基于协作反馈控制算法的车联网行车安全动态强化模型
2020-06-01 10:55曹建农王时绘
计算机应用 2020年4期
黄 辰 ,曹建农 ,王时绘 ,张 龑
(1. 湖北大学 计算机与信息工程学院,武汉 430062; 2. 香港理工大学 工程学院,香港)
(∗ 通信作者电子邮箱:szo094@qq. com)
0 引言
车联网(Internet of Vehicles,IoV)是物联网(Internet of Things,IoT)与智能交通系统(Intelligent Traffic System,ITS)的结合。美国交通部研究与创新技术管理局预测:到2030年,IoV 将减少全球90%的交通事故[1]。专用短距无线通信(Dedicated Short-Range Communication,DSRC)是IoV 的标准无线通信协议。IEEE802.11p 承载IoV 的物理层和数据链路层[2]。为支持行车安全应用,IoV 需要满足高密度、高动态、高实时性的要求[3]。IoV 的主要问题在于:大部分参与交通状态感知的社会车辆的行车轨迹是随机的,缺乏车间协作;车载感知设备只能覆盖视距范围,难以准确描述行车安全态势;交通拓扑变化频繁,导致车载感知设备的时空分布不均匀;如果网络直接扩散感知消息,会极大消耗通信资源[4];信道争用加剧消息碰撞,造成广播风暴和信息过载[5]。
在面向车辆协作通信的研究中,Zhang 等[6]将车载无线信道的接入控制问题转换为非协同博弈模型,避免其他大量车辆为接入信道而排队时间过长;Cao等[7]提出在车联网无线信号的覆盖范围内,分配合适的无线通信信道;Ciuonzo等[8]在云端建立数据融合中心,探测没有参与到协作过程的车辆;Zhu等[9]提出通过协作式中继算法将中间节点联通起来,扩展车联网的覆盖范围;Wang等[10]提出由相邻多车形成计算能力更强的车辆集合,在车辆集合之间进行移动计算负载的分担转移,更有利于聚合整个车联网的计算资源。上述研究中,有以下关键问题尚未完全解决:1)如何快速建立车辆协作关系,降低车载感知设备的时空分布不均匀对信息采集的影响;2)如何感知和描述行车安全态势,如何将直接观测数据转换为对行车安全态势的量化描述。
在交通信息采集和行驶数据分析的研究中,Pu 等[11]提出混合边缘计算框架,利用边缘计算获得路边设施的数据和计算支持;Ni 等[12]面向道路数据采集和通信设施的分布问题,构建了效用最大化模型;Sun 等[13]提出在道路交叉口动态形成临时的车辆集合,扩展车辆之间的通信距离;Li等[14]使用神经网络模型检测道路场景信息,在决策系统中控制车辆的行驶策略;Lin 等[15]设计了基于社会关系的车辆路径选择算法,用以决定最优路径,提高交通效率;Quan 等[16]在软件定义车联网中,聚合具备协同能力的车辆,实现车辆集合之间协同;Gao 等[17]基于行车安全信息广播的频率和周期性特征,对信道冲突进行预测。上述研究中,有以下关键问题尚未完全解决:1)在车队内部,如何通过协商得出一致性的感知结果,提高感知精度和感知范围,减少信息冗余;2)如何将信息融合的结果分发给相关车辆,优化驾驶行为和信息传输行为。
针对上述研究存在的问题,本文通过车间协作辅助驾驶控制,全面采集来自驾驶员、车辆、交通基础设施的信息,并在云端建立信息融合中心,处理分析原始感知数据,再依据信息融合的结果,为参与协作感知的车辆提供智能驾驶辅助控制支持。
基于上述思路,本文提出面向车联网行车安全的协作反馈控制(Cooperative Feedback Control,CFC)算法。CFC 建立了车辆间的动态协作关系,组建了具有稳定性的虚拟车队,扩展了车辆的感知视野,并利用交通信息的时空相关性,建立了优化及反馈控制模型,使虚拟车队能够自适应调整行车规划。在保证行车安全的前提下,利用车辆协同,CFC能优化消息传输,控制消息传播规模,降低无线信道资源的消耗。
1 系统整体模型
在IoV 中,车与车、车与人、车与基础设施之间频繁交换消息,如图1 所示。IoV 长时间承载高传输负载,容易导致传输时延、错误和冗余,影响行车的稳定性和安全性。
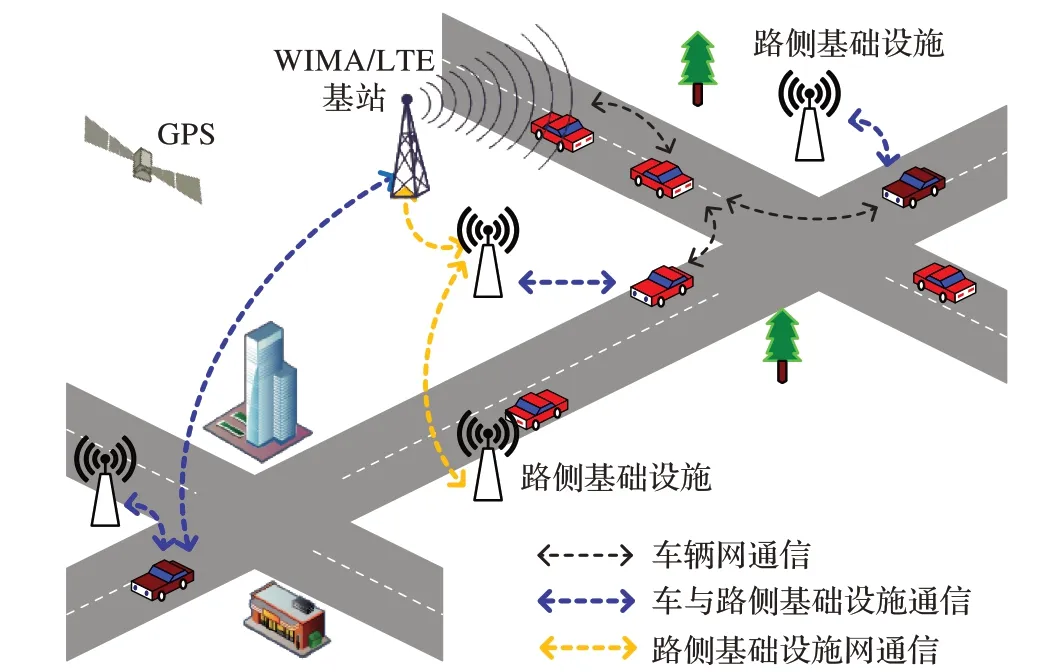
图1 系统模型Fig.1 System model
本文采用的基础行车轨迹数据集,来自美国的长途车辆轨迹采集计划计划[18]。该计划大规模采集并重建车辆轨迹数据和相应的道路环境信息,重建数据在保留原始数据变化趋势的同时衰减了噪声,并提供给研究人员分析驾驶行为。
2 虚拟车队协作组队模型
2.1 速度协同模型
速度协同模型的核心是面向分布式协作的平滑速度推荐算法。首先,计算虚拟车队的平均速度;然后,获得平滑推荐速度的初始值;最后,进行算法敏感度分析。
1)平均速度。
车辆在启动阶段,采样数量不足,无法进行周期性采样。平滑速度推荐算法采用服从指数分布的权重系数,对相邻车辆的平滑速度取均值,形成推荐速度。在基于离散时间的算法迭代过程中,实时推送推荐速度。推送推荐速度可以减小速度的波动,从而使车辆能够以虚拟编队的形式平稳行驶。
2)平滑推荐速度。
首先,设置车辆改变运动状态的平均周期,即速度波动周期τc;CDes是目标车辆;CFront是前车;vˉFront(t)是CFront的平均速度。然后,引入离散时间域上的指数分布函数f(αx)。最后,设定速度波动周期τc的权重分配因子之和为w,求解得到α的近似值。w 越大,模型对动态速度增量的变化越敏感,速度的平滑效果下降。α确定后可计算平滑推荐速度vˉDes(t):
3)敏感度分析。
图2为交通流量的波动图。从图2(a)可看出,由于参数α的取值不满足敏感度条件,在小扰动的作用下,车流将进入高敏感度状态,导致交通拥塞向车流的上游传播;从图2(b)可看出,在参数的取值满足敏感度条件的情况下,小扰动导致的车流波动现象将会完全消失,从而使得虚拟车队恢复到低敏感度状态。
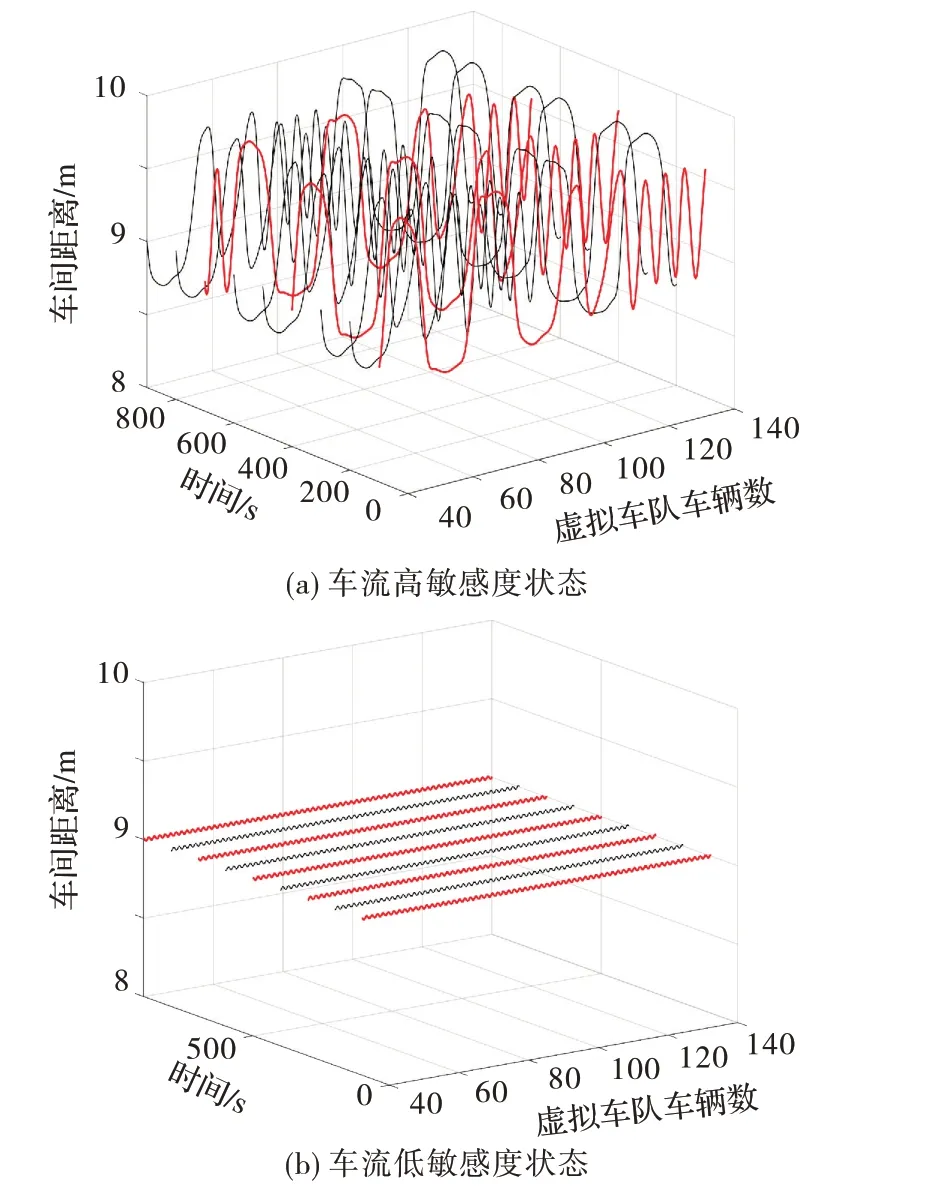
图2 车流敏感度Fig.2 Sensitivity of traffic flow
2.2 加速度协同模型
虚拟车队协作组队模型的目标是使得区域车辆的行车状态趋于一致。首先,根据期望加速度实时调节车辆的实际加速度,形成具备短期抗干扰性的虚拟车队;然后,根据外界的扰动情况,设置动态加速度增量,维护虚拟车队抗干扰性。
加速度协同模型,是在上述速度协同模型的基础上,结合期望速度信息,描述区域车流的抗干扰状态。目标车辆的加速度aDes(t)表示为:

其中:vˉ0为虚拟车队的平均速度;vmax为最高行驶速度;vˉDes(t)是目标车辆的平均速度。加速度协同模型分为三个部分:fα(⋅)为速度调节函数,fβ(⋅)为速度差调节函数,fλ(⋅)为平均速度调节函数。Sα为速度敏感度系数,Sβ为速度差敏感度系数,Sλ为平均速度敏感度系数。
在最近的k 个采样周期内,如果CDes追得上CFront,则ΔvDes(t) ≤0;如果始终未能追上CFront,则ΔvDes(t) >0。区域车辆集合通过车间协作,交换各自的加速度增量,保持虚拟车队的短期抗干扰性。同时,为了保证行车安全,需要实时检查vˉDes(t)是否超过了安全速度上限vsafe(t),得到期望速度。输出CDes期望速度v˜Des(t),进入下一轮迭代。
3 行车安全消息传输模型
消息协同传输模型从行车安全应用消息中提取消息参数,归类为安全效用消息,量化评估IoV 的行车安全状态,计算整体安全效用,为后续的信息融合打下基础。
1)行车安全分析。
消息协同传输模型首先计算关键的消息参数与vDes(t)、aDes(t)的影响度[19];然后,分析哪些消息参数是影响行车安全的关键因素;最后,将这些参数纳入安全效用计算框架。影响度绝对值越高,变量的影响程度越高。影响度表征两个变量的相关方向:当一个变量增加,另一个变量是增加的趋势,影响度为正;另一个变量是减少的趋势,影响度为负。当两个变量接近完全的单调相关时,影响度绝对值增加。
分别计算安全间距(参数1)、重传次数(参数2)、处理时延(参数3)、反应时间(参数4)、追踪精度(参数5)和潮湿程度(参数6)共6 类消息参数的影响度,以及相对概率分布。图3显示,参数1、参数3、参数5呈现显著的正影响度,并且影响度最大值的相对概率明显高于其他参数。
2)行车安全间距效用。
车辆安全间距Ddis是避免碰撞最重要的约束条件,受到初始速度、加速度等行车状态参数的影响。Ddis表示为:

其中:Dmin为最小停车间距;tR为驾驶员操作反应时间。为了判断驾驶倾向性,心理安全间距可表示为:
(2)止水片的安装必须将止水片预先敲打至贴合后再涂刷底胶后固定,止水片的两端埋入砼槽内,并妥善按照图示处理好细节,固定完毕后再其面上浇筑钢筋细石砼。

其中:kim⋅tR和kim⋅Dmin为不同驾驶倾向性对应的操作反应时间和最小停车间距。安全间距效用U(Ddis)可表示为:

其中:As为U(Ddis)幅度系数;α 是驾驶倾向性影响系数;ρr是随机数。
3)数据处理时延消息及效用。
消息传输时延表示车辆产生消息,到邻居车辆成功接收到消息所需的时间可表示为:

其中:M 是无线信道上传输的平均信息量;Rne为消息产生速率;Rtran为消息分发速率。数据处理时延效用U(Dses)在不同采样时间段,需要考虑信号发射功率的累加消耗成本。信号发射功率越大,分配的时隙数量越多,数据处理时延效用的累加消耗成本就越大。U(Dses)可表示为:

其中:wi是特定时延类型的信号发射功率;Wmin是系统所能提供的最小功率;xi是特定时延类型的实际分配时隙数量;Xi是特定时延类型请求的时延数量;αi是特定时延类型的比例调节因子。
4)车辆追踪精度消息。

其中:Ao(t)和vo(t)分别为消息发送车辆的实际位置和速度。车辆追踪精度需求和IoV 网络性能的关系,可以作为消息发射功率控制的参考模型。
5)安全效用消息协同传输。
安全效用消息传输受到Rtran(t)的影响,与Rtran(t)邻居节点数量、消息生成速率和车流密度等因素相关,可表示为:

其中:Rne(t)是数据链路层的消息生成速率。调节Rtran(t)的上限和下限,可以优化安全效用消息的协同传输效率。
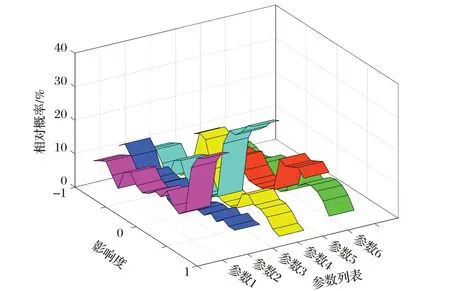
图3 影响度的概率分布Fig.3 Probability distribution of impact degree
4 双层联合优化模型
双层联合优化模型同时对消息传输控制和车辆驾驶控制进行优化。云端的数据融合中心引入面向多源异构信息的稀疏表示框架,在虚拟车队的内部更新优化结果。
1)相对安全效用。
相对安全效用模型是在信道容量有限的情况下,保障安全效用消息的传输可靠性。考虑车辆的相对安全关系,相对安全效用模型与安全间距效用U(Ddis)、数据处理时延效用U(Dses)、追踪精度效用U(Es)相关联。依据网络效用最大化理论[20],定义相邻车辆之间的相对安全效用函数Uair(S)为:

2)碰撞损伤预测。
碰撞损伤预测模型是车辆驾驶策略的核心,通过合理利用安全间距,优化车流密度以及制动速度,降低碰撞风险,目标是确保潜在的碰撞损伤最小化。相对碰撞损伤密度是能够量化潜在的碰撞损失程度的指标。定义车辆组合的相对碰撞损伤密度Kair(t),可表示为:

其中:mi是虚拟车队第i 辆车的质量。车辆变道会引起车流密度ρ(x,t)变化,Kair(t) 也会变化。
3)双层联合优化模型。
通过实现相对安全效用的最大化,获得数据链路层的最优消息分发速率Rtran,并获得最优消息生成速率。设置ΔR 是应用层的消息生成速率和数据链路层的消息分发速率的差值。如果ΔR >0,则消息发送队列溢出,丢包率上升。可以调整数据缓冲区的消息发送队列长度,确保没有队列溢出,降低通信延迟。双层联合优化模型的下层是面向碰撞损伤预测的物理控制层,上层是面向相对安全效用的信息传输层,两层拥有独立的数学模型和决策变量。双层联合优化模型需要取得相对安全效用的最大值max Uall(S),以及碰撞损失的最小值min Sall(t)。将下层的目标函数作为上层目标函数的自变量,最终决策结果以上层目标为主。
相对安全效用目标函数的上层模型可表示为:
其中:CLink(air)是车辆的链路信道容量。碰撞损伤预测目标函数下层模型可表示为:
其中:ai,min和ai,max分别为虚拟车队最小和最大加速度。
4)多源消息的融合算法。
本文引入动态贝叶斯框架,将位置跟踪感知看作概率密度分布的迭代更新。图4 为核密度估计目标车辆位置的概率密度分布。目标车辆状态后验概率密度函数的步骤如下:
Step1 时刻t - 1,粒子{Wn(t - 1),Yn(t - 1)}表示感知车辆Yn的置信度。
Step2 时刻t,基于感知车辆Yn在t - 1时刻的粒子,得到感知车辆Yn传向目标车辆X的消息。
Step3 时刻t,抽取Np个粒子,给每个粒子赋予权重值。更新目标车辆X的置信度粒子权重W(t),归一化得到W′(t)。
Step4 利用最小均方位置误差,对目标车辆和感知车辆的置信度粒子进行信息融合。
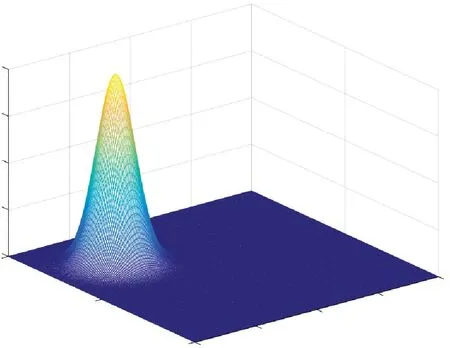
图4 目标车辆位置的概率密度分布Fig.4 Probability density distribution of target vehicle position
5 自适应反馈控制模型
虚拟车队自适应反馈控制模型预测车流密度的时空状态变化趋势,将经过优化的消息分发策略反馈给车载通信系统,并将车辆驾驶策略反馈给驾驶控制系统。自适应反馈控制模型修正消息传输行为和车辆驾驶行为,实时调整行车规划,辅助驾驶控制系统适应复杂多变的交通环境。
车流密度时变性要求根据车流密度自适应调整消息发射功率,避免信道拥塞。多车行驶的场景下,区域车辆密度并不均衡,会影响车辆追踪精度。建立车辆密度与平均速度的关系,分析车流密度的动态演变特征。建立车辆行驶状态的离散时间表达式,可表示为:



Step2 将消息接收车辆的真实速度(加速度)状态信息Sreal(t),与SI(t)比较,得到偏差值;
Step3 基于Sreal(t)和SI(t)的偏差值产生实时控制序列,使Sreal(t)趋近SI(t);
Step4 基于拉普拉斯变换以及反馈器在各个环节的传递函数,建立反馈器的系统模型。
6 仿真与结果分析
在仿真中,首先选定符合稳定行驶特征的评估数据集;然后,针对拥塞的交通环境,对比采用了协同机制和没有采用协同机制的两种驾驶策略对于车流波动平滑能力的影响,分析不同策略下的行车安全程度;最后,分析不同的消息传输范围以及传输时间间隔对于消息接收成功率的影响。
1)实验评估数据集。
统计一段时间内的速度[18],得到如图5 所示的相对概率分布的直方图。数值的分布范围较大,近似于正态分布,满足仿真需求:车辆行驶过程中的急加速和急减速比较少;大部分车辆的行驶状态稳定,有助于本文研究正常的驾驶行为。本文选取该车道行车轨迹数据集作为仿真研究对象。
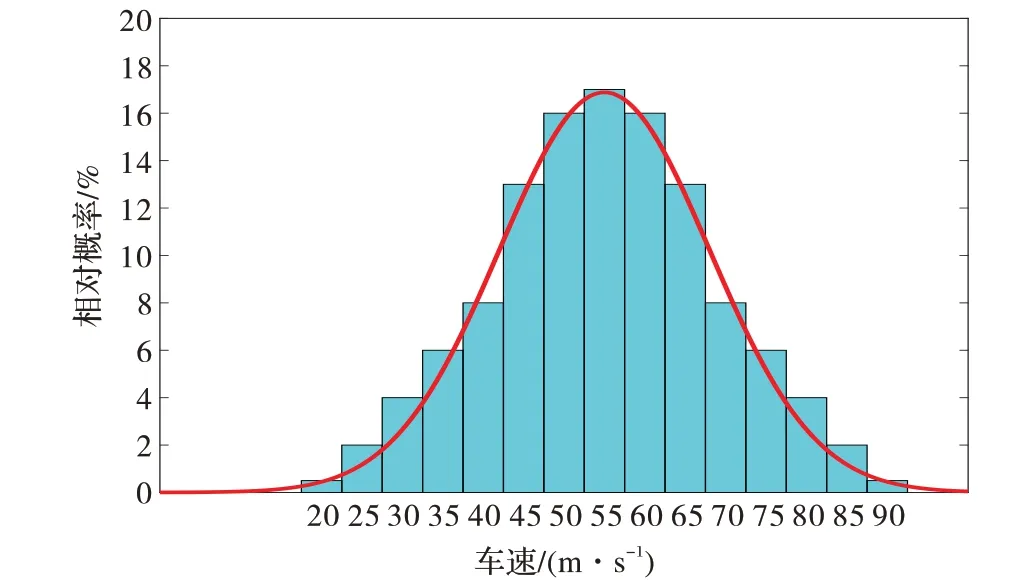
图5 车速概率分布Fig.5 Probability distribution of speed
2)车流波动平滑能力(行车安全程度)。
降低车流的波动性,减少追尾风险,提升行车安全程度,需要速度(加速度)不发生持续、剧烈的突变。本文检验CFC对车辆制动以及平滑驾驶的影响。从图6 所示的虚拟车队相邻车辆的加速度和速度曲线可看出:相对于无协同的普通车辆驾驶策略,本文提出的基于协同方式的驾驶策略充分考虑到车速和加速度的协同,使得虚拟车队内部的速度和加速度的波动范围明显收窄了,车辆驾驶不会再出现紧急制动的情况。
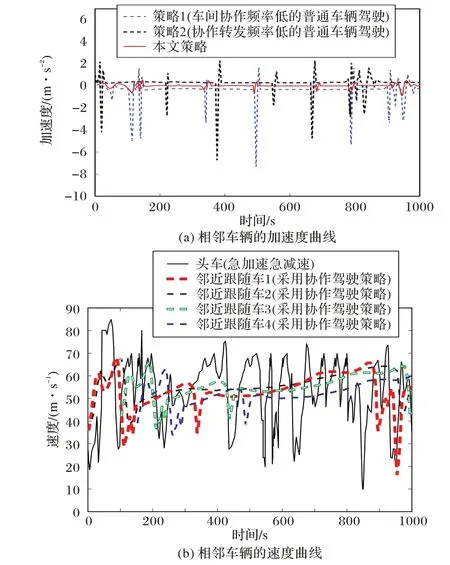
图6 加速度和速度曲线Fig.6 Acceleration and velocity curves
3)消息成功接收概率。
在IoV 通信环境中,数据丢包导致交通状态信息传输的错误和时延,影响行车安全的感知精度。消息接收成功率与消息传输范围以及传输时间间隔相关。经过双层联合优化模型优化过的消息传输策略,能够根据车辆间距的大小动态调整数据包重传次数。图7 为优化前后的消息传输接收成功率的对比。从图7 可看出:优化传输策略可以将消息接收成功率提高至90%以上,达到预期效果;而传统传输策略的消息接收成功率普遍低于90%。
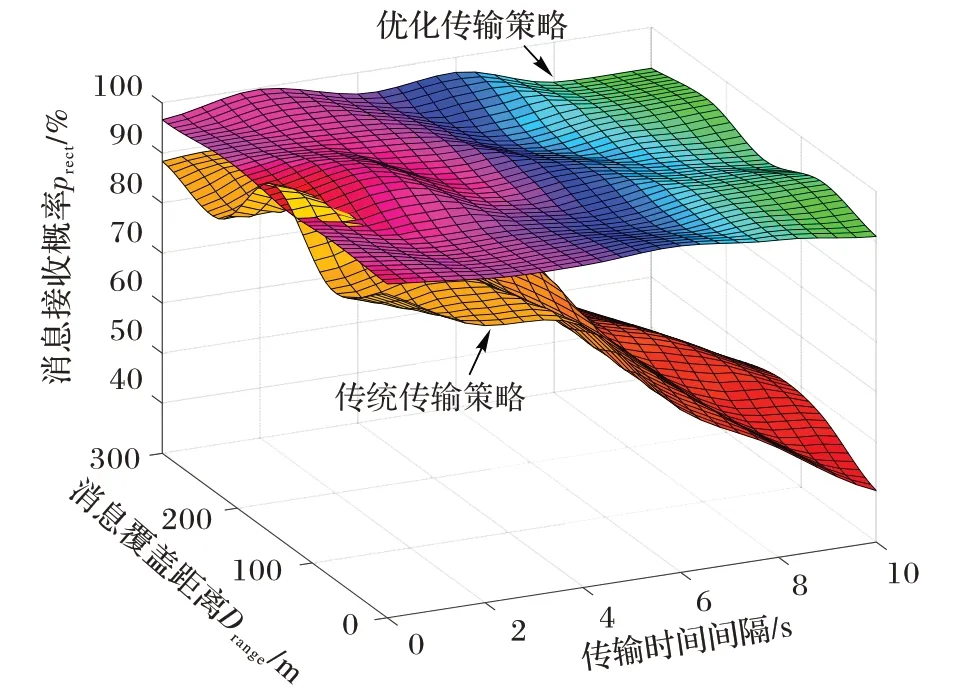
图7 优化前后的消息传输接收成功率的对比Fig. 7 Comparison of receiving success rate of information transmission before and after optimization
7 结语
本文提出基于协作反馈控制算法的行车安全动态强化模型CFC。在CFC的基础上,我们设计了协作感知算法,实时调节车辆的速度(加速度),使车辆行车状态趋于一致,从而形成具备抗车流扰动的虚拟车队。虚拟车队通过自适应反馈控制,将经过优化的消息分发策略反馈给车载通信系统,并将车辆驾驶策略反馈给驾驶控制系统,实时调整行车规划。仿真结果说明,CFC 在保障行车安全、提升传输性能上均有良好表现。
猜你喜欢
建材发展导向(2021年7期)2021-07-16
科学家(2021年24期)2021-04-25
科学家(2021年24期)2021-04-25
中国药学药品知识仓库(2021年18期)2021-02-28
大众投资指南(2021年35期)2021-02-16
江苏广播电视报·少儿文学(2019年10期)2019-09-10
扬子江(2019年3期)2019-05-24
辽河(2019年2期)2019-03-22
冰雪运动(2018年3期)2018-12-29
数学教学通讯·初中版(2015年5期)2015-06-17