
轴频电场与静电场一体化腐蚀相关电场隐身方法研究
2020-05-20 01:24:32孙强姜润翔喻鹏程锦房
兵工学报 2020年4期
孙强, 姜润翔, 喻鹏, 程锦房
(1.海军工程大学 兵器工程学院, 湖北 武汉 430033; 2.海军工程大学 电气工程学院, 湖北 武汉 430033)
0 引言
中、大型舰艇船体一般由低合金钢或铝合金材料制造,螺旋桨推进器则由铜合金制造。异种金属组成的舰船在海水电解质中存在电连接,将构成原电池,从而在海水中产生腐蚀相关电场信号。腐蚀电场根据其频率划分,可分为静电场、轴频电场和工频及其倍频电场[1-2]。其中,静电场和轴频电场因量级相对较大、特征明显等特点被作为信号源,广泛应用于水中兵器的探测系统中,如意大利ASTERIA水雷、西班牙MINEA水雷等均安装有电场引信[3-4]。
为了防止被安装有电场引信的水雷打击,各国通常将电场抑制技术运用在船舶设计和制造中[5-7]。如分别基于电流补偿方法和主动轴接地(ASG)技术[8]降低静电场和轴频电场信号。本文在深入研究电流补偿方法和ASG技术的基础上,提出了轴频与静电场(简称轴静)一体化控制方法,该方法将ASG系统的补偿电流值作为轴电流值,并将电流补偿方法中的补偿电流与轴电流的比值作为静电场补偿的控制量。
1 静电场电流补偿技术
补偿技术的基本原理在于降低舰船静电场的等效电偶极矩。自然腐蚀状态下,船体与螺旋桨构成的等效电偶极子如图1所示。由图1可见,阳极(船壳)的等效电荷中心位于船体中后部,阴极(螺旋桨)的等效电荷中心位于螺旋桨处,形成的电偶极矩为Q0=I0L0,其中I0为自然腐蚀电流,L0为电荷间距[9-10]。对于一艘长度L为上百米的中型舰船,L0为L/3~L/2,因此自然腐蚀电流产生的等效偶极矩通常较大。
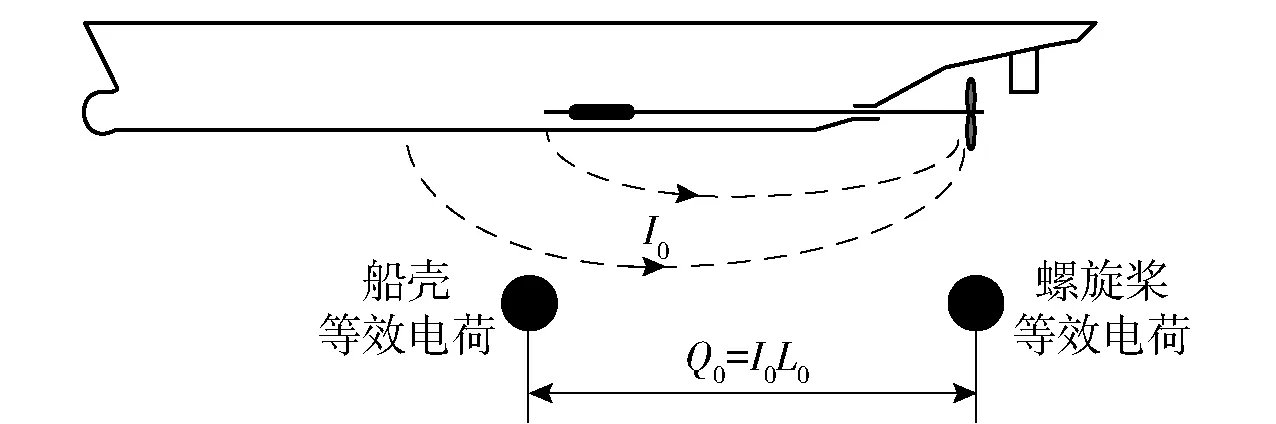
图1 自然腐蚀状态船体等效电偶极子模型Fig.1 Equivelent electric dipole in natural corrosion state
若在靠近螺旋桨位置处增加补偿阳极,则可使其输出的电流与自然腐蚀产生的电流方向相反。当补偿电流使船体电位趋于自平衡电位附近时,船壳表面的腐蚀电流值I0→0 A,此时大部分补偿电流通过螺旋桨返回船体,若该电流值为I1,螺旋桨与补偿阳极之间的距离为L1,则等效电偶极矩Q1=I1L1. 在一般情况下I1是I0的数倍,但是L1≪L0,从而导致Q1明显小于自然腐蚀状态的Q0值,从而达到了降低静电场的目的。补偿状态下的等效电偶极子模型如图2所示。
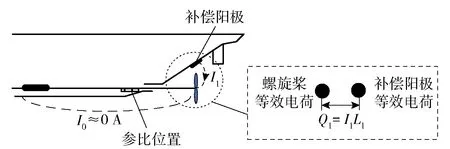
图2 补偿状态下等效电偶极子模型Fig.2 Equivelent electric dipole in current compensation state
在实现外加电流补偿技术时,一种合适的方法是基于补偿电流与轴电流的比值κ作为控制参量。仿真计算结果表明,当0.82≤κ≤1.18时,可实现对舰船静电场的有效抑制[11-12]。一艘中型舰船仿真计算得到κ与水下电场峰- 峰值的关系如图3所示,其中横坐标为补偿电流I. 由图3可知,随着补偿电流的增加,水下电场的峰- 峰值Up-p先减小、后增加,Up-p最小时对应的κ值处于1.0附近,为采用电流补偿技术实现电场隐身奠定了基础。
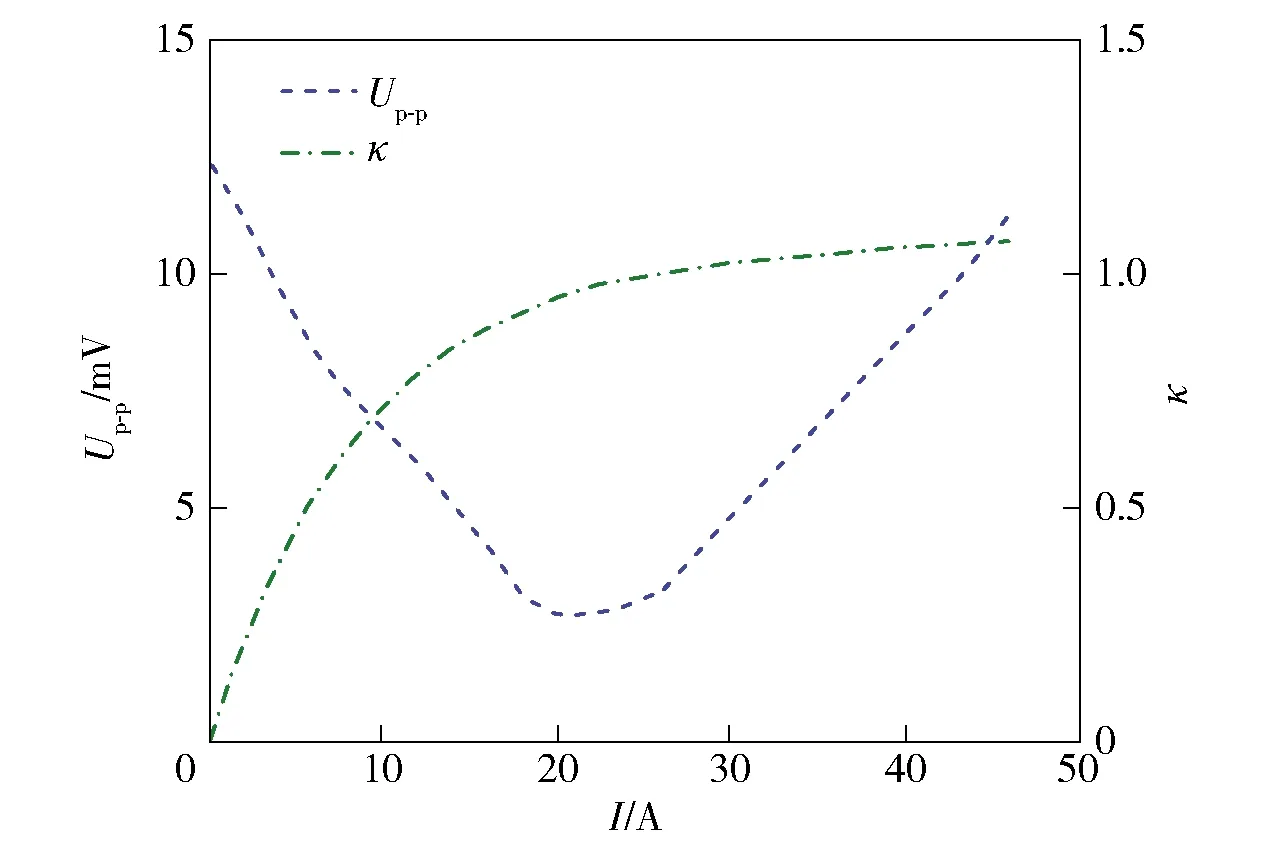
图3 κ与水下电场峰- 峰值的关系曲线Fig.3 Relationship between κ and peak-peak value of electric field
2 ASG技术
在电化学腐蚀和防腐过程中,无论是腐蚀电流还是保护电流,都将从阳极(分别对应船壳和辅助阳极或牺牲阳极)通过海水流向阴极(螺旋桨),再经过尾轴、轴承、联轴器、齿轮等接地结构返回到船壳,形成回路。一艘舰船的尾部结构如图4所示,其中R1、R2、R3、R4分别表示后轴承、前轴承、轴接地装置和推力轴承处的轴地电阻。
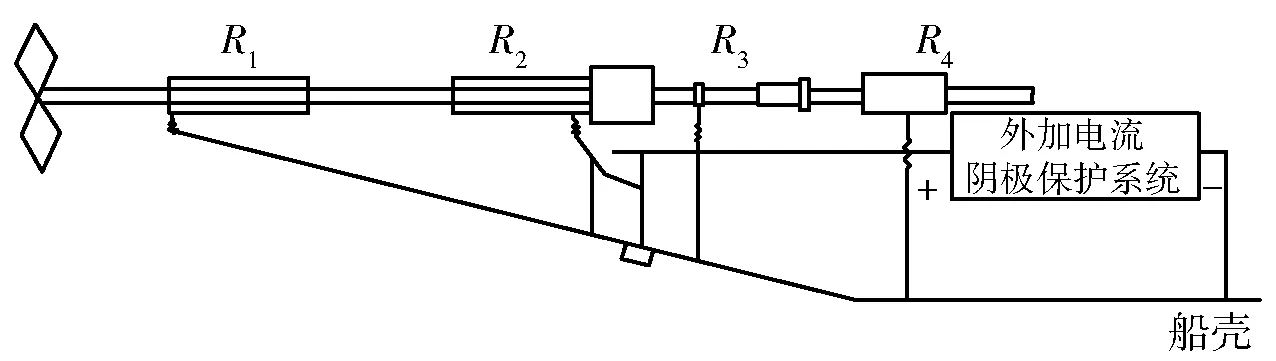
图4 一艘舰船的尾部结构Fig.4 Structure of stern
由图4可知,腐蚀和防腐电流经过尾轴时可以通过多条路径返回船壳,若忽略大轴电阻,则船体内部的轴- 地等效电阻Rb可视为由多个电阻并联的结果,如图4中的轴- 地等效电阻Rb可表示为
(1)
轴频电场主要是因轴转动过程中Rb的波动而产生,研究表明:若减小轴和地之间的电位差,则可有效抑制轴频电场信号[13-14],即在船体内部安装ASG系统,使轴地等效电阻降低为0 Ω(实际系统可保证等效电阻为20 μΩ),此时轴电流将从低电阻路径的ASG系统返回船壳,ASG系统的输出电流即近似为轴电流。2016年3月在湛江海域,对一艘中型船舶A在不同航速航行时的轴电流和ASG系统的输出电流进行监测,系统采样频率为100 Hz,低通滤波器截止频率为5 Hz,其中,轴电流的监测装置采用无接触电流传感器(见图5)。该船舶不同航速条件下的ASG输出电流与轴电流均值如表1所示,其中参比电极的保护电位均为-0.8 V.
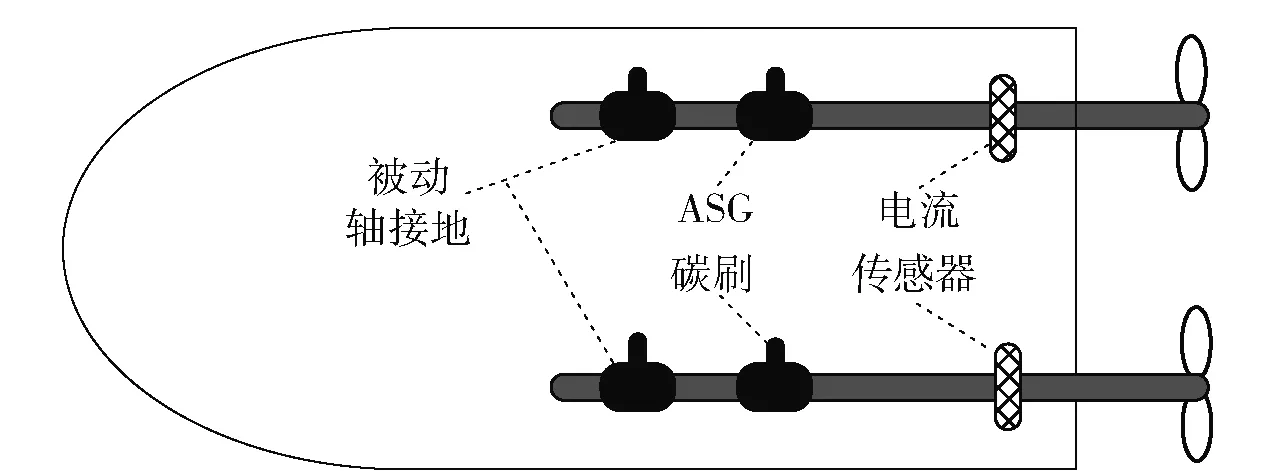
图5 电流传感器安装示意图Fig.5 Schematic diagram of current sensor installation
航速为5.8 kn、参比电位为0.8 V时,左舷及右舷的轴电流及ASG输出电流如图6所示(ASG系统工作时刻为40.2 s)。由图6可知,在ASG系统工作后:左舷、右舷的轴电流交流波动成分明显减小,直流信号幅度有明显增大;测量得到的轴电流有下降趋势,这是因为ASG系统开启后一段时间内阴极保护系统的极化过程引起的;ASG系统输出的电流值与电流传感器的测量值差别相对较小,且变化趋势一致(电流传感器安装在轴上,测轴电流)。综合表1和图6的试验结果可知,ASG系统输出电流与轴电流具有较好的一致性,仅静态电流存在部分偏差,相对误差约5%左右,应为ASG系统输出电流的测量误差。
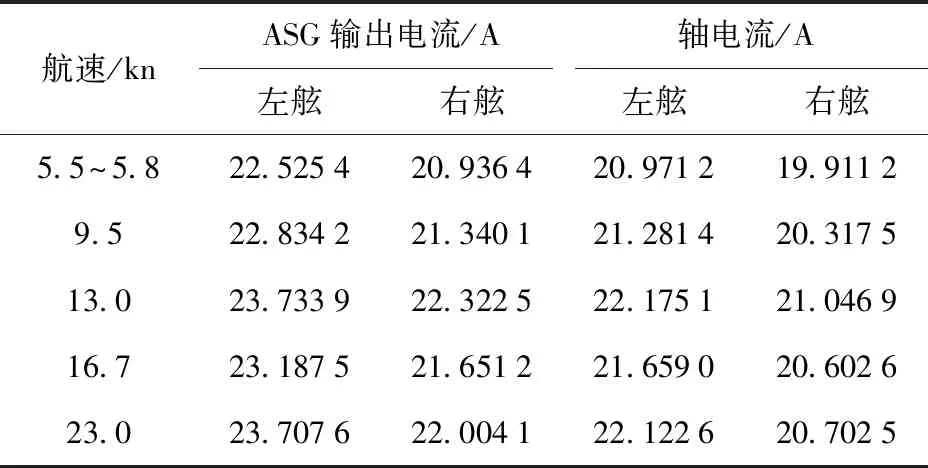
表1 不同状态下ASG输出电流与电流传感器 测量值Tab.1 Output currents of ASG and measured currents of sensor in different states
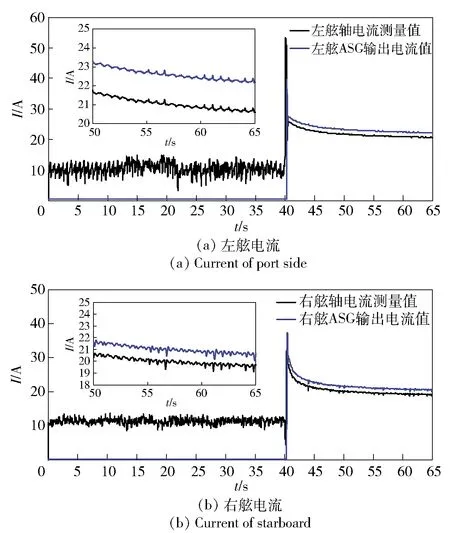
图6 航速5.5~5.8 kn时的轴电流与ASG输出电流Fig.6 Shaft current and ASG output at 5.5-5.8 kn
3 轴静一体化控制方法
3.1 电流补偿技术对轴频电场的影响
采用外加电流补偿技术后,相对于自然腐蚀状态,轴电流将增加。由轴频电场产生机理可知,在相同波动条件下,轴频电场信号强度因轴电流的增加将增大。不同补偿电流时船舶A的轴电流如表2所示。其中,试验时在船体尾部安装了补偿阳极,并利用图5所示无接触电流传感器对不同补偿电流时的轴电流进行监测,螺旋桨保持静止状态。
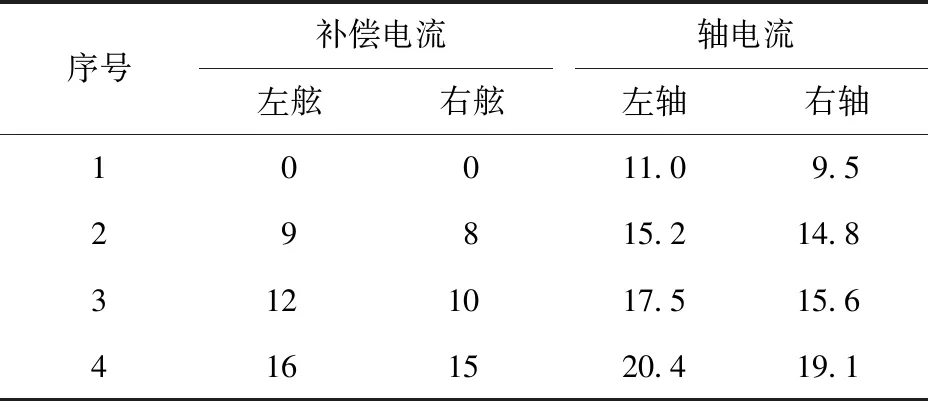
表2 某中型船舶不同外加补偿电流时的轴电流Tab.2 Shaft current of a middle sized ship under different compensation currents A
由表2可发现,随着补偿电流的增加,轴电流信号明显增加,补偿电流引起的轴电流增加量约占补偿电流的50%左右。一艘缩比舰船模型静电场隐身前后的静电场及轴频电场信号包络的峰- 峰值如表3所示,其中Ex、Ey、Ez分别表示沿x轴、y轴、z轴(垂直)方向上的电场。由表3可知,当采用外加电流补偿时,轴频电场信号的包络峰- 峰值明显增加,Ex包络的峰- 峰值增大了1.5倍。综合上述分析可知,采用电流补偿技术降低静电场信号时,将导致轴电流与轴频电场信号的强度增加。
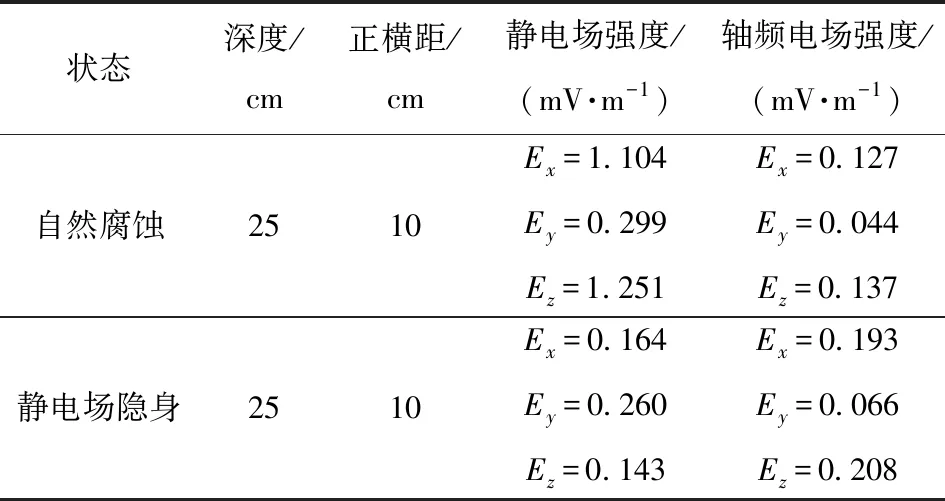
表3 一缩比模型静电场隐身前后的静电场及轴频 电场信号包络的峰- 峰值Tab.3 Envelope values of static and shaft-rate electric fields of a scaled ship model in static electric field stealthy state
3.2 ASG系统对静电场的影响
以船壳→海水→螺旋桨→轴接地→船壳构成的电化学系统回路为例,回路的等效电路如图7所示。图7中:φa为阳极电位;φc为阴极电位;Z1表示上虚线框内的等效阻抗,即由面积为S1的船体在海水中的泄漏电阻Rs1、船体涂层阻抗(涂层电阻Rc1和涂层容抗1/ωCc1)和船体极化阻抗(极化电阻Rp1和界面双电层容抗1/ωCd1)组成;Z2表示下虚线框内的等效阻抗,即由面积为S2的螺旋桨在海水中的泄漏电阻Rs2和螺旋桨极化阻抗(极化电阻Rp2和界面双电层容抗1/ωCd2)组成;Rb为船体内部回路轴地等效电阻。
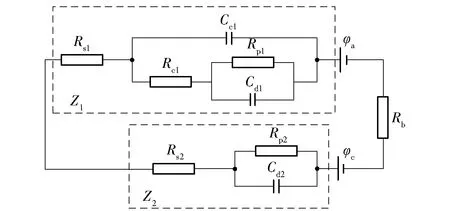
图7 轴频电场产生的等效电路Fig.7 Equivelent circuit diagram of shaft-rate electric field
在电导率为σ的海水中,系统中的回路阻抗为
Z=Z1+Z2+Rb.
(2)
由图7可得船壳→海水→螺旋桨→船壳回路中的电流为
(3)
在ASG系统工作前后,海水中的稳态电流Iw由Ew/(Rb+Rw)变化为Ew/Rw,其中Ew为腐蚀回路的稳态电势差,Rw为腐蚀回路中除轴地等效电阻Rb以外的稳态电阻。由此可知,当Rb的值较大时,ASG系统工作后,将导致海水中电流Iw增大,即螺旋桨电流增大,由于静电场信号的主要源为螺旋桨,静电场信号也将增大。通常情况下,实船的回路总电阻(Rb+Rw)为几百毫欧~几欧姆,被动轴接地电阻不足20 mΩ,因此当采用ASG系统后,将被动轴接地系统的电阻将等效为0 Ω时,对回路的总电阻影响不大,即回路中的电流变化不大,进而静电场变化不大[15]。但当被动轴接地系统碳刷和滑环电阻值Rb较大时,ASG系统工作后,将导致轴电流的明显增大,从而导致静电场增大。一艘中型船舶ASG系统开启前后的静电场信号如图8所示。
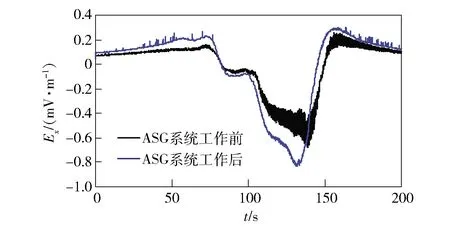
图8 一艘中型船舶ASG系统工作前后水下电场Ex信号Fig.8 Ex of a middle sized ship in ASG state
3.3 一体化控制方案
由3.1节和3.2节分析可知,电流补偿的静电场与ASG技术的轴频电场隐身方法分别对轴频电场和静电场有影响。同时,由第1节分析可知,在实施外加电流补偿时,可采用补偿电流与轴电流的比值κ作为控制参量,而由第2节分析可知,ASG系统的输出电流即为轴电流信号。因此,为了有效降低静电场与轴频电场信号,应实施综合控制。为此,本文在第1和第2节的基础上,提出轴静一体化控制方法,示意图如图9所示。
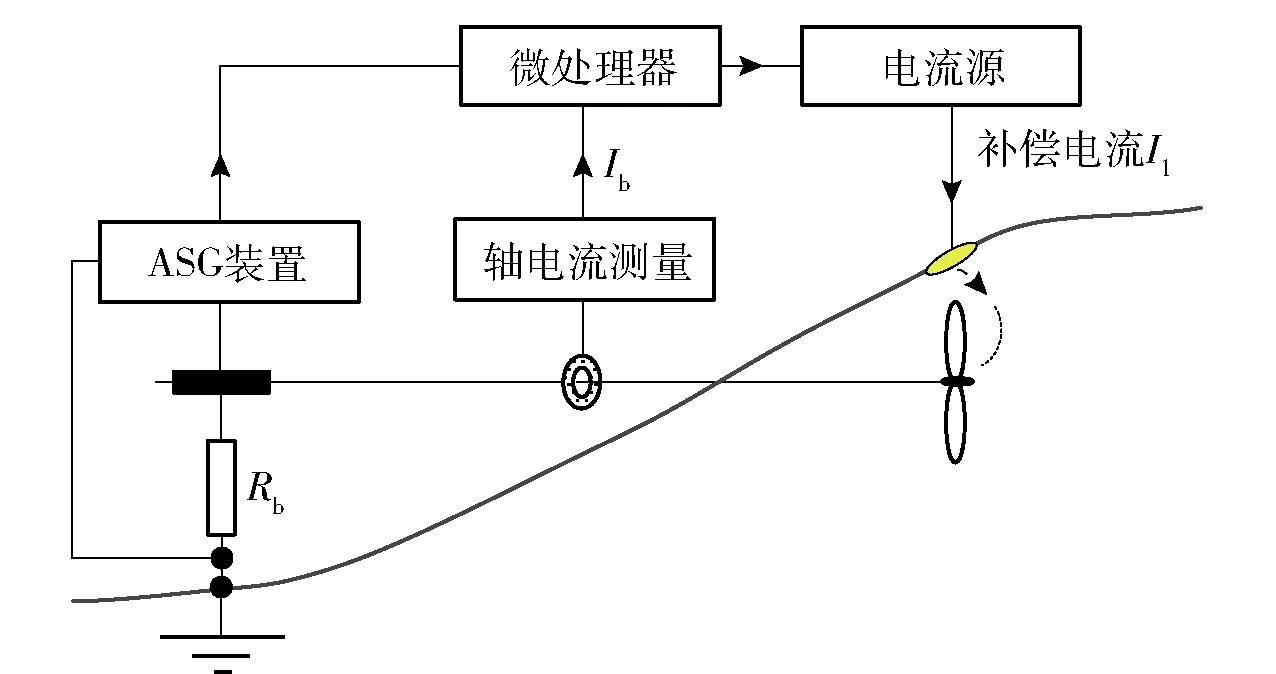
图9 轴静一体化控制流程图Fig.9 Diagram of integrated control of shaft-rate and static electric fields
图9所示方法利用ASG系统的输出电流作为轴电流Ib,也可以采用无接触电流传感器测量轴电流,实测数据表明二者的所测轴电流值基本一致;然后采用微处理器基于增量式PI控制算法实时调整补偿电流I1的输出值,目标是使I1与Ib的比值保持为预先设定值κ.
4 试验验证
为了验证轴静一体化控制的效果,在第3节基础上研制两台原理样机,并进行缩比模型和海上试验验证,试验时两台原理样机分别对应左舷、右舷两侧安装。
4.1 缩比模型试验
1∶50缩比模型及尾部补偿阳极如图10所示,船体结构为涂层钢,螺旋桨为青铜桨。由于此次试验的主要目的是验证轴静一体化控制系统的性能,所以海水电导率仍为4 S/m(未按照缩比模型法设定为0.08 S/m)以增大信号的强度。
图10 缩比模型Fig.10 Scaled ship model
试验前期,首先通过电化学工作站手动调整补偿阳极的输出电流,并实时记录轴电流大小,测量发现当补偿电流与轴电流的比例系数κ为1.18时隐身效果较好。在此基础上,将轴静一体机的补偿系数κ设定为1.18,系统自动工作,水深1.0B(B为模型宽度)处,正横距为0 cm时,自然腐蚀及轴静电场隐身时的轴频电场、静电场如图11所示,其中系统工作时间为10~85 s. 图11中U为电位值,在试验中只测量了水下电位值,因为电场值即是对电位值求梯度,所以用电位值变化表征电场抑制效果是合适的。
图11 隐身前后的电位信号UFig.11 Stealthy effect of electric potential U
试验时,补偿电流与ASG输出电流的波形如图12所示,可见补偿电流与ASG输出电流比值跟踪得较好。
图12 补偿电流与ASG输出电流的波形Fig.12 Compensation current and ASG output current
4.2 实船试验
为了进一步验证系统性能,2017年1月于湛江进行港口试验,试验船舶为中型拖船,测量方法示意图如图13所示。待测船螺旋桨低速旋转,测量传感器安装在测量船(木制渔船)两侧,测量船沿待测船纵向平行方向运动,实时记录水下电场信号,测量系统采样频率为100 Hz.
图13 船体电场测量示意图Fig.13 Schematic diagram of electric field measuring
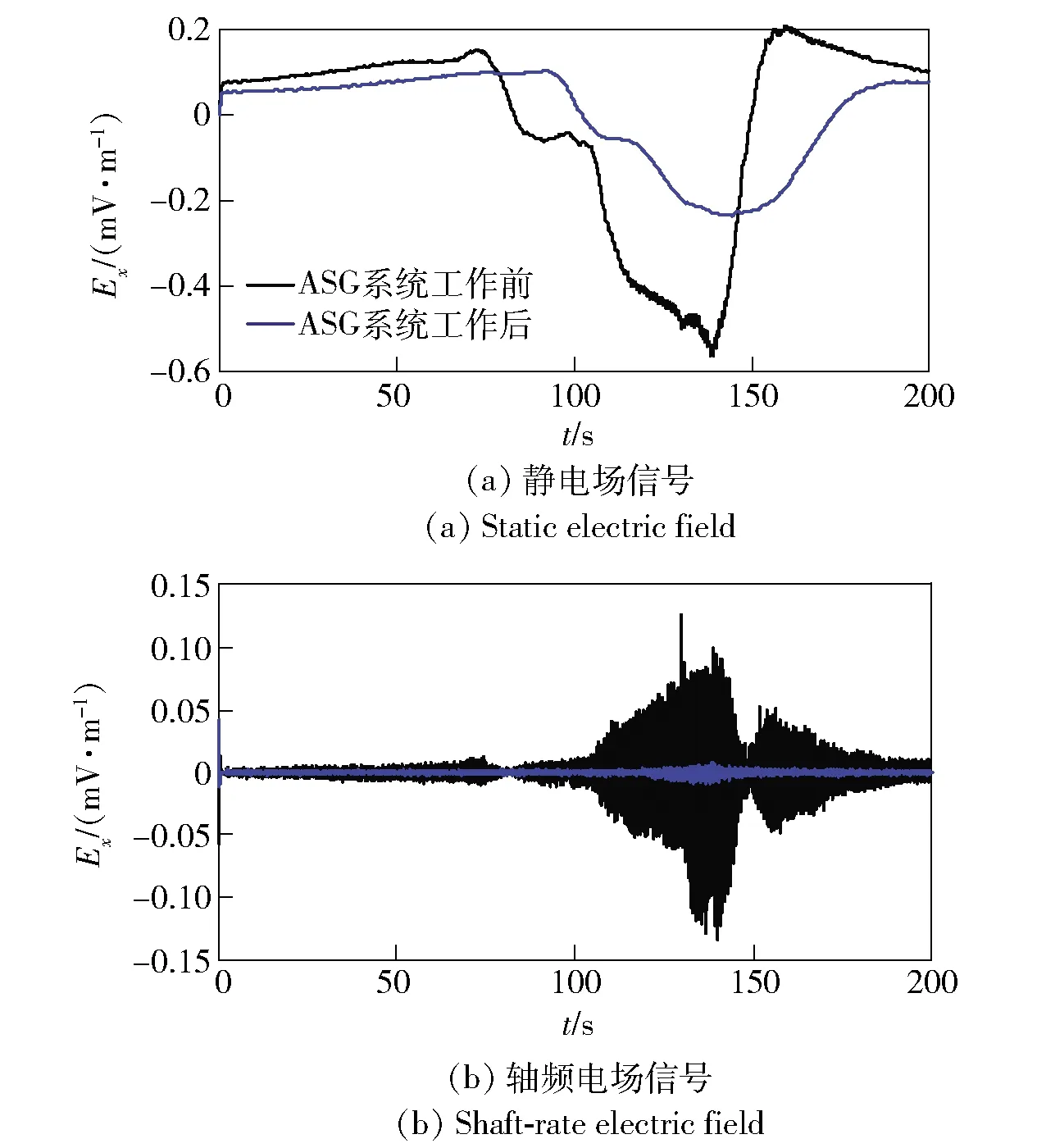
图14 拖船的水下电场信号ExFig.14 Underwater electric field Ex of a tugboat
静电场与轴频电场综合隐身前后,该船的水下电场信号Ex如图14所示,其中,测线的正横距为8.6 m(近似等于0.5B),测量水深为1.0 m. 自然腐蚀状态下,船舶的首尾时刻分别为30 s和142 s,隐身状态下,船舶的首尾时刻分别为46 s和155 s. 由图14可知,轴频电场的抑制效果可达90%以上,静电场的抑制效果为55%以上,实现了静电场与轴频电场的一体化控制。
5 结论
本文在仿真数据、缩比模型试验和实船试验的基础上,对轴频电场隐身方法、静电场隐身方法及二者之间的关系展开了研究。得出以下主要结论:1)外加电流补偿技术将导致轴电流与轴频电场信号的强度增加;2)ASG系统将导致轴电流的明显增大,从而导致静电场增大;3)ASG系统输出电流即为轴电流。在以上结论基础上,提出轴静一体化隐身方案,并研制了轴静一体化电场隐身原理样机,通过船模和实船试验验证了一体化控制方法的有效性。下一步的研究重点是明确一体化控制系统的控制参量与系统动态特性的关系。
猜你喜欢
舰船科学技术(2022年20期)2022-11-28 08:19:52
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14 07:36:00
航空发动机(2020年3期)2020-07-24 09:03:16
中学生数理化(高中版.高二数学)(2020年1期)2020-02-20 13:22:30
新高考·高一物理(2016年7期)2017-01-23 13:28:18
中学生数理化·高二版(2016年9期)2016-05-14 21:55:05
焊接(2015年9期)2015-07-18 11:03:51
海军医学杂志(2015年2期)2015-02-27 13:47:42
广东造船(2015年6期)2015-02-27 10:52:46
中国舰船研究(2014年6期)2014-05-14 06:45:17
