星载降水测量雷达有源定标技术研究*
2020-06-10 00:20:20杨润峰江柏森张振华
遥测遥控 2020年1期
杨 卓,刘 昊,杨润峰,江柏森,张振华
星载降水测量雷达有源定标技术研究*
杨 卓,刘 昊,杨润峰,江柏森,张振华
(北京遥测技术研究所 北京 100094)
针对降水测量雷达的定标需求,提出基于四个有源雷达定标器的多站有源定标方法,给出定标器布设方式,并设计有源定标时序。分析定标过程中的误差源及其对定标精度的影响,仿真验证表明,四站有源定标的波束匹配偏差定标精度优于0.01°,系统定标精度优于1dB。方法在满足高精度定标的同时,能够实现在降水观测模式下对雷达性能的评估,降低天地定标试验的复杂度。
星载降水测量雷达;有源定标;有源雷达定标器;天线方向图;多站定标
引 言
星载降水测量雷达PR(Precipitation Radar)是主动式微波气象遥感仪器[1],与被动载荷相比,其能够发射微波脉冲,通过测量不同高度降水粒子的雷达反射率因子,获得降水的垂直廓线与三维结构,可实现对全球中低纬度地区全天时的降水测量。目前国外有两颗星载PR成功应用,分别是1997年美日联合发射的降水测量雷达(TRMM-PR)和2014年发射的双频降水测量雷达(GPM-DPR)[2]。中国也正在开展星载Ka/Ku双频降水测量雷达的研制工作[3]。
星载PR是定量遥感仪器,其自身参数的准确性与稳定性将直接关系到降水的测量精度[4]。雷达在长期在轨工作期间,系统参数可能会因为时钟漂移、仪器老化等原因发生变化,因此需要对雷达进行在轨定标,保障雷达对反射率因子的高精度测量。
针对星载PR在轨定标需求,国外的TRMM-PR和GPM-DPR两部雷达都采用有源定标技术[5-8],在地面利用一个有源雷达定标器ARC(Active Radar Calibrator)来测量雷达的天线方向图和系统参数。此时雷达需要在地面控制系统的指令下切换至特定的定标模式,无法获得正常的降水观测数据,且定标流程从前期准备到开展实施较为复杂。针对上述问题,本文提出了多站有源定标方法,利用多个ARC对雷达波束进行空间采样,获得雷达系统定标参数。该方法可以在保障定标精度的同时,实现雷达正常降水观测模式下的定标。
1 雷达定标需求分析
根据气象雷达工作原理[9],降水测量雷达回波功率P与降水粒子的等效雷达反射率因子Z的关系如式(1)所示。

令sys为雷达系统参数,它是只与雷达自身有关的参数,其定义为


另外,降水测量雷达是Ka/Ku双频有源相控阵雷达,降水观测时,要求波束在地面的足迹重叠,对雷达波束匹配精度要求较高;同时相控阵天线的发射与接收不是互易的,因此需要能够对雷达接收、发射、收发特性分别进行定标。
综上分析,星载降水测量雷达在轨定标的主要内容有:
① 对雷达天线的接收/发射特性定标,包括天线的波束指向、双频天线的波束匹配特性、波束宽度,测量雷达天线方向图,监测雷达天线旁瓣电平;
② 对雷达增益定标,包括雷达等效全向辐射功率、雷达接收增益、收发环路增益等。
2 有源定标技术
2.1 有源定标原理
雷达在轨定标主要有两种方法:无源定标和有源定标[10]。无源定标主要利用角反射器、定标球等无源设备来测量雷达的双程天线方向图及增益。有源雷达定标器是常用的有源定标设备之一,其自身参数已经经过精确标定[11-13],与无源定标设备相比,ARC的雷达散射截面大,可以降低对定标背景的要求;具有接收、发射、延时转发三种工作模式,定标功能全面;具备延时功能,可以对接收信号进行延时转发,消除地杂波的影响。因此,星载降水测量雷达采用有源定标技术,利用ARC对雷达特性进行全面定标。
为了减小大气衰减对定标精度的影响,定标选择在晴朗天气的条件下进行。以雷达接收特性定标为例,此时ARC工作在发射模式下。当卫星平台相对地面ARC过顶飞行时,ARC发射连续波信号,由于卫星平台的运动,雷达与ARC连线和雷达波束中心指向的夹角在沿轨方向不断地变化,雷达接收到不同的信号功率。由雷达接收功率P,可以获得不同沿轨角度下的雷达接收天线增益G

其中,t_ARC为ARC发射功率,t_ARC为ARC发射天线增益,G为接收天线增益,air为大气传播损耗。
根据雷达不同沿轨角度下天线增益的采样值,重建雷达沿轨天线方向图。用ARC进行雷达有源定标的示意图示于图1。
在对天线方向图进行测量时,由于降水测量雷达的波束较窄仅为0.7°,当地面只有一个ARC(即单站定标)时,受卫星平台的姿态控制误差、位置误差、波束指向误差等因素影响,雷达的天线波束轴在一次过顶飞行中可能无法扫过ARC,因此无法获得准确的天线增益值。

图1 用ARC进行雷达有源定标的示意图
基于上述问题,国外同类产品在雷达工作模式上特意设计雷达定标模式,该模式下雷达波束在跨轨方向进行扫描,扫描范围降低至2.66°,扫描步进由降水观测模式时的0.71°减小至0.177°。此时,由于雷达波束的扫描和卫星平台运动,以天线波束为参考基准,则地面ARC等效为在不同的时刻出现在雷达波束地面足迹内的不同位置,即对雷达波束在跨轨方向(波束扫描方向)和沿轨方向(卫星飞行方向)进行了0.177°×0.215°的二维空间采样,如图2所示。根据获得的波束增益采样值,重建雷达二维天线方向图。由此获得雷达沿轨天线方向图及接收增益最大值,实现对雷达接收特性的定标。
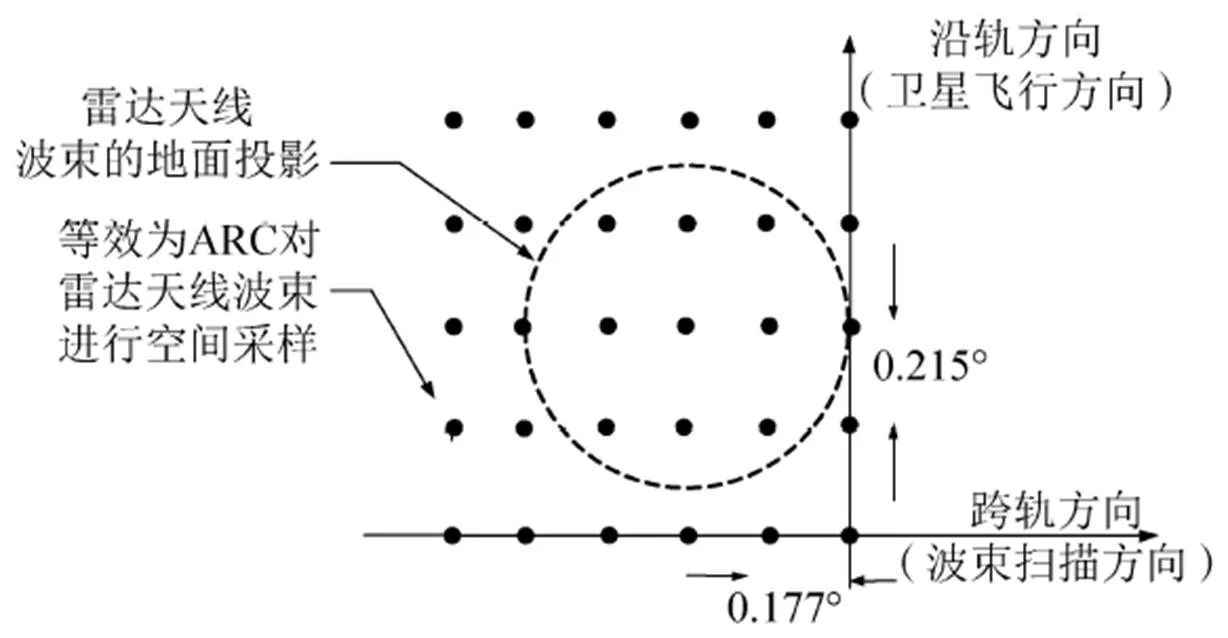
图2 ARC等效雷达波束二维空间采样示意图
为了完成雷达定标任务,首先需要进行天气预报,选择晴空天气,确定定标试验开展时间;其次需要进行轨道预测,计算定标试验时雷达与ARC之间的相对关系,确定天线波束扫描时的中心指向;最后通过地面站上注定标指令和必要的参数,开展定标试验。
2.2 多站定标技术
由上面分析可知,国外星载降水测量雷达定标时需要进入专门的定标模式,且雷达定标试验从准备到实施涉及的环节较多,控制链路较长。因此,希望通过地面定标仪器数量和位置布局的合理设计,在保证定标精度的前提下,降低定标流程的复杂性,使雷达能够在正常的观测模式下完成定标工作。
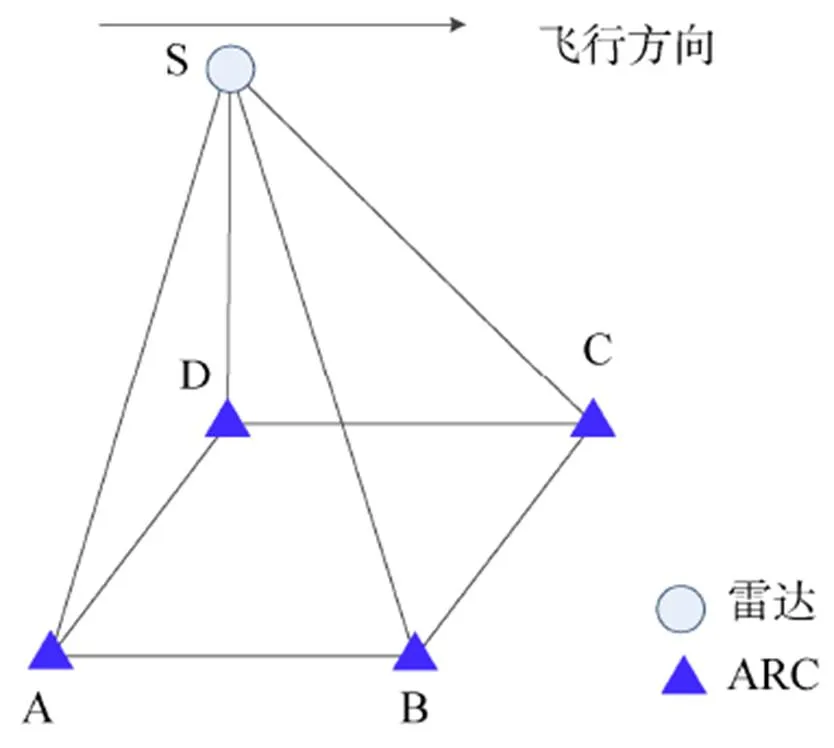
图3 地面ARC的布局
基于上述思想,在此提出了多站定标方法,即用多个ARC对雷达波束进行空间采样,在不改变雷达正常扫描步进的前提条件下来提高雷达天线的采样率。在地面放置四个ARC,布局如图3所示。图中S为卫星平台,ARC布设于正方形的A,B,C,D四个顶点处,其中AB边平行于卫星飞行方向,BC边平行于波束扫描方向(即跨轨方向),相邻两个ARC的间距为2.5km。
雷达在正常降水观测模式下,由于卫星轨道高度为407km,则相邻ARC与卫星平台的等效张角约为0.35°。此时雷达的波束扫描步进为0.7°,雷达波束在跨轨和沿轨方向的等效采样间隔可减小至0.35°×0.35°。采用多站定标时,地面只需根据雷达扫过ARC时刻的天气状况,确定该数据是否能用于定标,通过数据处理实现雷达定标。
雷达在多站定标时,多个ARC发射或转发的信号可能会同时到达降水测量雷达上或时间上有交叠,导致雷达无法区分出哪个信号来自于哪个ARC。针对该问题,可以通过发射信号的时序配合,使得在任意时刻,不会有2个ARC同时发射信号。
因此,为了使得降水测量雷达能够区分其所接收的信号是来自于地面哪个ARC,令所有的ARC都工作在统一的时间基准下(如GPS),采用时分的方式进行区别,即给每个ARC分配不同的时间片。四个ARC依次交替发射信号,雷达发射的脉冲地面ARC发射信号的时延关系如图4所示。
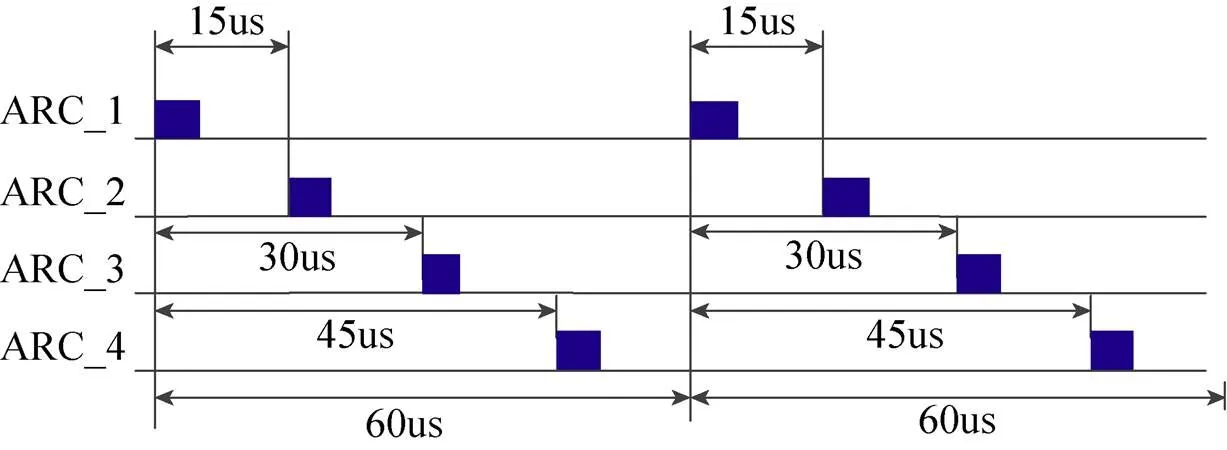
图4 地面四个ARC发射信号的时序关系
由上述内容可知,利用四个有源雷达定标器的多站定标,可以在晴天条件下,实现对降水测量雷达的定标。在雨天条件下,大气、云、降水等会造成雷达回波的衰减,因此可以利用ARC作为雷达散射截面积已知的标准目标,实现对雷达测量的积分路径衰减值PIA(Path-Integrated Attenuation)的监测。
当ARC工作在延时转发模式下时,ARC对接收到的雷达信号进行放大、延时并转发给雷达。通过选择晴朗时ARC的回波作为参考回波,同时比较降水时回波与参考回波之间的差异,可以计算出PIA。由于ARC的等效雷达散射截面积只与其发射天线增益、接收天线增益、放大增益等参数有关,因此雷达接收到的ARC的回波信号比较稳定。利用该方法可以对雷达降水观测时PIA算法的有效性进行评估与检验,为后继算法改进、提高降水反演精度提供依据。
2.3 天线模型参数估计
降水测量雷达天线波束为笔状波束,其天线的主瓣方向图可以近似为二维高斯函数[14]。天线方向图单位为dB,表达式如下:



3 有源定标精度分析
降水测量雷达有源定标精度受多项因素共同影响,由式(3)雷达接收参数的定标方程可知,雷达接收特性的绝对定标误差可表示为

因此,定标过程中的误差源主要分为三个部分,分别是雷达接收功率获取时的误差dP、地面有源雷达定标器自身的定标误差ARC、大气传输损耗带来的误差air:
① 雷达接收功率获取时的误差dP
② 地面有源雷达定标器自身的定标误差ARC
地面ARC自身的精度也会对定标产生影响;
③ 信号传播过程中,大气传输损耗带来的误差air
在信号传播过程中,大气损耗L会给雷达接收功率带来不确定性,影响雷达的定标精度。
GPM-DPR是目前唯一在轨运行的星载降水测量雷达,包含Ka降水测量雷达(KaPR)和Ku降水测量雷达(KuPR)这两部雷达。表1为GPM-DPR的基本参数[15]。
基于GPM-DPR的参数,综合考虑误差源的影响,对雷达四站有源定标进行仿真。仿真范围在跨轨方向±0.71°内,采用蒙特卡洛仿真1000次,引入的误差参数如表2所示。
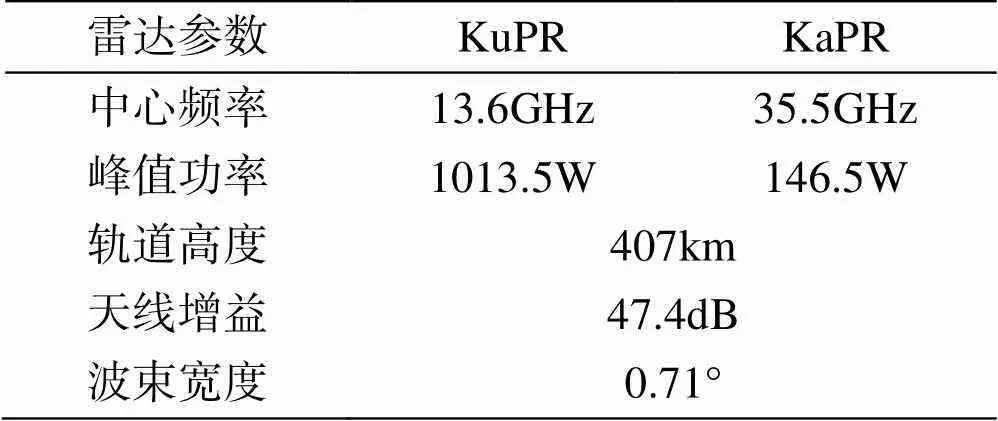
表1 GPM-DPR基本参数

表2 仿真中的误差参数
雷达接收天线方向图仿真结果如图5所示。其中,蓝色点为考虑误差源影响后,获得的雷达接收增益测量值;曲面为根据测量值拟合得到的雷达接收天线立体方向图。根据二维方向图,对雷达的波束指向、波束宽度、接收增益等进行定标。统计误差对四站定标结果的影响,如表3所示。
综合仿真结果可知,雷达接收功率的误差主要影响雷达波束指向、波束宽度的定标精度,ARC定标误差和大气损耗不确定度主要影响雷达绝对增益的定标精度。从表3可知,当采用四站有源定标时,沿轨波束指向定标误差约为0.005°,波束宽度定标误差为0.007°。假设Ka雷达和Ku雷达沿轨波束指向测量误差是独立的,则波束匹配偏差估计方差是二者的平方和,即波束匹配偏差定标精度为0.007°。Ku雷达增益定标精度约为0.40dB,Ka雷达约为0.46dB。
因此,星载降水测量雷达采用四站有源定标时,波束匹配偏差定标精度优于0.01°,系统定标精度优于1dB,能够满足雷达系统的高精度定标要求。
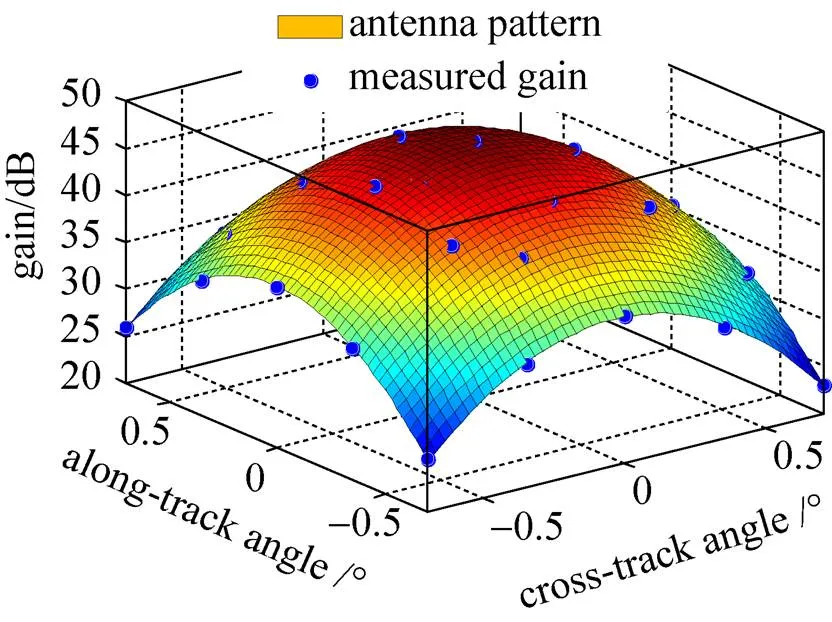
图5 雷达接收天线方向图仿真结果

表3 综合误差影响下的雷达四站定标结果
4 结 论
本文提出了一种星载降水测量雷达四站有源定标方法,可使雷达在降水观测模式下实现在轨定标及性能评估,而不需要进入专门的定标模式;同时该定标方法能够评估和检验雷达降水观测时积分路径衰减算法的有效性。本文设计了四个ARC的布设方式和发射信号时序,并通过详细建模和仿真分析验证了该方法的有效性。四站有源定标满足系统的定标精度要求,能够为星载降水测量雷达未来在轨应用提供支撑。
[1] 杨润峰, 张晓玲, 张振华, 等. 星载主动式微波气象遥感载荷技术现状与发展趋势[J]. 遥测遥控, 2017, 38(6): 17–22. YANG Runfeng, ZHANG Xiaoling, ZHANG Zhenhua, et al. Development status and trend of spaceborne active microwave meteorological remote sensing payload[J]. Telemetry Tracking and Command, 2017, 38(6): 17–22.
[2] 尹红刚. 星载降水测量雷达技术研究[D]. 北京: 中国科学院空间科学与应用研究中心, 2008. Yin Honggang. Study on spaceborne precipitation radar technology[D]. Beijing: Center for Space Science and Applied Research, Chinese Academy of Sciences, 2008.
[3] 尹红刚, 商建, 吴琼, 等. 风云三号降水测量雷达技术性能分析[J]. 气象科技, 2017,(5): 33–41,62. YIN Honggang, SHANG Jian, WU Qiong, et al. Technical performance analysis of fengyun-3 precipitation measurement radar [J]. Meteorological Science and Technology, 2017,(5): 33–41,62.
[4] IGUICHI T, SETO S, TAKAHASHI N, et al. Uncertainties in the rain retrieval algorithm for the GPM dual frequency precipitation radar[C]. 25th IEEE International Geoscience and Remote Sensing Symposium, 2005: 3384–3387.
[5] MASAKI T, KUBOTA T, OKI R. Current status of GPM/DPR level 1 algorithm development and DPR calibration[C]. IEEE Transactions onGeoscience and Remote Sensing Symposium, 2015: 2615–2618.
[6] HANADO H, NAKAGAWA K, KAWAMURA S, et al. Onboard calibration of the dual-frequency precipitation radar (DPR) installed on the global precipitation measurement (GPM) core observatory[C]. General Assembly & Scientific Symposium, 2014.
[7] HOU A Y, KAKAR R. K, NEECK S. The Global Precipitation Measurement Mission[J]. Bulletin of the American Meteoro logical Society, 2014, 95(5): 701–722.
[8] KOJIMA M, IGUCHI T. Dual-frequency precipitation radar (DPR) development on the global precipitation measurement (GPM) core observatory[J]. Cerebellum, 2012, 8528(3): 202–13.
[9] 张培昌, 杜秉玉, 戴铁王. 雷达气象学[M]. 北京: 气象出版社, 2000. ZHANG Peichang, DU Bingyu, DAI Tiewang. Radar Meteorology[M]. Beijing: China Meteorological Pess, 2000.
[10] ANTHONY FREEMAN. SAR Calibration: an Overview[J]. IEEE Transactions on Geoscience and Remote Sensing, 1992, 30(6): 1107–1119.
[11] LENZ R, SCHULER K, YOUNIS M. High accuracy digitally controlled active radar ground calibrator system for TerraSAR-X[C]. IEEE Transactions on International Radar Conference, 2005.
[12] KUMAGAI H, KOZU T, SATAKE M, et al. Development of an active radar calibrator for the TRMM precipitation radar[J]. IEEE Transactions on Geoscience AND Remote Sensing, 1995, 33(6): 1316–1318.
[13] KIMURA T. TRMM precipitation radar: calibration and data collection strategies[C]. International Geoscience & Remote Sensing Symposium, 1994.
[14] PIERRE S, FRANCOIS L, OLIVIER P. Use of gaussian beams to compute antenna pattern[J]. Annales Des Télécommu- nications, 2002, 57(7-8): 775–797.
[15] FURUKAWA K, KOJIMA M, MIURA T, et al. Satellite system test status of the Dual-Frequency Precipitation Radar on the global precipitation measurement core spacecraft[C]. IEEE Transactions on Geoscience & Remote Sensing Symposium, 2014.
Research on active calibration of spaceborne precipitation radar
YANG Zhuo, LIU Hao, YANG Runfeng, JIANG Bosen, ZHANG Zhenhua
(Beijing Research Institute of Telemetry, Beijing 100094, China)
In this paper, an active calibration method using four active radar calibrators is presentedbased on the calibration requirements of the precipitation radar. The layout of the active radar calibrators is given, and the timing of the active calibration is designed. The sources of errors in the calibration process and its influence on the calibration accuracy are analyzed. The simulation results show that the calibration accuracy of the radar beam matching is better than 0.01°, and the calibration accuracy is better than 1 dB. While satisfying high-precision calibration requirements, this method can evaluate the performance of the radar in the precipitation observation mode, and reduce the complexity of the calibration experiment.
Spaceborne precipitation radar; Active calibration; Active radar calibrator; Antenna pattern; Multi-station calibration
TN959.4
A
CN11-1780(2020)01-0012-07
Email:ycyk704@163.com
TEL:010-68382327 010-68382557
国家气象局“风云”三号卫星项目支持
2019-04-05
杨 卓 1993年生,硕士,主要研究方向为雷达信号处理。
刘 昊 1976年生,研究员,主要研究方向为天线设计。
杨润峰 1976年生,研究员,主要研究方向为雷达信号处理与系统设计。
江柏森 1982年生,研究员,主要研究方向为气象雷达系统总体设计。
张振华 1977年生,研究员,主要研究方向为雷达信号处理与系统设计。
猜你喜欢
今日农业(2021年19期)2022-01-12 06:17:00
空间科学学报(2020年1期)2021-01-14 00:53:20
通信技术(2019年3期)2019-05-31 03:19:08
通信电源技术(2018年3期)2018-06-26 08:05:48
电子测试(2018年6期)2018-05-09 07:31:54
声学与电子工程(2017年1期)2017-06-22 11:30:09
成都信息工程大学学报(2017年6期)2017-03-16 03:04:30
火控雷达技术(2016年3期)2016-02-06 02:30:40
中国光学(2015年5期)2015-12-09 09:00:46
广西文学(2015年9期)2015-10-24 03:53:14