
基于深度学习的高超声速飞行器再入预测校正容错制导
2020-05-19 12:39余跃王宏伦
兵工学报 2020年4期
余跃, 王宏伦
(1.北京航空航天大学 自动化科学与电气工程学院, 北京 100191; 2.北京航天自动控制研究所, 北京 100854;3.北京航空航天大学 飞行器控制一体化技术重点实验室, 北京 100191)
0 引言
高超声速飞行器因其飞行速度快、机动性能好、生存能力强、突防能力高以及远程精确打击等优点,具有重要的战略意义和军事、民用价值[1]。再入制导技术通过设计制导律使得在满足路径约束的前提下平稳到达末端能量管理段,作为高超声速飞行器的核心和关键技术之一,因再入环境的复杂性和不确定性以及再入过程中受热流密度、动压、过载的严格约束,成为各国航空航天领域竞相研究的重点和难点问题[2]。
再入制导算法一般分为标称轨迹制导与预测校正制导两大类。前者是跟踪预先设计好的符合各类约束的标称轨迹完成制导任务,具有计算量小、实时性高的优点,但需预先存储标称轨迹信息,且对环境变化敏感,难以保证较高的制导精度;后者是对落点航程进行预测并实时校正控制量的制导算法,相比于标称轨迹制导,预测校正制导具有更高的落点精度,且对各种再入初始误差和飞行过程中的干扰偏差具有更强的鲁棒性,因此更加受到研究学者的青睐。
预测校正制导算法最早由Schultz等[3]提出,该算法利用预测方程改变升阻比和滚转角同时控制横程和航程,但是制导律缺少轨迹阻尼。Lu[4]针对低升阻比飞行器进行预测校正制导研究,在倾侧角幅值参数化这一核心要素中设计了较大的倾侧角终端值来增加算法鲁棒性,同时提出通过改变初始倾侧角幅值来减轻过载的策略。Xue等[5]针对中高升阻比飞行器提出全约束预测校正制导算法,利用修正的准平衡滑翔条件,将速度- 高度空间的路径约束转化为与速度有关的倾侧角幅值上界,提高了算法处理约束的能力,且保持了算法的简易性和鲁棒性。文献[6]提出一种基于自适应神经模糊系统(ANFIS)的再入预测校正制导算法,设计并训练ANFIS控制器,将终端落点偏差信息输入控制器快速求取校正后的倾侧角幅值,减少了制导指令的解算时间。文献[7]提出一种基于倾侧角参数化的离线弹道优化与在线预测校正相结合的再入制导算法,提升了预测校正算法的实时性,但是该制导算法较为复杂。文献[8]针对传统预测校正制导算法中的终端航程与高度不匹配问题,提出一种基于倾侧角剖面的、严格约束终端高度的预测校正制导算法。文献[9]采用二次函数模型进行倾侧角参数化设计,并利用考虑哥氏加速度项改进的拟平衡滑翔条件,将再入走廊转化为倾侧角幅值约束,提出一种改进的预测校正制导算法。
从已有研究看,预测校正制导算法呈现出良好的发展态势,但仍存在算法实时性不高、鲁棒性不强的问题。此外,高超声速飞行器经常处于低温真空、高辐射的恶劣环境中,其执行机构很容易产生故障,使得飞行器性能恶化甚至系统失稳,往往会造成经济上的重大损失甚至灾难性后果。此时,需要进行姿态容错控制,以保证系统的稳定性和安全性。在一些情况下,姿态环的容错控制可以使飞行器从故障中恢复。但是,当发生较为严重的故障如多个舵面卡死时,原先的攻角指令可能因为飞行器不能旋转配平而无法有效跟踪。针对这种情况,姿态环的容错控制必须结合制导环的容错制导,即根据故障自适应调整制导指令,以获得更大限度的容错能力。
关于高超声速飞行器容错制导的研究目前还非常少。文献[10]设计了一种基于待飞最优路径法的容错制导算法,主要包含外环制导重构和在线轨迹重塑两部分,其中在线轨迹重塑的步骤包括离线轨迹库生成、离线轨迹库建模与编码、在线轨迹重塑。文献[11]根据飞行器当前飞行状态和终端约束条件,使用勒让德伪谱法进行在线轨道重构,生成满足各种轨道约束的最优返回轨迹,并实时反馈更新当前轨道控制量迎角和倾斜角,达到实时最优闭环制导的目的。文献[12]采用相邻可行轨迹存在定理设计了容错制导律,以解决再入段执行器发生故障的轨迹重构问题。
从现有文献看,目前关于容错制导的算法主要存在两方面问题:1)编码复杂,需离线生成和存储大量轨迹,对机载计算机存储空间要求较高,如基于待飞最优路径法的容错制导算法;2)算法实时性差,如基于故障下气动参数估计的伪谱法。分析可知,容错制导的一个关键问题是确定故障后可配平的飞行包线区域和升力系数、阻力系数。一旦求解出这些数据,就可以借助现有成熟的再入制导技术实现故障下的容错制导。
预测校正制导算法对初始误差不敏感,抗扰性、鲁棒性和自适应能力都很强,很适合解决飞行器故障条件下的容错制导问题。然而,高超声速飞行器具有快时变和强不确定性特性,必须进一步提升传统预测校正制导算法的实时性和鲁棒性,以适应飞行器容错制导的需求。此外,还必须考虑飞行器故障时的特点,有针对性地设计容错制导方案。
针对传统预测校正算法的实时性问题,可以从纵向制导律中的预测落点过程入手。预测落点的实质为根据当前状态量和控制量,通过积分预测终点的过程,其中包含大量积分运算,会耗费大量的计算时间和成本。本质上,根据状态量和控制量求取终点是一个非线性映射,可以借助神经网络强大的逼近能力来拟合。然而传统的人工神经网络只是一个浅层结构,参数训练速度慢且容易出现过拟合[13]。近年来深度学习算法因其缓解了传统训练算法的局部最小性而引起广泛关注,使得设计和训练深层神经网络成为可能[14]。
考虑到故障和参数摄动都会对气动参数变化量产生影响,如果深度神经网络没有考虑气动参数变化量的作用,只用标称气动参数来训练,则飞行器故障时的制导精度必然受到影响。为了提高算法的鲁棒性和容错性,可将升力系数、阻力系数变化量作为深度神经网络的输入,根据实际气动参数(故障和气动参数摄动后的气动参数)预测落点,提高算法的制导精度。
基于上述分析,本文针对故障条件下高超声速飞行器的容错制导问题,借助预测校正制导算法抗扰性强、精度高的优势,提出一种基于深度学习的预测校正容错制导算法。该容错制导算法的主要创新点为:1)给出了故障条件下的可行攻角剖面和升力系数、阻力系数的求解方法,为后续设计纵向制导律打下了基础;2)利用深度神经网络代替纵向制导律中的积分运算预测落点的过程,大大提高了算法的实时性,同时深度神经网络的输入参数中包含升力系数、阻力系数变化量,使得预测落点时考虑了故障和参数摄动的影响,算法鲁棒性和容错性大大提高;3)构建了扩张状态观测器(ESO)实时估计升力系数、阻力系数变化量,作为深度神经网络的输入。
1 再入制导问题
1.1 3自由度运动学方程
不考虑地球自转的影响,建立高超声速飞行器3自由度无量纲运动方程[2,5]为
(1)
(2)
K=0.5R0S/m,S为飞行器参考面积,m为飞行器质量,ρ为大气密度,C′L和C′D分别为故障和参数摄动下的升力系数、阻力系数,
(3)
CL和CD分别为标称升力系数和阻力系数,ΔCL和ΔCD分别为升力系数和阻力系数的百分比变化量,主要表征由气动参数摄动和执行机构故障带来的气动参数变化。
需要指出的是,在容错制导中,描述舵面故障的一贯做法是将其转换为升力系数、阻力系数变化量。这是因为如果直接考虑不同的舵面故障,由于有无数个可能的位置和多个舵面组合,处理起来特别繁琐,难以工程应用。从另一个角度看,舵面卡死会改变升力、阻力特性,同时也需要剩余健康舵面合理配置以实现飞行器的旋转配平,这将进一步改变升力、阻力特性。因此,舵面故障的影响可以用升力系数、阻力系数变化量来表征[10]。
1.2 再入过程约束
(4)
(1/r-v2)/r-Lcosσ=0.
(5)
根据实际情况给定一个较小的倾侧角下边界约束值σEQ,(5)式可以转化为如(6)式的拟平衡滑翔约束:
(1/r-v2)/r-LcosσEQ≤0.
(6)
1.3 再入终端约束
高超声速飞行器3自由度无量纲运动方程一般以时间为自变量,然而终端时间的不确定性会给弹道积分带来不便。再入终端高度和速度是已知的,故一般引入类似能量的变量:
(7)
再入飞行终端约束主要包括高度约束、速度约束和经纬度约束,用公式表示为
(8)
式中:ef表示终端能量;rf、vf、θf和φf分别为终端高度、终端速度、终端经度和终端纬度。
2 基于深度学习的预测校正容错制导
预测校正制导包含纵向制导和侧向制导,纵向制导确定倾侧角的幅值,侧向制导确定倾侧角的符号。纵向制导主要包括预测环节和校正环节。利用当前状态量和控制量对飞行器运动方程积分预测落点,得到当前位置到预测落点的待飞航程信息,此为预测环节。利用当前位置到预测落点和终端落点的待飞航程偏差信息对倾侧角幅值进行调节,直至落点偏差在预定范围内,然后输出校正后的倾侧角幅值,此为校正环节。侧向制导采用基于航向角误差走廊的侧向制导逻辑,得到倾侧角的符号。求得倾侧角的幅值和符号后,结合预先设置的攻角剖面以及当前状态量,对运动学方程进行数值积分直至下一个制导周期。不断重复上述预测校正过程,直至飞行器到达预定范围。
上述传统预测校正制导算法在纵向制导中伴随着大量对运动方程积分的过程,由此带来算法实时性问题。同时,高超声速飞行器的一个显著特征是具有强不确定性,即气动参数存在大范围摄动,并且执行机构故障也会给气动参数带来明显变化,此时若仍对标称状态(气动参数未摄动)下的运动方程积分求预测落点,则会导致预测落点精确度不高,并最终影响预测校正制导精度。显然,传统预测校正制导算法的鲁棒性和容错性有待进一步提高。
针对实时性问题,本文利用离线训练好的深度神经网络代替传统算法中积分运算求预测落点的过程,输入当前状态量、控制量以及气动参数变化量即可实时预测落点,从而有效缩短制导指令解算时间,提高算法的实时性。
针对鲁棒性和容错性问题,本文充分考虑气动参数摄动和执行机构故障带来的影响,将升力系数和阻力系数百分比变化量作为深度神经网络的输入,从而可以根据气动参数变化后的运动方程模型预测落点,获得更高的制导精度。为获取当前时刻的气动参数值,基于运动方程模型构造扩张状态观测器估计升力系数、阻力系数变化量。基于深度学习的预测校正容错制导系统原理框图如图1所示。
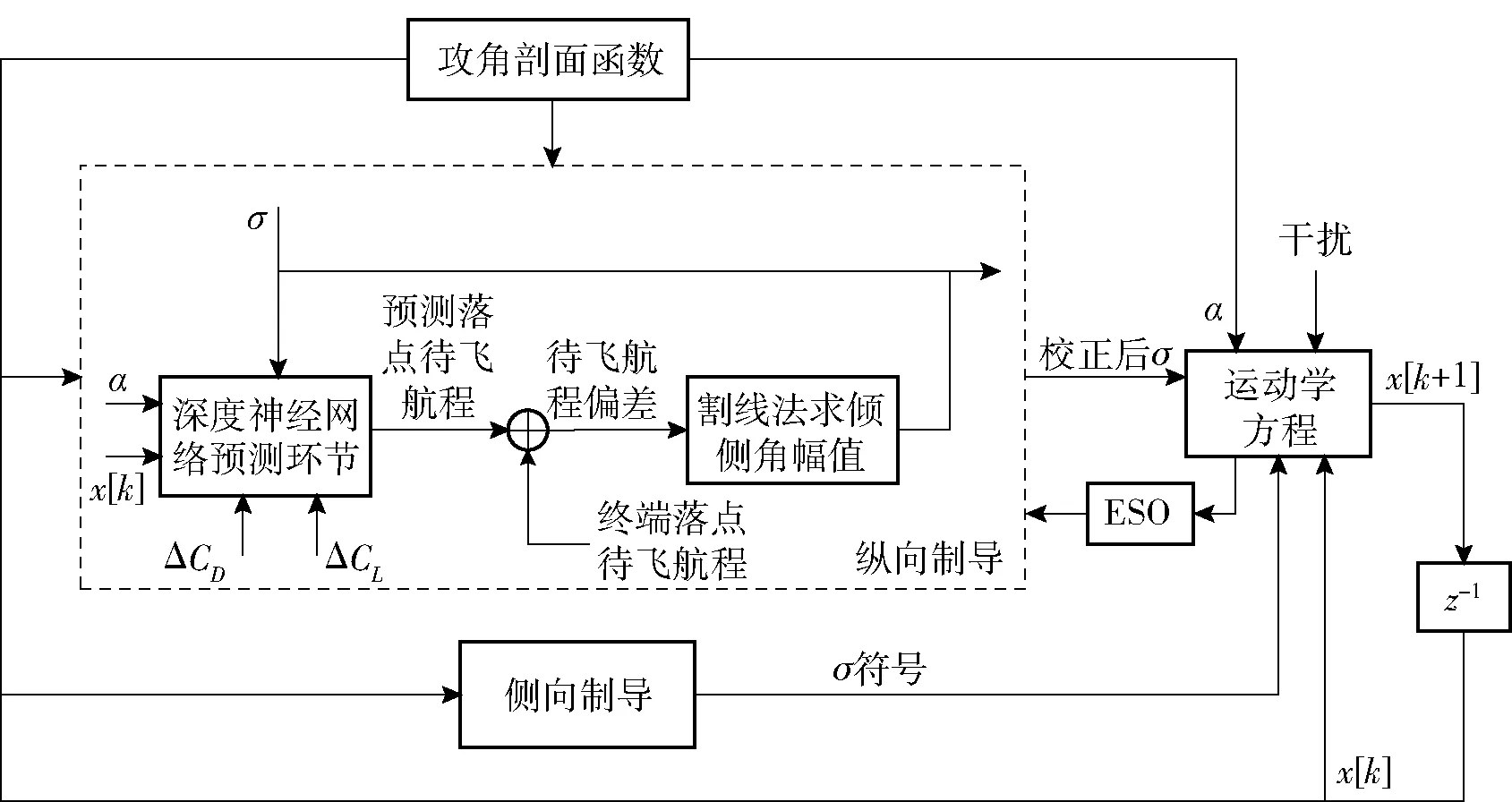
图1 基于深度学习的预测校正容错制导系统原理框图Fig.1 Block diagram of deep learning-based predictor-corrector fault-tolerant guidance system
2.1 纵向制导律设计
2.1.1 攻角剖面
再入走廊是指再入过程中满足所有约束条件的飞行区域,这些约束主要指热流密度、动压、过载和拟平衡滑翔约束。在计算再入走廊之前,需要提前制定好飞行中的攻角方案,一般采用常用的标准攻角方案[17]:
(9)
式中:Ma为马赫数。但是,当执行机构出现故障后,并非在所有攻角情况下飞行器都可以配平。为使飞行器可控,首先需要求取可配平的攻角剖面。
故障条件下,利用控制分配算法配平飞行器。旋转配平飞行器的必要条件是:所有控制面偏角产生的力矩系数与翼身组合体产生的力矩系数大小相等、方向相反,用公式表示为
(10)
式中:Cl,δδ、Cm,δδ、Cn,δδ分别为控制面偏角产生的滚转力矩系数、俯仰力矩系数和偏航力矩系数,δ为控制面偏角向量;Cm,α为翼身组合体俯仰力矩系数。
控制分配器的首要任务是确定最优控制面偏角使得控制不足最小,即(1)式中等式两端的差最小,用公式表示为
(11)

(12)
式中:W为权重向量。
利用求得的舵偏角δ*,在攻角网格上生成翼身组合体和舵偏角产生的升力系数、阻力系数,这些系数合起来就是总的升力系数、阻力系数,表示为
(13)
式中:CL,α和CD,α分别为翼身组合体产生的升力系数和阻力系数;CL,δ*δ*和CD,δ*δ*分别为舵偏角产生的升力系数和阻力系数。
2.1.2 倾侧角约束
利用(11)式求得的攻角可行区域设计攻角方案,并将攻角方案代入再入过程约束(4)式和(6)式中,可得到满足过程约束的高度- 速度剖面,即再入走廊。然而,在再入飞行过程中,如果在每一点上计算高度和速度的关系来验证是否处于再入走廊,会导致巨大的计算量,通常利用拟平衡滑翔条件(5)式将再入走廊的约束转换成倾侧角幅值约束,使得飞行器在倾侧角幅值约束范围内飞行就可以满足再入过程约束。倾侧角幅值限制表示为
(14)

(15)
结合给定的倾侧角下边界约束值,可得倾侧角约束为
σEQ≤|σ|≤|σ|max.
(16)
2.1.3 倾侧角幅值求解
根据飞行特点,再入过程分为初始下降段和拟平衡滑翔段。初始下降段具有较高高度,气动力较小,故采用常值倾侧角|σ0|飞行。拟平衡滑翔段采用基于深度学习的预测校正容错制导。具体说来,在每个制导周期内,给定初始倾侧角的幅值|σi|,结合预设攻角剖面和当前状态,由基于深度学习的神经网络算出当前位置到预测落点的待飞航程,并结合终端落点计算待飞航程偏差。为使偏差为0 rad,采用常用的割线法求出倾侧角幅值,并结合侧向制导求解的倾侧角符号,输出制导指令。与传统算法中对运动方程(1)式进行积分来预测落点相比,本文算法可以避免大量的积分运算过程,从而大大减少在线计算时间,有力地提升预测校正制导算法的实时性。以下详细介绍利用深层神经网络计算当前位置到预测落点待飞航程的过程。
2.1.3.1 深度神经网络
深度学习的概念最早由多伦多大学Hinton等[18]于2006年提出,是指基于样本数据通过一定的训练方法得到包含多个层级的深度网络结构的机器学习过程。传统神经网络随机初始化网络中的权值,导致网络很容易收敛到局部最小值,为解决这一问题,Hinton等[18]提出先使用无监督预训练方法优化网络权值的初值、再进行权值微调的方法,拉开了深度学习的序幕。
深度学习所得到的深度网络结构包含大量单一元素(神经元),每个神经元与大量其他神经元相连接,神经元间的连接强度(权值)在学习过程中修改,并决定网络的功能。通过深度学习得到的深度网络结构符合神经网络的特征,因此深度网络就是深层次的神经网络,即深度神经网络(DNN)[19]。
2.1.3.2 预测环节的输入输出参数
传统预测校正算法预测环节为:根据当前状态变量和控制量,对(1)式进行积分,得到预测落点。由此可得深度神经网络预测环节的输入参数为地心距r、经度θ、纬度φ、速度v、航迹倾角γ、航向角ψ、攻角α、倾侧角σ、升力系数变化量ΔCL和阻力系数变化量ΔCD;输出参数为当前位置到预测落点的待飞航程sp.
2.1.3.3 层数和节点数
利用全连接神经网络来近似预测环节。关于隐含层层数和节点数的选取目前尚没有相关理论支撑,随着隐含层层数和节点数的增加,近似精度会提高,但同时也会增加计算量,因此在选择层数和节点数时需要综合考虑。本文选取5个隐含层,每个隐含层节点数为20,网络结构如图2所示。

图2 深度神经网络结构图Fig.2 Structure diagram of deep neural network
定义深度神经网络每层的变量为fk,1≤k≤7,输入层变量f1=[r,θ,φ,v,γ,ψ,α,σ,ΔCL,ΔCD]T,输出层变量f7=sp,选择指数线性单元(ELU)为激活函数:
(17)
则前向传播计算过程为
fk=fe(fk-1Wk-1+Bk-1),2≤k≤7,
(18)
式中:Wk-1表示fk-1和fk之间的权重矩阵;Bk-1表示fk的偏置向量。
2.1.3.4 深度神经网络的训练
深度神经网络的训练步骤为:
1)样本获取。以方程(1)式中的状态变量和攻角、倾侧角以及升力、阻力系数变化量为输入量,对微分方程(1)式进行积分,得到预测落点,并计算当前位置到预测落点的待飞航程。当状态变量、攻角和倾侧角以及升力、阻力系数变化量按照表1不断变化时,可以得到大量的输入- 输出数据对,用于深度神经网络的训练。
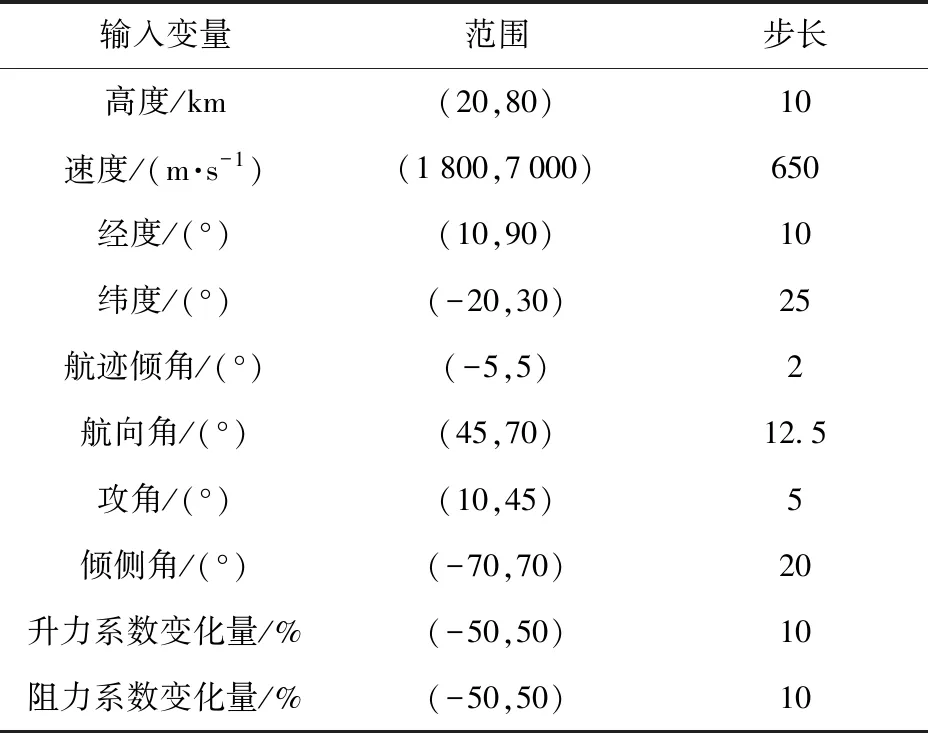
表1 深度神经网络输入量变化情况Tab.1 Input variables of deep neural network
2)网络训练。将1 865 676组输入- 输出数据对用深度神经网络拟合,图3为其中一段100个样本点深度神经网络的拟合值和通过积分运算得到的真实值的对比曲线。图4和图5分别为深度神经网络拟合的绝对误差和相对误差曲线,可以看出拟合相对误差在10%以内。表2为深度神经网络拟合误差统计结果。从表2可知,拟合误差均值为-1.541 9×10-4rad,标准差为0.036 3 rad. 由此可以看出,所训练的深度神经网络对落点预测环节具有很高的近似精度,具有表征该非线性映射的能力。
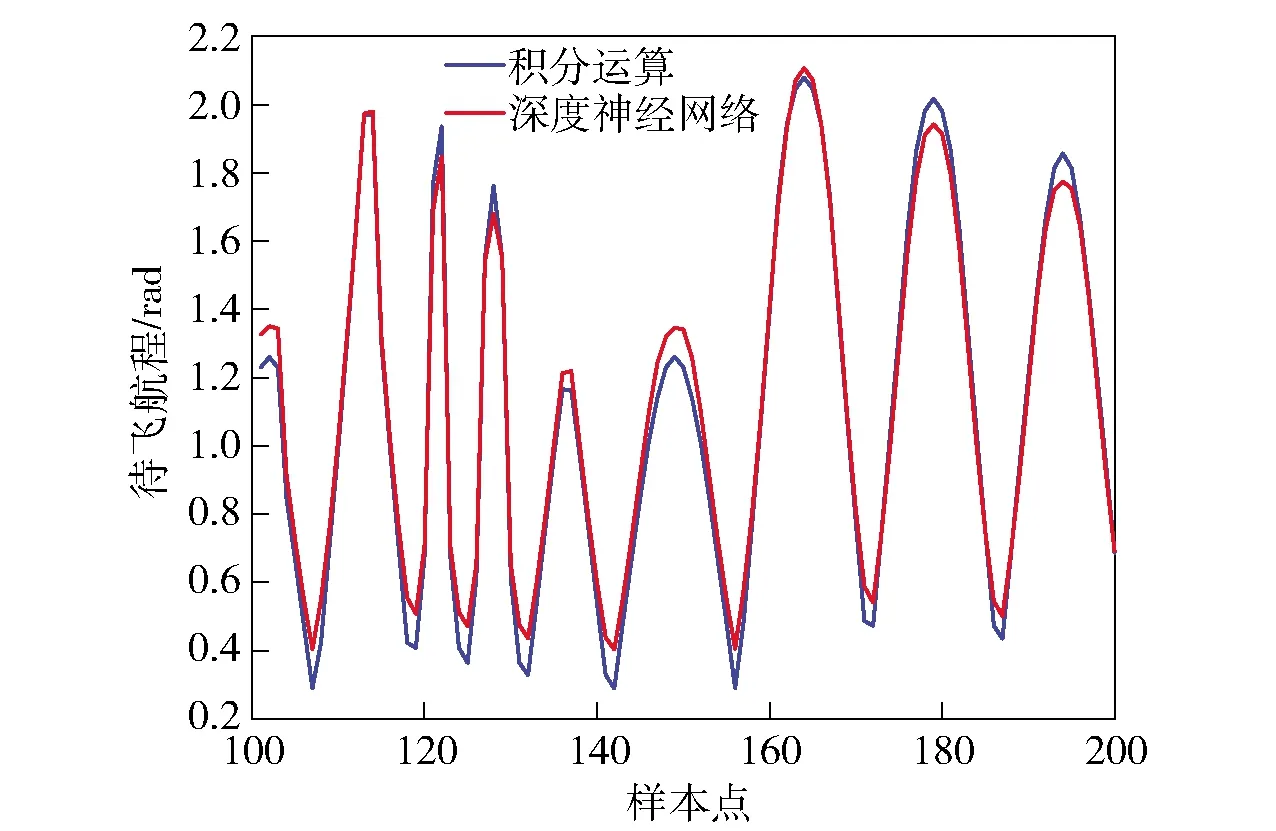
图3 深度神经网络拟合曲线Fig.3 Fitting curve of deep neural network
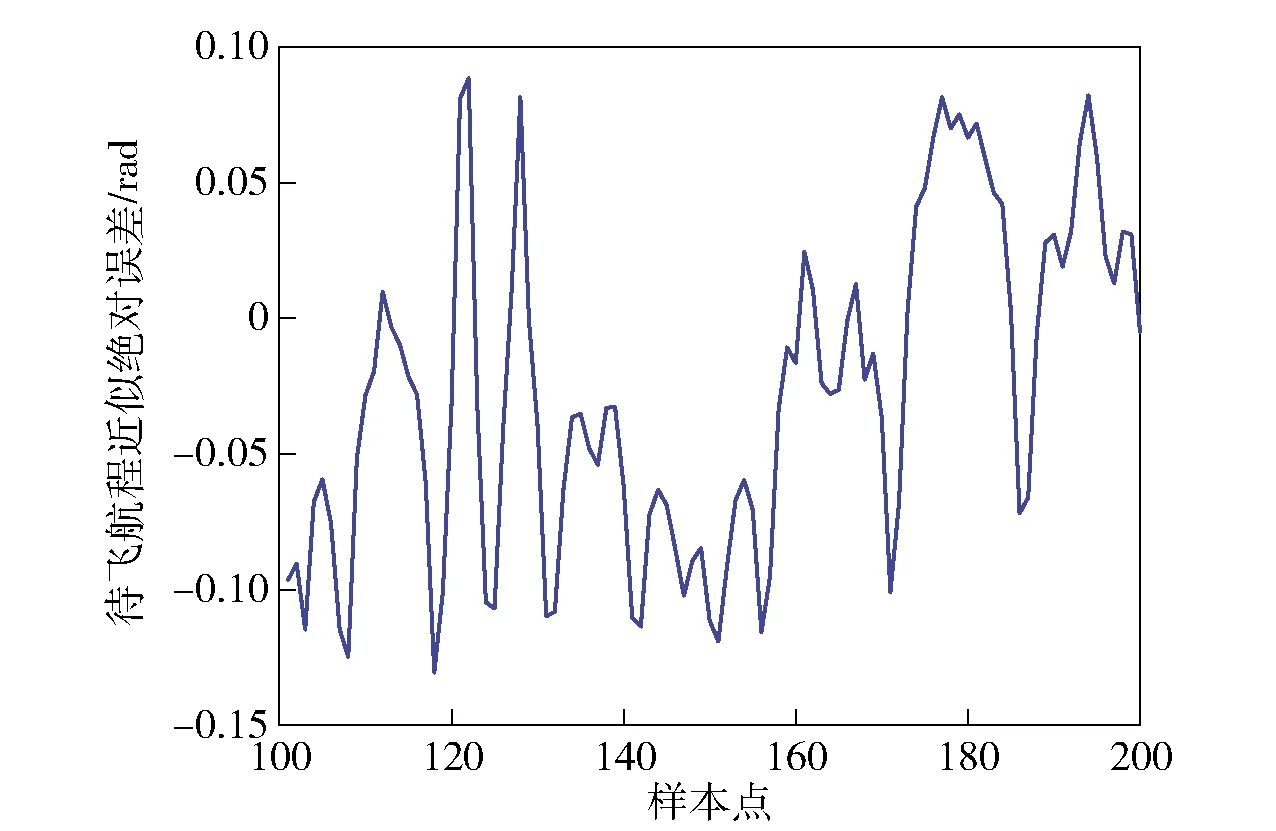
图4 深度神经网络拟合绝对误差曲线Fig.4 Absolute fitting error curve of deep neural network

图5 深度神经网络拟合相对误差曲线Fig.5 Relative fitting error curve of deep neural network
2.1.3.5 割线法求幅值
利用训练的深度神经网络求出待飞航程sp后,计算待飞航程偏差:

表2 深度神经网络拟合误差统计Tab.2 Fitting error statistics of deep neural network
fi(|σi|)=sp-sf,
(19)
式中:sf为当前位置到终端落点的待飞航程,
sf=arccos (sinφsinφf+cosφcosφfcos (θf-θ)).
(20)
为使待飞航程偏差为0 rad,需求得方程fi(|σi|)=0 rad的零解,利用割线法可计算倾侧角幅值为
(21)
2.2 侧向制导律设计
设计侧向制导律主要是为了求取倾侧角的符号。在初始阶段,倾侧角选取与再入点航向误差相反的符号。在随后的再入飞行过程中,为了满足飞行过程中各种约束条件和预期的落点精度要求,需要在特定的时候使倾侧角的符号反向。然而,过多的反转次数会破坏飞行的自适应性和鲁棒性[10]。因此,一个好的反转逻辑是使得末端航向角误差在设定范围内,同时具有较少的反转次数。
定义Φ为当前位置到目标点的视线方位角,其计算式为
(22)
由此可得航向角误差为Δψ=ψ-Φ. 为使落点达到期望的精度范围,航向角误差需满足:
-Δψmax≤Δψ≤Δψmax,
(23)
式中:Δψmax为航向角误差上界。航向角误差走廊如图6所示。
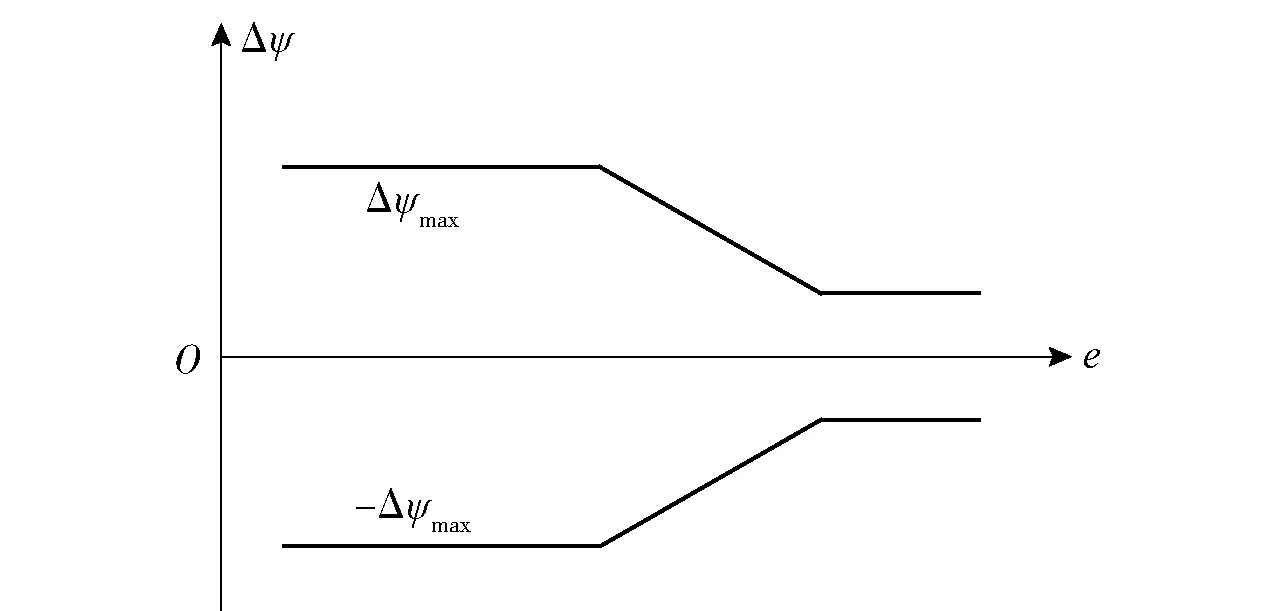
图6 航向角误差走廊Fig.6 Heading angle error corridor
倾侧角反转逻辑为:当航向角误差超出误差上界Δψmax时,倾侧角符号为负;当航向角误差满足误差范围(18)式时,倾侧角符号保持不变;当航向角误差超出误差下界-Δψmax时,倾侧角符号为正。上述反转逻辑用公式表示为
(24)
在实际飞行中,本节提出的深度神经网络是有一定适应边界的,这主要是因为训练深度神经网络的数据集存在一定的边界。虽然深度神经网络具有一定的泛化能力,但是为了确保飞行安全,飞行的状态量、控制量以及气动参数变化量需要在该边界范围内。具体地,高度范围为[20 km, 80 km],速度范围为[1 800 m/s,7 000 m/s]s,经度范围为[10°, 90 °],纬度范围为[-20°, 30°],航迹倾角范围为[-5°, 5°],航迹偏角范围为[45°, 70°]°,攻角范围为[10 °, 45°],倾侧角范围为[-70°, 70°],升力系数变化量为[-50%, 50%],阻力系数变化量为[-50%, 50%],当飞行器的变量满足上述范围时,可采用本节所提基于深度学习的预测校正容错制导算法。在一些情况下,飞行器的变量在上述范围之外,可补充更大范围的数据集对深度神经网络进一步训练,以扩大本节容错制导算法的适用范围。
关于基于深度学习的预测校正容错制导算法的收敛性,现从两方面分析:一是传统预测校正制导算法的收敛性,如果利用传统的预测校正算法没法求出满足再入终端约束的倾侧角和攻角指令,则说明终端落点是不可达的,算法无法收敛,此时采用基于深度学习的预测校正容错制导算法也无法收敛;二是深度神经网络近似非线性映射关系的收敛性,理论上,对于任意一个3层或者3层以上神经网络,只要隐含层神经元数目足够多,该网络就能以任意精度逼近一个非线性映射关系[20]。本文采用深度神经网络,包含5个隐含层,每个隐含层节点数为20,能以很高精度(相对误差小于10%)来近似“积分运算求预测落点”这个非线性映射关系。因此,只要终端落点是可达的,本文所提基于深度学习的预测校正容错制导算法极大概率就是收敛的。
3 气动参数变化量估计
为了在存在气动参数摄动条件下准确地预测落点,2.1.3节已经构造了输入包含气动参数变化量的深度神经网络。因此,要想预测落点,首先要考虑气动参数变化量的获取问题。借鉴自抗扰控制中利用ESO估计干扰的思想,本文在制导环构建ESO对气动参数变化量进行估计,并将估计值输入深度神经网络预测落点,输出当前位置到预测落点的待飞航程。
结合飞行器3自由度运动方程(1)式,参考文献[21-22]中ESO的构造方法,构造ESO估计阻力相关项:
(25)
式中:ev为速度的估计误差;z1v为速度v的估计;z2v为阻力相关项-D的估计;β1v和β2v为观测器增益。结合(3)式可得,阻力系数百分比变化量估计为
(26)
类似地,构造ESO估计升力相关项:
(27)
式中:eγ为航迹倾角的估计误差;z1γ为航迹倾角γ的估计;z2γ为升力相关项Lcosσ/v的估计;β1γ和β2γ为观测器增益。结合(2)式可得升力系数百分比变化量估计为
(28)
可以证明,当ESO增益取合适值时,升力系数百分比变化量ΔCL和阻力系数百分比变化量ΔCD能被ESO快速精确估计。
4 仿真分析
考虑文献[2]中的再入初始状态,高度H0=80 km,速度v0=7 100 m/s,经度θ0=10°,纬度φ0=-20°,航迹倾角γ0=-1°,航向角ψ0=45°,其中下标0表示再入初始值。执行机构故障类型为:右内侧升降舵δ1、右外侧升降舵δ2、左内侧升降舵δ3和左外侧升降舵δ4均卡死在-20°. 终端约束为:经度θf=90°,纬度φf=30°,高度Hf=20 km,速度vf=1 800 m/s. 要求终端位置误差小于10 km,速度误差小于100 m/s,高度误差小于2 km,热流密度约束为1.5 MW/m2,动压约束为200 kPa,过载约束为4.5g. 为验证本文所提容错制导算法的可行性和优越性,将文献[5]中传统的预测校正制导算法和基于深度学习的预测校正容错制导算法仿真结果进行对比。
4.1 可行攻角剖面分析
当X-33飞行器的4个升降舵都卡死在-20°时,可供选择的攻角范围受到限制,如果攻角剖面选择不合理,则飞行器会处于失控状态。根据(11)式中的优化原则,得到仿真样例故障的配平不足曲线,如图7所示。由图7可知:当攻角α∈[-10°,20°]∪[38.8°,50°]时,配平不足值JD=0,表明飞行器三轴力矩处于平衡状态,飞行器可旋转配平;当α∈(20°,38.8°)时,配平不足值JD>0,表明飞行器三轴力矩处于非平衡状态,飞行器不可旋转配平。考虑故障条件下飞行器的可控性和安全性需求,本文选取故障条件下的攻角剖面为α=12°.
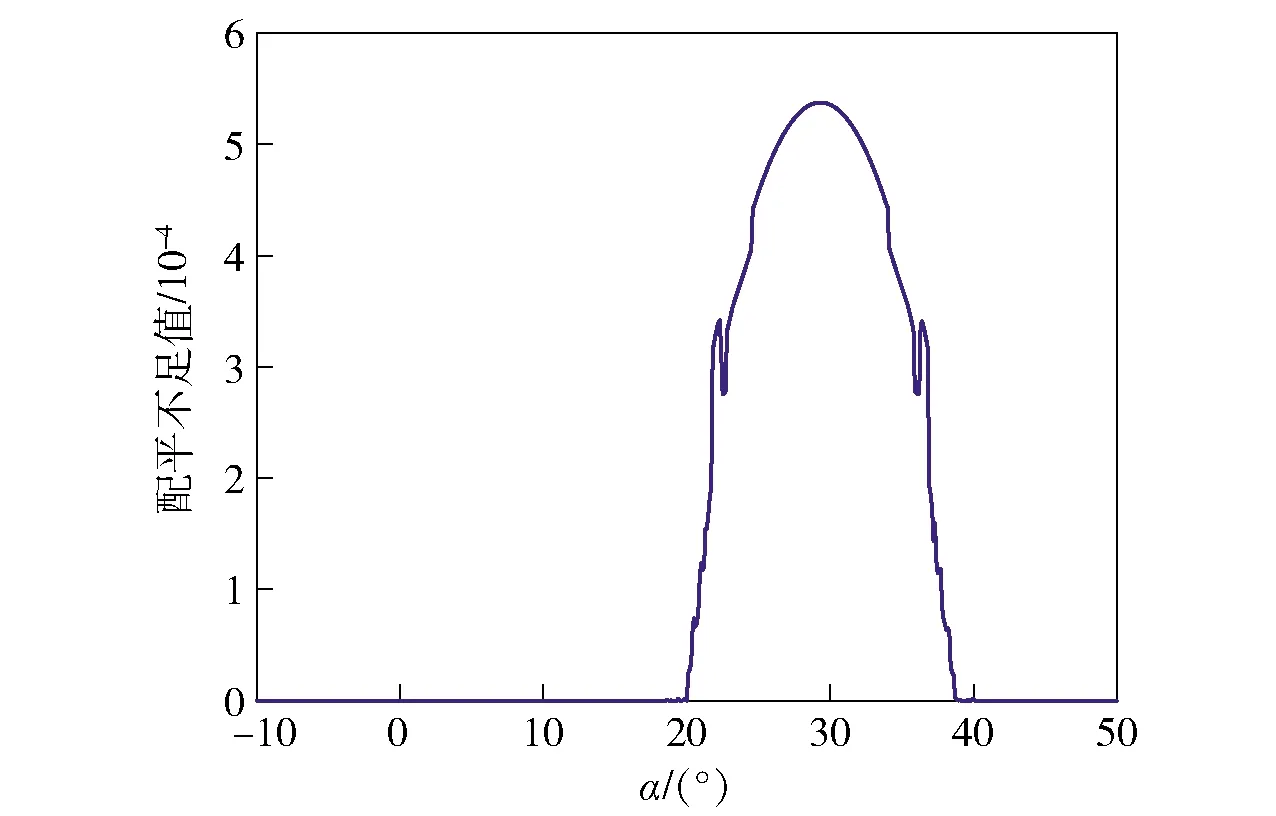
图7 故障下的配平不足曲线Fig.7 Trim deficiency curve in case of fault
4.2 气动参数变化量估计分析
由(13)式分别求出标称条件下的升力系数、阻力系数CL和CD以及故障和气动参数摄动下的升力系数、阻力系数C′L和C′D,并由(3)式求得升力系数、阻力系数变化量ΔCL和ΔCD,其曲线如图8和图9所示。由图8和图9可知,升力系数、阻力系数变化量大体处于合理范围,但是升力系数变化量在零攻角处存在尖峰,这是因为标称升力系数在零攻角处值太小导致。在4.1节中,已经选取攻角剖面为α=12°,则由图8和图9可得由于故障导致的升力、阻力系数百分比变化量分别为1.82%和16.91%.
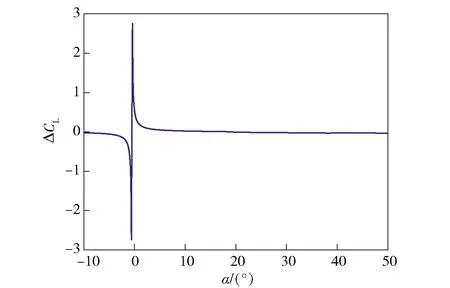
图8 升力系数变化量Fig.8 Variation of lift coefficient
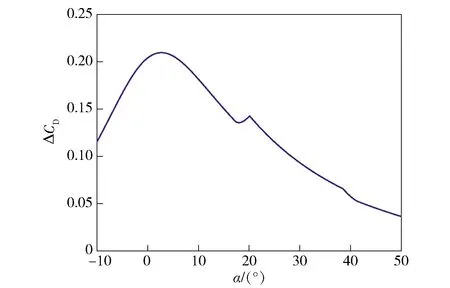
图9 阻力系数变化量Fig.9 Variation of drag coefficient
除了故障会导致气动参数变化之外,复杂的大气环境、传感器误差以及建模误差也会导致气动参数存在摄动。为了更好地展示ESO对气动参数变化量的估计,考虑气动参数摄动在[-30%,30%]之内变化,并用正弦函数30sin(1.5t)表征。在故障和气动参数摄动的综合作用下,总的升力系数、阻力系数变化量估计曲线如图10和图11所示。由图10和图11可见,ESO可对气动参数变化量实时精准估计,为将气动参数变化量输入深度神经网络、实现故障和气动参数摄动下的飞行器落点精准预测提供有力保障。
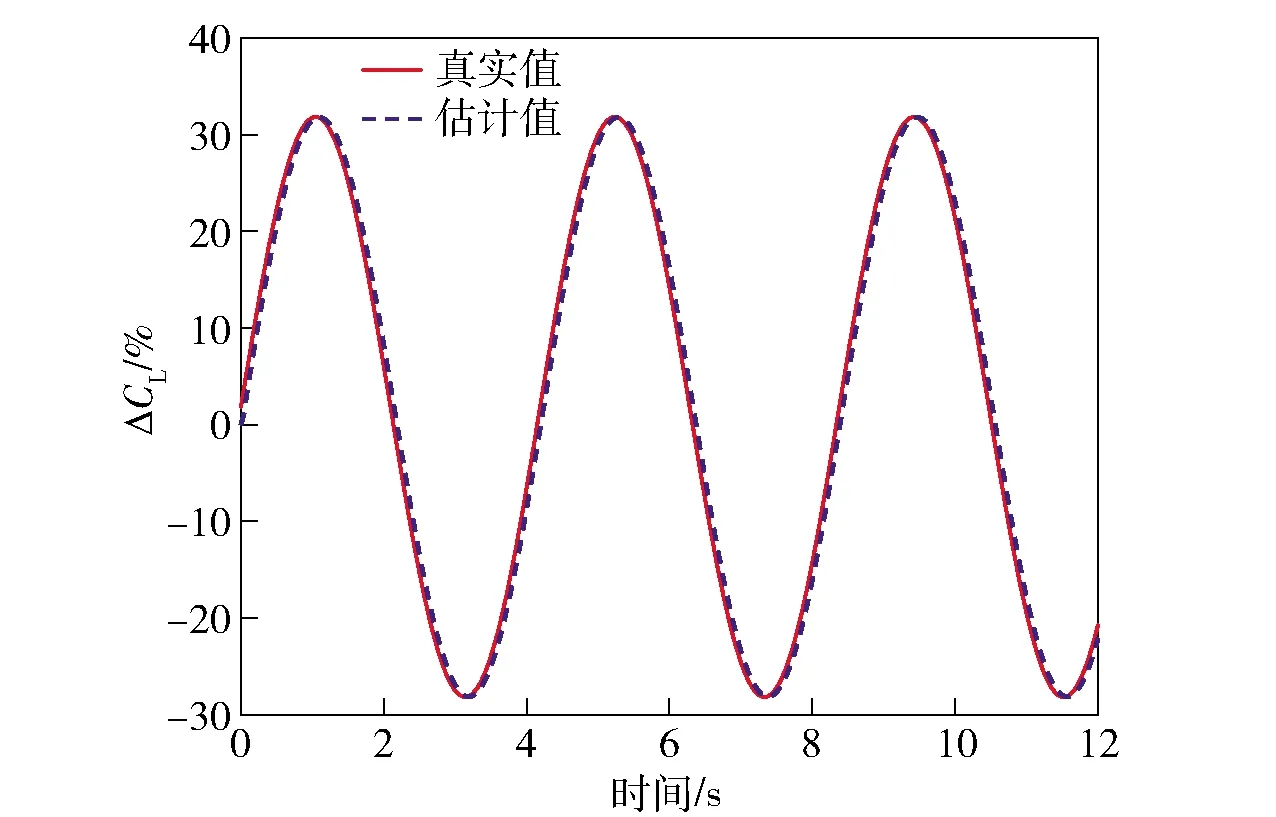
图10 升力系数变化量估计Fig.10 Estimation of lift coefficient variation
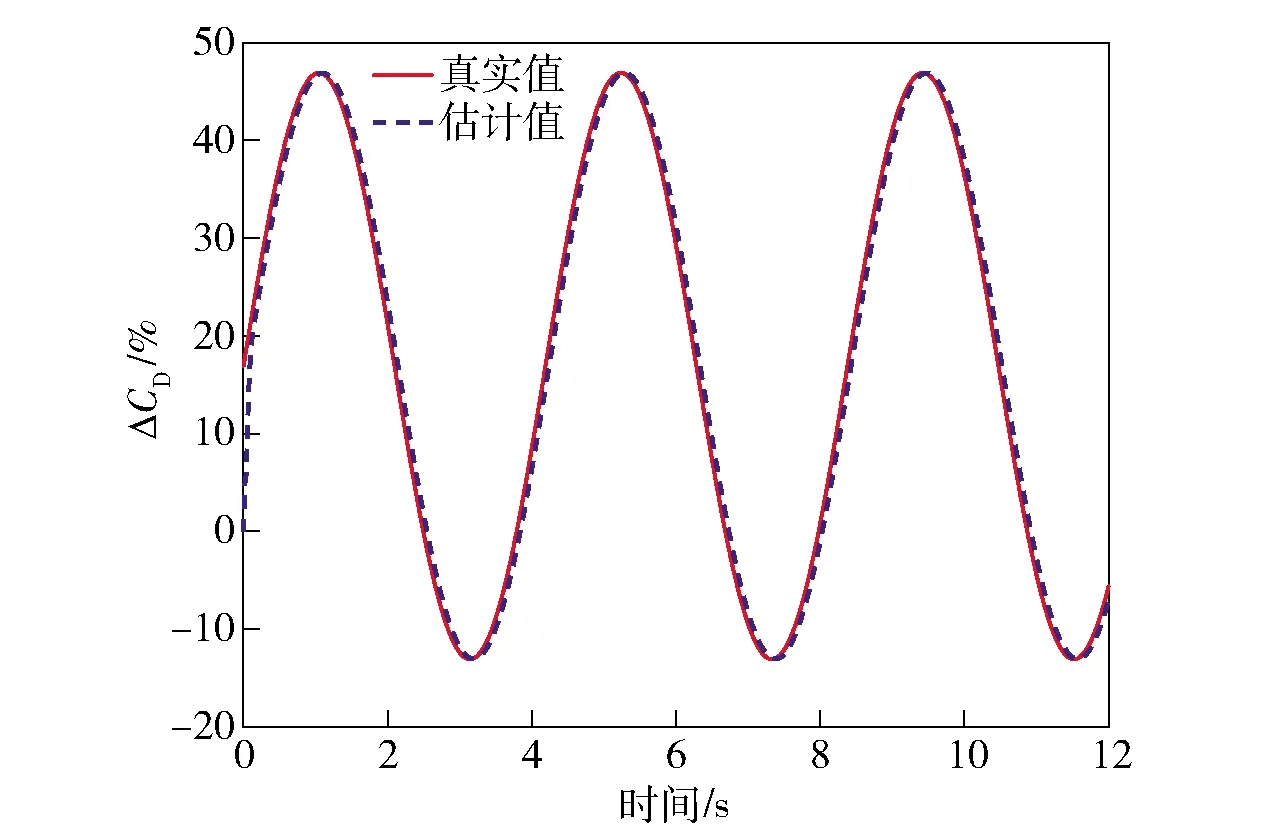
图11 阻力系数变化量估计Fig.11 Estimation of drag coefficient variation
4.3 标准条件下制导仿真分析
在前述标准初始状态且不考虑过程扰动的情况下,分别采用传统预测校正制导算法和基于深度学习的预测校正容错制导算法进行制导仿真。终端状态误差和算法运行时间如表3所示。
从表3中可以看出,两种预测校正制导算法均能达到终端误差要求且误差数值较小,在终端速度约束方面,两种算法效果相当,在终端位置和高度约束方面,深度学习容错制导算法优于传统制导算法。值得注意的是,深度学习容错制导算法采用深度神经网络提前建立了状态量、控制量以及气动参数变化量与预测落点的非线性映射关系,避免了传统制导算法中大量的积分运算过程,从而使得制导指令解算时间大大减少。传统制导算法的制导指令解算时间为195 649 ms,而深度学习容错制导算法为9 587 ms;具体到每个制导周期,传统制导算法的制导指令平均解算时间为103.46 ms,而深度学习容错制导算法为5.02 ms. 因此深度学习容错制导算法实时性远远高于传统制导算法。
表3 终端状态误差和算法运行时间Tab.3 Terminal state error and operation time
图12为两种预测校正制导算法下的三维轨迹曲线图,可见两条轨迹基本重合,均能从再入初始点跳跃滑翔至预定终端落点。图13为两种算法的倾侧角- 航程距离曲线图,其中s表示航程距离。从图13中可以看出,倾侧角在约束范围内变化且反转次数较少。图14~图16分别为热流密度、动压和过载历程曲线,横虚线表示约束边界,从中可以看出,再入飞行时过程约束均得到满足。
图12 两种预测校正制导算法的三维轨迹曲线Fig.12 Three-dimensional trajectories of two predictor-corrector guidance algorithms
图13 倾侧角- 航程距离曲线Fig.13 Curves of bank angle-downrange

图14 热流密度- 航程距离曲线Fig.14 Curves of heat flux density-downrange
图15 动压- 航程距离曲线Fig.15 Curves of dynamic pressure-downrange
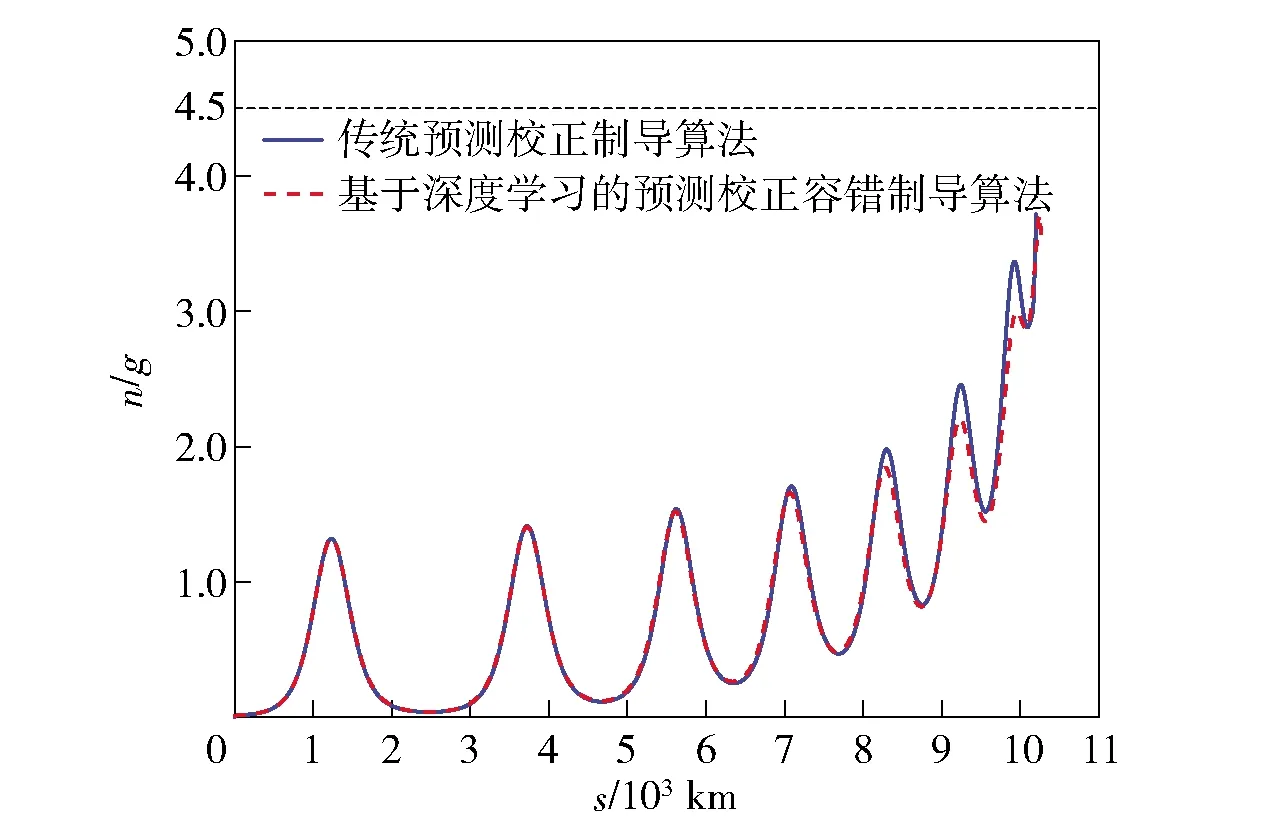
图16 过载- 航程距离曲线Fig.16 Curves of overload-downrange
4.4 故障和干扰条件下制导仿真分析
为验证基于深度学习的预测校正容错制导算法的容错性和鲁棒性,对存在初始状态偏差、执行机构卡死故障以及气动参数摄动的情况进行仿真分析。偏差和摄动如表4所示。
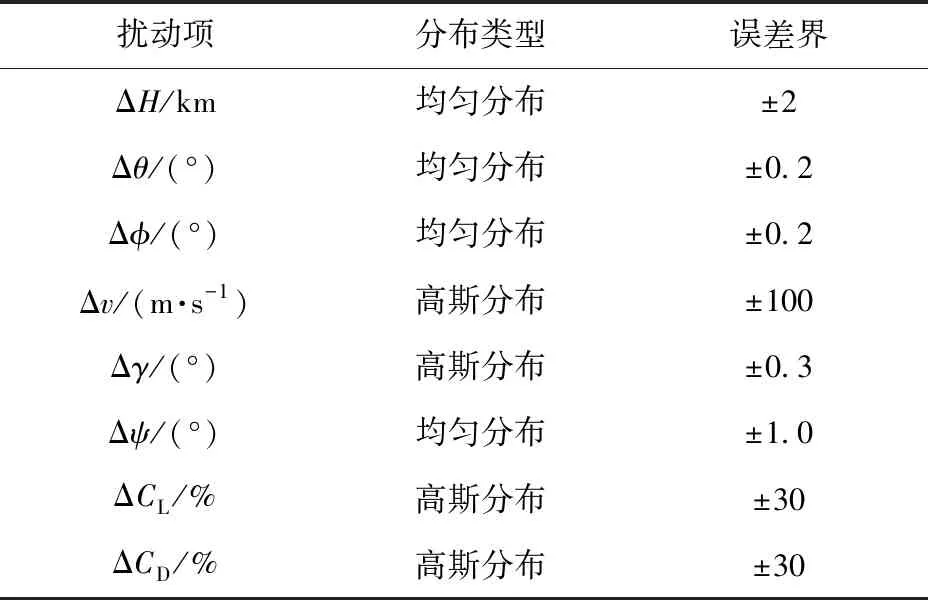
表4 初始状态偏差和参数摄动Tab.4 Initial state error and parameter perturbation
需要说明的是,表4中的升力系数、阻力系数变化量ΔCL和ΔCD仅仅是指由气动参数摄动引起的变化,变量在区间[-30%,30%]内服从高斯分布。此外,还有由故障引起的升力系数、阻力系数变化,分别为1.82%和16.91%,需要在仿真时一并考虑。
在扰动条件下采用基于深度学习的预测校正容错制导算法进行100组Monte Carlo仿真,图17~图23给出了制导仿真曲线。由图17~图23可以看出,倾侧角在约束范围内经过5次左右反转后,飞行器能在终端约束范围内达到目标点,且再入过程中热流密度、动压和过载都满足约束条件。
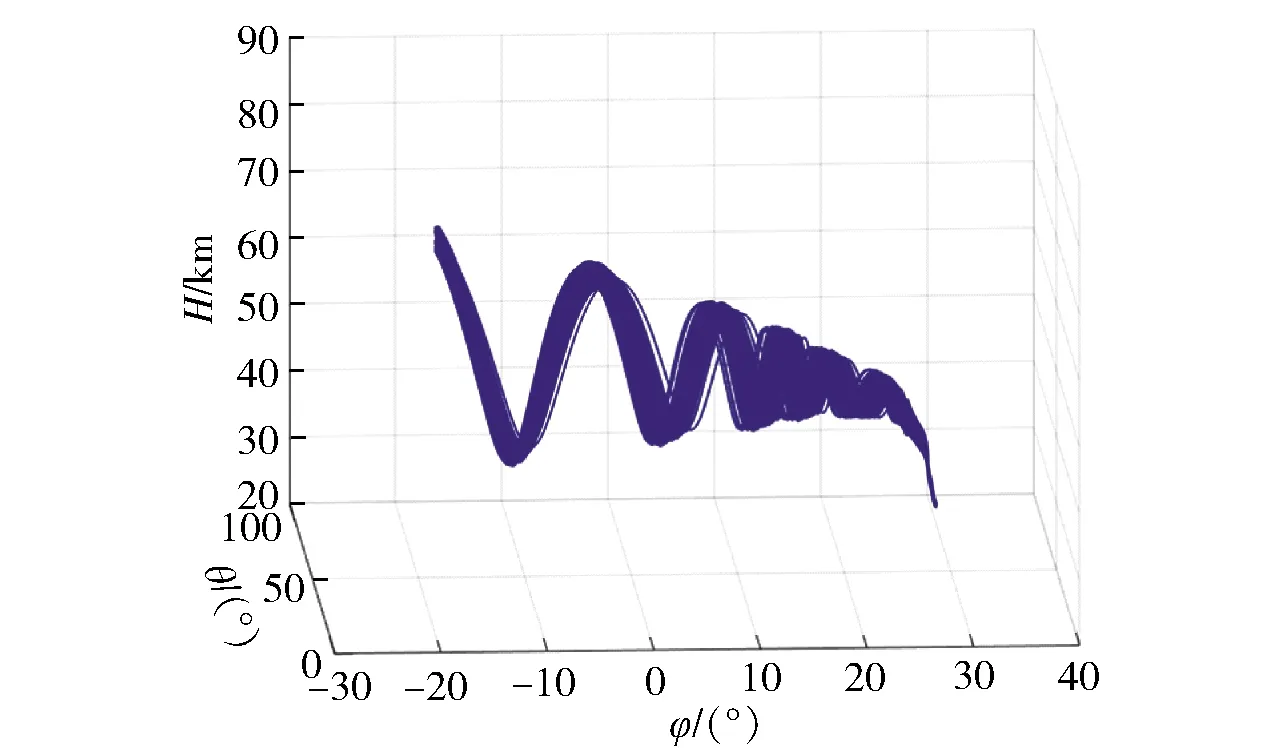
图17 三维轨迹图Fig.17 Three-dimensional trajectory curve
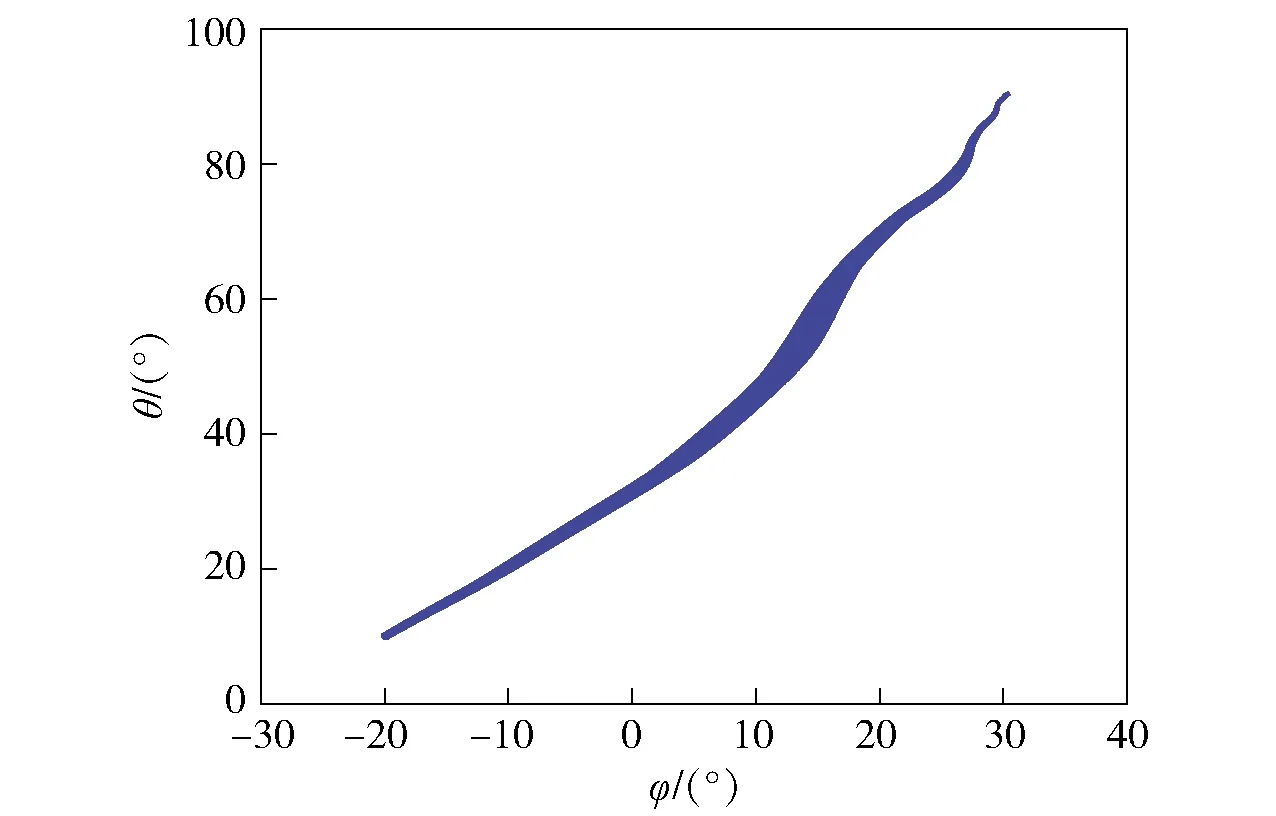
图18 二维航迹图Fig.18 Two-dimensional trajectory curve
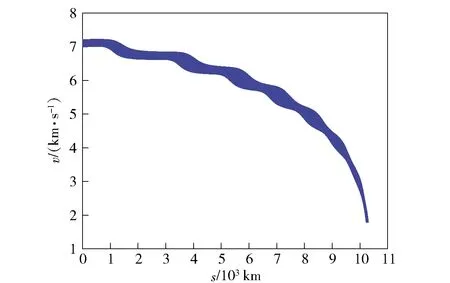
图19 速度剖面图Fig.19 Velocity curve
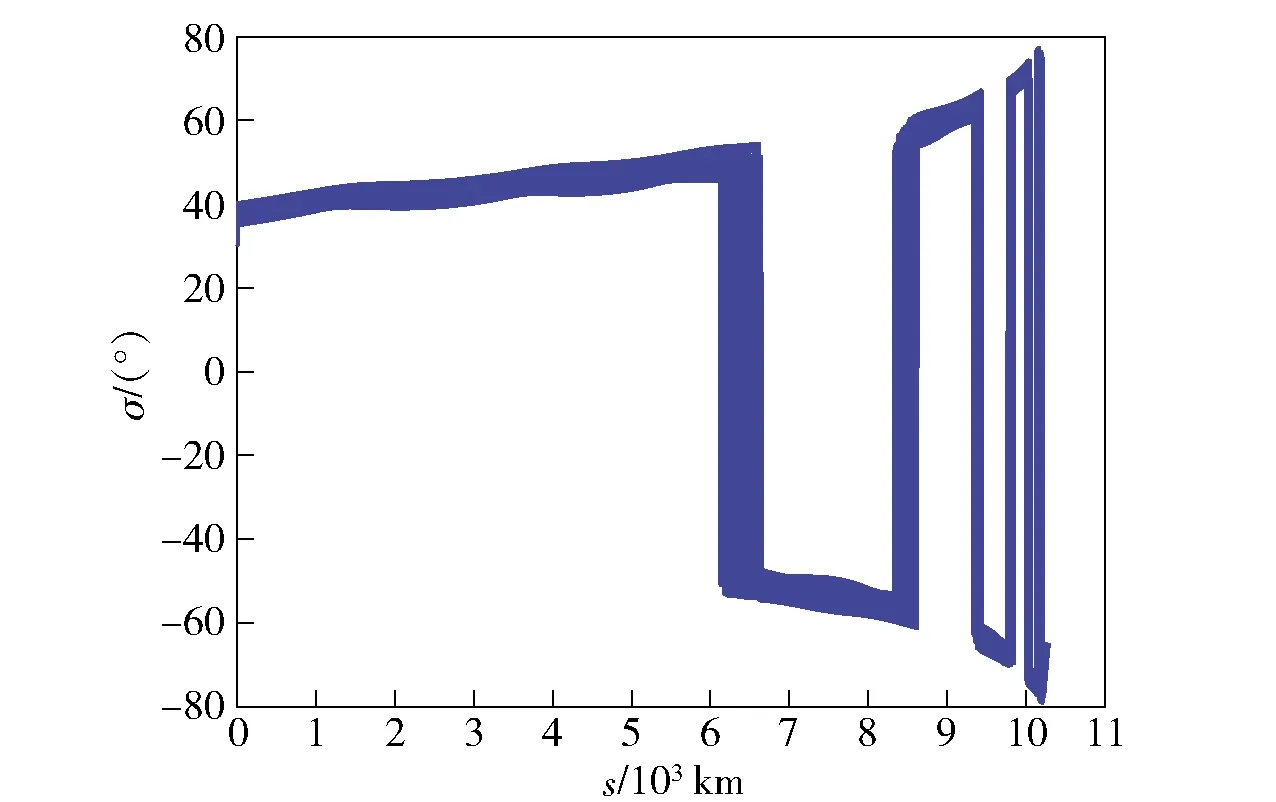
图20 倾侧角剖面图Fig.20 Bank angle curve
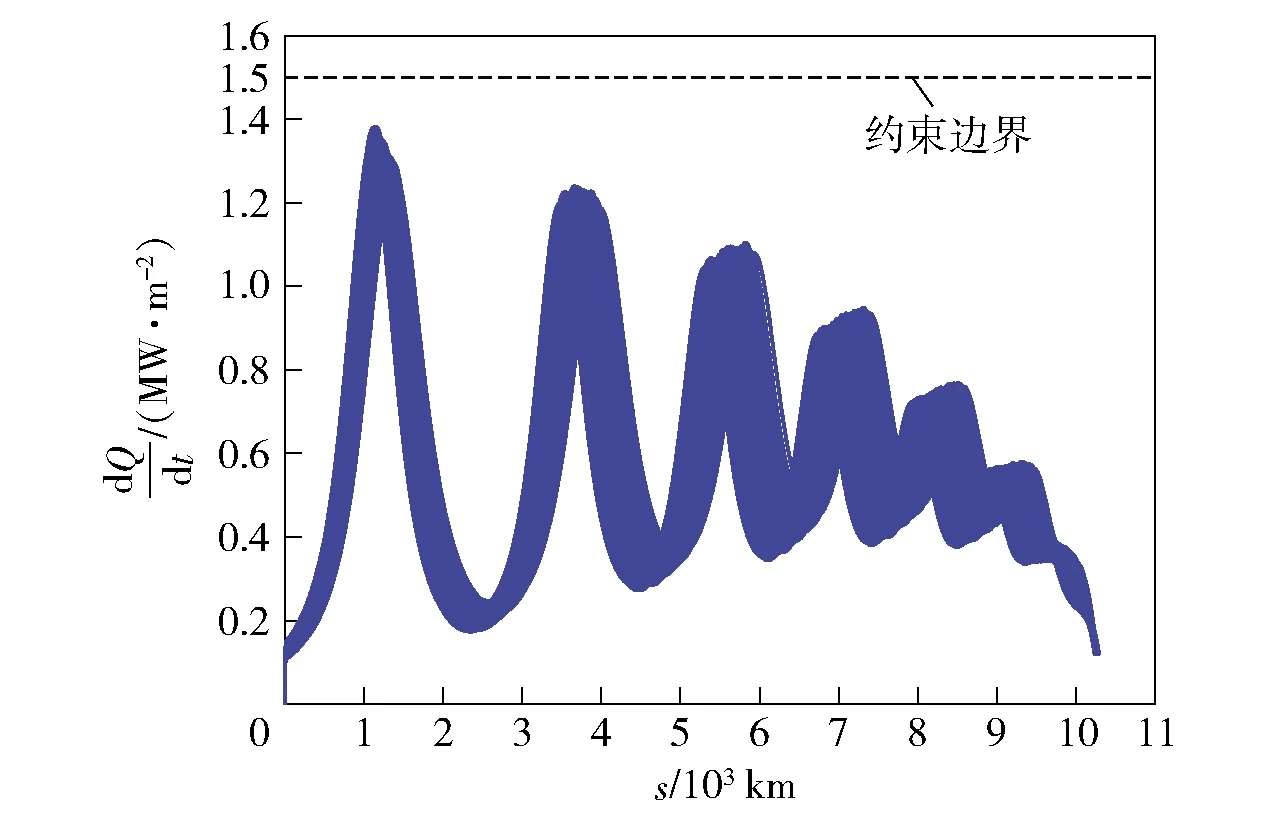
图21 热流密度剖面图Fig.21 Heat flux density curve
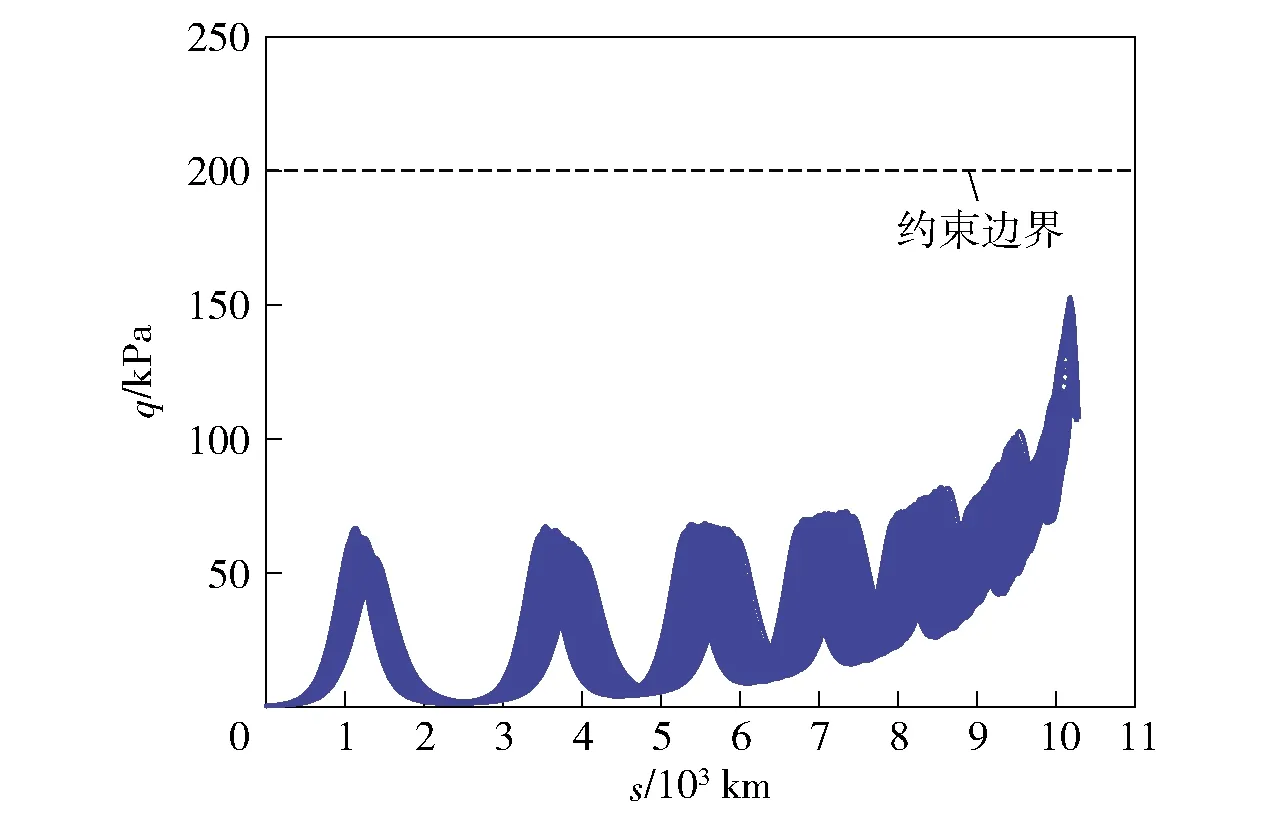
图22 动压剖面图Fig.22 Dynamic pressure curve
图23 过载剖面图Fig.23 Overload curve
图24给出了故障和干扰条件下两种制导算法100组Monte Carlo仿真的落点经纬度散布图。由图24可见:采用基于深度学习的预测校正容错制导算法时,飞行器落点位置误差均小于5 km;采用传统预测校正制导算法时,有相当一部分落点位于目标落点10 km之外。由此可见,在故障和干扰条件下,基于深度学习的预测校正容错制导算法具有更高的制导精度,也证明了该算法具有更好的容错性和鲁棒性。
图24 故障和干扰条件下落点经度和纬度散布图Fig.24 Longitude and latitude dispersion under the conditions of fault and disturbance
图25 制导指令解算时间Fig.25 Calculating time of guidance command
图25给出了两种制导算法制导指令解算时间的100组仿真数据。由图25可以看出,基于深度学习的预测校正容错制导算法在制导指令解算上远远快于传统预测校正制导算法。表5进一步给出了制导指令解算时间的统计数据。由表5可见:传统预测校正制导算法仿真时间均值为199.32 s,标准差为4.44 s;基于深度学习的预测校正容错制导算法的平均仿真时间仅为9.31 s,标准差为0.42 s. 以上结果表明本文所提算法能使传统算法的制导指令解算时间减少95%,大大提高了传统算法的实时性。这是因为提前离线生成深度神经网络来预测落点,有效避免了传统算法中通过大量积分运算预测落点的过程。
表5 制导指令解算时间统计数据Tab.5 Calculating time of guidance command s
5 结论
本文针对故障条件下高超声速飞行器的容错制导问题,借助预测校正制导算法抗扰性强、精度高的优势,提出一种基于深度学习的预测校正容错制导算法。仿真结果表明:
1)故障条件下通过控制分配算法能有效求解可行攻角剖面和升力系数、阻力系数。
2)ESO可对气动参数变化量实时精准估计,为深度神经网络精确预测落点提供了基础。
3)在标准条件下,传统预测校正制导算法与基于深度学习的预测校正容错制导算法的制导精度相当。
4)在故障和干扰条件下,基于深度学习的预测校正容错制导算法的制导精度大大优于传统预测校正制导算法,前者飞行器落点位置误差均小于5 km,后者飞行器有相当一部分落点位于目标落点10 km之外。
5)基于深度学习的预测校正容错制导算法的实时性远远优于传统预测校正制导算法,能使传统算法的制导指令解算时间减少95%.
猜你喜欢
北京航空航天大学学报(2022年5期)2022-06-06
北京航空航天大学学报(2021年4期)2021-11-24
北京航空航天大学学报(2021年6期)2021-07-20
中国新技术新产品(2020年19期)2020-12-25
科技视界(2020年26期)2020-09-24
国学(2020年1期)2020-06-29
佛山陶瓷(2017年8期)2017-09-06
太空探索(2016年12期)2016-07-18
当代文萃(2010年5期)2010-05-21
小品文选刊(2009年10期)2009-05-27
