基于无人机平台的仿生机械臂的研发
2020-05-11 05:54朱圣强王思贤杨聶维杜家栋司海旭
科教导刊·电子版 2020年2期
朱圣强 王思贤 杨聶维 杜家栋 司海旭


摘 要 如今,由于无人机优异的性能,已逐渐替代人类,应用于各种行业领域。但仍有部分领域尚未得到应用,人类依然担负着执行任务的危险,例如除雷排爆,沼泽地、悬崖峭壁上采取草药等等。基于此,本无人机系统通过无人机平台搭载仿生机械臂可越过复杂的环境,到达指定区域,利用仿生机械臂,模仿人类的手部动作,执行任务,降低了人类的危险性,提高工作效率。此外,通过理论设计、仿真分析及飞行实验验证系统执行任务准确性,具有较好的应用前景。
关键词 无人机 仿生机械臂 工作效率 应用前景
1研究背景与意义
目前,无人机已应用于军事侦查、地质勘探、有毒气体监测等各个方面。但仍有局部领域无人机尚未实现,仍需进一步完善,如除雷排爆,沼泽地、悬崖峭壁上采取草药等等。基于无人机平台的仿生机械臂研发可有效地代替人类完成此任务,降低任务执行危险性,提高工作效率,具有较好的应用前景。其中,此套装置共分为无人机平台与仿生机械臂两个模块,无人机平台采用四旋翼工作平台,小型且便于携带;仿生机械臂基于STM32开发板对手部信号进行处理并传输到机械臂,机械臂对应同步实施相应手部动作。
机械臂的研发国内外已有一定的基础,Roth和Lee等最早对机械臂进行研究,并将工作空间作为机械臂设计准则。Shawky采用非线性控制器对柔性机械臂的位置实行控制,此操作可有效地补偿系统建模中模型的不确定性,有效抑制柔性臂的振动。此外,国内学者袁亮,于春梅通过ADAMS和MATLAB虚拟仿真分析机械臂模型。丁伟等K64为核心控制板,MQX_Lite为操作系统,通过与上位机的通信解析相关命令,实现对机械臂的控制。
本文通过STM32开发板,时时模仿操控人員手上的动作,减少操控人员误操作的概率,旋翼无人机搭载仿生机械臂,可跨越复杂的地形,到达指定的任务区域,具有极大的应用价值。此外,本文对整个系统进行理论建模分析并通过仿真与实验验证。设计目标为:旋翼无人机布局采用四旋翼布局,系统起飞重量不超过5kg,机械臂可抓取载荷重量不低于0.5kg,续航时间不低于15min,可有效地代替人类在复杂环境下执行任务,具有较好的应用前景,可为未来在除雷排爆、复杂环境下取物等领域提供一定的技术支持。
2旋翼平台理论模型建立
2.1旋翼平台分析流程
首先根据任务要求,估算旋翼平台的起飞重量,根据起飞重量,选配动力电机,确保动力电机所产生的总拉力大于起飞重量。其次根据动力电机提供与起飞重量相等动力时所消耗的能量选配合适的电池,确保执行任务时续航时间不低于任务要求。然后确定旋翼平台尺寸,包括电机轴距、中心板、电机座等结构,完成设计方案。最后,试飞验证并与任务要求进行对比,验证方案可行性,并进行优化。
2.2起飞重量估算
旋翼无人机常用重量类型包括:起飞重量(WTO)、结构重量(WOE)、载荷重量(WPL)、动力装置重量(WPE)、其它重量(WTH)。
将机械臂与其抓取载荷认定为旋翼无人机平台的任务载荷。根据常规经验估计机械臂质量约为1kg,而抓取任务载荷的质量为0.5kg,所以任务载荷重量WPL为15N。无人机的结构重量因子约为2/9,动力重量因子约为1/3,其它结构约占总重量的1/9。代入式(1)可得旋翼平台的起飞重量约为45N。
2.3动力电机选配
本文参考厂家提供的电机性能数据,选择的电机为飓风3508电机,电机转速参数kv值为380kv,选择的桨尺寸为DJI15*5,具体参数如表1所示。
四个电机可提供的最大总拉力为75.6N,满足旋翼无人机动力要求。此外,由于最大电流13.9A,则采用20A电调即可满足要求。
2.4电池选配
由于起飞重量约为45N,每个电机则产生的拉力约为11.25N。假设电机在电流5A~7A之间,拉力随电流是线性变化的,则单个电机所需的电流为6A。选用6S电池,由于电机总共所需的电流为24A,为满足任务要求,选用的电池储能为8000mah、25C,在24A电流放电下可续航达到20min。
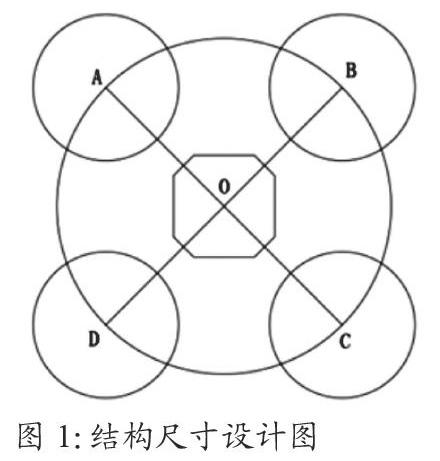
2.5结构尺寸确定
如图1所示,为设计的旋翼尺寸,其中桨叶直径采用15英寸(381mm)的碳桨,结构的轴距AC、BD为875mm,O为中心点。
3仿生机械臂模型建立
如图2所示,当操作人员手指运动时,其会带动连接臂进行旋转,连接臂带动摇臂绕旋转中心旋转,从而输入信号。输入的信号通过STM32开发板进行处理,并将处理后的命令通过433无线传输模块,传输到仿生机械臂。从图中可得,仿真机械臂可有效地模拟操作人员的手上动作,并可实现抓取的功能。
4仿真验证
为使系统性能达到最佳,需保证满足结构强度的情况下,质量达到最低,因此,对无人机平台进行结构强度损伤仿真分析。无人机平台均采用碳纤维复合材料。材料密度为1.62 g/cm3,杨氏模量为9.3GPa,泊松比为0.32。
通过ABAQUS软件,对无人机平台的结构强度进行建模分析。其中,机械臂的形状不影响无人机平台的结构强度分析,转化成任务载荷。4个电机座施加固定约束,中心板下端施加方向向下45N的力。分析得到的结果如图3、图4所示。
从图中可发现,无人机飞行平台的最大受力区域位于机臂与电机座连接处,所受到最大应力强度为11.56pa;无人机飞行平台的最大变形量位于中心板中央,变形量为5.22mm。因此,通过分析验证系统的结构强度满足强度设计要求,具有一定的合理性。
5总结与展望
通过对基于无人机平台的仿生机械臂的分析与验证,共得到以下结论:
(1)建立了旋翼平台模型及机械臂平台模型。通过理论分析计算,得到系统起飞重量、电池、电机等参数以及机械臂控制原理,选择合适型号的电池、电机等,满足设计要求;
(2)利用ABAQUS软件、对系统的结构强度进行分析,分析结果表明,系统结构强度满足设计要求,其最大受力区域位于机臂与电机座连接处,最大应力为11.56pa;此外,系统全部采用复合材料,变形量小,其最大变形量位于中心板中央,为5.22mm。
参考文献
[1] 淳于江民,张珩.无人机的发展现状与展望[J].飞航导弹,2005(02):23-27.
[2] Gupta,K.C.&B.Roth.Design Considerations for Manipulator Workspace[J].Journal of Mechanical Design,1982,104(04) :704-711.
[3] 贾世元,贾英宏,徐世杰.基于姿态可操作度的机械臂尺寸优化方法[J].北京航空航天大学学报,2015,41(09):1693-1700.
[4] 丁伟,王宜怀,贾荣媛.基于K64机械臂控制系统的设计与实现[J].电子技术应用,2017,43(12):42-45.
猜你喜欢
山东林业科技(2019年2期)2019-06-03
赤峰学院学报(蒙文哲学社会科学版)(2017年4期)2017-12-15
商业文化(2017年26期)2017-04-20
知音励志·社科版(2016年8期)2016-11-05
人间(2016年26期)2016-11-03
科学与财富(2016年28期)2016-10-14
时代英语·高二(2015年4期)2015-08-14