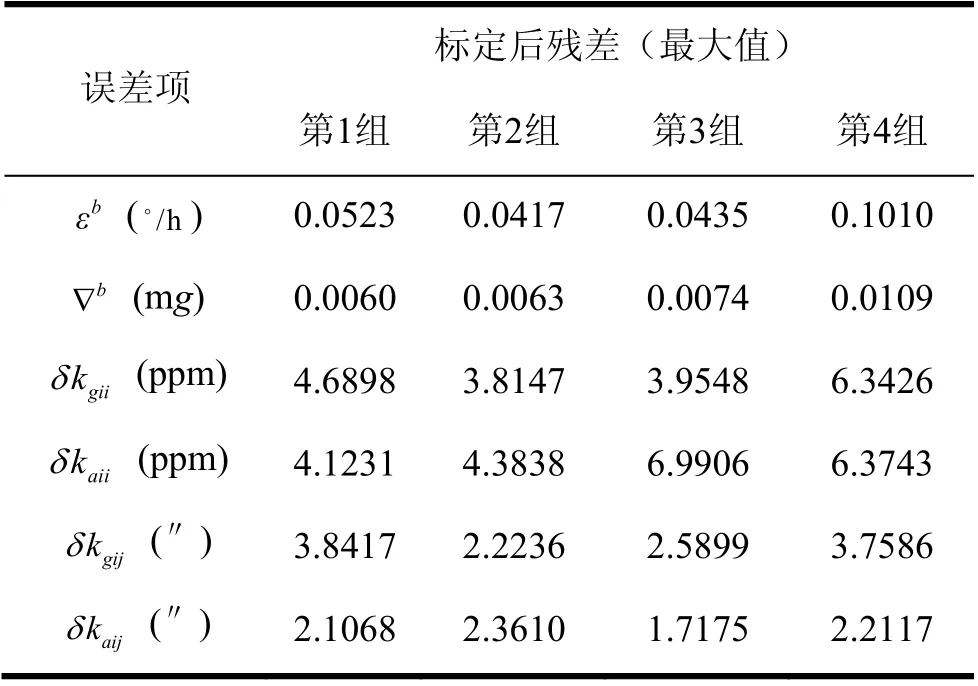
表4 静基座系统级标定误差Tab.4 Result of system-level calibration on stationary base
锚泊条件动基座系统级标定仿真时按照第1节中的简化偏荡运动模型进行舰船偏荡运动仿真。同时加入幅值为7°的横摇运动,15°的纵摇运动,0.25m的横荡和纵荡,以及0.5m的升沉运动,以上运动的周期为10s。由于锚泊条件系统级标定中量测噪声方差较大,量测中存在锚泊运动干扰,因此与静基座条件相比量测向量中有效信息较少。延长标定时间可增加量测信息,且惯导误差增大可以提升量测中惯导误差占比,所以锚泊条件仿真时延长标定时间至2800s。20组锚泊条件仿真中惯导误差标定后残差变化如图6~12所示,图中左侧为标定全程的估计残差变化,右侧为最后800 s的变化曲线,标定结果见表5。
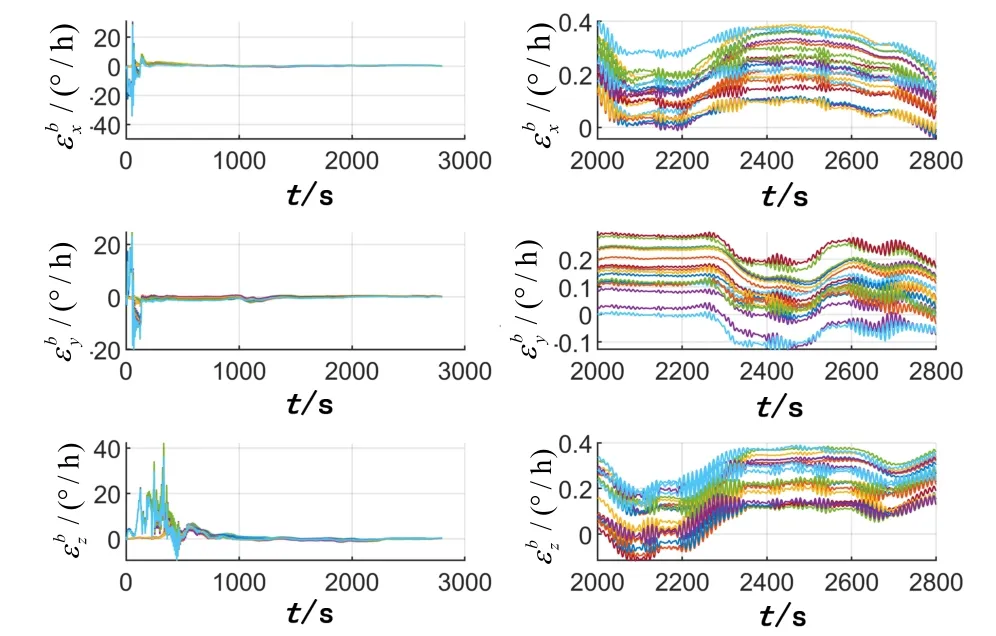
图6 系统级标定陀螺零偏误差Fig.6 Calibration result of gyroscope bias error

图7 系统级标定加速度计零偏误差Fig.7 Calibration result of accelerometer bias error
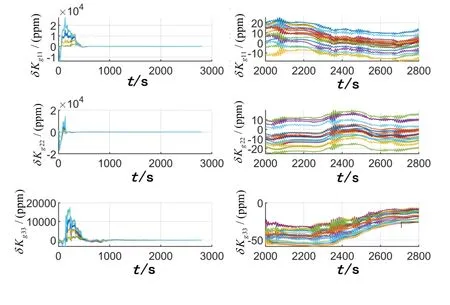
图8 系统级标定陀螺刻度系数误差Fig.8 Calibration result of gyroscope scale factor error

图9 系统级标定加速度计刻度系数误差Fig.9 Calibration result of accelerometer scale factor error

图10 系统级标定陀螺安装误差Fig.10 Calibration result of gyroscope misalignment error
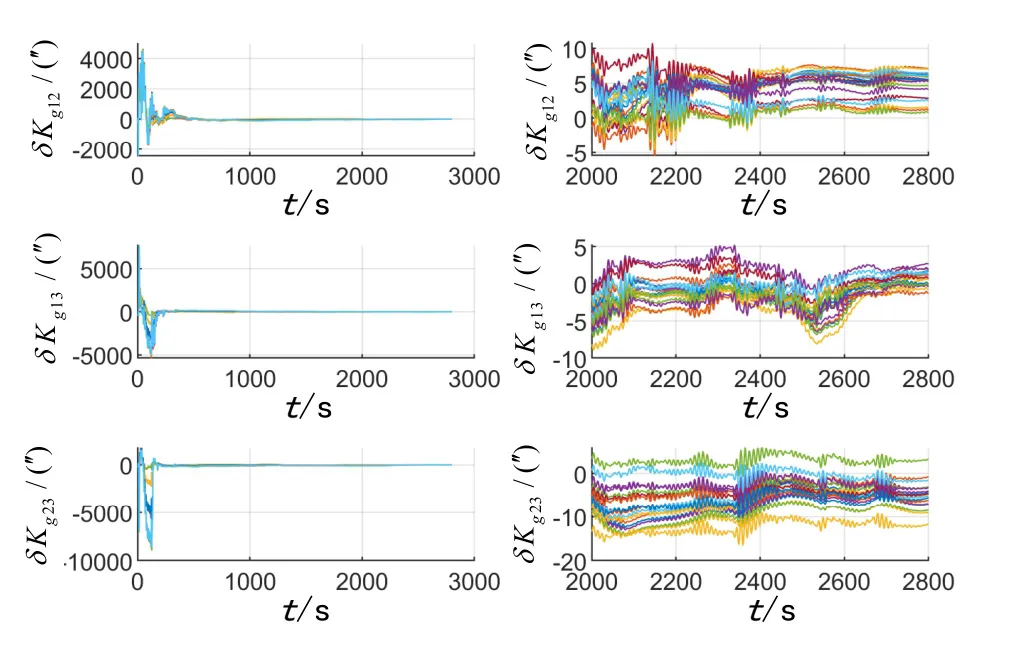
图11 系统级标定陀螺安装误差Fig.11 Calibration result of gyroscope misalignment error
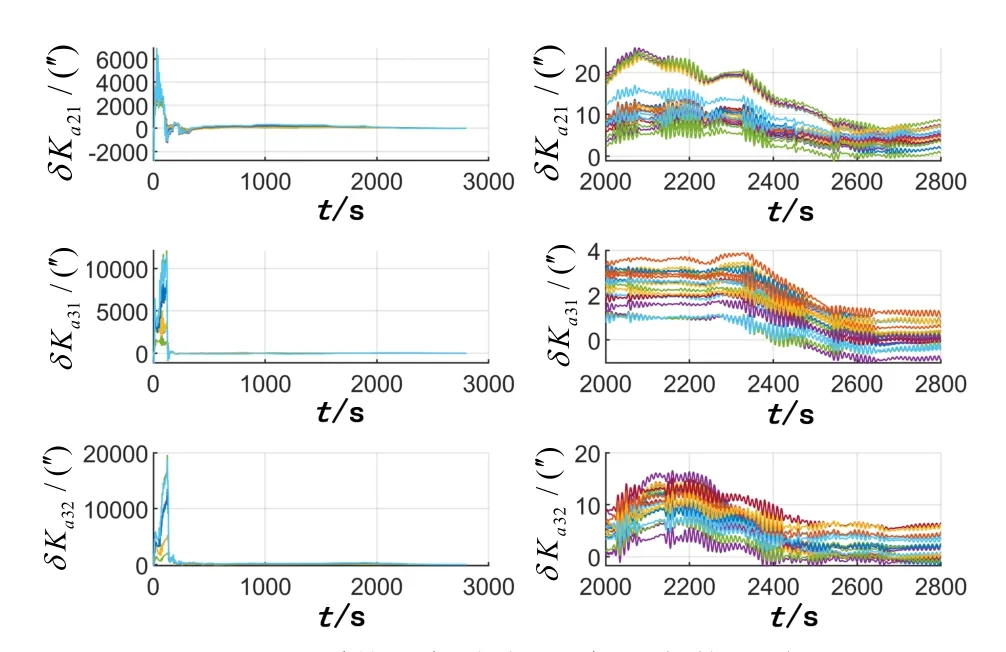
图12 系统级标定加速度计安装误差Fig.12 Calibration result of accelerometer misalignment error
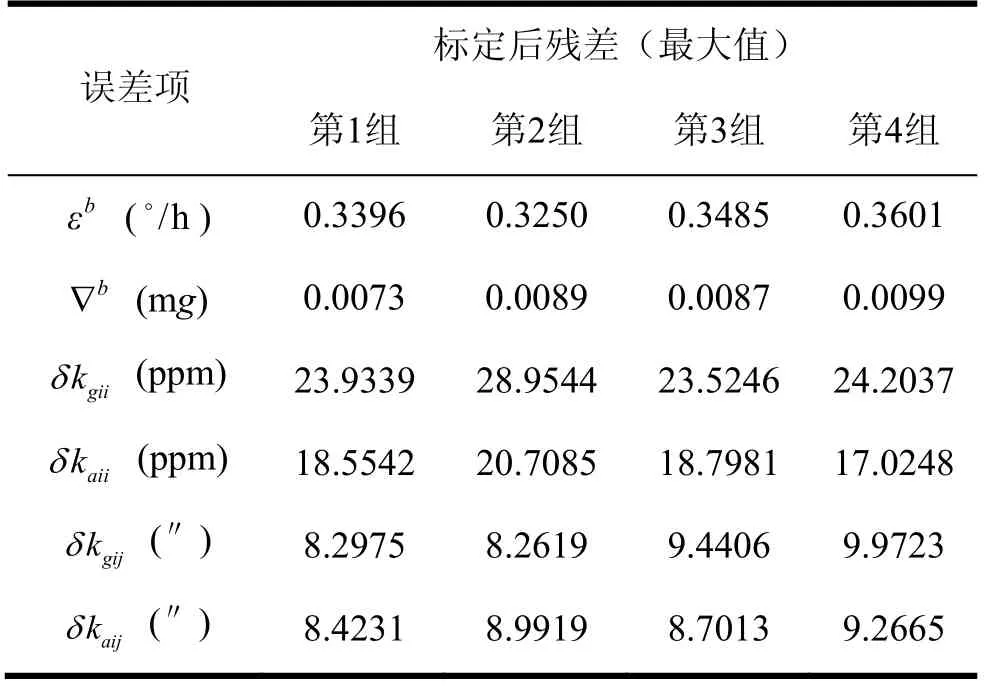
表5 锚泊条件系统级标定仿真结果Tab.5 Result of the system-level calibration under anchoring condition
从图6~12可以看出,在不同仿真条件下SIMU误差参数估计结果都是收敛的,虽然最后阶段受锚泊运动影响部分结果依然有波动,但是都稳定在小量范围内。根据表5中锚泊条件系统级标定结果可以得出结论:陀螺零偏标定结果较差,难以通过动基座系统级标定补偿SIMU陀螺零偏;加速度计零偏标定结果较准确,标定误差小于 1× 10-5g;刻度系数误差标定结果一般,陀螺刻度系数误差标定误差小于29.0 ppm,加速度计小于20.8 ppm;SIMU安装误差角标定比较准确,陀螺和加速度计安装误差角的标定误差分别小于10.0''和9.3''。
5 结 论
SIMU外场标定技术应用广泛,可以利用卡尔曼滤波估计SIMU误差参数,但外场标定大多都是在地面环境或舰船系泊状态下进行,现有标定方法尚不能进行舰船锚泊条件下SIMU外场标定。
本文分析舰船锚泊条件运动特点,提出一种锚泊条件下SIMU系统级标定方法。此方法可以在舰船锚泊条件下完成SIMU误差参数标定,补偿SIMU的加速度计零偏、陀螺和加速度计刻度系数误差以及陀螺和加速度计安装误差角。仿真结果表明,锚泊条件下系统级标定方法可以补偿SIMU中大部分误差,提升导航精度。锚泊条件系统级标定方法可以在舰船长时间出海期间,不依赖其他导航系统实现舰上SIMU系统级标定,提升SIMU导航精度,有一定的应用参考价值。
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
舰船科学技术(2022年10期)2022-06-17
中国惯性技术学报(2019年1期)2019-05-21
舰船科学技术(2018年8期)2018-09-02
北京航空航天大学学报(2018年1期)2018-04-20
中国惯性技术学报(2017年1期)2017-06-09
中国惯性技术学报(2017年1期)2017-06-09
探测与控制学报(2015年4期)2015-12-15
江苏船舶(2015年1期)2015-05-06
舰船科学技术(2015年10期)2015-03-12